智能船舶因系統(tǒng)錯(cuò)誤引發(fā)的碰撞責(zé)任研究
2024-01-16 06:57:44李欣凱
研究生法學(xué) 2023年4期
李欣凱
引 言
自黨的十八大以來,我國穩(wěn)步推進(jìn)“海洋強(qiáng)國”的戰(zhàn)略目標(biāo),在全球航運(yùn)市場上正發(fā)揮著越來越大的影響力。黨的十八大報(bào)告提出“提高海洋資源開發(fā)能力,發(fā)展海洋經(jīng)濟(jì),保護(hù)海洋生態(tài)環(huán)境,堅(jiān)決維護(hù)國家海洋權(quán)益,建設(shè)海洋強(qiáng)國”;[1]胡錦濤:《堅(jiān)定不移沿著中國特色社會(huì)主義道路前進(jìn),為全面建成小康社會(huì)而奮斗——在中國共產(chǎn)黨第十八次全國代表大會(huì)上的報(bào)告》,人民出版社2012 年版,第40 頁。黨的十九大報(bào)告再次提出“堅(jiān)持陸海統(tǒng)籌,加快建設(shè)海洋強(qiáng)國”;[2]習(xí)近平:《決勝全面建成小康社會(huì) 奪取新時(shí)代中國特色社會(huì)主義偉大勝利——在中國共產(chǎn)黨第十九次全國代表大會(huì)上的報(bào)告》,人民出版社2017 年版,第33 頁。黨的二十大報(bào)告再次強(qiáng)調(diào)“發(fā)展海洋經(jīng)濟(jì),保護(hù)海洋生態(tài)環(huán)境,加快建設(shè)海洋強(qiáng)國”,“維護(hù)海洋權(quán)益,堅(jiān)定捍衛(wèi)國家主權(quán)、安全、發(fā)展利益”。[3]習(xí)近平:《高舉中國特色社會(huì)主義偉大旗幟 為全面建設(shè)社會(huì)主義現(xiàn)代化國家而團(tuán)結(jié)奮斗——在中國共產(chǎn)黨第二十次全國代表大會(huì)上的報(bào)告》,人民出版社2022 年版,第53 頁。隨著科技創(chuàng)新的高質(zhì)量發(fā)展,我國的無人船事業(yè)正駛向發(fā)展蓬勃期。2017 年,我國在《“一帶一路”建設(shè)海上合作設(shè)想》中倡議“共建智慧創(chuàng)新之路,深化在無人船等領(lǐng)域合作”。[4]劉夢:《國家發(fā)展改革委、國家海洋局聯(lián)合發(fā)布〈“一帶一路”建設(shè)海上合作設(shè)想〉》,載中國一帶一路網(wǎng)2017 年6 月20 日,https://www.yidaiyilu.gov.cn/p/16670.html。發(fā)展無人船有助于實(shí)現(xiàn)更可持續(xù)的海洋運(yùn)輸業(yè),而當(dāng)前面臨的緊迫任務(wù)是為其建構(gòu)對應(yīng)的法律框架,包括國際層面的條約協(xié)定以及國內(nèi)層面的法律法規(guī)。[5]See Igor Vio & Mate Brdar, Maritime Autonomous Surface Ships—International and National Legal Framework,62 Journal of Maritime & Transportation Science 141, 142 (2022).
在規(guī)制無人船方面,學(xué)者們的普遍觀點(diǎn)如下。其一,存在解釋既有規(guī)則和創(chuàng)制全新規(guī)則兩條徑路。[6]參見季若望:《智能汽車侵權(quán)的類型化研究——以分級(jí)比例責(zé)任為路徑》,載《南京大學(xué)學(xué)報(bào)(哲學(xué)·人文科學(xué)·社會(huì)科學(xué))》2020 年第2 期;See Ling Zhu & Wangwang Xing, Policy-oriented analysis on the navigational rights of unmanned merchant ships, 49 Maritime Policy & Management 447, 457 (2022); Sabrina Hasan, Analysing the definition of “ship” to facilitate Marine Autonomous Surface Ships as ship under the law of the sea, 4 Australian Journal of Maritime & Ocean Affairs 1, 10 (2022).前者意味著逐一審視現(xiàn)有公約的條款內(nèi)容,并通過締約國的嗣后協(xié)議(subsequent agreement)或嗣后實(shí)踐(subsequent practice)動(dòng)態(tài)解釋現(xiàn)有規(guī)則,[7]See Ling Zhu & Wangwang Xing, Policy-oriented analysis on the navigational rights of unmanned merchant ships,49 Maritime Policy & Management 447, 457-459 (2022).為其注入與無人船發(fā)展相匹配的新內(nèi)涵;后者意味著直接起草專門針對無人船的新規(guī)范。其二,鑒于公約締結(jié)與修訂的復(fù)雜性,宜先改革國內(nèi)法律框架,再改革國際法律框架。[8]See Damilola Osinuga, Unmanned Ships: Coping in the Murky Waters of Traditional Maritime Law, 174 Poredbeno pomorsko pravo 75, 101 (2020).其三,鑒于當(dāng)前并未實(shí)現(xiàn)船舶駕駛的完全無人化,大多尚處于遠(yuǎn)程控制和周期性無人(periodically unmanned)駕駛階段;且前述兩種模式對既有規(guī)則的沖擊相對較小,在短期內(nèi)對船舶運(yùn)營商也更具吸引力,宜先調(diào)整針對此類模式的法律規(guī)范。[9]See Sabrina Hasan, Analysing the definition of “ship” to facilitate Marine Autonomous Surface Ships as ship under the law of the sea, 4 Australian Journal of Maritime & Ocean Affairs 1, 11 (2022); Igor Vio & Mate Brdar, Maritime Autonomous Surface Ships—International and National Legal Framework, 62 Journal of Maritime & Transportation Science 141, 154 (2022); Henrik Ringbom, Regulating Autonomous Ships—Concepts, Challenges and Precedents, 50 Ocean Development & International Law 141, 162 (2019).
與無人機(jī)、無人車的發(fā)展相比,無人船的研發(fā)與規(guī)制都處于相對滯后狀態(tài)。[10]參見劉丹、李瑞:《無人海洋系統(tǒng)與國際法》,海洋出版社2020 年版,第9 頁。近幾年來,學(xué)者開始愈發(fā)關(guān)注無人船的相關(guān)規(guī)則適用問題,而大多研究集中在對相關(guān)公約和國內(nèi)法律法規(guī)的梳理與解釋、無人船法律地位的探討上。部分學(xué)者開始轉(zhuǎn)向?qū)唧w領(lǐng)域的探究,如無人船承運(yùn)人的責(zé)任與航行過失免責(zé)、海難救助、網(wǎng)絡(luò)風(fēng)險(xiǎn)保險(xiǎn)、海盜行為、船舶碰撞責(zé)任等,但大多僅是“蜻蜓點(diǎn)水”式地提到上述問題及其可能的規(guī)制方式,而未作全面的深入剖析。在無人船法律地位方面,現(xiàn)有文獻(xiàn)大多從條文規(guī)定出發(fā),較少關(guān)注司法層面的理解與應(yīng)用。在無人船碰撞責(zé)任方面,現(xiàn)有文獻(xiàn)大多以損害發(fā)生原因作為分類討論的基點(diǎn),籠統(tǒng)地闡釋歸責(zé)主體與歸責(zé)責(zé)任;較少關(guān)注無人船因系統(tǒng)錯(cuò)誤問題引發(fā)碰撞損害責(zé)任的現(xiàn)象普遍性與規(guī)制特殊性,以及無人船本身的“周期性無人”對碰撞責(zé)任承擔(dān)的影響。
有鑒于此,本文擬圍繞智能船舶因系統(tǒng)錯(cuò)誤引發(fā)的碰撞責(zé)任展開研究。首先,本文擬在明確界定智能船舶概念的基礎(chǔ)上,總體介紹其發(fā)展前景;其次,本文擬綜合法律文本與司法案例,回應(yīng)本源性的智能船舶法律屬性問題;再次,本文擬主要從主體和客體兩個(gè)維度著手,重點(diǎn)檢視傳統(tǒng)規(guī)則在因系統(tǒng)錯(cuò)誤引發(fā)船舶碰撞的責(zé)任問題上所面臨的挑戰(zhàn);最后,本文擬深入闡釋這一具體領(lǐng)域的規(guī)則重構(gòu)及其理念問題,提出本文所主張的區(qū)分與并行兩大理念。
一、智能船舶的概念界定與發(fā)展前景
從羅爾斯羅伊斯(Rolls-Royce)公司研發(fā)的世界上第一艘遠(yuǎn)程遙控商用船“Svitzer Hermod 號(hào)”[11]參見羅爾斯羅伊斯:《羅羅展示全球首艘遙控商船》,載微信公眾號(hào)“羅爾斯羅伊斯”,2017 年6 月27日。到世界上第一艘全自動(dòng)渡船“Falco 號(hào)”[12]參見羅爾斯羅伊斯:《羅羅與Finferries 成功展示全球首艘無人駕駛渡輪》,載微信公眾號(hào)“羅爾斯羅伊斯”,2018 年12 月10 日。,再到康斯伯格(Kongsberg)公司與雅苒(Yara)公司合作制造的世界上第一艘自動(dòng)駕駛集裝箱船“Yara Birkeland 號(hào)”[13]參見薛龍玉:《備受矚目的Yara Birkeland 號(hào)終于來了》,載微信公眾號(hào)“中國船檢”,2020 年12 月8日。;從全球第一艘萬噸級(jí)智能船舶“大智號(hào)”[14]參見江永韜:《世界領(lǐng)先!我國造出了一艘“會(huì)思考的船”》,載微信公眾號(hào)“央視新聞”,2017 年12月6 日。到我國首艘自動(dòng)駕駛貨船“筋斗云0 號(hào)”[15]參見鄺展婷:《大圣的“筋斗云”來了!我國首艘自主航行貨船首航》,載微信公眾號(hào)“中國船舶報(bào)”,2019 年12 月16 日。,再到我國首艘自主航行集裝箱船“智飛號(hào)”[16]參見中國船級(jí)社:《中國首艘、全球最大自主航行集裝箱船“智飛”號(hào)成功海試》,載微信公眾號(hào)“中國船級(jí)社CCS”,2021 年9 月16 日。,無論是國際層面還是國內(nèi)層面,智能船舶的發(fā)展正如火如荼。技術(shù)變革正催生新的法律規(guī)范需要。值此背景,下文擬先明確界定本文語境下的“智能船舶”概念,在此基礎(chǔ)上闡述智能船舶的引入與發(fā)展、優(yōu)勢與風(fēng)險(xiǎn),以及國際海事組織在規(guī)范化上所作的努力。
