基于分布式振動(dòng)傳感的智能光纖監(jiān)測(cè)方案設(shè)計(jì)
2024-01-12 04:39:44涂超王繼儀張麗文
微型電腦應(yīng)用 2023年12期
涂超, 王繼儀, 張麗文
(國(guó)網(wǎng)甘肅省電力公司酒泉供電公司, 甘肅, 酒泉 735000)
0 引言
大型供電系統(tǒng)[1]的安全運(yùn)行對(duì)社會(huì)發(fā)展起到重要推動(dòng)作用。然而,由于電纜故障[2]導(dǎo)致電力生產(chǎn)損失已成為該行業(yè)面臨的一個(gè)重要問(wèn)題。其中,有些故障主要由于在安裝階段電纜可能出現(xiàn)過(guò)度彎曲或過(guò)度拉伸時(shí)遭到損壞造成。此外,還有一些故障主要在后期運(yùn)行時(shí)由于人為或自然災(zāi)害導(dǎo)致電纜受沖擊,從而造成一定量機(jī)械損傷。為此,無(wú)論從經(jīng)濟(jì)角度,還是電力運(yùn)行安全保障要求等方面,研究電纜安防與保護(hù)方案已迫在眉睫。
隨著網(wǎng)絡(luò)、大數(shù)據(jù)、物聯(lián)網(wǎng)、通信等技術(shù)[3-4]不斷發(fā)展,可建立智能電纜檢測(cè)系統(tǒng),從而大幅度提高電纜系統(tǒng)的可靠性。其中,一種主要思路是通過(guò)模型方法實(shí)現(xiàn)電纜故障檢測(cè)。文獻(xiàn)[5]提出了基于不充分知識(shí)下的電纜故障檢測(cè)與診斷方法。該方法分別從電纜類型、電纜結(jié)構(gòu)、電纜參數(shù)、傳播特性等方面構(gòu)建電纜分布結(jié)構(gòu)模型,從而實(shí)現(xiàn)電纜故障檢測(cè)與診斷。文獻(xiàn)[6]提出了基于數(shù)據(jù)驅(qū)動(dòng)及無(wú)監(jiān)督分析的電纜故障檢測(cè)與診斷方法。該方法通過(guò)重采樣采集電纜工作原始數(shù)據(jù),利用數(shù)據(jù)驅(qū)動(dòng)技術(shù)構(gòu)建特征參數(shù)儲(chǔ)備池,計(jì)算原數(shù)據(jù)的特征貢獻(xiàn)率,從而診斷電纜故障類型。然而,模型方法存在計(jì)算復(fù)雜,復(fù)雜條件下如海底、深山等復(fù)雜地形適用性較低。隨著分布式振動(dòng)傳感器(DVS)的不斷發(fā)展,有大量學(xué)者將其引入電纜監(jiān)測(cè)領(lǐng)域。文獻(xiàn)[7]基于壓電傳感器研制了無(wú)線分布式的電纜外力擾動(dòng)智能傳感器。