地磁定位導(dǎo)航應(yīng)用和效能分析
2024-01-12 03:23:10李素敏王剛剛申志飛
全球定位系統(tǒng) 2023年6期
李素敏,王剛剛,申志飛
( 北京麥釘艾特科技有限公司, 北京 100013 )
0 引言
地磁場(chǎng)是一種基本地球物理場(chǎng)[1],由地球內(nèi)部磁場(chǎng)和外部磁場(chǎng)組成. 其中,內(nèi)部磁場(chǎng)主要由地核形成的主磁場(chǎng)和巖石圈層形成的地殼異常場(chǎng)組成,占地磁場(chǎng)的99%以上. 外部磁場(chǎng)主要由太陽(yáng)活動(dòng)作用于大氣電離層和磁層所產(chǎn)生的磁場(chǎng)疊加而成[2].
地磁場(chǎng)具有如下特點(diǎn),在地球近地空間連續(xù)分布,受地球磁性物質(zhì)分布不同,各個(gè)地域的地磁場(chǎng)存在差異,近地面磁場(chǎng)強(qiáng)度大,隨高度增加逐步衰減;起源于地核的主磁場(chǎng)變化周期以百年計(jì),起源于地殼的異常場(chǎng)變化以地質(zhì)年代記. 因此,主磁場(chǎng)和異常場(chǎng)特征穩(wěn)定;地球變化磁場(chǎng)主要來(lái)源于地球外部,存在隨時(shí)間變化的特性,在數(shù)百公里地理范圍內(nèi)變化趨勢(shì)一致. 地磁場(chǎng)已廣泛應(yīng)用于艦船和飛機(jī)的方位導(dǎo)航,利用指南針、磁羅盤(pán)等測(cè)量地磁場(chǎng)方位信息,以獲得穩(wěn)定的地球北指向[3].
地磁定位導(dǎo)航技術(shù)與方位測(cè)量技術(shù)不同,利用異常場(chǎng)強(qiáng)度隨地理空間位置變化具有不同分布的特性,實(shí)現(xiàn)對(duì)運(yùn)動(dòng)載體的定位. 通過(guò)安裝在運(yùn)動(dòng)載體上的磁場(chǎng)傳感器(磁力儀),實(shí)時(shí)測(cè)量運(yùn)動(dòng)航跡(軌跡)上的地磁場(chǎng)數(shù)據(jù),并提取異常場(chǎng)特征,與事先獲得并存儲(chǔ)的地磁場(chǎng)模型或地磁異常圖進(jìn)行匹配,以確定運(yùn)動(dòng)載體的實(shí)時(shí)位置[4-9],以用于導(dǎo)航或者定位跟蹤.
地磁定位導(dǎo)航作為多源融合定位導(dǎo)航技術(shù)體系中重要的技術(shù)手段之一,具有適用范圍廣、抗電磁干擾能力強(qiáng)、可全天時(shí)全天候工作等優(yōu)點(diǎn),為運(yùn)動(dòng)載體特別在地下、水下等衛(wèi)星信號(hào)接收受限的場(chǎng)景提供了一條無(wú)源被動(dòng)的自主定位導(dǎo)航技術(shù)途徑[10-13].
但是,要實(shí)現(xiàn)穩(wěn)定高精度的地磁定位性能,并不是一件容易的事情,需要重點(diǎn)考慮四個(gè)方面的因素:第一,地磁導(dǎo)航參考圖的制作和異常場(chǎng)特征的應(yīng)用;第二,選擇適合的磁力儀;第三,與磁力儀和運(yùn)動(dòng)載體相適配的實(shí)時(shí)測(cè)量方法;第四,與應(yīng)用場(chǎng)景和運(yùn)動(dòng)載體相適配的定位算法.
本文介紹了地磁定位導(dǎo)航的技術(shù)發(fā)展歷程,闡述了地磁定位在不同場(chǎng)景中應(yīng)用的關(guān)鍵技術(shù)和能力,給出了不同應(yīng)用場(chǎng)景下地磁定位的具體實(shí)現(xiàn)過(guò)程[14],分析了地磁定位應(yīng)用過(guò)程中存在的問(wèn)題,為地磁定位在不同場(chǎng)景和不同載體上的應(yīng)用提供一定參考.
1 地磁定位導(dǎo)航技術(shù)發(fā)展歷程
人類(lèi)使用地磁信息進(jìn)行導(dǎo)航具有悠久的歷史. 遠(yuǎn)有我國(guó)古代發(fā)明的指南針、航海羅盤(pán)等,近有14、15 世紀(jì)歐洲人使用羅盤(pán)進(jìn)行遠(yuǎn)洋航行,發(fā)現(xiàn)新大陸等壯舉,這都與地磁導(dǎo)航分不開(kāi). 20 世紀(jì)90 年代,隨著全球衛(wèi)星導(dǎo)航技術(shù)的發(fā)展,地磁定位導(dǎo)航技術(shù)的應(yīng)用需求牽引不強(qiáng),技術(shù)發(fā)展較為緩慢. 進(jìn)入21 世紀(jì)以來(lái),隨著對(duì)導(dǎo)航技術(shù)體系完備性建設(shè)的需求牽引,國(guó)內(nèi)外開(kāi)始重新重視地磁定位導(dǎo)航等物理場(chǎng)定位導(dǎo)航技術(shù)的研究,且隨著磁場(chǎng)測(cè)量?jī)x器的發(fā)展和對(duì)地磁場(chǎng)研究的深入,人們掌握了對(duì)地磁場(chǎng)的精確描述和準(zhǔn)確測(cè)量技術(shù),正在尋求基于地磁場(chǎng)特征變化的導(dǎo)航新方法,以期實(shí)現(xiàn)新的應(yīng)用場(chǎng)景.
2 地磁定位導(dǎo)航常用磁力儀傳感器
目前市面上主流磁力儀傳感器如表1 和 圖1 所示.