(一)智能船舶的概念界定
中國船級(jí)社在2015 年發(fā)布了《智能船舶規(guī)范》,并在2020 年作了新修訂。該規(guī)范第1.1.3 條對智能船舶概念作出了明確的界定。[17]2020 年《智能船舶規(guī)范》第1.1.3 條規(guī)定:“智能船舶系指利用傳感器、通信、物聯(lián)網(wǎng)、互聯(lián)網(wǎng)等技術(shù)手段,自動(dòng)感知和獲得船舶自身、海洋環(huán)境、物流、港口等方面的信息和數(shù)據(jù),并基于計(jì)算機(jī)技術(shù)、自動(dòng)控制技術(shù)和大數(shù)據(jù)處理和分析技術(shù),在船舶航行、管理、維護(hù)保養(yǎng)、貨物運(yùn)輸?shù)确矫鎸?shí)現(xiàn)智能化運(yùn)行的船舶,以使船舶更加安全、更加環(huán)保、更加經(jīng)濟(jì)和更加高效。”簡言之,智能船舶就是利用并基于各項(xiàng)技術(shù)實(shí)現(xiàn)智能化運(yùn)行的船舶。而根據(jù)該規(guī)范第1.1.2 條,[18]2020 年《智能船舶規(guī)范》第1.1.2 條規(guī)定:“智能化系指由現(xiàn)代通信與信息技術(shù)、計(jì)算機(jī)網(wǎng)絡(luò)技術(shù)、智能控制技術(shù)等匯集而成的針對某個(gè)對象的應(yīng)用,這些應(yīng)用通常包括但不限于評估、診斷、預(yù)測和決策等。智能一般具有如下特點(diǎn):(1)具有感知能力,即具有能夠感知船舶自身和設(shè)備、外部世界、獲取外部信息的能力;(2)具有記憶和思維能力,即能夠存儲(chǔ)感知到的外部信息及由思維產(chǎn)生的知識(shí),同時(shí)能夠利用已有的知識(shí)對信息進(jìn)行分析、計(jì)算、比較、判斷、聯(lián)想、決策;(3)有學(xué)習(xí)能力和自適應(yīng)能力,即通過與環(huán)境的相互作用,不斷學(xué)習(xí)積累知識(shí),使自己能夠適應(yīng)環(huán)境變化;(4)具有行為決策能力,即對外界的刺激作出反應(yīng),形成決策并傳達(dá)相應(yīng)的信息。”智能化呈現(xiàn)出四大特點(diǎn):具有感知能力、具有記憶和思維能力、有學(xué)習(xí)能力和自適應(yīng)能力、具有行為決策能力。由此可見,智能并不要求船舶達(dá)到完全不配備船員的程度,智能船舶的核心在于有智能系統(tǒng)支持船舶的各項(xiàng)作業(yè)活動(dòng),而非船上無人。因此,本文所稱的“智能船舶”(intelligent ships)不僅限于“無人船”(unmanned ships),還包括“無人船”的半程發(fā)展?fàn)顟B(tài)。此外,嚴(yán)格而言,本文所稱的“智能船舶”與“自主船舶”(autonomous ships)概念并不完全等同。自主性僅是智能化的其中一方面要求,自主并不一定智能;自主強(qiáng)調(diào)在行為方式上自行獨(dú)立決策,智能則強(qiáng)調(diào)各種行為能力的綜合。但自主性水平?jīng)Q定著智能化等級(jí),智能船舶也主要依據(jù)船舶自主水平劃分等級(jí),故下文對這兩個(gè)術(shù)語間的差異暫且忽略不計(jì)。且除特別說明之處外,本文統(tǒng)一使用“智能船舶”的表達(dá)。
(二)智能船舶的發(fā)展前景
與傳統(tǒng)意義上的有人船相比,智能船舶在效率、安全、成本、環(huán)保、工作環(huán)境等方面擁有顯著優(yōu)勢。當(dāng)前正處于5G 和后疫情疊加的時(shí)代,持續(xù)發(fā)展推進(jìn)智能船舶、逐步提高船舶自主水平直至實(shí)現(xiàn)完全的“無人”狀態(tài),乃大勢所趨。值得注意的是,智能船舶的上述優(yōu)勢存在些許質(zhì)疑,而其本身也面臨對應(yīng)法律規(guī)范匱缺的風(fēng)險(xiǎn)。可喜的是,國際海事組織海上安全委員會(huì)在這方面已經(jīng)有所行動(dòng),且初見雛形。
1.智能船舶的優(yōu)勢及其階梯式發(fā)展
2020 年《智能船舶規(guī)范》第1.1.3 條對智能船舶的定位是“更加安全、更加環(huán)保、更加經(jīng)濟(jì)和更加高效”。智能船舶具有不可比擬的優(yōu)勢,主要表現(xiàn)在下述幾個(gè)方面。其一,提高船舶安全性,據(jù)統(tǒng)計(jì)以往75%-95%的海上事故系由人為過錯(cuò)導(dǎo)致,利用縝密的科學(xué)計(jì)算作出最優(yōu)航行選擇并避免人為性海上意外。[19]參見李瑞:《無人船的法律地位研究》,載《中華海洋法學(xué)評論》2019 年第4 期,第152 頁;王國華、孫譽(yù)清:《無人貨物運(yùn)輸船的法律沖突及協(xié)調(diào)》,載《中國航海》2019 年第1 期,第77 頁。其二,智能船舶擬依托再生動(dòng)力,這有利于保護(hù)海洋環(huán)境。[20]參見王欣、初北平:《研發(fā)試驗(yàn)階段的無人船舶所面臨的法律障礙及應(yīng)對》,載《中國海商法研究》2017年第3 期,第60 頁。其三,長期而言可減少船舶運(yùn)行成本,節(jié)省的部分成本包括船員工資、生活支出、人身意外賠償?shù)取21]參見李瑞:《無人船的法律地位研究》,載《中華海洋法學(xué)評論》2019 年第4 期,第152 頁;王國華、孫譽(yù)清:《無人貨物運(yùn)輸船的法律沖突及協(xié)調(diào)》,載《中國航海》2019 年第1 期,第77 頁。其四,提升航行及運(yùn)輸效率,它無須配置傳統(tǒng)船舶上必備的供暖、船員艙室等設(shè)施,將原本的這部分空間和能耗全部轉(zhuǎn)化為運(yùn)輸所用。[22]參見王國華、孫譽(yù)清:《無人貨物運(yùn)輸船的法律沖突及協(xié)調(diào)》,載《中國航海》2019 年第1 期,第77 頁。其五,在后疫情時(shí)代,國際海員換班難、在船停留時(shí)間過長問題仍持續(xù)存在,而智能船舶無須船員在船,一定程度上可以釋放這方面的壓力。[23]See Igor Vio & Mate Brdar, Maritime Autonomous Surface Ships-International and National Legal Framework,62 Journal of Maritime & Transportation Science 141, 142 (2022).
智能船舶的發(fā)展并非一步到位,而是呈現(xiàn)階梯式特征。國際海事組織海上安全委員會(huì)、中國船級(jí)社、英國勞氏船級(jí)社等分別對船舶自主水平進(jìn)行了等級(jí)劃分。其中,中國船級(jí)社在2018 年發(fā)布的《自主貨物運(yùn)輸船舶指南》中直接采用海上安全委員會(huì)的四級(jí)劃分法,而隨后在2022 年修訂的《智能船舶規(guī)范》中則引入五級(jí)劃分法。
具體的船舶自主水平等級(jí)劃分如下圖一至圖三所示。
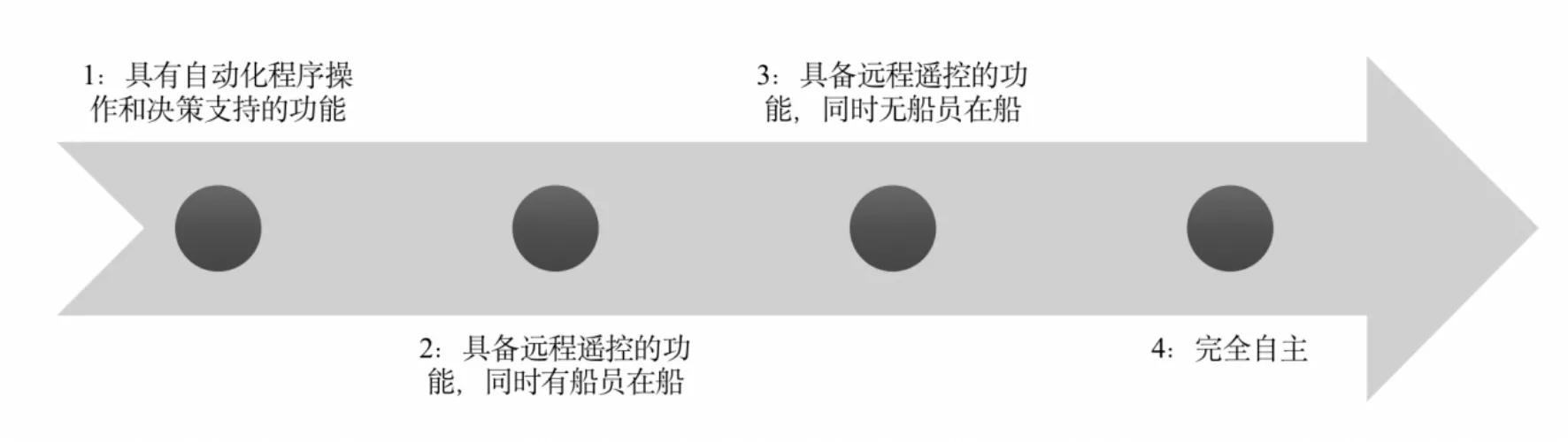
圖一 國際海事組織海上安全委員會(huì)對船舶自主水平的四級(jí)劃分
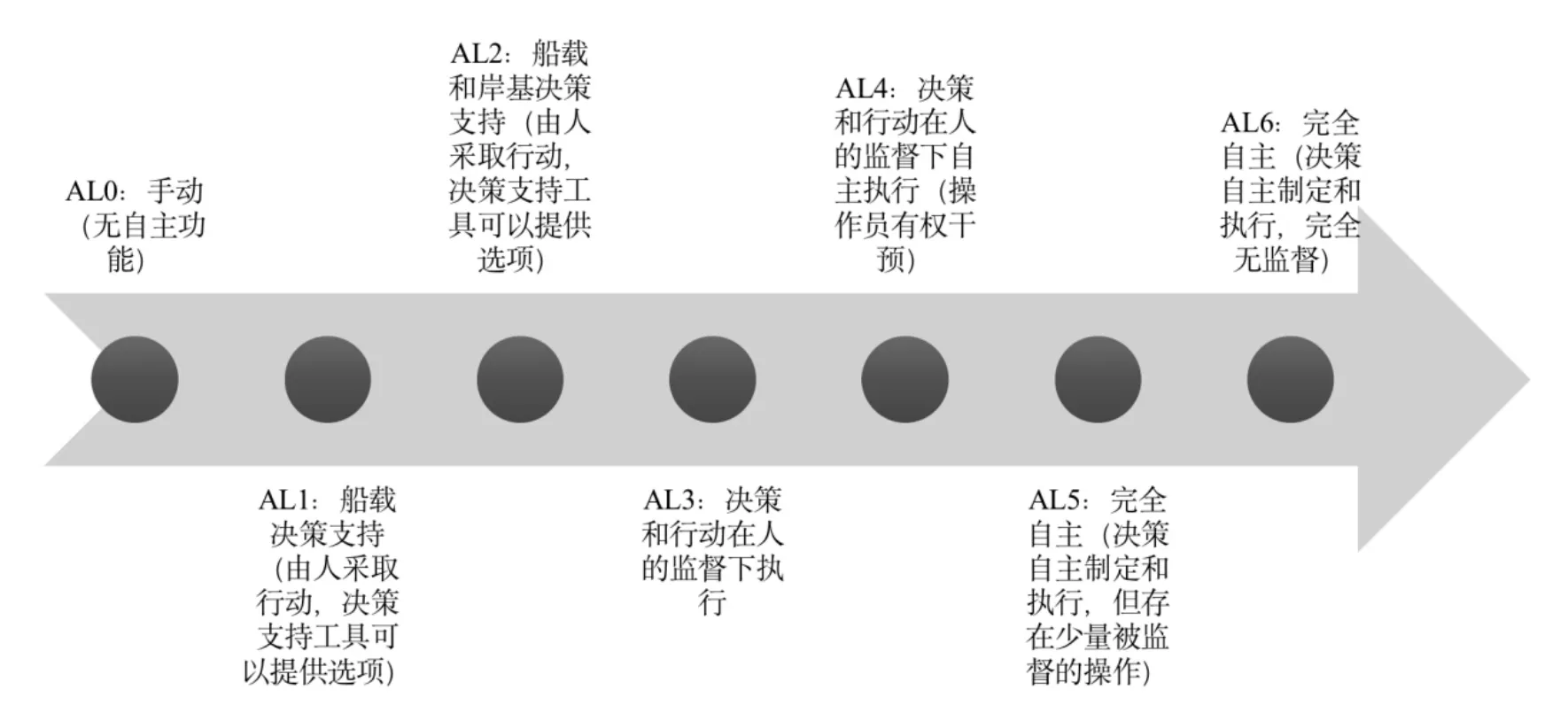
圖三 勞氏船級(jí)社對船舶自主水平的六級(jí)劃分
筆者認(rèn)為,上述對船舶自主水平的等級(jí)劃分本身無孰優(yōu)孰劣之分,可謂大同小異,差異更多集中在劃分的粗細(xì)程度上。船舶自主化的初階為遠(yuǎn)程遙控模式,高階為完全無人模式,而當(dāng)前我們正處于初階(或初階與高階的過渡形態(tài),即中階)。這一現(xiàn)實(shí)情況也是后文分析其碰撞責(zé)任的立論基礎(chǔ)。
2.智能船舶的風(fēng)險(xiǎn)及其規(guī)范化雛形
值得深思的是,智能船舶是否確實(shí)具有上述不可比擬 的優(yōu)越性。部分航運(yùn)企業(yè)認(rèn)為,智能系統(tǒng)對運(yùn)行環(huán)境的支持條件要求嚴(yán)苛,條件不滿足時(shí)數(shù)據(jù)延遲、丟失的概率較高,這反而會(huì)影響船舶的安全和高效運(yùn)行。[24]See Damilola Osinuga, Unmanned Ships: Coping in the Murky Waters of Traditional Maritime Law, 174 Poredbeno Pomorsko Pravo 75, 82 (2020).此種科學(xué)技術(shù)上的不確定性,也會(huì)招致智能船舶發(fā)生碰撞等嚴(yán)重事故,甚至導(dǎo)致災(zāi)難性的石油泄漏、海洋環(huán)境惡化。[25]See Ling Zhu & Wangwang Xing, Policy-oriented analysis on the navigational rights of unmanned merc hant ships, 49 Maritime Policy & Management 447, 456 (2022).智能船舶須增加許多遠(yuǎn)程遙控系統(tǒng)、新型自動(dòng)化裝備,還須新設(shè)岸基遙控中心、重新設(shè)計(jì)運(yùn)營方案、培訓(xùn)工作人員,由此增加的成本可能會(huì)超過其所能降低的成本。[26]參見劉丹、李瑞:《無人海洋系統(tǒng)與國際法》,海洋出版社2020 年版,第9 頁。還有學(xué)者擔(dān)心智能船舶的發(fā)展會(huì)影響海上工作崗位的分配,甚至造成海員的失業(yè)。[27]See Damilola Osinuga, Unmanned Ships: Coping in the Murky Waters of Traditional Maritime Law, 174 Poredbeno Pomorsko Pravo 75, 80 (2020).對此筆者認(rèn)為,智能船舶是時(shí)代孕育的產(chǎn)物,我們必須直面上述風(fēng)險(xiǎn)與挑戰(zhàn),盡可能地通過法律規(guī)則體系對智能船舶運(yùn)作的各環(huán)節(jié)予以規(guī)制,更好激活其潛在巨大優(yōu)勢的一面。