同時(shí),對(duì)該傳感器數(shù)據(jù)處理、低功耗電源管理、取能單元以及物聯(lián)網(wǎng)通信方法進(jìn)行了分析。文獻(xiàn)[8]提出了一種基于相位敏感的光時(shí)域反射儀技術(shù)的光纖分布式振動(dòng)傳感器系統(tǒng)。基于DVS的電纜監(jiān)測(cè)方案可靠性高,然而設(shè)計(jì)復(fù)雜,且成本較高。
為了改善傳統(tǒng)DVS系統(tǒng)設(shè)計(jì)復(fù)雜以及成本較高的缺陷,本文設(shè)計(jì)了基于瑞利散射的DVS評(píng)估方案,并使用光纖干涉儀監(jiān)測(cè)嵌入式光纖的三芯交流電纜的機(jī)械應(yīng)力,為智能光纖安防與監(jiān)測(cè)提供一定借鑒思路。
1 理論分析
為了評(píng)估沿光纖方向的應(yīng)變分布,本文使用基于相位的光時(shí)域反射技術(shù)[9-10](φ-OTDR)分析來(lái)自光纖截面的后向散射光的相位,并用來(lái)測(cè)量光纖任何給定截面處的應(yīng)變程度。如圖1所示,為了評(píng)估長(zhǎng)度為L(zhǎng)的光纖截面上的應(yīng)變程度,可將光脈沖發(fā)射到光纖中,并測(cè)量該截面兩端后向散射瑞利光之間的相位差。對(duì)于任意給定電纜,相位差可計(jì)算如下:
(1)

圖1 基本電纜組成示意圖
式中,φA和φB為來(lái)自兩端的后向散射光的相位,n為光纖的有效折射率,λ為光的波長(zhǎng),φ為隨機(jī)相位。當(dāng)電纜彎曲時(shí),該段光纖兩端之間的距離根據(jù)彎曲力矩增加或減少,此時(shí)光纖同一截面上的相位差計(jì)算如下:
(2)
式中,ΔL為光纖長(zhǎng)度的變化,加號(hào)和減號(hào)分別對(duì)應(yīng)于拉伸和壓縮下的變量。通過(guò)比較電纜受到不同偏轉(zhuǎn)前后的相位差,可以確定光纖長(zhǎng)度的變化,從而確定電纜的應(yīng)變。通過(guò)連續(xù)監(jiān)測(cè)光纖每個(gè)單獨(dú)部分的后向散射光相位變化,可以繪制電纜沿線的動(dòng)態(tài)應(yīng)變變化圖。
2 力學(xué)分析