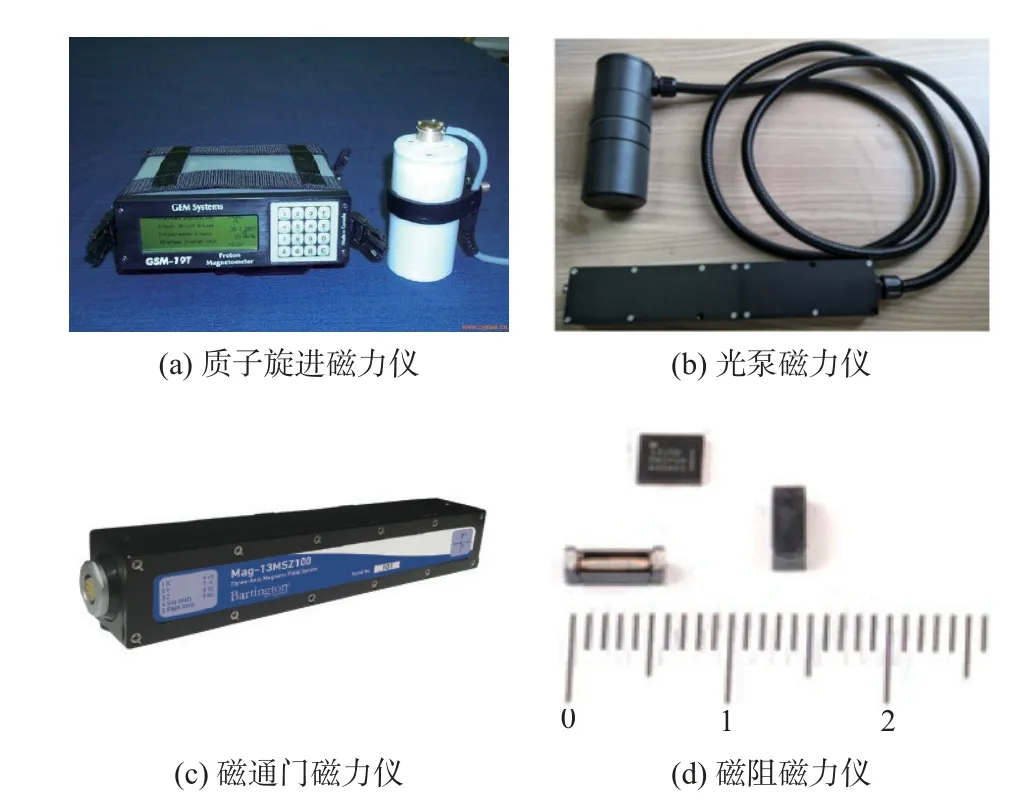
圖1 主流磁力儀傳感器
地磁場(chǎng)的標(biāo)量測(cè)量主要使用質(zhì)子旋進(jìn)磁力儀、光泵磁力儀等傳感器,其顯著特點(diǎn)是測(cè)量分辨率精度高,穩(wěn)定性好,但相應(yīng)裝置的體積較大,功耗較高. 因此,標(biāo)量測(cè)量適合外形尺寸較大的飛行器載體. 地磁場(chǎng)的矢量測(cè)量主要使用磁通門(mén)磁力儀、磁阻傳感器等,同步測(cè)量地磁場(chǎng)矢量的三個(gè)分量. 矢量測(cè)量可獲取地磁場(chǎng)的三分量信息,也可通過(guò)矢量求模計(jì)算間接獲得磁場(chǎng)的總強(qiáng)度,實(shí)現(xiàn)間接的標(biāo)量測(cè)量. 矢量磁力儀的測(cè)量精度、分辨率水平相對(duì)較低(0.1~5 nT),但體積相對(duì)較小,能耗、成本較低,故適用于小型飛行器載體、地面車(chē)輛、行人等.
3 航空地磁定位導(dǎo)航技術(shù)
航空地磁導(dǎo)航定位技術(shù)是指在飛行器載體內(nèi)應(yīng)用地磁導(dǎo)航定位技術(shù),這里的飛行器指在大氣層內(nèi),能飛離地面在空間飛行,可控制其飛行姿態(tài)和飛行高度的有人或無(wú)人飛行器. 地磁導(dǎo)航定位技術(shù)可作為衛(wèi)星導(dǎo)航定位技術(shù)、慣性導(dǎo)航技術(shù)等導(dǎo)航定位技術(shù)的補(bǔ)充,當(dāng)衛(wèi)星導(dǎo)航系統(tǒng)被干擾或不可用時(shí),地磁導(dǎo)航定位系統(tǒng)與慣性導(dǎo)航系統(tǒng)組合,可為飛行器提供位置坐標(biāo)信息,提高整個(gè)導(dǎo)航定位系統(tǒng)的可靠性和穩(wěn)定性.
3.1 航空地磁定位的特征量的選擇
地磁定位參考的特征可以分為直接特征和間接特征,直接特征是指地磁場(chǎng)的七要素,比如地磁場(chǎng)總強(qiáng)度、磁偏角、地磁場(chǎng)北向分量等;間接特征是指除了地磁場(chǎng)的七要素以外的特征,比如地磁場(chǎng)的空間梯度、頻譜特征等. 在選擇特征量時(shí),對(duì)特征量的選擇準(zhǔn)則可概括為:1)特征量的長(zhǎng)期變化比較穩(wěn)定;2)特征量的短期變化影響較小;3)特征量的實(shí)時(shí)測(cè)量對(duì)設(shè)備性能要求不高;4)基準(zhǔn)圖的獲取相對(duì)容易.
根據(jù)航空地磁定位的飛行平臺(tái)特點(diǎn),地磁場(chǎng)的總場(chǎng)強(qiáng)度或者總場(chǎng)強(qiáng)度的梯度是比較適合航空地磁定位的特征量. 傳感器選擇光泵磁力儀或者磁通門(mén)磁力儀.
3.2 航空地磁測(cè)量的實(shí)現(xiàn)
航空地磁能否實(shí)現(xiàn)準(zhǔn)確定位,在載體磁干擾下實(shí)現(xiàn)地磁場(chǎng)的實(shí)時(shí)準(zhǔn)確測(cè)量是關(guān)鍵因素. 載體組成部件中的各類(lèi)磁性體和金屬導(dǎo)體,均在其周?chē)臻g產(chǎn)生各種復(fù)雜的隨載體運(yùn)動(dòng)狀態(tài)變化而變化的載體干擾磁場(chǎng). 特別在載體空間狹小,安裝位置受限的情況下,干擾磁場(chǎng)具有相當(dāng)強(qiáng)度,影響地磁場(chǎng)的準(zhǔn)確測(cè)量,因此必須在實(shí)時(shí)測(cè)量過(guò)程中去除由于載體運(yùn)動(dòng)產(chǎn)生的干擾磁場(chǎng)[15].
載體的機(jī)械結(jié)構(gòu)、電控裝置、發(fā)動(dòng)機(jī)、隨動(dòng)部件等,均存在局部強(qiáng)磁場(chǎng),此外,由于載體姿態(tài)的變化,引起載體內(nèi)部的磁通變化而產(chǎn)生渦流電場(chǎng),進(jìn)而感生渦流磁場(chǎng). 這些構(gòu)成了對(duì)地磁場(chǎng)測(cè)量的復(fù)雜干擾.
載體固有磁干擾主要包括由載體結(jié)構(gòu)中的硬磁材料產(chǎn)生的剩磁干擾,以及電控裝置產(chǎn)生的雜散磁干擾等. 載體固有磁干擾與運(yùn)動(dòng)狀態(tài)無(wú)關(guān),但在載體運(yùn)動(dòng)時(shí),固有磁場(chǎng)矢量與地磁場(chǎng)矢量的夾角在不斷變化,由此引起合成磁場(chǎng)變化,進(jìn)而產(chǎn)生對(duì)測(cè)量結(jié)果的干擾. 根據(jù)載體結(jié)構(gòu)特點(diǎn),因固有磁干擾引起的干擾是最嚴(yán)重的背景干擾,其干擾強(qiáng)度與固有磁性的量值成正比.
載體的動(dòng)態(tài)磁干擾隨著載體運(yùn)動(dòng)狀態(tài)的變化而發(fā)生改變,主要包括由載體結(jié)構(gòu)受地磁場(chǎng)磁化而產(chǎn)生的感應(yīng)磁場(chǎng)(inducing magnetic field),以及殼體導(dǎo)電材料在地磁場(chǎng)中運(yùn)動(dòng)所產(chǎn)生的電渦流磁場(chǎng)(eddy current magnetic field)等,其分布特性比較復(fù)雜,對(duì)地磁場(chǎng)實(shí)時(shí)測(cè)量結(jié)果產(chǎn)生顯著干擾.