事實(shí)上,國際海事組織已經(jīng)著手并逐步推進(jìn)規(guī)范化智能船舶的進(jìn)程。在2017 年6 月第98 屆國際海事組織海上安全委員會(huì)上,海上自主水面船舶(Maritime Autonomous Surface Ships, MASS)被正式列入議程,自此MASS 法規(guī)監(jiān)管范圍界定(Regulatory Scoping Exercises, RSE)工作正式啟動(dòng)。經(jīng)過最近九屆會(huì)議的不斷推進(jìn)與發(fā)展,智能船舶的規(guī)范化雛形可體現(xiàn)在《海上自主水面船舶試航暫行指南》(Interim Guidelines for Maritime Autonomous Surface Ships)、MASS 目標(biāo)型文件(goal-based instrument)中。作為規(guī)則制定準(zhǔn)備階段的重要成果,暫行指南強(qiáng)調(diào)試航方式應(yīng)至少提供與相關(guān)文書規(guī)定同等程度的安全、安保和環(huán)境保護(hù);應(yīng)適當(dāng)確定與試航有關(guān)的風(fēng)險(xiǎn),并采取措施將風(fēng)險(xiǎn)控制至最低;對參與試航的船上與岸上人員均提出適當(dāng)資格與經(jīng)驗(yàn)要求;注重試航系統(tǒng)與基礎(chǔ)設(shè)施的網(wǎng)絡(luò)風(fēng)險(xiǎn)管理。[28]IMO, Autonomous shipping, IMO Media Centre, https://www.imo.org/en/MediaCentre/HotTopics/Pages/Aut onomous-shipping.aspx.(retrieved on 10 September 2023).作為規(guī)則制定磋商階段的預(yù)期成果,目標(biāo)型文件旨在規(guī)范MASS 的運(yùn)營,全面解決MASS 船長和船員的作用、責(zé)任、能力要求等問題。[29]IMO, Maritime Safety Committee (MSC 105), 20-29 April 2022, IMO Media Centre, https://www.imo.org/en/MediaCentre/MeetingSummaries/Pages/MSC-105th-session.aspx.(retrieved on 10 September 2023).海上安全委員會(huì)意圖先通過非強(qiáng)制性方式規(guī)制智能船舶,而當(dāng)相應(yīng)規(guī)范具備上升為國際共識(shí)乃至習(xí)慣的時(shí)機(jī)和條件時(shí),再賦予這些目標(biāo)型文件等MASS 準(zhǔn)則(MASS Code)以強(qiáng)制性的色彩。其中,智能船舶的碰撞責(zé)任承擔(dān)與分?jǐn)倖栴}也是規(guī)范化進(jìn)程中的重要議題之一,后文將對此展開討論。國際海事組織所作的努力及其歷屆會(huì)議成果雛形,詳見附錄一表一。

表一 各國對無人船智能系統(tǒng)錯(cuò)誤致?lián)p中責(zé)任分?jǐn)倖栴}的回應(yīng)[60] 表一中的內(nèi)容系筆者根據(jù)國際海事委員會(huì)國際工作組(CMI IWG)向海上安全委員會(huì)(MSC)第99 屆會(huì)議提交的附件一(Summary of Responses to the CMI Questionnaire on Unmanned Ships)整理而得,參見國際海事委員會(huì)官網(wǎng)(http://www.comitemaritime.org)。
二、智能船舶的法律屬性
智能船舶的法律屬性系本源性問題。明確智能船舶的法律屬性,是對其進(jìn)行妥善規(guī)制的基礎(chǔ)。[30]參見孫譽(yù)清:《商用無人船法律地位的界定》,載《武大國際法評論》2019 年第6 期,第118 頁。在討論因系統(tǒng)錯(cuò)誤引發(fā)船舶碰撞的責(zé)任規(guī)則問題之前,我們必須首先回應(yīng)兩個(gè)問題:一是智能船舶能否納入傳統(tǒng)上以“有人船”為建構(gòu)主體的“船舶”范疇,這關(guān)乎船舶碰撞責(zé)任及海事賠償責(zé)任限制規(guī)則的適用問題;二是智能船舶整體或智能系統(tǒng)部分本身是否可以落入“產(chǎn)品”的范疇,這關(guān)乎產(chǎn)品缺陷責(zé)任的援引問題。
(一)智能船舶屬于船舶
從條文規(guī)定層面來看,首先,在聯(lián)合國(UN)、國際海事組織(IMO)、國際海事委員會(huì)(CMI)、國際勞工組織(ILO)的公約框架內(nèi),超半數(shù)以上的國際海事條約或議定書未規(guī)定船舶定義條款。[31]上述組織框架內(nèi)的相關(guān)公約梳理參見孫譽(yù)清:《商用無人船法律地位的界定》,載《武大國際法評論》2 019 年第6 期,第120-122 頁。而規(guī)定船舶定義的條款也不盡相同,即目前在船舶定義上缺乏統(tǒng)一性。但這可能是“因禍得福”,為船舶定義的延伸提供了靈活性可能,使得智能船舶也能被涵蓋進(jìn)去。[32]See Damilola Osinuga, Unmanned Ships: Coping in the Murky Waters of Traditional Maritime Law, 174 Poredbeno pomorsko pravo 75, 86 (2020).智能船舶意味著船上可能不再配備船員,但這并不會(huì)影響其船舶屬性的獲得,因?yàn)楝F(xiàn)有條約或議定書均未將配備船員作為構(gòu)成船舶的必備要素。從邏輯而言,若將船舶配員情況作為船舶構(gòu)成的決定性因素,則會(huì)導(dǎo)致邏輯悖論:船員在船上時(shí),該船構(gòu)成船舶;全體船員下船后,同樣的船卻不再構(gòu)成船舶。[33]參見孫譽(yù)清:《商用無人船法律地位的界定》,載《武大國際法評論》2019 年第6 期,第134 頁。現(xiàn)有條約或議定書也未明確禁止遠(yuǎn)程履行航運(yùn)職能,而根據(jù)“法無禁止即可為”原則,在沒有明文禁止情形下,賦予遠(yuǎn)程遙控型智能船舶“船舶”的屬性具有正當(dāng)性。[34]See Henrik Ringbom, Regulating Autonomous Ships-Concepts, Challenges and Precedents, 50 Ocean Dev elopment & International Law 141, 160 (2019).
其次,我國《海商法》《海上交通安全法》《船舶和海上設(shè)施檢驗(yàn)條例》《船舶登記條例》等法律法規(guī)在定義船舶時(shí),[35]1992 年《海商法》第3 條規(guī)定:“本法所稱船舶,是指海船和其他海上移動(dòng)式裝置,但是用于軍事的、政府公務(wù)的船舶和20 總噸以下的小型船艇除外。前款所稱船舶,包括船舶屬具。”2021 年《海上交通安全法》第1 17 條第1 款規(guī)定:“船舶,是指各類排水或者非排水的船、艇、筏、水上飛行器、潛水器、移動(dòng)式平臺(tái)以及其他移動(dòng)式裝置。”2019 年《船舶和海上設(shè)施檢驗(yàn)條例》第29 條第1 款規(guī)定:“船舶,是指各類排水或者非排水船、艇、水上飛機(jī)、潛水器和移動(dòng)式平臺(tái)。”2014 年《船舶登記條例》第56 條第1 款規(guī)定:“‘船舶’系指各類機(jī)動(dòng)、非機(jī)動(dòng)船舶以及其他水上移動(dòng)裝置,但是船舶上裝備的救生艇筏和長度小于5 米的艇筏除外。”也均未包含搭載船員的要件。[36]因本文論證重點(diǎn)在于碰撞責(zé)任,故對于船舶界定部分的配員問題僅作簡單交代而不予贅述。以《海商法》為例,它從可航性、建造規(guī)模、目的、區(qū)域四個(gè)方面加以界定。2018 年11 月的修訂征求意見稿作了細(xì)微調(diào)整,進(jìn)一步明確了船舶的航行區(qū)域要求,[37]2018 年11 月《海商法(修訂征求意見稿)》第1.3 條規(guī)定:“本法所稱船舶,是指海上或者與海相通可航水域的移動(dòng)式裝置。但是,用于軍事的、政府公務(wù)的船舶以及20 總噸以下的小型船艇除外。前款所稱船舶,包括船舶屬具。”2020 年1 月的修改送審稿則保留原條文的規(guī)制方式,即均未在“無須搭載船員”問題上發(fā)生態(tài)度轉(zhuǎn)變。最后,2017 年CMI 問題單第1.1 問:“一艘500 總噸以上的無人船是否構(gòu)成國內(nèi)法下的船舶?”[38]2017 年3 月,CMI 無人船工作組向其成員發(fā)放一份問題單。該問題單共計(jì)18 題,旨在了解各國對部分國際規(guī)則和原則的理解和應(yīng)用在多大程度上將會(huì)或可以適用于無人操作。問題涵蓋無人船中船舶、船長、船員的認(rèn)定,船舶登記,《聯(lián)合國海洋法公約》《國際海上人命安全公約》《國際海上避碰規(guī)則公約》《海員培訓(xùn)、發(fā)證和值班公約》的適用、法律責(zé)任等。截至2018 年2 月13 日,工作組已收到19 個(gè)國家的答復(fù)。巴拿馬指出無人船是否構(gòu)成船舶須交由國內(nèi)行政部門決定,克羅地亞則表示無人船不具有適航性,因而在國內(nèi)法項(xiàng)下難以構(gòu)成船舶。而參與問卷調(diào)查的19 個(gè)國家中有17 個(gè)對此持肯定立場。