圖1為某供電電纜示意圖。其由3根導(dǎo)線和1根光纖纏繞,并由金屬鎧裝和1根外部保護(hù)套組成。在電纜的應(yīng)變分析中,需要在計(jì)算中考慮電纜內(nèi)光纖束的無(wú)應(yīng)變運(yùn)行窗口(中性層),以及電纜內(nèi)元件的螺旋排列對(duì)應(yīng)變的影響。需注意,無(wú)應(yīng)變運(yùn)行窗口指電纜伸長(zhǎng)或牽引對(duì)電纜內(nèi)的光纖幾乎沒(méi)有影響,主要通過(guò)纏繞電纜中心元件外被層的光纖松套管來(lái)實(shí)現(xiàn)。然而,無(wú)應(yīng)變窗口若因電纜顯著變形而耗盡,電纜內(nèi)的光纖將承受電纜總應(yīng)變的一小部分。此外,電纜上的實(shí)際應(yīng)變與光纖所承受的應(yīng)變程度之間的差異需要通過(guò)試驗(yàn)確定。
電纜內(nèi)部光纖束的螺旋幾何結(jié)構(gòu)也會(huì)影響應(yīng)變測(cè)量結(jié)果。如圖2所示,施加在光纖上的應(yīng)變程度取決于電纜彎曲和光纖束相對(duì)于電纜中性層的位置。由于幾何形狀限制,光纖受到拉力和壓縮應(yīng)變。光纖無(wú)限小長(zhǎng)度dx上的應(yīng)變程度計(jì)算如下:

圖2 基本電纜組成示意圖
εfibre=εT+εb
(3)
式中,εT和εb分別為拉伸應(yīng)變和壓縮應(yīng)變。由于DVS系統(tǒng)測(cè)量光纖的凈伸長(zhǎng)ΔL在預(yù)先確定的標(biāo)距長(zhǎng)度L上,因此可通過(guò)對(duì)標(biāo)距長(zhǎng)度上的應(yīng)變進(jìn)行積分從而計(jì)算光纖伸長(zhǎng)率:

(4)
式中,x0為傳感光纖上的任何位置。帶有螺旋纏繞管組件的電纜在其主加載方向具有較高的軸向強(qiáng)度,且在其他加載方向具有相當(dāng)大的靈活性。當(dāng)此類電纜發(fā)生偏轉(zhuǎn)時(shí),由于正常荷載導(dǎo)致電纜變形,電纜內(nèi)的子部件將遭受較高的壓縮應(yīng)變,同時(shí)由于沒(méi)有施加縱向力,因此會(huì)承受較小的拉伸應(yīng)變。綜上,為了研究由于電纜偏轉(zhuǎn)而在光纖上產(chǎn)生的應(yīng)變和應(yīng)力,可以忽略光纖上的拉伸應(yīng)變。
為了測(cè)量偏轉(zhuǎn)電纜內(nèi)光纖的壓縮應(yīng)變?chǔ)舃,首先需要計(jì)算電纜的曲率。曲率可以通過(guò)將二階多項(xiàng)式擬合到測(cè)量的電纜撓度δ計(jì)算,且其端點(diǎn)保持在零撓度。因此,曲率κ可根據(jù)撓度計(jì)算如下:
(5)
式中,δ′和δ″為撓度δ的一階和二階導(dǎo)數(shù)。電纜的曲率可用于計(jì)算距離電纜主軸dm的光纖上的最大壓縮應(yīng)變,計(jì)算公式如下:
εb,max=κdcosθ
(6)