采用光泵磁力儀作為地磁總強(qiáng)度直接測(cè)量?jī)x器,同時(shí)使用三軸矢量傳感器等提供載體在背景場(chǎng)中的姿態(tài)信息,用背景干擾磁場(chǎng)補(bǔ)償模型,對(duì)背景干擾磁場(chǎng)進(jìn)行補(bǔ)償,消除載體剩磁、感應(yīng)磁場(chǎng)和渦流磁場(chǎng)對(duì)測(cè)量結(jié)果的影響,實(shí)現(xiàn)對(duì)磁場(chǎng)的精確測(cè)量,測(cè)量系統(tǒng)如圖2 所示.
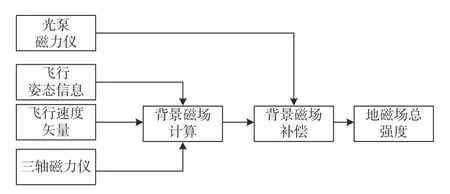
圖2 航空地磁定位測(cè)量系統(tǒng)
3.3 航空地磁定位方法
航空地磁定位常采用批相關(guān)處理算法,批相關(guān)處理算法的基本思想是:當(dāng)飛行器運(yùn)行一段時(shí)間后,將慣性導(dǎo)航系統(tǒng)輸出的位置估計(jì)序列輸入預(yù)先存儲(chǔ)的地磁場(chǎng)基準(zhǔn)圖得到對(duì)應(yīng)的磁場(chǎng)強(qiáng)度序列(推估強(qiáng)度序列),與由磁傳感器測(cè)得的真實(shí)航跡下的地磁強(qiáng)度序列(實(shí)測(cè)強(qiáng)度序列)進(jìn)行相關(guān)處理,所得相關(guān)極值點(diǎn)對(duì)應(yīng)的位置就是匹配位置,然后利用這個(gè)位置來(lái)對(duì)慣導(dǎo)系統(tǒng)進(jìn)行修正.
假設(shè)推估強(qiáng)度序列的特征函數(shù)為T(mén)(x,y,z) ,實(shí)測(cè)強(qiáng)度序列的特征函數(shù)為D(x,y,z) , (x,y,z) 是空間坐標(biāo),兩序列的幾何度量同為V. 則常用的相關(guān)極值函數(shù)定義為:
互相關(guān)算法(cross correlation,COR)
相關(guān)系數(shù)算法(correlation coefficient,CC)
平均絕對(duì)差算法(mean absolute difference,MAD)
均方差算法(Mean Square Difference,MSD)
批相關(guān)匹配算法具有如下優(yōu)點(diǎn):
1) 對(duì)初始位置誤差要求低;
2) 不必對(duì)磁場(chǎng)做任何線性化假設(shè),只要磁場(chǎng)變化特征明顯就可以工作;
3) 求得的是全局最優(yōu)解.
批相關(guān)匹配算法需要進(jìn)一步改進(jìn)的地方有:
1) 如果推估強(qiáng)度序列由全局產(chǎn)生,即在整個(gè)地磁導(dǎo)航參考圖中搜索;
2) 對(duì)導(dǎo)航系統(tǒng)在采集匹配數(shù)據(jù)期間的速度誤差和航向誤差敏感,因此采集數(shù)據(jù)的長(zhǎng)度有限;
3) 存在基準(zhǔn)磁圖搜索間隔的量化誤差,使用小的搜索間隔能減少這種誤差,但會(huì)增加計(jì)算量;
4) 處理數(shù)據(jù)量大,對(duì)數(shù)字計(jì)算機(jī)要求高,實(shí)時(shí)性較難保證. 無(wú)論是基準(zhǔn)磁圖的搜索、變換,相關(guān)計(jì)算、比較都有大量數(shù)據(jù)需要處理,故實(shí)時(shí)較差.
5) 由于在相關(guān)處理算法中,實(shí)測(cè)強(qiáng)度序列始終以磁傳感器采集的數(shù)據(jù)為基準(zhǔn),并未考慮其誤差,故此算法的魯棒性差.
3.4 航空地磁定位導(dǎo)航應(yīng)用條件和效能分析
航空地磁定位導(dǎo)航能力受地磁圖精度、地磁測(cè)量精度、地磁場(chǎng)特征分布的差異性等因素影響,是一個(gè)復(fù)雜的過(guò)程. 圖3 是某一區(qū)域的地磁異常分布圖,特征分布較為理想. 圖4 是定位結(jié)果,航空地磁定位一般具有幾十米到幾百米的定位精度能力,是一種較好的自主定位導(dǎo)航手段.
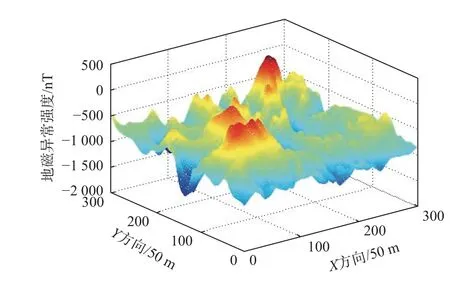
圖3 實(shí)測(cè)平面的某局部區(qū)域磁圖
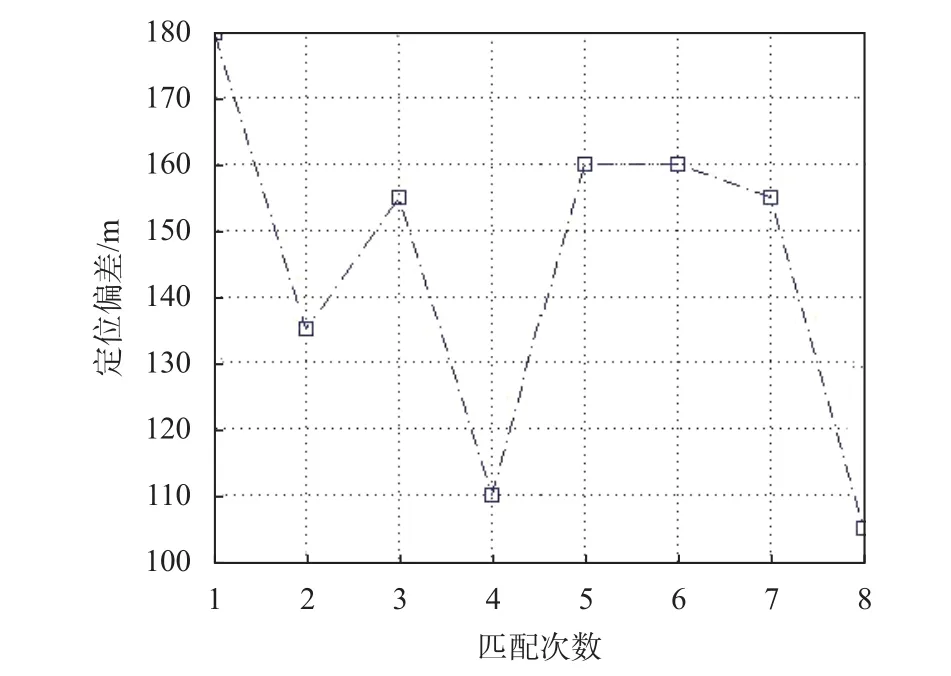
圖4 定位結(jié)果
隨著飛行高度的增加,由于地磁場(chǎng)特征變?nèi)酰饾u影響定位精度,故地磁定位一般適用于低空飛行的飛行器.