從司法實(shí)踐層面來看,域外法院對船舶認(rèn)定的標(biāo)準(zhǔn)各異。例如,在“Slops 號(hào)”案中,針對最初被設(shè)計(jì)和建造為運(yùn)載石油貨物的油輪,后被改裝為接收和處理油性廢物的浮動(dòng)設(shè)施,希臘上訴法院以“其一直停泊在固定點(diǎn),只作為專門用于接收和處理廢油的單位,不具有運(yùn)輸能力”為由認(rèn)定“Slops 號(hào)”不屬于船舶;希臘最高法院嗣后推翻了上訴法院的判決,將“Slops 號(hào)”定位為移動(dòng)式平臺(tái),進(jìn)而屬于船舶的范疇。[39]See Slops v.International Oil Pollution Compensation Fund 1992, Greek Supreme Court 23 (2006).又如,在Guardian Offshore AU Pty Ltd v.Saab Seaeye Leopard 1702 Remote Operated Vehicle 案中,澳大利益聯(lián)邦法院基于船舶定義的三要素否定涉案“Seaeye”遠(yuǎn)程操作水上交通工具的船舶屬性。該法院指出,船舶定義的三要素即船舶應(yīng)具備的慣常屬性(usual attributes, customary attributes)包括:第一,船只(vessel);第二,用于水上航行;第三,在水中移動(dòng)。[40]See Guardian Offshore AU Pty Ltd v.Saab Seaeye Leopard 1702 Remotely Operated Vehicle Lately on Board the Ship “Offshore Guardian” and Another, FCA 273 (2020).但正如上述“Seaeye”案中批評者所主張的那樣,目前盡管存在所謂的船舶定義“慣常屬性”測試,但“慣常屬性”的數(shù)量事實(shí)上還是不明的。再者,筆者認(rèn)為,第一層的船只測試可能反而會(huì)將船舶界定問題復(fù)雜化,形成船舶與船只自我循環(huán)論證的邏輯怪象。質(zhì)言之,在智能船舶是否屬于船舶的問題上,域外法院認(rèn)為其仍是一個(gè)印象問題(a matter of impression)。域外涉船舶界定的其他典型案例,詳見附錄二表二。
表二 智能船舶因系統(tǒng)錯(cuò)誤引發(fā)的碰撞責(zé)任規(guī)則體系
鑒于國際海事組織自2017 年起推進(jìn)智能船舶的監(jiān)管規(guī)范化工作,故筆者擬以2018-2022 年(合計(jì)5 年的時(shí)間跨度)為研究時(shí)間段,分析比較我國法院在船舶界定上的主要觀點(diǎn)。近五年來,我國尚不存在正面回應(yīng)智能船舶是否屬于船舶的現(xiàn)實(shí)案例,且大部分案件沒有充分論證乃至幾乎沒有論證船舶界定的理由,但我們?nèi)钥梢詮闹谢蚨嗷蛏俚馗Q見法院在認(rèn)定船舶時(shí)重點(diǎn)考慮的主要因素。例如,在上海港國際客運(yùn)中心開發(fā)有限公司與星客特(上海)汽車服務(wù)有限公司仲裁程序中的財(cái)產(chǎn)保全案中,上海海事法院認(rèn)定涉案未登記的游艇屬于船舶,因?yàn)樗挠猛臼窃诤I稀⑼êK蚝叫校崔k理船舶登記并不會(huì)影響其船舶屬性。[41]參見上海海事法院民事裁定書,(2019)滬72 財(cái)保293 號(hào)。又如,在珠海橫琴新區(qū)佳鑫源發(fā)展有限公司、吳云租賃合同糾紛案中,廣東省珠海市中級(jí)人民法院以“涉案浮船的功能是浮動(dòng)碼頭,而非為了航運(yùn)作業(yè)在海上行駛”為由,認(rèn)定涉案浮船不屬于船舶。[42]參見廣州海事法院民事裁定書,(2018)粵72 民初1738 號(hào)。從涉船舶定義案例歸納可得,要構(gòu)成我國法律意義上的船舶須具有可移動(dòng)性、可航性,其目的和功能是為了航運(yùn)作業(yè),且登記與否不影響其船舶屬性的獲得。智能船舶顯然可以滿足上述要件,從這個(gè)意義上說,智能船舶屬于船舶具有一定的實(shí)踐支撐。我國2018-2022 年期間涉船舶界定的案例,詳見附錄三表三。
綜上,智能船舶至少在形式意義上、應(yīng)然意義上屬于船舶。但由于現(xiàn)行規(guī)則難以與智能船舶的特性相契合,故目前其尚不具有實(shí)質(zhì)意義上、實(shí)然意義上的船舶地位,[43]參見孫譽(yù)清:《商用無人船法律地位的界定》,載《武大國際法評論》2019 年第6 期,第136 頁;王國華、孫譽(yù)清:《無人貨物運(yùn)輸船的法律沖突及協(xié)調(diào)》,載《中國航海》2019 年第1 期,第78 頁。這也正是規(guī)則調(diào)整的方向所在。
(二)智能船舶屬于產(chǎn)品
在回答智能船舶是否屬于產(chǎn)品的問題之前,須先回答智能船舶是否屬于物的問題,而這需要回歸船舶以及人工智能的法律地位問題。相關(guān)概念之間的層次關(guān)系如下圖四所示。
在人工智能的法律地位上,學(xué)界歷來存在爭議,大體有“客體說”“主體說”以及“電子人說”。[44]參見張志堅(jiān)、項(xiàng)波:《科技與法律的碰撞:無人駕駛汽車法律規(guī)制研究》,知識(shí)產(chǎn)權(quán)出版社2021 年版,第35-59 頁;楊夢露:《無人駕駛事故責(zé)任研究》,九州出版社2021 年版,第7-9 頁。“電子人說”是學(xué)者在研究無人車時(shí)新近提出的主張,以應(yīng)對無人車事故中的侵權(quán)責(zé)任問題。在該主張項(xiàng)下,無人車硬件本身可形成一定的空間,其可視為法人的經(jīng)營場所,硬件所有權(quán)人、軟件所有權(quán)人以及數(shù)據(jù)所有權(quán)人為電子法人之法定股東;三者共同出資的財(cái)產(chǎn),為無人車獨(dú)立的財(cái)產(chǎn);在發(fā)生侵權(quán)行為時(shí),三者以其出資為限承擔(dān)有限責(zé)任,無人車則以該筆獨(dú)立財(cái)產(chǎn)對外承擔(dān)責(zé)任。[45]參見張志堅(jiān)、項(xiàng)波:《科技與法律的碰撞:無人駕駛汽車法律規(guī)制研究》,知識(shí)產(chǎn)權(quán)出版社2021 年版,第35-59 頁;張志堅(jiān)、曾曉梅:《無人駕駛汽車電子化運(yùn)營:優(yōu)勢、法律風(fēng)險(xiǎn)與規(guī)制》,載《行政管理改革》2022年第1 期,第73 頁。對此筆者認(rèn)為,該主張具有一定的合理性,但鑒于目前人工智能尤其是智能船舶的發(fā)展現(xiàn)狀,此種擬制界定未免存在超前之虞。再者,現(xiàn)階段的人工智能尚不具有完全性自主意志,故當(dāng)今及未來一段時(shí)間仍宜因循傳統(tǒng)路徑,將其作為法律上的客體。[46]參見王利明:《人工智能時(shí)代對民法學(xué)的新挑戰(zhàn)》,載《東方法學(xué)》2018 年第3 期,第5 頁;楊夢露:《無人駕駛事故責(zé)任研究》,九州出版社2021 年版,第101-103 頁。更進(jìn)一步而言,雖然人工智能的硬件、軟件、數(shù)據(jù)復(fù)合體形式給傳統(tǒng)意義上的“一物一權(quán)”原則帶來極大沖擊,[47]參見張志堅(jiān)、項(xiàng)波:《科技與法律的碰撞:無人駕駛汽車法律規(guī)制研究》,知識(shí)產(chǎn)權(quán)出版社2021 年版,第10-17 頁。但這不能根本上否定人工智能當(dāng)前仍存在“近物性”的一面。而在船舶的法律地位上,誠然,船舶具有人格化的性質(zhì)。但我國目前僅將船舶相關(guān)人員作為責(zé)任主體,而非船舶本身,《海商法》的修訂過程似乎也釋放了上述信號(hào)。[48]1992 年《海商法》第168 條規(guī)定:“船舶發(fā)生碰撞,是由于一船的過失造成的,由有過失的船舶負(fù)賠償責(zé)任。”2018 年11 月《海商法(修訂征求意見稿)》第9.4 條和2020 年1 月《海商法(修改送審稿)》第197 條規(guī)定:“船舶發(fā)生碰撞,是由于一方的過失造成的,由有過失的一方負(fù)賠償責(zé)任。”由此可見,上述條文并未進(jìn)行實(shí)質(zhì)修改,但似乎隱含否認(rèn)船舶主體地位的意思,更強(qiáng)調(diào)人的過錯(cuò)責(zé)任,而非物的責(zé)任。
智能船舶屬于物,下一步所要回答的問題是——智能船舶是否屬于產(chǎn)品,以及僅僅只有智能系統(tǒng)部分本身就屬于產(chǎn)品,還是包括系統(tǒng)在內(nèi)的智能船舶整體才屬于產(chǎn)品?對此筆者認(rèn)為,智能船舶屬于產(chǎn)品,且從部分和整體兩個(gè)維度均可將其歸入產(chǎn)品的范疇,理由如下。其一,智能船舶上搭載的系統(tǒng)本身亦屬于復(fù)合體,是設(shè)備、軟件、更新維護(hù)服務(wù)的綜合,是無形與有形的統(tǒng)一體。[49]參見范曉波、陳怡潔:《船舶無人化趨勢下AI 航行系統(tǒng)的責(zé)任探析》,載《中國海商法研究》2021 年第4 期,第40 頁。其二,系統(tǒng)部分本身與智能船舶整體具有可分性,現(xiàn)實(shí)中亦存在系統(tǒng)提供來源于單獨(dú)廠商的情形,承認(rèn)部分與整體共同的產(chǎn)品屬性,也是為責(zé)任承擔(dān)掃清障礙。其三,《產(chǎn)品質(zhì)量法》要求產(chǎn)品須經(jīng)過加工、制作,用于銷售,不屬于建設(shè)工程,[50]《產(chǎn)品質(zhì)量法》第2 條第2 款規(guī)定:“本法所稱產(chǎn)品是指經(jīng)過加工、制作,用于銷售的產(chǎn)品。”第3 款規(guī)定:“建設(shè)工程不適用本法規(guī)定;但是,建設(shè)工程使用的建筑材料、建筑構(gòu)配件和設(shè)備,屬于前款規(guī)定的產(chǎn)品范圍的,適用本法規(guī)定。”智能船舶顯然滿足上述要件。其四,從國際上來看,聯(lián)合國教科文組織通過的《關(guān)于機(jī)器人倫理的初步草案報(bào)告》及歐洲議會(huì)表決通過的《歐洲機(jī)器人技術(shù)民事法律規(guī)則》主張人工智能設(shè)備應(yīng)當(dāng)適用產(chǎn)品責(zé)任。[51]UNESCO, Report of COMEST on Robotics Ethics, UNESCO Programme and Meeting Document (14 September 2017), https://unesdoc.unesco.org/ark:/48223/pf0000253952; Mady Delvaux, Georg Mayer & Micha? Boni, Report with Recommendations to the Commission on Civil Law Rules on Robotics (2015/2103(INL)), European Parliament Report (27 January 2017), https://www.europarl.europa.eu/doceo/document/A-8-2017-0005_EN.html.亦即,將智能船舶歸屬于產(chǎn)品與國際觀點(diǎn)和趨勢相契合。綜上,智能船舶及其系統(tǒng)均屬于產(chǎn)品的范疇。