式中,θ電纜內(nèi)子部件的螺旋角。光纖上的凈應(yīng)變水平取決于光纖相對(duì)于電纜中性面的位置,具體如圖2所示。應(yīng)變水平變化范圍為εb,max(頂端承受拉伸的光纖)到-εb,max(底部承受壓縮的光纖)。因此,由于標(biāo)距長(zhǎng)度L上的壓縮應(yīng)變而產(chǎn)生的總伸長(zhǎng)率由式(7)給出:
(7)
式中,Llay為電纜的捻距,L為DVS系統(tǒng)的標(biāo)距長(zhǎng)度。式(7)表明,光纖伸長(zhǎng)取決于傳感系統(tǒng)的標(biāo)距長(zhǎng)度和電纜的捻距,并且沿傳感光纖周期性的變化。如果DVS系統(tǒng)的標(biāo)距長(zhǎng)度等于電纜的捻距(Llay=L),則壓縮應(yīng)變產(chǎn)生的伸長(zhǎng)率將為0。分析原因:受拉光纖截面的正應(yīng)變將被下一段受壓光纖的負(fù)應(yīng)變抵消。對(duì)于標(biāo)距長(zhǎng)度小于電纜捻距的DVS系統(tǒng),伸長(zhǎng)率為傳感系統(tǒng)標(biāo)距長(zhǎng)度上的應(yīng)變總和。
3 試驗(yàn)與分析
3.1 試驗(yàn)裝置
圖3為提出的用于評(píng)估DVS監(jiān)測(cè)電力電纜動(dòng)態(tài)應(yīng)變和沖擊能力的試驗(yàn)裝置。該試驗(yàn)裝置由2個(gè)主要部分組成:光纖詢問(wèn)器和液壓試驗(yàn)臺(tái)。
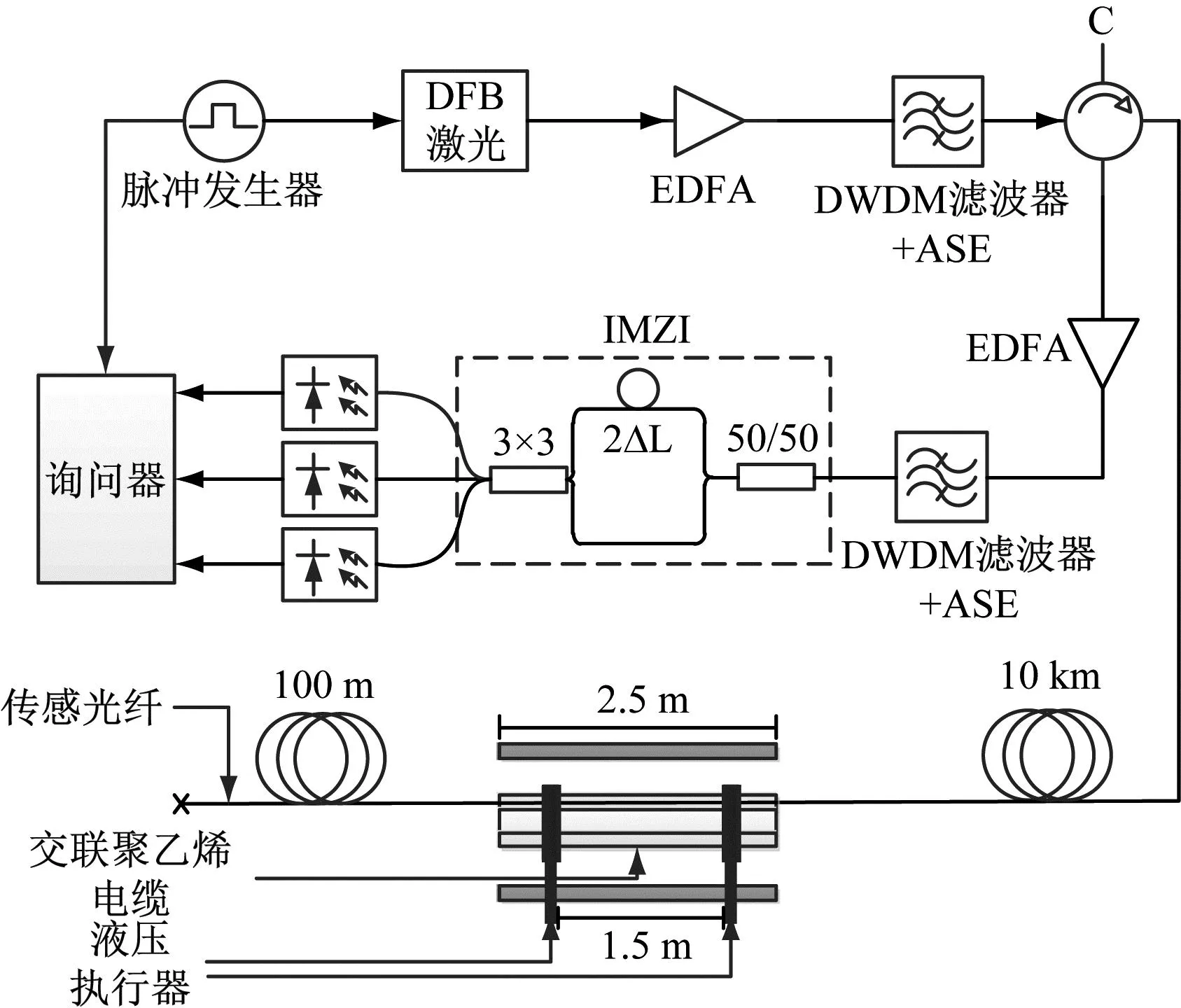
圖3 試驗(yàn)裝置
3.1.1 光纖詢問(wèn)器
為了測(cè)試電纜內(nèi)的光纖,本試驗(yàn)使用基于φ-OTDR的DVS傳感單元。圖3為詢問(wèn)器示意圖。該裝置對(duì)1550 nm分布反饋式(DFB)激光器進(jìn)行調(diào)制,產(chǎn)生峰值功率為20 mW的8 ns光脈沖。光脈沖由摻鉺光纖放大器(EDFA)放大,從而將峰值功率提高到1W。放大的脈沖通過(guò)密集波分復(fù)用(DWDM)濾波器過(guò)濾并由自發(fā)輻射(ASE)放大。放大的脈沖通過(guò)環(huán)行器C發(fā)射到傳感光纖。
來(lái)自傳感光纖的后向散射光由同一環(huán)行器收集,并由第二個(gè)增益為25 dB的EDFA放大。放大后的后向散射光通過(guò)另一個(gè)DWDM濾波器以消除ASE噪聲,并發(fā)射到非平衡馬赫-曾德?tīng)柛缮鎯x(IMZI),并從后向散射光中提取相位信息。IMZI的參數(shù)設(shè)置為2 m,從而實(shí)現(xiàn)1 m空間分辨率;輸出端使用對(duì)稱的3×3耦合器,從而避免相位信號(hào)衰落。