4 水下地磁定位導(dǎo)航技術(shù)
水下地磁定位導(dǎo)航技術(shù)是指在水面或水下航行器內(nèi)應(yīng)用地磁定位導(dǎo)航技術(shù),航行器是指可以航行于水面或水下,或兩者兼可的航行體,包括載人航行器和無(wú)人航行器. 在海洋開(kāi)發(fā)日益重要的現(xiàn)在,航行器能夠完成運(yùn)輸、勘探、偵測(cè)甚至是軍事上的進(jìn)攻防守等任務(wù),無(wú)論是在民用還是在軍用上,都扮演著重要的角色. 導(dǎo)航定位技術(shù)作為航行器能否順利執(zhí)行任務(wù)的關(guān)鍵技術(shù)之一,發(fā)揮著重要作用. 地磁定位導(dǎo)航技術(shù)作為一種導(dǎo)航定位手段,為航行器的導(dǎo)航定位提供了多種選擇[16-18].
4.1 水下地磁定位的特征量的選擇
水下載體一般采取拖曳式測(cè)量方式,磁力儀很難姿態(tài)穩(wěn)定,而且磁力儀的姿態(tài)和水下載體的姿態(tài)并不相同,故無(wú)法通過(guò)水下載體的姿態(tài)測(cè)量系統(tǒng)獲得磁力儀的姿態(tài),也無(wú)法獲得磁傳感器在大地坐標(biāo)系下的姿態(tài),所以根據(jù)水下平臺(tái)的運(yùn)動(dòng)和磁測(cè)特點(diǎn),水下應(yīng)用地磁定位導(dǎo)航技術(shù),優(yōu)選地磁場(chǎng)總場(chǎng)強(qiáng)度是比較適合的特征量,磁力儀傳感器可選擇光泵磁力儀或者磁通門(mén)磁力儀,光泵磁力儀可直接測(cè)得地磁場(chǎng)總強(qiáng)度,磁通門(mén)磁力儀可通過(guò)三分量矢量求和的方式計(jì)算得到地磁場(chǎng)總強(qiáng)度[19].
4.2 水下地磁測(cè)量的實(shí)現(xiàn)
為了減少船體對(duì)測(cè)量的影響,水下地磁測(cè)量盡量選擇拖曳式測(cè)量方式,拖曳距離與船體的干擾大小有關(guān),船體磁場(chǎng)越大,拖曳距離越遠(yuǎn). 一般選擇50~100 m.
對(duì)每一條測(cè)線根據(jù)起始位置判斷測(cè)量方向,定義X方向指東,Y方向指北. 對(duì)于南北向測(cè)線,由南→北,需要在Y方向上減去拖魚(yú)至差分全球定位系統(tǒng)(Differential Global Positioning System,DGPS)天線之間線纜長(zhǎng)度;反之,則加上拖魚(yú)至DGPS 天線之間線纜長(zhǎng)度. 對(duì)于東西向測(cè)線,則需對(duì)測(cè)量數(shù)據(jù)進(jìn)行X方向上位置修正,由西→東,需要在X方向上減去拖魚(yú)至DGPS 天線之間線纜長(zhǎng)度;反之,則加上拖魚(yú)至DGPS 天線之間線纜長(zhǎng)度. 對(duì)于斜向,首先根據(jù)斜率分別計(jì)算X、Y方向修正值,然后根據(jù)X、Y方向分別進(jìn)行修正[20-21]. 圖5 為海洋地磁測(cè)量船及主要儀器設(shè)備圖.

圖5 海洋地磁測(cè)量船及主要儀器設(shè)備
4.3 水下地磁定位方法
由于地磁本身存在的擾動(dòng)性,以及磁力儀拖曳存在一定擺動(dòng),即使對(duì)非線性函數(shù)采用高階近似,仍然存在非量測(cè)的誤差干擾. 同時(shí)地磁場(chǎng)分布在量測(cè)序列的有限區(qū)間內(nèi),無(wú)法保證滿足高斯分布. 水下地磁定位采用適用于較大干擾環(huán)境,基于蒙特卡羅隨機(jī)采樣的粒子濾波算法[22-23],解決非線性動(dòng)態(tài)系統(tǒng)過(guò)程狀態(tài)非高斯分布的濾波問(wèn)題.
濾波中應(yīng)用蒙特卡羅方法可以追溯至1969 年70 年代. 作為非線性濾波方法之一的粒子濾波,可以針對(duì)非線性和非高斯模型. 它是一種對(duì)于給定狀態(tài)變量分布序列提供迭代蒙特卡羅近似的算法,它通過(guò)采集狀態(tài)空間的大量點(diǎn)近似所需的概率密度函數(shù)(probability density function,PDF),這些點(diǎn)被稱(chēng)為粒子. 每一個(gè)粒子對(duì)應(yīng)一個(gè)給定的權(quán)值,狀態(tài)變量的分布可以采用依賴(lài)于每個(gè)粒子的離散分布近似. 每個(gè)粒子賦予的概率正比于權(quán)重. 這些粒子是按照所需PDF隨機(jī)選定的采樣. 于是,隨著粒子數(shù)目的增加,它們有效的提供了對(duì)于所需PDF 的良好近似.
濾波模型的狀態(tài)誤差方程是線性的,為
實(shí)際應(yīng)用過(guò)程中,可取系統(tǒng)狀態(tài)誤差方程相對(duì)簡(jiǎn)化的模型進(jìn)行處理.Xt是狀態(tài)變量,wt是狀態(tài)誤差,如下式所示:
式中: δφ、 δλ 、 δh分別為經(jīng)度、緯度、高度誤差; δVE、δVN、 δVU分別為n系中E、N、U 向速度誤差; ?E、 ?N、?U分別為E、N、U 向平臺(tái)誤差角; ?E、?N、?U為捷聯(lián)加速度計(jì)的零位誤差; εE、εN、εU為捷聯(lián)陀螺的隨機(jī)漂移.
經(jīng)離散化處理后,磁力儀實(shí)時(shí)測(cè)量的地磁總強(qiáng)度幅值是水下載體位置的非線性函數(shù),在地理坐標(biāo)系中表示為
式中: (φT,λT) 為水下載體在大地坐標(biāo)系下的真實(shí)位置;vt為實(shí)時(shí)測(cè)量誤差.
按照慣性導(dǎo)航系統(tǒng)指示位置(φINS,λINS),以及狀態(tài)誤差方程的誤差分量(δφ,δλ),量測(cè)方程可表示為
由于量測(cè) (φINS,λINS) 對(duì)于每離散時(shí)刻慣性導(dǎo)航系統(tǒng)均給出,因此量測(cè)方程即是狀態(tài)誤差分量(δφ,δλ)的非線性函數(shù).
該模型中的狀態(tài)誤差方程與量測(cè)方程中的誤差向量wt、vt可以不滿足高斯分布,這增加了濾波算法處理的復(fù)雜度.