三、因系統(tǒng)錯(cuò)誤引發(fā)船舶碰撞的責(zé)任規(guī)則檢視
傳統(tǒng)意義上,若船舶發(fā)生碰撞事故,則很可能是人為因素所致,即可歸因于船長、船員、船舶所有人、經(jīng)營人、管理人的過失。根據(jù)過錯(cuò)責(zé)任原則與雇主替代責(zé)任理論,直接追究船舶所有人等的船舶碰撞損害賠償責(zé)任即可。而在智能航運(yùn)時(shí)代,航行更多依賴于系統(tǒng)的自我計(jì)算,若發(fā)生航海事故,則更可能是智能船舶因自身系統(tǒng)錯(cuò)誤而導(dǎo)致的。[52]參見韓立新、夏文豪:《中國無人船的政策與法律規(guī)則應(yīng)對》,載《海洋法律與政策》2021 年第1 期,第56 頁。誠然,第三人原因等亦會(huì)造成智能船舶的碰撞事故。但與有人船相比,其最大的不同在于系統(tǒng)錯(cuò)誤而引發(fā)的損害及其責(zé)任,這就使碰撞責(zé)任問題趨于復(fù)雜化與多元化。故下文擬將致?lián)p原因限定在“因系統(tǒng)錯(cuò)誤而引發(fā)的”這一類型上。
傳統(tǒng)上,船舶碰撞損害賠償責(zé)任須滿足下述要件:第一,船舶符合我國《海商法》的要求;第二,碰撞發(fā)生在船舶之間;第三,船舶之間有接觸;第四,存在損害后果;第五,碰撞發(fā)生在海上或與海相通的可航水域。針對第一個(gè)要件,前文已論證,智能船舶可以劃入我國《海商法》的船舶范疇。針對其余四個(gè)要件,因本文探討的是智能船舶因系統(tǒng)錯(cuò)誤引發(fā)碰撞的責(zé)任配置問題,主要處理的是外部結(jié)構(gòu)層面不同主體可能的責(zé)任構(gòu)成與承擔(dān)依據(jù)問題,故后文擬假定上述四個(gè)要件均已滿足,并在該大前提下探討具體的責(zé)任體系問題。
在責(zé)任承擔(dān)與分?jǐn)偡矫妫F(xiàn)有規(guī)定均未作出正面回應(yīng),而可能的規(guī)制徑路有:一是船舶所有人、經(jīng)營人、管理人等的船舶碰撞損害賠償責(zé)任,在非故意情形下還可依法定程序向法院申請海事賠償責(zé)任限制;二是系統(tǒng)提供商、智能船舶制造商等的產(chǎn)品缺陷責(zé)任。這兩種規(guī)制徑路的關(guān)系如何,在實(shí)際應(yīng)用時(shí)可能會(huì)面臨哪些挑戰(zhàn),這是下文擬檢視的要點(diǎn)。
(一)新主體的出現(xiàn)與傳統(tǒng)主體的角色轉(zhuǎn)變
與智能船舶研發(fā)制造及運(yùn)營作業(yè)相關(guān)的人員可能有:智能系統(tǒng)提供商、遠(yuǎn)程運(yùn)營商、船廠、銷售者、船舶所有人、承運(yùn)人。其中,前兩個(gè)為新主體,后四個(gè)為傳統(tǒng)主體,但其作用已儼然發(fā)生轉(zhuǎn)變。而隨著新型航運(yùn)科技公司的出現(xiàn),智能系統(tǒng)提供商與船廠的角色和職責(zé)將合二為一。[53]參見范曉波、陳怡潔:《船舶無人化趨勢下AI 航行系統(tǒng)的責(zé)任探析》,載《中國海商法研究》2021 年第4 期,第42 頁。
值得探討的是,在半自主即遠(yuǎn)程遙控階段的智能船舶作業(yè)時(shí),其對岸基操控人員的素質(zhì)要求如何?與傳統(tǒng)意義上的船員相比,其須具備更高的素質(zhì)還是在素質(zhì)門檻上有所放寬?這關(guān)乎人機(jī)關(guān)系及后續(xù)的責(zé)任承擔(dān)與分?jǐn)倖栴}。有的學(xué)者主張岸基操控人員也必須具備一定的素質(zhì),與合格的船員素質(zhì)相當(dāng),甚至是更高水平;除了航海知識(shí),他們還應(yīng)該擁有信息技術(shù)和最先進(jìn)系統(tǒng)方面的知識(shí)儲(chǔ)備。[54]See Michael Boviatsis & George Vlachos, Sustainable Operation of Unmanned Ships under Current International Maritime Law, 14 Sustainability 1, 6 (2022).有的學(xué)者則主張傳統(tǒng)船長、船員的職責(zé)與岸基操控人員未來可能承擔(dān)的職責(zé)截然不同,且不太可能要求后者具備航海技術(shù)、導(dǎo)航、通信和海洋工程方面的資質(zhì)才能在岸基控制中心操控船舶。[55]See Damilola Osinuga, Unmanned Ships: Coping in the Murky Waters of Traditional Maritime Law, 174 Poredbeno Pomorsko Pravo 75, 88 (2020).筆者更支持前者的觀點(diǎn),技術(shù)的進(jìn)步與人的主觀能動(dòng)性發(fā)揮之間并無此消彼長的關(guān)系,技術(shù)發(fā)展并不當(dāng)然意味著可以對人的素質(zhì)要求門檻有所放寬,否則會(huì)形成主體責(zé)任向系統(tǒng)責(zé)任逃逸的怪象。
再者,智能系統(tǒng)提供商是否需要為系統(tǒng)違背倫理道德的決策買單?亦即,在判斷系統(tǒng)是否存在決策過錯(cuò)時(shí),須進(jìn)行純粹的技術(shù)判斷,還是道德與技術(shù)的綜合判斷?有的學(xué)者認(rèn)為系統(tǒng)本身包含其研發(fā)者的個(gè)人倫理傾向與選擇,如在遇到類似的“電車難題”時(shí),系統(tǒng)的計(jì)算結(jié)果與反應(yīng)實(shí)際上代表的是研發(fā)者的意志;一旦系統(tǒng)作出違背倫理道德的決策,須及時(shí)追究背后人員的相應(yīng)責(zé)任。[56]參見楊夢露:《無人駕駛事故責(zé)任研究》,九州出版社2021 年版,第105-106 頁。有的學(xué)者則認(rèn)為智能系統(tǒng)存在發(fā)展后期深度學(xué)習(xí)的問題,而這是研發(fā)者在設(shè)計(jì)當(dāng)時(shí)所無法預(yù)見的,我們也無法苛求系統(tǒng)自身作出理性的道德評判,故應(yīng)采剔除道德因素的純粹技術(shù)性判斷。[57]參見季若望:《智能汽車侵權(quán)的類型化研究——以分級(jí)比例責(zé)任為路徑》,載《南京大學(xué)學(xué)報(bào)(哲學(xué)·人文科學(xué)·社會(huì)科學(xué))》2020 年第2 期,第127-128 頁。筆者更支持后者的觀點(diǎn),系統(tǒng)在研發(fā)出來之后,就具有相對獨(dú)立性,并非研發(fā)者個(gè)人意志的附體。在此種情形下,若經(jīng)證實(shí)不具有期待可能性與預(yù)見可能性,則系統(tǒng)提供商原則上無須為此買單。此系社會(huì)整體須承受的技術(shù)風(fēng)險(xiǎn),但亦不排除上述主體在公平責(zé)任范圍內(nèi)適當(dāng)分?jǐn)傄欢ǖ膿p害賠償責(zé)任。質(zhì)言之,新主體的出現(xiàn)與傳統(tǒng)主體的角色轉(zhuǎn)變,使得各方之間的既有法律關(guān)系趨于緊張化,[58]See Henrik Ringbom, Regulating Autonomous Ships-Concepts, Challenges and Precedents, 50 Ocean Development & International Law 141, 147 (2019).傳統(tǒng)義務(wù)與責(zé)任理論難以有效應(yīng)對。
(二)船舶碰撞責(zé)任與產(chǎn)品缺陷責(zé)任的交織
在智能船舶作業(yè)模式下,船員等傳統(tǒng)主體向智能系統(tǒng)讓渡全部或部分的航行控制與決策權(quán),系統(tǒng)基于這部分職責(zé)的履行會(huì)衍生相應(yīng)的義務(wù)與責(zé)任,最終結(jié)果可能是發(fā)生碰撞事故后系統(tǒng)提供商、生產(chǎn)者等亦會(huì)被納入責(zé)任主體范疇。事實(shí)上,國際海事委員會(huì)也特別關(guān)注產(chǎn)品缺陷責(zé)任在智能船舶領(lǐng)域的引入與作用可能。2017 年CMI 問題單第6.1 問“假設(shè)一艘船系自主航行,即依托一個(gè)完全計(jì)算機(jī)化的導(dǎo)航/防撞系統(tǒng),而該系統(tǒng)發(fā)生故障,并且該故障是造成碰撞損失的唯一原因;此時(shí)根據(jù)各國國內(nèi)法,船東和自主系統(tǒng)的制造商之間應(yīng)如何分配責(zé)任?”在參與問卷調(diào)查的19 個(gè)國家中,大多數(shù)國家采用以過錯(cuò)為基礎(chǔ)的碰撞責(zé)任,有些國家還補(bǔ)充可以根據(jù)產(chǎn)品責(zé)任規(guī)則追究制造商的責(zé)任,但這主要適用于人身傷害。[59]該問注釋特別指出,該問題沒有包含足夠的信息,海商法協(xié)會(huì)無法(以統(tǒng)一的方式)進(jìn)一步闡述有關(guān)替代責(zé)任或舉證責(zé)任規(guī)則等方面的國內(nèi)法,這些規(guī)則在特定情況下可能使船舶所有人承擔(dān)責(zé)任,也可能使其不承擔(dān)責(zé)任。答復(fù)信息僅限于涉及船舶所有人對外部第三方責(zé)任的信息,而不包括與制造商有關(guān)的內(nèi)部責(zé)任。各國的回答詳見下表一。
由此可見,各國普遍認(rèn)可船東和自主系統(tǒng)之間的責(zé)任分?jǐn)偅謹(jǐn)偦鶞?zhǔn)系相對因果關(guān)系與比較過失。亦即,二者對內(nèi)承擔(dān)的是按份責(zé)任,對外若造成人身傷亡則須承擔(dān)連帶責(zé)任,之后是內(nèi)部的按過失比例追償問題。如此,船舶碰撞責(zé)任就與產(chǎn)品缺陷責(zé)任相互交織在一起,隨之而來的問題是系統(tǒng)提供商能否進(jìn)一步享有海事賠償責(zé)任限制的抗辯權(quán)優(yōu)待?特別是對于新型航運(yùn)科技公司而言,其兼具船舶所有人與智能系統(tǒng)生產(chǎn)者的雙重角色,這一性質(zhì)是否會(huì)影響其海事賠償責(zé)任限制的取得與應(yīng)用?