進(jìn)一步,IMZI的3個(gè)輸出臂分別連接到3個(gè)光接收器并用500 MHz/s的等效數(shù)據(jù)采集卡進(jìn)行采樣。接著對(duì)采集的數(shù)據(jù)進(jìn)行處理,從而提取沿傳感光纖的相位信息。為了消除系統(tǒng)中噪聲,每個(gè)采樣點(diǎn)的相位信息由通帶為0.1 Hz至500 Hz的帶通濾波器(BPF)進(jìn)行數(shù)字濾波。
3.1.2 液壓試驗(yàn)臺(tái)
根據(jù)典型四點(diǎn)彎曲試驗(yàn)過(guò)程,液壓試驗(yàn)臺(tái)由1個(gè)2.5 m鋼框架和2個(gè)液壓執(zhí)行器組成,用于對(duì)電纜施加力(見(jiàn)圖4)。試驗(yàn)臺(tái)設(shè)計(jì)用于在2個(gè)相距2.5 m的點(diǎn)處支撐電纜,允許電纜自由轉(zhuǎn)動(dòng)和平移滑動(dòng)。2個(gè)液壓執(zhí)行器安裝在距離試驗(yàn)臺(tái)兩端625 mm處。在本文使用1根3.5 m長(zhǎng)的三相33 kV鎧裝電纜作為測(cè)試對(duì)象。其中,電纜線芯捻距為1.6 m,其子組件的螺旋角為16°。

圖4 液壓試驗(yàn)臺(tái)
3.2 試驗(yàn)過(guò)程
本試驗(yàn)的目的是確定DVS系統(tǒng)測(cè)量循環(huán)荷載和電纜突然沖擊能力。
對(duì)于循環(huán)荷載試驗(yàn),液壓執(zhí)行器周期性地偏轉(zhuǎn)電纜,在中點(diǎn)附近有2個(gè)移動(dòng)距離,分別為±100 mm和±150 mm。同時(shí),通過(guò)測(cè)量電纜五點(diǎn)處的位移來(lái)評(píng)估電纜撓度,并最終求解電纜曲率。對(duì)于沖擊試驗(yàn),使用4 kg楔形鋼塊從114 cm的高度落在測(cè)試電纜的中間。
試驗(yàn)過(guò)程中,循環(huán)荷載和沖擊試驗(yàn)的脈沖重復(fù)周期均設(shè)置為900 μs,循環(huán)加載的數(shù)據(jù)采集時(shí)間為60 s,沖擊試驗(yàn)的數(shù)據(jù)采集時(shí)間為20 s。
3.3 結(jié)果與分析
3.3.1 循環(huán)荷載結(jié)果與分析