重要性密度函數(shù)通常選擇轉(zhuǎn)移概率密度函數(shù)
利用實(shí)測(cè)數(shù)據(jù)對(duì)上述方法進(jìn)行了仿真驗(yàn)證,磁測(cè)數(shù)據(jù)的網(wǎng)格間距為50 m,共480×480 個(gè)點(diǎn). 粒子采樣數(shù)為50000. 仿真實(shí)驗(yàn)結(jié)果如圖6~8 所示,其中虛線為粒子濾波迭代定位單方向誤差,而實(shí)線為慣性導(dǎo)航指示位置與真實(shí)航跡之間的偏差. 由圖可以看出,在經(jīng)過(guò)初期的振蕩之后,兩方向上均趨向真實(shí)位置. 同時(shí)因?yàn)榱W訑?shù)目較多,收斂的速度較慢.
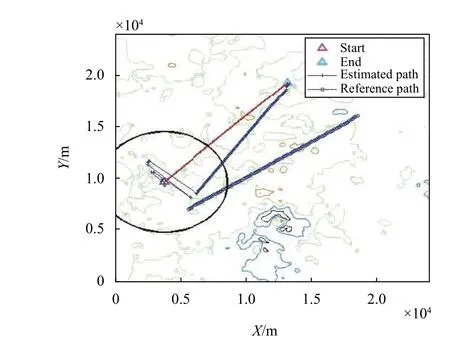
圖6 定位仿真試驗(yàn)結(jié)果
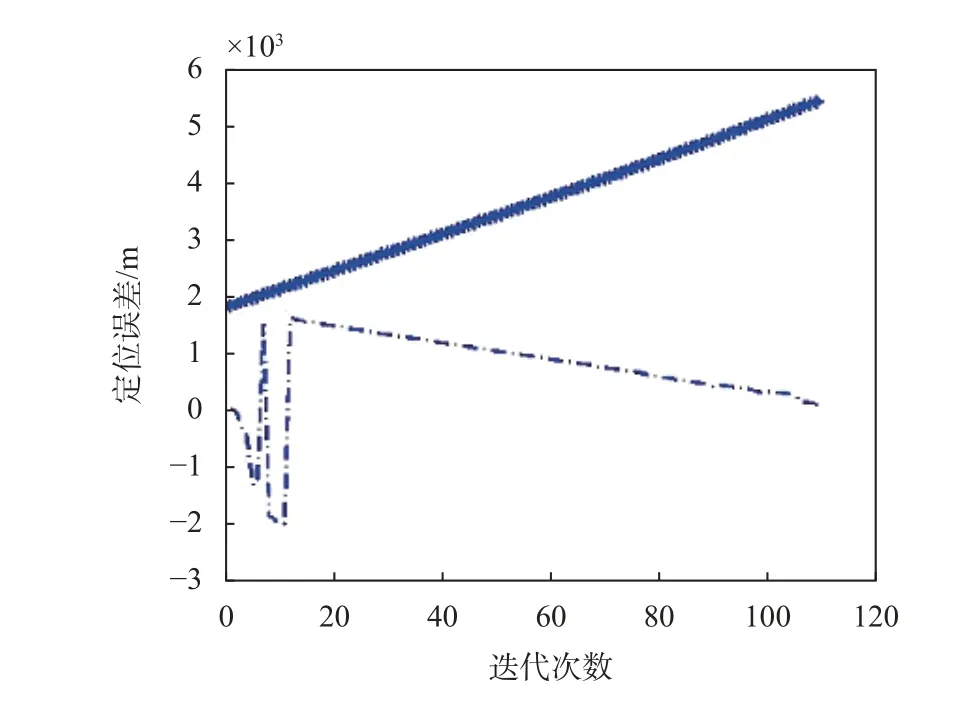
圖7 緯度方向定位誤差
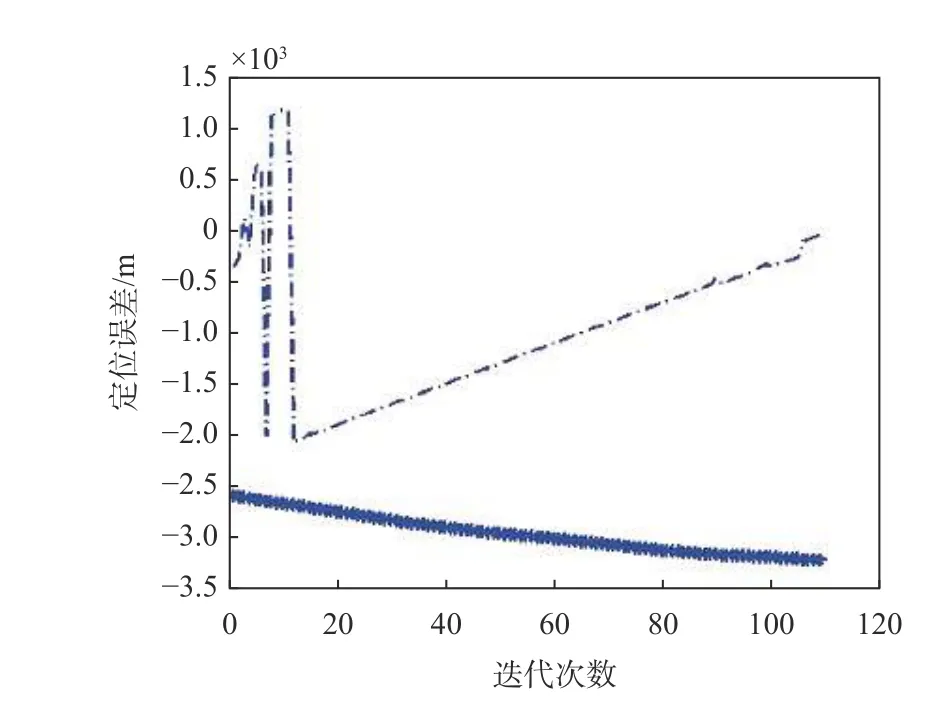
圖8 經(jīng)度方向定位誤差
粒子濾波算法在初始采樣估計(jì)的過(guò)程中,存在偏離載體真實(shí)位置的可能,但隨著采樣估計(jì)的遞推,可使定位結(jié)果恢復(fù)至水下載體真實(shí)位置附近. 同時(shí)雖然水下載體航行低速的特點(diǎn)對(duì)算法的實(shí)時(shí)性要求不高,粒子濾波算法的運(yùn)算速度方面仍需改進(jìn)[24].
4.4 水下地磁定位導(dǎo)航應(yīng)用條件和效能分析
對(duì)于水下應(yīng)用而言,潛艇由于鋼結(jié)構(gòu),潛艇磁場(chǎng)對(duì)地磁測(cè)量精度影響較大,目前除了拖曳遠(yuǎn)離外,尚無(wú)有效處理方法,這在一定程度上影響了地磁定位在水下平臺(tái)應(yīng)用的靈活性.
同樣,除了測(cè)量精度以外,水下地磁定位導(dǎo)航能力也受水下地磁圖精度、地磁場(chǎng)特征分布的差異性等因素的影響,特別受地磁圖精度影響,水下地磁定位一般具有幾百米到1 km 的定位精度能力,但地磁定位作為一種無(wú)源被動(dòng)的定位技術(shù)手段,抗干擾能力強(qiáng),在水下應(yīng)用也具有一定的獨(dú)特優(yōu)勢(shì).