此時(shí)須區(qū)分產(chǎn)品責(zé)任的子類型,若屬于產(chǎn)品瑕疵責(zé)任,受害者對系統(tǒng)生產(chǎn)者提起一般侵權(quán)之訴,則理論上基于海事賠償責(zé)任限制的創(chuàng)制初衷與主體擴(kuò)大化趨向,系統(tǒng)生產(chǎn)者可以享受海事賠償責(zé)任限制的抗辯權(quán)優(yōu)待;若屬于產(chǎn)品缺陷責(zé)任,則系統(tǒng)生產(chǎn)者仍無法享受此種優(yōu)待。[61]參見范曉波、陳怡潔:《船舶無人化趨勢下AI 航行系統(tǒng)的責(zé)任探析》,載《中國海商法研究》2021 年第4 期,第49-50 頁。新型航運(yùn)科技公司內(nèi)部具有相對獨(dú)立性與可分性,不同角色可對應(yīng)不同的責(zé)任規(guī)則。否定產(chǎn)品缺陷項(xiàng)下系統(tǒng)生產(chǎn)者可進(jìn)而行使海事賠償責(zé)任限制的抗辯權(quán),與產(chǎn)品缺陷嚴(yán)格責(zé)任原則以及全面保護(hù)與救濟(jì)理念一脈相承。質(zhì)言之,兩類責(zé)任的相互交織狀態(tài)給處理智能船舶碰撞責(zé)任規(guī)則問題帶來新的挑戰(zhàn),在重構(gòu)相應(yīng)規(guī)則體系時(shí)更應(yīng)精細(xì)作業(yè)、分類討論、抽絲剝繭。
還需要指出的是,按照傳統(tǒng)理論以及《海商法》《民法典》《產(chǎn)品質(zhì)量法》等規(guī)范群的規(guī)定,船舶碰撞責(zé)任遵循過錯(cuò)責(zé)任的歸責(zé)原則,而產(chǎn)品缺陷責(zé)任遵循無過錯(cuò)責(zé)任的歸責(zé)原則。上述兩類責(zé)任的相互交織,也引發(fā)了學(xué)者們的進(jìn)一步深思:是否有必要改變船舶碰撞過錯(cuò)責(zé)任的傳統(tǒng)思維,全面引進(jìn)《民法典》“產(chǎn)品責(zé)任”一章與《產(chǎn)品質(zhì)量法》中的無過錯(cuò)責(zé)任構(gòu)造體系?更為上位的討論乃關(guān)乎整個(gè)《海商法》的存廢問題,智能船舶時(shí)代的到來及其迅速發(fā)展,是否會(huì)導(dǎo)致《海商法》的全盤顛覆甚至于消失?對此,筆者認(rèn)為沒有必要將船舶碰撞責(zé)任革新為一種無過錯(cuò)責(zé)任,《海商法》也不會(huì)因智能船舶的發(fā)展演進(jìn)而消失;[62]參見曲亞囡、申傲:《海商法視角下對CMI 無人船調(diào)查問卷的思考》,載《海洋開發(fā)與管理》2021 年第4 期,第31-32 頁。相反,它可以在完善相應(yīng)規(guī)則、提高與智能船舶特性適配性的基礎(chǔ)上煥發(fā)更為強(qiáng)大的生機(jī)與活力,為智能船舶事業(yè)的穩(wěn)步健康發(fā)展提供規(guī)范性支撐力量。后文擬詳述這兩類責(zé)任之間的并行關(guān)系。
四、因系統(tǒng)錯(cuò)誤引發(fā)船舶碰撞的責(zé)任規(guī)則重構(gòu)
基于前文所述的問題復(fù)雜性與傳統(tǒng)規(guī)則應(yīng)用時(shí)的失靈,當(dāng)前亟須重構(gòu)相應(yīng)的規(guī)則體系,以填補(bǔ)法律空白。下文擬基于控制變量的基本思路,探索規(guī)則重構(gòu)中所須堅(jiān)持的理念問題。船舶碰撞事故發(fā)生的原因可能有多種,本文擇其一“因智能系統(tǒng)錯(cuò)誤引發(fā)的船舶碰撞”加以討論,此即定量。船舶碰撞情形、船舶自主水平、自主應(yīng)用階段、系統(tǒng)錯(cuò)誤期間,以及潛在責(zé)任主體與對應(yīng)歸責(zé)原則,此即變量。下文擬聚焦上述變量,分類討論每一變量項(xiàng)下可能的規(guī)制方式。
(一)規(guī)則重構(gòu)中的區(qū)分理念
智能船舶的出現(xiàn)并不意味著傳統(tǒng)有人船完全退出航運(yùn)作業(yè)的舞臺(tái),至少會(huì)存在一個(gè)過渡期間。而就目前的研制現(xiàn)狀來看,此過渡期間預(yù)計(jì)會(huì)持續(xù)較長一段時(shí)間。因此,今后智能船舶發(fā)生碰撞并不單指智能船舶之間發(fā)生碰撞,還會(huì)存在智能船舶與有人船之間的碰撞,而此時(shí)的歸責(zé)模式理論上也應(yīng)有所區(qū)分。前已述及,智能船舶的發(fā)展并非一步到位,其系由低階向高階逐步進(jìn)化的動(dòng)態(tài)發(fā)展過程。因此,不同自主水平的智能船舶,其系統(tǒng)的控制和決定影響亦不同,這也就要求在責(zé)任分?jǐn)偵嫌兴鶇^(qū)別對待。同時(shí),在一個(gè)航次周期,受作業(yè)航區(qū)的外在條件影響,智能船舶的自主能力發(fā)揮也會(huì)有所不同,這進(jìn)而也會(huì)影響最終的責(zé)任承擔(dān)。而就系統(tǒng)本身而言,它在航行前、航行中等階段均存在發(fā)生錯(cuò)誤的可能,這也須成為責(zé)任分配時(shí)的考慮因素之一。此即區(qū)分理念。
1.區(qū)分船舶碰撞情形
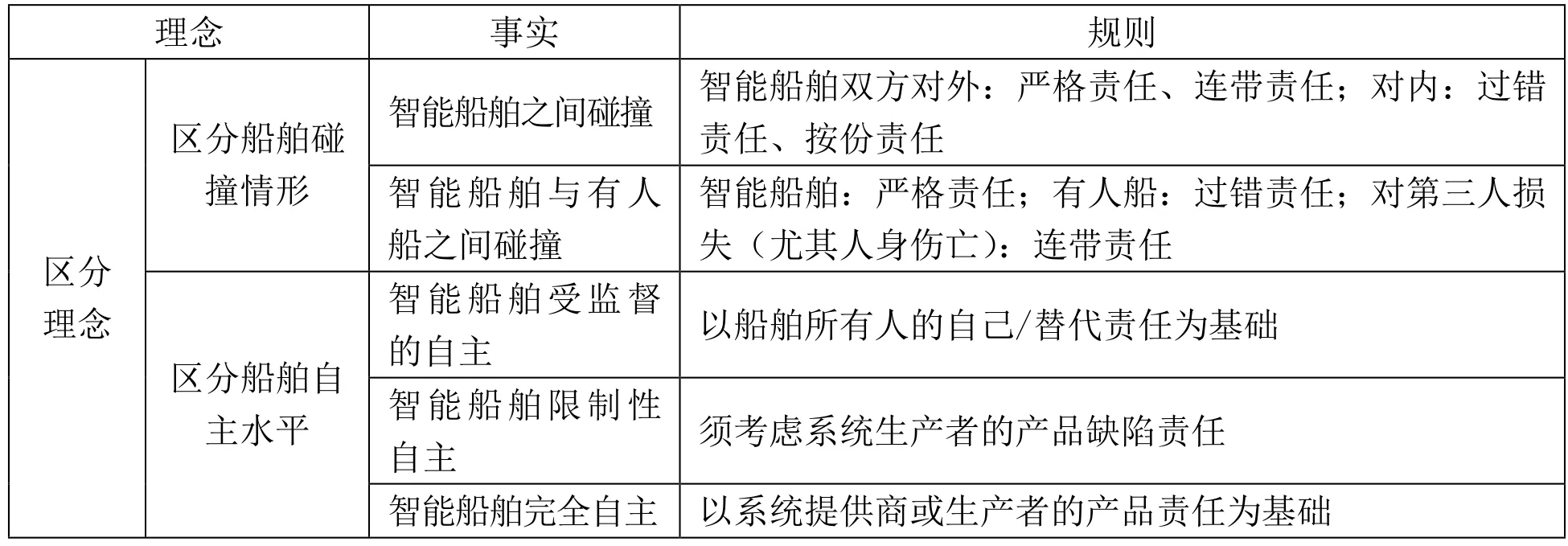
今后及未來較長一段時(shí)間,智能船舶碰撞存在下述兩類情形:一是智能船舶之間的碰撞,二是智能船舶與傳統(tǒng)有人船之間的碰撞。[63]基于前述假定,本文暫不予考慮船舶與碼頭、燈塔、燈船、防波堤或其他固定建筑物之間的碰撞情形,僅考慮船舶與船舶之間的碰撞情形,并在此項(xiàng)下區(qū)分智能船舶與傳統(tǒng)有人船的碰撞情形組合。亦即,本文假定文中的“船舶碰撞”是受《海商法》第八章所調(diào)整的船舶碰撞情形。在前一種情形下,對于第三方的損失,智能船舶雙方均須根據(jù)嚴(yán)格責(zé)任歸責(zé)原則對外承擔(dān)連帶責(zé)任;而對于雙方船舶之間的損失,雙方可根據(jù)過錯(cuò)比例對內(nèi)按份追償。在后一種情形下,智能船舶須依據(jù)嚴(yán)格責(zé)任歸責(zé)原則承擔(dān)責(zé)任,有人船則依據(jù)過錯(cuò)原則承擔(dān)責(zé)任,雙方對第三人的損失尤其是人身傷亡承擔(dān)連帶責(zé)任。[64]參見韓立新、夏文豪:《中國無人船的政策與法律規(guī)則應(yīng)對》,載《海洋法律與政策》2021 年第1 期,第56 頁。
嚴(yán)格責(zé)任的正當(dāng)性基礎(chǔ)在于行為人對危險(xiǎn)源的開啟與擴(kuò)大、對危險(xiǎn)控制的更為可期待性、所得利益的對價(jià)報(bào)償。在智能船舶與有人船發(fā)生碰撞的情形下,基于技術(shù)的黑匣子效應(yīng),智能船舶可以被視為危險(xiǎn)源的開啟或擴(kuò)大一方,故對其適用嚴(yán)格責(zé)任原則。而前已述及,在我國船舶本身并非責(zé)任主體,不能獨(dú)立履行義務(wù)、承擔(dān)責(zé)任。在智能船舶模式下,責(zé)任主體可能有智能系統(tǒng)提供商、遠(yuǎn)程運(yùn)營商、船廠、銷售者、船舶所有人、承運(yùn)人。加入生產(chǎn)者等責(zé)任主體并不意味著豁免船舶所有人、承運(yùn)人的船舶碰撞責(zé)任,而是敦促相關(guān)主體恪盡職守,盡可能規(guī)避技術(shù)“黑匣子”不可逆轉(zhuǎn)性危害,在推進(jìn)技術(shù)發(fā)展與保護(hù)受害者之間尋求一個(gè)最佳平衡點(diǎn)。筆者認(rèn)為,對智能船舶適用嚴(yán)格責(zé)任原則更多地是從責(zé)任體系層面討論的,指向的是智能船舶所有人等的船舶碰撞責(zé)任與智能系統(tǒng)生產(chǎn)者的產(chǎn)品缺陷責(zé)任,即并不意味著全盤革新船舶碰撞傳統(tǒng)的過錯(cuò)責(zé)任認(rèn)定邏輯。質(zhì)言之,這也就要求合理分配智能船舶生產(chǎn)者(包括智能系統(tǒng)提供商等)與智能船舶所有人(包括船舶經(jīng)營人等)之間的責(zé)任。[65]參見曲亞囡、申傲:《海商法視角下對CMI 無人船調(diào)查問卷的思考》,載《海洋開發(fā)與管理》2021 年第4 期,第32 頁。
2.區(qū)分船舶自主水平
前已述及,船舶自主水平存在等級(jí)劃分,從三級(jí)到六級(jí)不等。事實(shí)上,船舶的自主水平大體上均可歸納為三類:一是“受監(jiān)督的自主”(monitored autonomy),這指的是智能系統(tǒng)可以相對獨(dú)立操作船舶的情況,但船員持續(xù)監(jiān)督系統(tǒng)的自動(dòng)化狀態(tài),在系統(tǒng)未能令人滿意地執(zhí)行作業(yè)任務(wù)時(shí),船員被期望且有義務(wù)立即進(jìn)行干預(yù)。亦即,此時(shí)智能系統(tǒng)為船員提供決策支持,但基本上不會(huì)改變船員的角色或責(zé)任。二是“限制性自主”(constrained autonomy),這指的是智能系統(tǒng)獨(dú)立操作船舶,不需要人的監(jiān)督,但當(dāng)系統(tǒng)要求提供協(xié)助時(shí),船員必須隨時(shí)準(zhǔn)備接管作業(yè)職責(zé)。三是“完全自主”(fully autonomy),這意味著智能系統(tǒng)的運(yùn)行完全沒有人的參與,船員不需要隨時(shí)待命。[66]See Henrik Ringbom, Regulating Autonomous Ships-Concepts, Challenges and Precedents, 50 Ocean Development & International Law 141, 146 (2019).在“完全自主”模式下,須特別關(guān)注冗余功能和操作(redundancy functions and operation),為通信丟失或延遲的輔助風(fēng)險(xiǎn)提供解決方案,[67]See Henrik Ringbom, Regulating Autonomous Ships-Concepts, Challenges and Precedents, 50 Ocean Development & International Law 141, 145, 156 (2019).否則會(huì)觸發(fā)相應(yīng)的責(zé)任。