圖5為傳感光纖上固定點(diǎn)的應(yīng)變隨時(shí)間的變化曲線。其中,圖5(a)和圖5(b)分別為±100 mm和±150 mm撓度范圍內(nèi)的應(yīng)變變化曲線。圓圈代表DVS系統(tǒng)在傳感纖維上的一個(gè)點(diǎn)上測(cè)量的應(yīng)變率,而虛線代表圍繞傳感纖維的松套管為液壓執(zhí)行器的理想周期運(yùn)動(dòng)所測(cè)得的應(yīng)變。

(a) ±100 mm撓度范圍內(nèi)應(yīng)變變化曲線
從圖5可以看出,傳感光纖上單個(gè)點(diǎn)的感應(yīng)應(yīng)變頻率和相位與液壓執(zhí)行器偏轉(zhuǎn)范圍內(nèi)的頻率和相位相匹配。對(duì)于±100 mm和±150 mm的撓度,子部件的最大應(yīng)變分別為6.88 mε和10.65 mε,而DVS系統(tǒng)測(cè)量的應(yīng)變偏移分別為232 με和415 με。分析造成差異的原因:由光纖和電纜其余部分之間的弱機(jī)械耦合造成,如松套管、鎧裝層、導(dǎo)管之間震動(dòng)等。
3.3.2 沖擊試驗(yàn)結(jié)果與分析
圖6為沖擊試驗(yàn)時(shí)撞擊點(diǎn)處的2D橫截面隨時(shí)間的變化曲線。其中,豎直虛線表示該時(shí)間處產(chǎn)生沖擊;曲線中實(shí)線表示嵌入電纜中的光纖在沖擊點(diǎn)處經(jīng)歷的應(yīng)變,主要由高頻振動(dòng)組成;曲線中虛線表示同一位置的過(guò)濾數(shù)據(jù),主要由電纜的低頻振動(dòng)組成。從圖6可以看出,光纖的應(yīng)變變化為-139.8 με至169.1 με。初始沖擊后,應(yīng)變振幅呈指數(shù)衰減。此外,后續(xù)曲線還有部分振幅,分析原因:主要來(lái)自初始沖擊后的后續(xù)反彈。
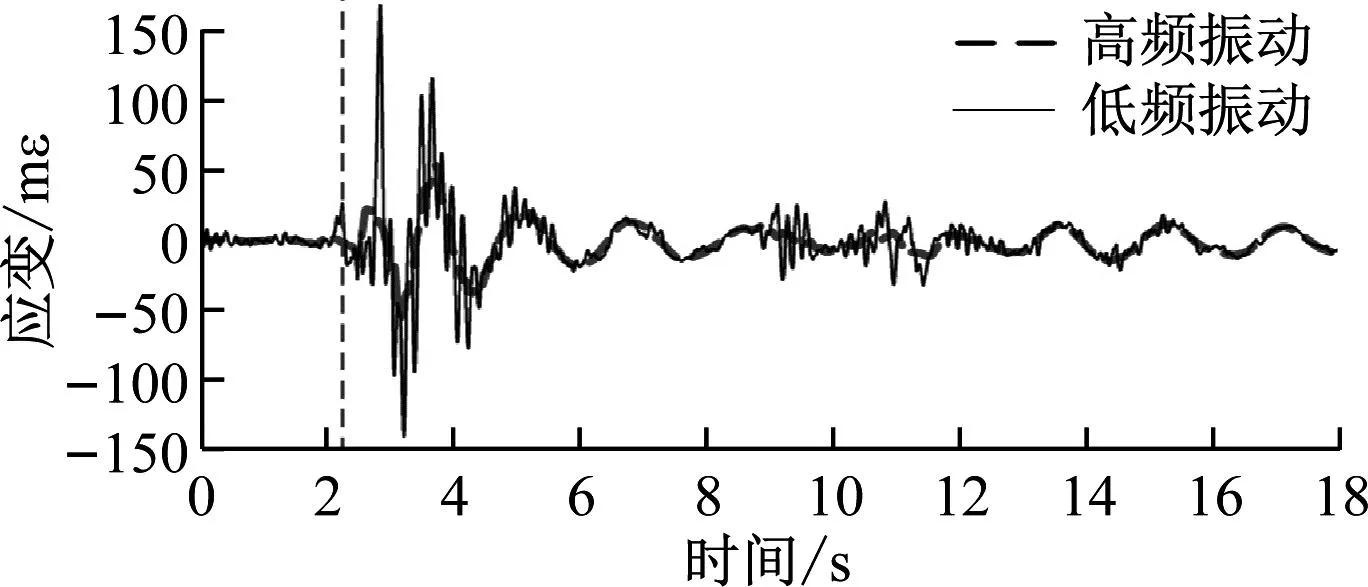
圖6 沖擊試驗(yàn)時(shí)撞擊點(diǎn)處的2D橫截面隨時(shí)間的變化曲線
試驗(yàn)結(jié)果符合實(shí)際,表明本文所提DVS監(jiān)測(cè)電力電纜方案可實(shí)現(xiàn)電力應(yīng)變曲線實(shí)時(shí)繪制,這為電力智能安防與檢測(cè)提供了重要的數(shù)據(jù)基礎(chǔ)。
4 總結(jié)
本文對(duì)電力電纜光纖監(jiān)測(cè)進(jìn)行了研究與分析,建立了一種基于分布式振動(dòng)傳感器的電纜光纖感知方案,可用于在安裝過(guò)程和運(yùn)行期間沿電纜的動(dòng)態(tài)應(yīng)變的定量分析,從而檢測(cè)和量化電纜的機(jī)械損傷。該模型為智能光纖安防發(fā)展提供了一定借鑒作用。