5 地面車(chē)輛地磁定位導(dǎo)航技術(shù)
無(wú)人駕駛汽車(chē)和機(jī)器人等地面無(wú)人交通和運(yùn)輸工具,給人們的工作和生活帶來(lái)越來(lái)越多的便利,隨著5G、高分辨率地圖、傳感器技術(shù)、人工智能技術(shù)等的發(fā)展,無(wú)人駕駛車(chē)輛受到越來(lái)越多的關(guān)注,成為新一代信息技術(shù)領(lǐng)域的研究熱點(diǎn)[25-26]. 國(guó)內(nèi)外對(duì)于無(wú)人駕駛汽車(chē)的研究多衍生于微型輪式移動(dòng)車(chē)輛控制領(lǐng)域,集中于對(duì)車(chē)輛局部周邊環(huán)境感知、同時(shí)定位與地圖構(gòu)建、運(yùn)動(dòng)規(guī)劃與控制的研究. 實(shí)時(shí)精確定位行駛中車(chē)輛對(duì)于車(chē)輛導(dǎo)航系統(tǒng)、車(chē)聯(lián)網(wǎng)、無(wú)人駕駛汽車(chē)等智能車(chē)輛技術(shù)是十分重要的. 各種采用單一定位源進(jìn)行獨(dú)立的定位方案,均存在不同類(lèi)型缺點(diǎn):GNSS 無(wú)法高頻輸出,且受障礙物干擾嚴(yán)重;慣性導(dǎo)航系統(tǒng)定位誤差隨時(shí)間積累,較長(zhǎng)時(shí)間后定位結(jié)果存在很大偏差,采用單一定位源的車(chē)輛定位方法可靠性無(wú)法保證. 近年來(lái)采用多傳感器融合進(jìn)行車(chē)輛定位的方法受到越來(lái)越高的重視,特別是地磁定位導(dǎo)航技術(shù),是對(duì)現(xiàn)有導(dǎo)航定位技術(shù)的一個(gè)有效補(bǔ)充[27].
5.1 地面車(chē)輛地磁定位的特征量的選擇
根據(jù)地面車(chē)輛的運(yùn)動(dòng)特點(diǎn),磁力儀可固定安裝在車(chē)上,所以在地面車(chē)輛上,和其他場(chǎng)景和平臺(tái)不同的是,道路上行駛的車(chē)輛除了可以選擇地磁場(chǎng)總場(chǎng)強(qiáng)度以外,還可以選擇三分量作為地磁定位的特征量. 測(cè)力儀選擇光泵磁力儀或者磁通門(mén)磁力儀.
5.2 地面車(chē)輛地磁測(cè)量的實(shí)現(xiàn)
建立磁通門(mén)磁力儀零偏、靈敏度、正交誤差角三個(gè)固有參數(shù)與輸出磁場(chǎng)強(qiáng)度關(guān)系的理論模型,通過(guò)標(biāo)量匹配法,給出基于最小二乘法求解磁力儀的9 個(gè)固有參數(shù)求解算法,然后對(duì)磁通門(mén)磁力儀的9 個(gè)固有參數(shù)修正.
5.3 地面車(chē)輛地磁定位方法
3.3 節(jié)所述的批相關(guān)處理算法在測(cè)量噪聲較低的情況下,定位效果較好. 結(jié)合地面車(chē)輛地磁場(chǎng)存在較大擾動(dòng)、測(cè)量誤差大的狀況,車(chē)輛地磁定位采用Huber型M-估計(jì)的方法改進(jìn)前文提出的批相關(guān)函數(shù).
M-估計(jì)是最大似然率估計(jì)的一種常用形式,其中參數(shù)P*可以通過(guò)最大化其對(duì)應(yīng)的似然方程F來(lái)獲得. 求解P*的過(guò)程如下所示:
式中,參量ri為第i數(shù)據(jù)點(diǎn)的殘差.M-估計(jì)器可以表征為更一般形式的求解過(guò)程如式(10),其中 ρ(·) 是對(duì)稱(chēng)正定函數(shù),極值唯一且為0,而且階數(shù)低于二次.
該問(wèn)題經(jīng)常歸為一個(gè)迭代加權(quán)最小二乘問(wèn)題加以解決. 參數(shù)向量P=(p1,p2,···,pn)T可以通過(guò)求解如下兩式來(lái)估計(jì)得到,j=1,2,···,n.
影響函數(shù) ψ(·) 衡量數(shù)據(jù)點(diǎn)對(duì)參數(shù)估計(jì)值的權(quán)重.對(duì)于一個(gè)容錯(cuò)性較好的估計(jì)器,任何一個(gè)單點(diǎn)數(shù)據(jù)并不引入明顯的錯(cuò)誤,這就使得它對(duì)野值不敏感. 具體的M-估計(jì)器應(yīng)該在P中有界并且為凸集. 而且當(dāng).
Huber 函數(shù)是M-估計(jì)器的一種有效實(shí)現(xiàn)方式.它是0 值附近的拋物線,在給定的 |r|>k范圍內(nèi)線性增加,這限制了野值的影響. 利用該估計(jì)器,標(biāo)準(zhǔn)正態(tài)分布接近95%的漸進(jìn)效率可以通過(guò)調(diào)諧常數(shù)k=1.345σ獲得,其中 σ 是誤差的估計(jì)標(biāo)準(zhǔn)偏差. 對(duì)于調(diào)諧常數(shù)k的相同值,它對(duì)于很多正態(tài)分布同等有效.構(gòu)成M-估計(jì)器的方程 ρ(·) 和影響函數(shù) ψ(·) 如式(15)~(16)所示.
Huber 型M-估計(jì)器相關(guān)度(Huber’s M-estimation Corelation, HMC)給出了測(cè)量序列與基準(zhǔn)磁圖中的供比較序列之間的相似度度量,它的值可以利用Huber統(tǒng)計(jì)計(jì)算得到. 相關(guān)的掩膜函數(shù)可以壓縮野值的影響. 為計(jì)算相關(guān)度的標(biāo)準(zhǔn)差 σ 是一個(gè)關(guān)鍵參數(shù),它可以通過(guò)測(cè)量序列和可供比較序列的殘差自適應(yīng)尋找過(guò)程中計(jì)算出來(lái).
假定si和Si分別代表測(cè)量序列和供匹配序列的數(shù)據(jù)點(diǎn)值,而m和M分別表示影響函數(shù).
第1 步:利用式(16)的影響函數(shù),掩膜函數(shù)m(i)和M(i) 計(jì)算如下.
第2 步:按照式(16)迭代計(jì)算測(cè)量序列與供匹配序列之間的HMC 值.
第3 步:計(jì)算HMC 最大值所對(duì)應(yīng)的位置,可作為車(chē)輛當(dāng)前時(shí)刻的位置.
5.4 地面車(chē)輛地磁定位導(dǎo)航應(yīng)用條件和效能分析
從原理上講,地面車(chē)輛地磁定位導(dǎo)航能力也受道路地磁圖精度、地磁測(cè)量精度、地磁場(chǎng)特征分布的差異性等因素影響. 不同的應(yīng)用場(chǎng)景,上述因素對(duì)地磁定位能力的影響權(quán)重不同. 對(duì)于地面地磁定位應(yīng)用,更多要考慮周?chē)h(huán)境引起的測(cè)量噪聲和干擾,比如距離較近的其他車(chē)輛等. 地面車(chē)輛地磁定位一般可取得幾米到十幾米的定位精度能力,通過(guò)路徑約束和規(guī)劃可進(jìn)一步提高定位精度.