學(xué)者普遍認(rèn)為當(dāng)智能船舶處于“受監(jiān)督的自主”階段時(shí),仍應(yīng)以傳統(tǒng)上人的過錯(cuò)責(zé)任為基礎(chǔ),追究船舶所有人的自己責(zé)任或替代責(zé)任。因?yàn)樵诖顺跫?jí)階段,智能系統(tǒng)尚不具備真正意義上的獨(dú)立性。此時(shí)若存在遠(yuǎn)程控制,則岸基控制中心基于其對船舶的管理、控制與決策行為過錯(cuò)須承擔(dān)相應(yīng)責(zé)任,而船舶所有人亦須因其挑選、監(jiān)督職責(zé)而承擔(dān)相應(yīng)責(zé)任。當(dāng)智能船舶處于“完全自主”的高級(jí)階段時(shí),智能系統(tǒng)真正獲得了獨(dú)立性,故應(yīng)以系統(tǒng)提供商或生產(chǎn)者的產(chǎn)品責(zé)任為基礎(chǔ)。[68]See Michael Boviatsis & George Vlachos, Sustainable Operation of Unmanned Ships under Current International Maritime Law, 14 Sustainability 1, 14 (2022).參見季若望:《智能汽車侵權(quán)的類型化研究——以分級(jí)比例責(zé)任為路徑》,載《南京大學(xué)學(xué)報(bào)(哲學(xué)·人文科學(xué)·社會(huì)科學(xué))》2020 年第2 期,第120 頁。需要指出的是,雖然該文的研究對象是智能汽車,但鑒于智能汽車與智能船舶在系統(tǒng)等方面具有可類比性,故在探討智能船舶碰撞的責(zé)任架構(gòu)時(shí)可參考智能汽車領(lǐng)域的相關(guān)意見,后者的研究成果也相對更為成熟而豐富。
尚存爭議的是,在中間“限制性”自主階段,是僅由船舶所有人、岸基控制中心承擔(dān)責(zé)任,還是須加入系統(tǒng)生產(chǎn)者?亦即,產(chǎn)品責(zé)任是否僅存在于最高一級(jí)自主水平的智能船舶中?在其他級(jí)別的智能船舶中是否也存在產(chǎn)品責(zé)任?對此,有的學(xué)者持肯定意見,主張中間階段也須納入生產(chǎn)者的產(chǎn)品責(zé)任;[69]參見季若望:《智能汽車侵權(quán)的類型化研究——以分級(jí)比例責(zé)任為路徑》,載《南京大學(xué)學(xué)報(bào)(哲學(xué)·人文科學(xué)·社會(huì)科學(xué))》2020 年第2 期,第129 頁。有的學(xué)者則持反對意見,主張此時(shí)仍應(yīng)以船舶所有人、岸基控制中心等操作或監(jiān)督操作者的船舶碰撞責(zé)任為主,而生產(chǎn)者的產(chǎn)品缺陷責(zé)任可忽略不計(jì)。[70]See Michael Boviatsis & George Vlachos, Sustainable Operation of Unmanned Ships under Current International Maritime Law, 14 Sustainability 1, 14 (2022).筆者認(rèn)為,中間階段亦須考慮系統(tǒng)生產(chǎn)者的責(zé)任。因?yàn)榇穗A段人的控制和決定力已經(jīng)大大削弱,系統(tǒng)的作用和影響更居主導(dǎo)地位,生產(chǎn)者須相對應(yīng)地提高自身注意義務(wù),否則就應(yīng)承擔(dān)賠償責(zé)任等不利后果。
3.區(qū)分自主應(yīng)用階段
智能船舶的自主應(yīng)用階段就涉及“周期性無人”(periodically unmanned)以及自主與非自主相互切換的問題。在單個(gè)航次中,智能船舶的自主水平可能有所不同,因?yàn)樗赡芨鶕?jù)航行區(qū)域(sailing area)、交通狀況(traffic conditions)等而改變。[71]See Henrik Ringbom, Regulating Autonomous Ships-Concepts, Challenges and Precedents, 50 Ocean Development & International Law 141, 143, 156 (2019).智能系統(tǒng)的自主性水平系一個(gè)動(dòng)態(tài)概念,它會(huì)隨著客觀外在環(huán)境的變化而上下浮動(dòng),而客觀外在環(huán)境則包括所在航區(qū)的地理、氣象和交通條件等。譬如,在所在航區(qū)系公海等環(huán)境相對單純的區(qū)域時(shí),智能船舶可能有條件采取更高標(biāo)準(zhǔn)的自主水平;而所在航區(qū)系港口區(qū)域等環(huán)境相對復(fù)雜的水域時(shí),智能船舶的既定自主水平亦會(huì)受限,往往仍有賴于人的能動(dòng)介入。[72]參見王國華、孫譽(yù)清:《21 世紀(jì)海盜:無人船海上航行安全的法律滯礙》,載《中國海商法研究》2018 年第4 期,第103 頁。
基于上述客觀實(shí)際,筆者建議在因系統(tǒng)錯(cuò)誤引發(fā)的船舶碰撞責(zé)任體系中引入?yún)^(qū)段責(zé)任。申言之,在智能船舶采高標(biāo)準(zhǔn)自主水平的航行區(qū)段,在責(zé)任分?jǐn)偵弦艘韵到y(tǒng)生產(chǎn)者的產(chǎn)品缺陷責(zé)任為主,以船舶所有人等的船舶碰撞責(zé)任為輔;在智能船舶采低標(biāo)準(zhǔn)自主水平的航行區(qū)段,在責(zé)任分?jǐn)偵弦艘源八腥说鹊拇芭鲎藏?zé)任為主,以系統(tǒng)生產(chǎn)者的產(chǎn)品缺陷責(zé)任為輔;在特殊情形下無法判斷或證實(shí)該區(qū)段的自主應(yīng)用水平,則應(yīng)基于平衡鼓勵(lì)技術(shù)發(fā)展與受害者利益保護(hù)的總價(jià)值目標(biāo),平均分配生產(chǎn)者和船舶所有人等之間的責(zé)任,并在個(gè)案中利用公平原則修正此平均責(zé)任配置的基本假定,同時(shí)可適當(dāng)降低相關(guān)構(gòu)成要件的認(rèn)定門檻。
4.區(qū)分系統(tǒng)錯(cuò)誤期間
智能系統(tǒng)的錯(cuò)誤可能發(fā)生在船舶航運(yùn)作業(yè)之前,也可能發(fā)生在船舶航運(yùn)作業(yè)之中。前一情形又可分為兩類:一類是系統(tǒng)本身在出廠時(shí)就存在故障等質(zhì)量缺陷問題,另一類則是系統(tǒng)本身是滿足質(zhì)量要求的,但在安裝到船舶上、與船舶本體相連接時(shí)出現(xiàn)的“適應(yīng)性問題”(fit for purpose)。針對前一類,因?qū)儆谙到y(tǒng)的固有缺陷而使智能船舶作出錯(cuò)誤行動(dòng)造成碰撞事故,故當(dāng)然可以追究系統(tǒng)生產(chǎn)者的產(chǎn)品責(zé)任。[73]參見王國華、孫譽(yù)清:《無人船碰撞相關(guān)的責(zé)任》,載《上海海事大學(xué)學(xué)報(bào)》2019 年第2 期,第123-124 頁。針對后一類,尤其當(dāng)系統(tǒng)生產(chǎn)商與船舶本體生產(chǎn)商分屬不同主體時(shí),由誰來對系統(tǒng)錯(cuò)誤負(fù)責(zé),目前尚存一定的爭議。一般而言,由系統(tǒng)生產(chǎn)者承擔(dān)此時(shí)的產(chǎn)品責(zé)任更具合理性。[74]參見范曉波、陳怡潔:《船舶無人化趨勢下AI 航行系統(tǒng)的責(zé)任探析》,載《中國海商法研究》2021 年第4 期,第43 頁。因?yàn)楫?dāng)智能船舶系統(tǒng)與本體可分時(shí),系統(tǒng)生產(chǎn)者對系統(tǒng)的調(diào)試(包括與船舶本體連接時(shí)的“適應(yīng)性”調(diào)試)更具有期待可能性,也是其應(yīng)當(dāng)履行的義務(wù)內(nèi)容之一。而對純粹的船舶本體生產(chǎn)者而言,至少在現(xiàn)階段,我們無法苛求其能夠預(yù)測到未來會(huì)被配置上系統(tǒng)以及何種自主水平的系統(tǒng)。他們不具有先驗(yàn)性能力,故不宜由其為此系統(tǒng)錯(cuò)誤負(fù)責(zé)。