6 行人地磁定位導(dǎo)航技術(shù)
面向行人的導(dǎo)航定位技術(shù)特別是室內(nèi)/地下等封閉空間的行人定位成為當(dāng)前的研究熱點(diǎn). 行人導(dǎo)航定位可以用于消費(fèi)者在購(gòu)物中心、車(chē)站、機(jī)場(chǎng)、場(chǎng)館等的室內(nèi)信息指引,幫助消費(fèi)者快速找人、找店、找車(chē)、找停車(chē)位,提升用戶(hù)出行、消費(fèi)和娛樂(lè)體驗(yàn);在一些特殊行業(yè),比如化工廠、礦山、電廠,出于安全監(jiān)管,需要對(duì)人員的定位跟蹤,當(dāng)人員誤入危險(xiǎn)區(qū)域時(shí),及時(shí)報(bào)警,提升企業(yè)安全管理的智能化水平;在應(yīng)急救援搜救、反恐、消防、軍事、執(zhí)法、罪犯跟蹤等應(yīng)用領(lǐng)域,通過(guò)定位,掌握任務(wù)執(zhí)行人員的位置和狀態(tài),確保任務(wù)安全可靠協(xié)同高效執(zhí)行[28-30].
位置服務(wù)對(duì)行人意義重大,但是人類(lèi)70%的活動(dòng)場(chǎng)景在室內(nèi),而GNSS 適合室外無(wú)遮擋區(qū)域的位置服務(wù),所以行人導(dǎo)航定位不能完全依賴(lài)GNSS,地磁定位導(dǎo)航技術(shù)為行人在室內(nèi)或者地下等封閉空間的位置服務(wù)提供了一種技術(shù)途經(jīng).
6.1 行人地磁定位的特征量的選擇
通過(guò)行人攜帶的智能手機(jī)或者其他定制終端隨著人的行走,其內(nèi)部的磁傳感器芯片不斷采集磁場(chǎng)數(shù)據(jù),并完成定位計(jì)算. 由于磁傳感器無(wú)法和行人進(jìn)行固定連接,所以只能選擇地磁場(chǎng)總強(qiáng)度作為行人地磁定位的特征量[31].
6.2 行人地磁測(cè)量的實(shí)現(xiàn)
人員定位對(duì)傳感器的成本、大小和易用性提出了特別要求,隨著芯片技術(shù)的發(fā)展,目前磁阻傳感器已經(jīng)可以滿足人員定位需求,所以人員定位選擇磁阻傳感器作為磁場(chǎng)測(cè)量?jī)x器,通過(guò)三分量磁場(chǎng)合成總場(chǎng)強(qiáng)度實(shí)現(xiàn)定位.
6.3 行人地磁定位方法
對(duì)于行人地磁定位,首先完成地磁數(shù)據(jù)庫(kù)的構(gòu)建;在定位階段,提取智能手機(jī)提供的角速度、加速度、磁以及藍(lán)牙掃描得到的信號(hào)強(qiáng)度,首先基于加速度數(shù)據(jù)進(jìn)行行人步態(tài)檢測(cè)及步長(zhǎng)估計(jì),并結(jié)合航向信息進(jìn)行行人航位推算 (pedestrian dead reckoning,PDR),然后將磁場(chǎng)數(shù)據(jù)和PDR 結(jié)果進(jìn)行對(duì)應(yīng),提取一定長(zhǎng)度的含有相對(duì)位置的磁場(chǎng)數(shù)據(jù),完成位置計(jì)算.
行人航位推算由式(20)計(jì)算得到:
式中: Posxi、 Posyi為當(dāng)前相對(duì)位置; Lenstep表示當(dāng)前一步的步長(zhǎng); ψ 表示由智能設(shè)備輸出的航向信息.
行人步態(tài)檢測(cè)基于式(21)得到
式中, Acc 為合加速度; throld1acc為合加速度閾值;Var為方差; Accmax為設(shè)定周期內(nèi)合加速度的最大值;Accmin為設(shè)定周期內(nèi)合加速度的最小值; throld2acc:為設(shè)定周期內(nèi)合加速度峰峰值閾值.
行人步長(zhǎng)估計(jì)由式(22)獲得
式中:f s為慣性傳感器采集頻率;f sstep為當(dāng)前一步持續(xù)的時(shí)長(zhǎng).
式中: disi為待定位樣本i計(jì)算得到的距離;Mnow,j為當(dāng)前軌跡第j個(gè)點(diǎn)對(duì)應(yīng)的磁場(chǎng)值;Mdb,i為基于當(dāng)前待定位樣本提取得到的磁場(chǎng)數(shù)據(jù)庫(kù)中的第j個(gè)磁場(chǎng)值;n表示當(dāng)前軌跡上含有的磁場(chǎng)數(shù)據(jù)數(shù)目.
基于式(23)計(jì)算得到距離信息后,根據(jù)式(24)計(jì)算初步的每個(gè)待定位樣本的權(quán)重.
然后基于式(24)對(duì)權(quán)重進(jìn)行歸一化
最后通過(guò)式(23)獲取最終的定位結(jié)果計(jì)算.
式中, (xj,yj) 表示第j個(gè)待定位樣本所處的平面位置.
對(duì)本文所描述的多源信息融合定位方法進(jìn)行試驗(yàn)驗(yàn)證,驗(yàn)證場(chǎng)所選取為辦公室環(huán)境,并包含一條長(zhǎng)直走廊. 掃描設(shè)備掃描到的場(chǎng)景平面圖如圖9 所示,長(zhǎng)50 m,寬20 m. 生成的磁場(chǎng)平面分布如圖10 所示.