而在后一情形下,系統(tǒng)錯(cuò)誤系在使用期間產(chǎn)生的。以遠(yuǎn)程遙控為例,此時(shí)若岸基操控人員有能力及時(shí)修復(fù)該系統(tǒng)錯(cuò)誤而未修復(fù)或遲延修復(fù),則岸基控制中心須承擔(dān)過錯(cuò)責(zé)任,船舶所有人對此負(fù)相應(yīng)的替代責(zé)任。若岸基操控人員因個(gè)人操作不當(dāng)而引起系統(tǒng)失靈,則岸基控制中心亦須承擔(dān)過錯(cuò)責(zé)任,船舶所有人對此負(fù)相應(yīng)的替代責(zé)任。若系統(tǒng)生產(chǎn)者未及時(shí)更新修補(bǔ)系統(tǒng)自身漏洞而造成系統(tǒng)的錯(cuò)誤決策,則生產(chǎn)者亦須承擔(dān)相應(yīng)的責(zé)任。[75]參見王國華、孫譽(yù)清:《無人貨物運(yùn)輸船的法律沖突及協(xié)調(diào)》,載《中國航海》2019 年第1 期,第124頁。系統(tǒng)生產(chǎn)者的義務(wù)并非在研制完成后即告終止,其還負(fù)有定期維護(hù)、升級(jí)、更新系統(tǒng)的動(dòng)態(tài)義務(wù),類似于債法上的后合同義務(wù),不履行此義務(wù)則會(huì)觸發(fā)上述責(zé)任。
(二)規(guī)則重構(gòu)中的并行理念
前已述及,針對智能船舶因系統(tǒng)錯(cuò)誤引發(fā)的碰撞責(zé)任,可能存在兩種規(guī)制徑路:一是船舶碰撞責(zé)任,二是產(chǎn)品缺陷責(zé)任。在我國國內(nèi)法層面,船舶碰撞責(zé)任的承擔(dān)依據(jù)主要是《海商法》的相關(guān)規(guī)定,而產(chǎn)品缺陷責(zé)任除了在《民法典》“產(chǎn)品責(zé)任”一章中有所規(guī)制外,其承擔(dān)依據(jù)主要是《產(chǎn)品質(zhì)量法》的相關(guān)規(guī)定。事實(shí)上,《海商法》與《產(chǎn)品質(zhì)量法》都屬于特殊領(lǐng)域和對象的侵權(quán)行為法,二者之間本身不存在孰為一般孰為特殊、孰為上位孰為下位的關(guān)系,而應(yīng)當(dāng)一并援用,共同追究相關(guān)主體的對應(yīng)責(zé)任。再者,責(zé)任主體的并行并不意味著歸責(zé)原則的同一化,原則上還應(yīng)遵循各自應(yīng)然的歸責(zé)原則框架,兼采嚴(yán)格責(zé)任與過錯(cuò)(包括過錯(cuò)推定)責(zé)任歸責(zé)原則。此即并行理念。
1.各方主體責(zé)任的并行
事實(shí)上,因智能系統(tǒng)錯(cuò)誤引發(fā)的船舶碰撞,與傳統(tǒng)意義上由船舶的零部件、硬件設(shè)備等質(zhì)量缺陷導(dǎo)致的碰撞,總體上殊途同歸。船上任何部件的質(zhì)量缺陷造成的損失,可以歸入產(chǎn)品缺陷項(xiàng)下?lián)p害賠償責(zé)任的調(diào)整范疇,但其法律效果僅是將產(chǎn)品生產(chǎn)者或銷售者作為共同侵權(quán)人增加進(jìn)來,而并不能豁免船舶所有人、經(jīng)營人、管理人等的碰撞法律責(zé)任。[76]參見王欣、初北平:《研發(fā)試驗(yàn)階段的無人船舶所面臨的法律障礙及應(yīng)對》,載《中國海商法研究》2017年第3 期,第65 頁。當(dāng)前正處于智能船舶研制初期,此階段充滿了技術(shù)的不確定性及其帶來的風(fēng)險(xiǎn)挑戰(zhàn),為了避免技術(shù)的“潘多拉魔盒”與“黑匣子”威脅,織密責(zé)任主體體系實(shí)屬必要。
再者,一般侵權(quán)責(zé)任要求侵權(quán)行為、損害后果、因果關(guān)系、主觀過錯(cuò)四要件,且在因果關(guān)系上采“有無”式“定性”標(biāo)準(zhǔn)。而當(dāng)智能系統(tǒng)介入以后,侵權(quán)責(zé)任中的因果關(guān)系構(gòu)成要件認(rèn)定受到?jīng)_擊,不再是簡單的“全有或全無”的二元問題,而是轉(zhuǎn)化為“占比多少”的多元問題,從“定性”問題發(fā)展為“定量”問題。[77]參見季若望:《智能汽車侵權(quán)的類型化研究——以分級(jí)比例責(zé)任為路徑》,載《南京大學(xué)學(xué)報(bào)(哲學(xué)·人文科學(xué)·社會(huì)科學(xué))》2020 年第2 期,第122 頁。這就要求具體問題具體分析,綜合評測各方主體在智能船舶航運(yùn)作業(yè)中所起的作用,以及在碰撞事故中可歸因性的強(qiáng)弱。各方主體整體上形成責(zé)任群,這也是在平衡鼓勵(lì)科技創(chuàng)新與保護(hù)個(gè)體利益價(jià)值取向下的應(yīng)有之義。
就船舶所有人而言,他的義務(wù)及責(zé)任期間覆蓋系統(tǒng)從被挑選到實(shí)際作業(yè)再到檢查與維護(hù)的全過程,義務(wù)及責(zé)任強(qiáng)度較高。由船舶所有人繼續(xù)承受高強(qiáng)度的義務(wù)與責(zé)任更具有時(shí)效性,因?yàn)槿魏螐氖挛kU(xiǎn)活動(dòng)的人都應(yīng)自負(fù)其責(zé),且船東互保協(xié)會(huì)的保險(xiǎn)制度能夠有效確保第三方因碰撞造成的損失得到適當(dāng)賠償。[78]See Damilola Osinuga, Unmanned Ships: Coping in the Murky Waters of Traditional Maritime Law, 174 Poredbeno Pomorsko Pravo 75, 95 (2020).而就系統(tǒng)生產(chǎn)者而言,他的義務(wù)及責(zé)任期間則不僅涵蓋前期的研制階段,還應(yīng)涵蓋后期的持續(xù)性更新階段。
2.不同歸責(zé)原則的并行
在歸責(zé)原則上,船舶碰撞責(zé)任一般以過錯(cuò)責(zé)任為歸責(zé)原則,且在特定情形下船舶利益相關(guān)方可依法定程序行使海事賠償責(zé)任限制的抗辯權(quán);而產(chǎn)品缺陷責(zé)任遵循嚴(yán)格責(zé)任歸責(zé)原則,且不存在賠償責(zé)任限制的抗辯權(quán)得喪變更問題。因此,在涉及多個(gè)主體的賠償責(zé)任追究與分?jǐn)倳r(shí),應(yīng)明晰規(guī)制徑路,進(jìn)而采用對應(yīng)的歸責(zé)原則。
若以船舶碰撞責(zé)任論處,則會(huì)涉及海事賠償責(zé)任限制的喪失問題:若“損失是由于責(zé)任人的故意或者明知可能造成損失而輕率地作為或者不作為造成的”[79]《海商法》第209 條。,則船舶所有人的抗辯權(quán)行使將受阻,即無權(quán)享受總體責(zé)任限制的優(yōu)待。在智能船舶實(shí)例中,上述直接故意和間接故意型過錯(cuò)的外在行為表現(xiàn)包括:(1)船舶所有人不遵守主管機(jī)關(guān)在可航區(qū)域范圍上所作的明確限制性規(guī)定;(2)在航行作業(yè)之前或當(dāng)時(shí),明知系統(tǒng)在技術(shù)上尚不穩(wěn)定、存在決策失誤的較高可能性而仍輕率地依托系統(tǒng)的自主執(zhí)行;(3)在航行作業(yè)之前和過程中沒有制定并實(shí)施實(shí)時(shí)監(jiān)督乃至緊急干預(yù)的應(yīng)急預(yù)案,對碰撞事故持漠視態(tài)度;(4)在碰撞實(shí)際發(fā)生時(shí),并未采取必要的人為介入性補(bǔ)救措施而放任損害的擴(kuò)大。[80]參見王欣、初北平:《研發(fā)試驗(yàn)階段的無人船舶所面臨的法律障礙及應(yīng)對》,載《中國海商法研究》2017年第3 期,第65 頁。總體上,宜適當(dāng)降低海事賠償責(zé)任限制的喪失門檻,以此倒逼航運(yùn)公司提高勤勉與注意義務(wù),預(yù)防與規(guī)避智能系統(tǒng)的未知威脅。
結(jié) 論
智能船舶在航行效率、安全、成本、環(huán)保、工作環(huán)境等方面具有顯著優(yōu)勢,這使得各國紛紛加快研制智能船舶的步伐,計(jì)劃未來逐步過渡到完全無人駕駛船舶的高階狀態(tài)。科學(xué)技術(shù)的快速更新迭代與法律規(guī)則的緩慢修訂調(diào)整,二者之間的潛在矛盾影響了智能船舶的穩(wěn)定發(fā)展。可喜的是,由國際海事組織牽頭,各國已著手推進(jìn)智能船舶的規(guī)范化工作,目前也已初具雛形。在智能船舶法律屬性的本源性問題上,智能船舶具有形式上的船舶地位,但尚不具有實(shí)質(zhì)上的船舶地位;智能船舶整體及其系統(tǒng)部分本身均構(gòu)成產(chǎn)品。
智能船舶因系統(tǒng)錯(cuò)誤引發(fā)的碰撞責(zé)任,其規(guī)則體系構(gòu)想可歸納為下表二。
需要指出的是,本文僅對智能船舶因系統(tǒng)錯(cuò)誤引發(fā)的碰撞責(zé)任問題作了分析研討。對于包括第三人原因在內(nèi)的其他致?lián)p原因下碰撞責(zé)任承擔(dān),以及智能船舶的通過制度、承運(yùn)人的航行過失免責(zé)、新型海盜行為規(guī)制等,這些前沿問題尚有待進(jìn)一步的研究空間。
附錄一
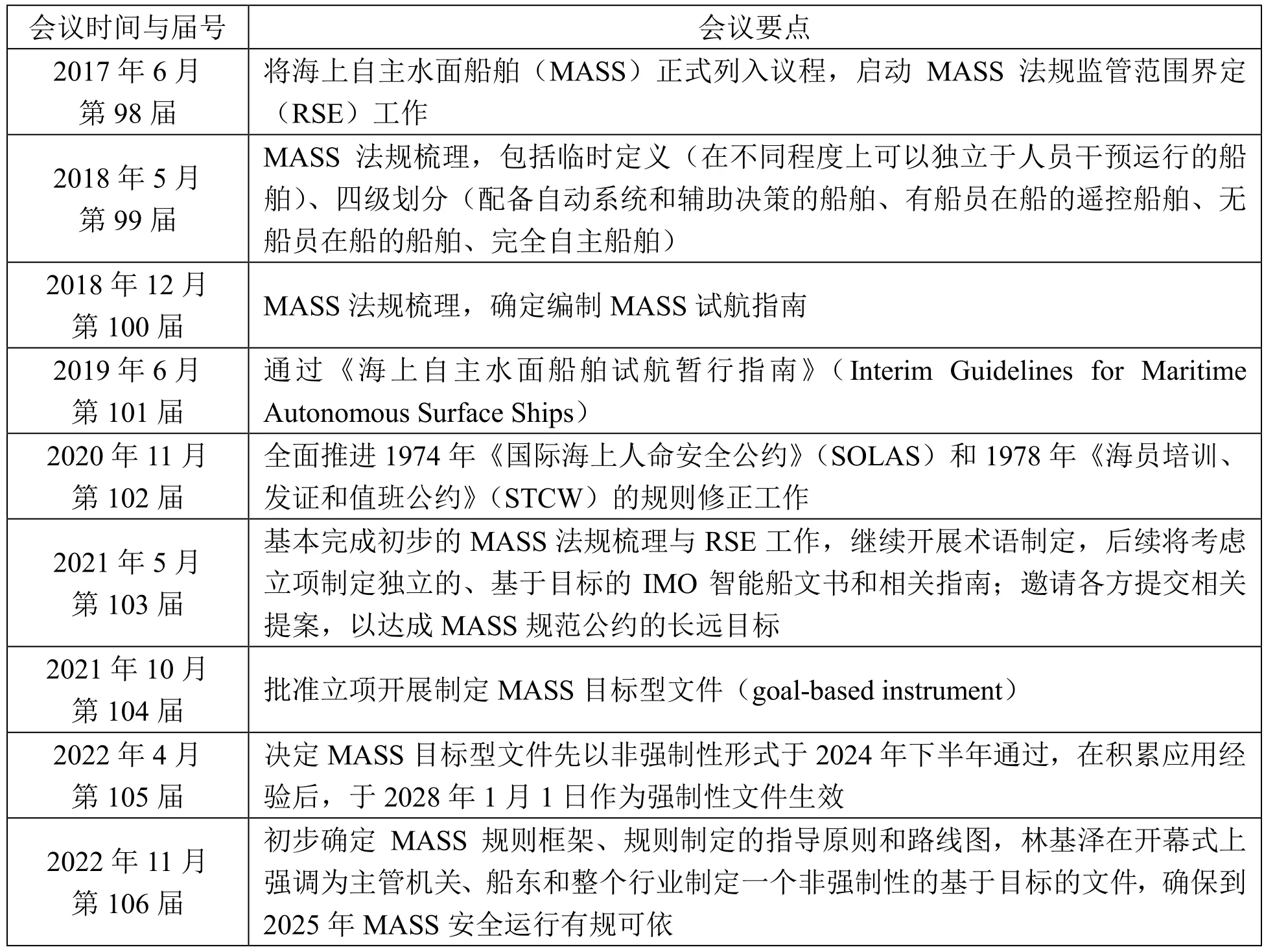
表一 國際海事組織海上安全委員會(huì)在推進(jìn)智能船舶監(jiān)管規(guī)范化上的努力[81] 會(huì)議要點(diǎn)摘自中國船級(jí)社發(fā)布的歷屆會(huì)議要點(diǎn)快報(bào),參見中國船級(jí)社官網(wǎng),https://www.ccs.org.cn/ccswz/。在用語上,因海上安全委員會(huì)采用“海上水面自主船舶”(MASS)的表達(dá),故表一在梳理會(huì)議要點(diǎn)時(shí)沿用此表達(dá)方式。
附錄二
附錄三
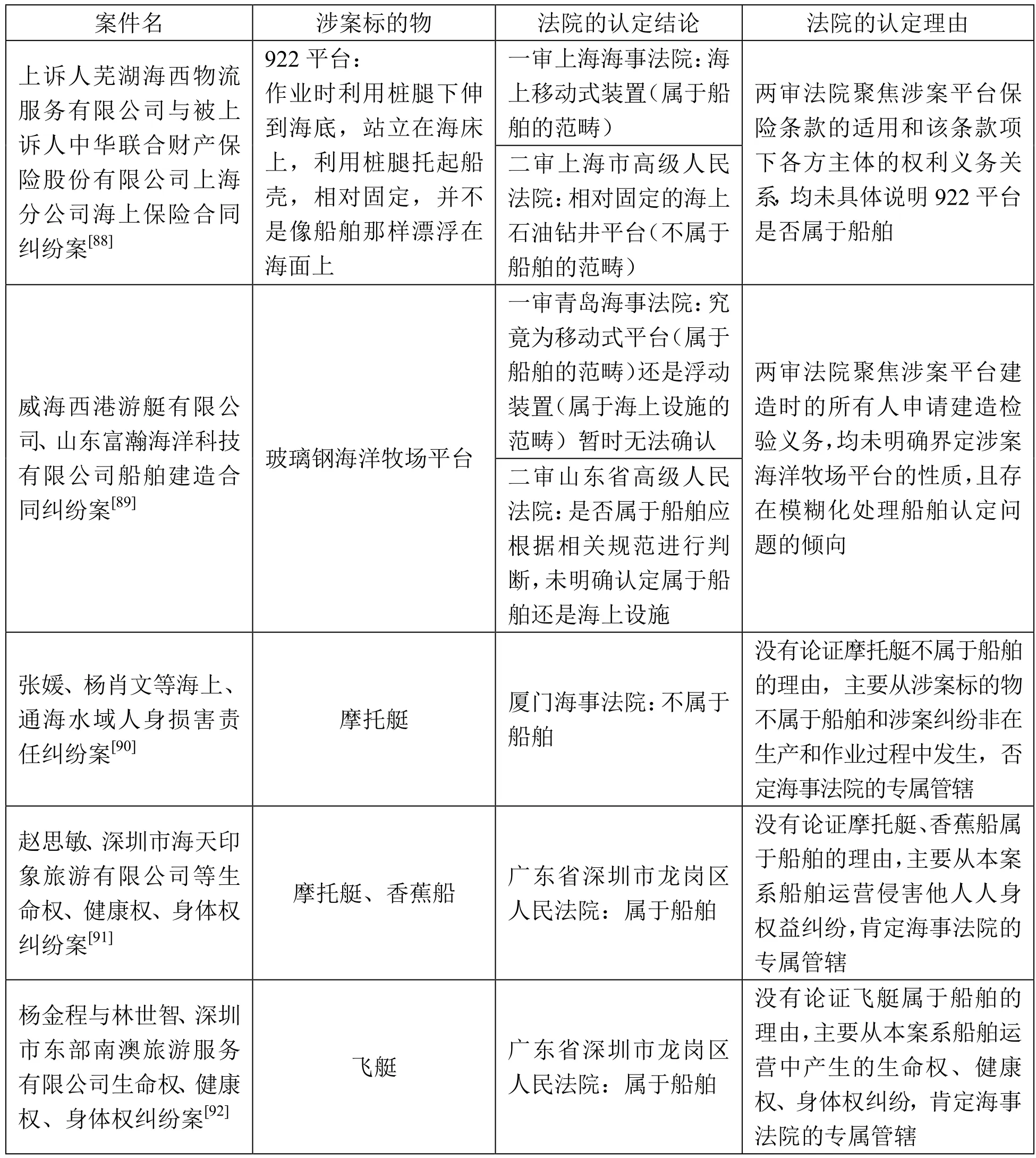
表三 我國2018-2022 年期間涉船舶界定的案例
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