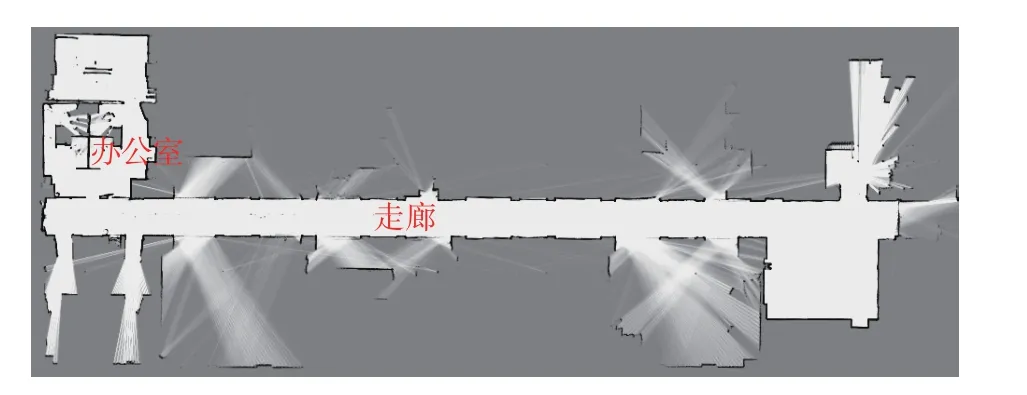
圖9 試驗(yàn)場(chǎng)景平面圖
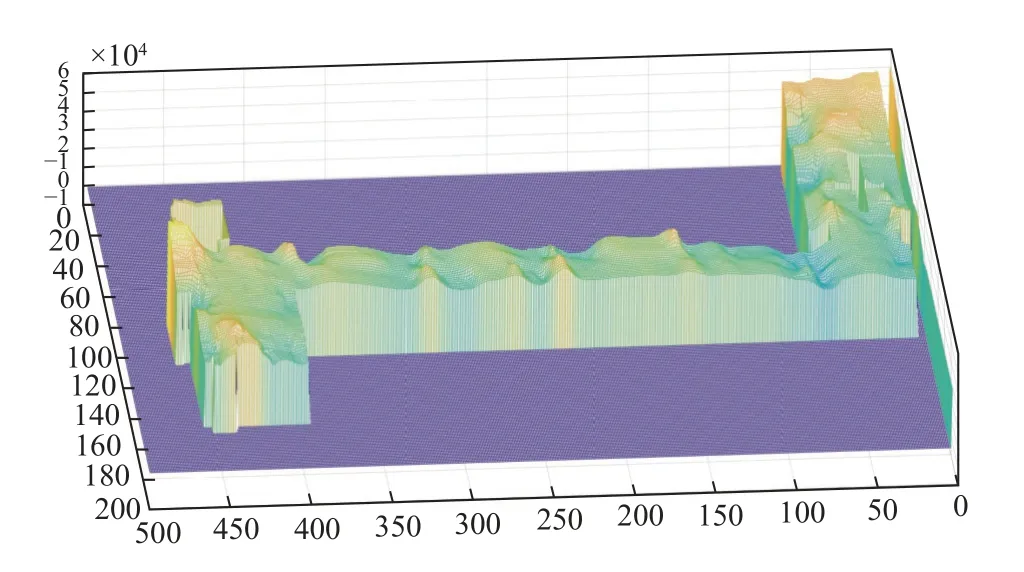
圖10 驗(yàn)證場(chǎng)景磁場(chǎng)分布圖
進(jìn)行定位驗(yàn)證時(shí),行走軌跡如圖11 所示,實(shí)時(shí)定位結(jié)果如圖12 所示,誤差概率累積分布圖如圖13 所示,60%概率下定位誤差小于1.4 m.

圖11 定位驗(yàn)證時(shí)行走軌跡
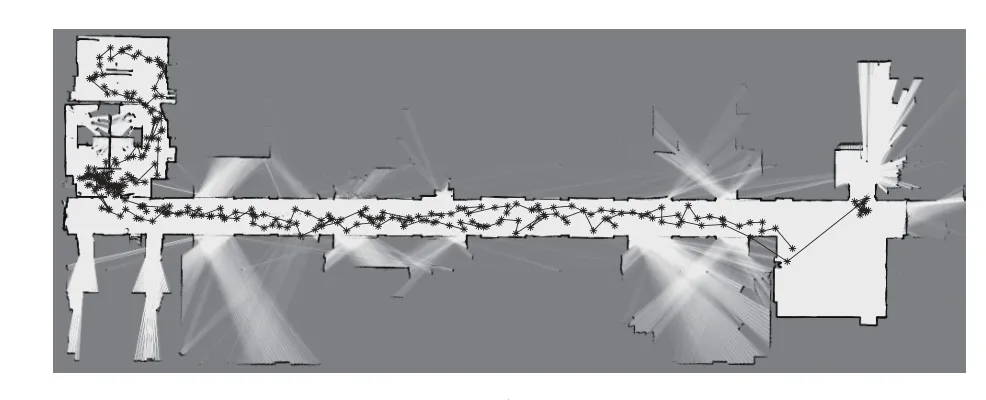
圖12 定位結(jié)果
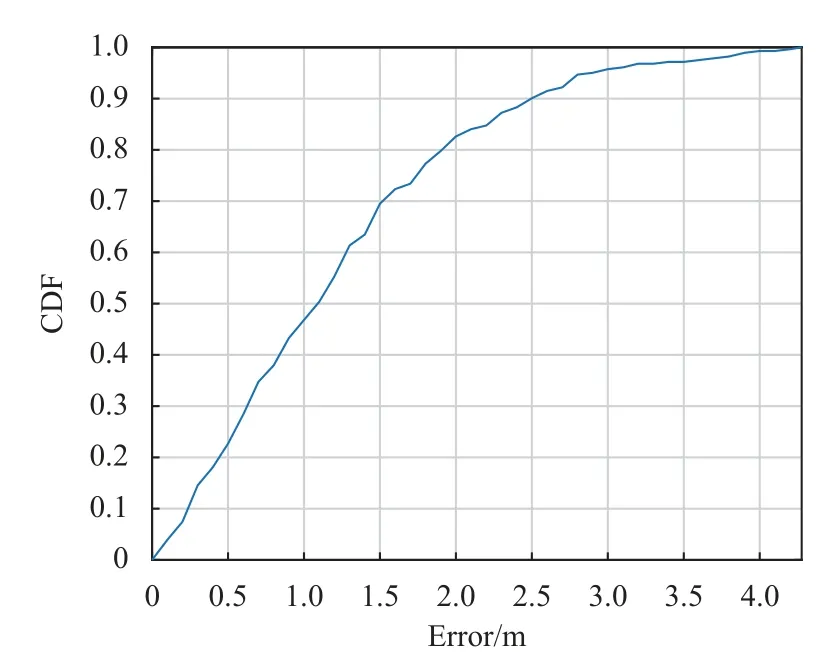
圖13 誤差概率累積分布圖
6.4 行人地磁定位導(dǎo)航應(yīng)用條件和效能分析
由于定位終端不能與行人固定連接,所以行人地磁定位導(dǎo)航需要實(shí)時(shí)解算定位終端坐標(biāo)系與行人導(dǎo)航坐標(biāo)系的轉(zhuǎn)換關(guān)系,在復(fù)雜的室內(nèi)應(yīng)用場(chǎng)景下,存在由于行人航向獲取失敗,地磁定位失效的風(fēng)險(xiǎn). 因此行人地磁定位導(dǎo)航能力與行人佩戴定位終端的方式有關(guān),一般情況下,定位終端腰帶式效果最好,手持式次之,頭戴式較差. 行人地磁定位一般可取得60 cm到2 m 的定位精度能力,通過(guò)約束人員佩戴方式,能夠確保地磁定位保持在較高定位精度水平.
7 結(jié)束語(yǔ)
本文對(duì)地磁定位在不同的應(yīng)用場(chǎng)景和應(yīng)用平臺(tái)下的實(shí)現(xiàn)過(guò)程進(jìn)行了詳細(xì)描述,由于磁場(chǎng)信息天然存在、變化豐富;磁場(chǎng)定位是無(wú)源定位,不需要借助外在通信信號(hào),不向外輻射能量,隱蔽性強(qiáng);一般人工很難產(chǎn)生大范圍的固有磁干擾,影響環(huán)境磁場(chǎng)分布特性,而環(huán)境中的電流、電氣設(shè)備開(kāi)關(guān)機(jī)、無(wú)線電等產(chǎn)生的隨機(jī)干擾磁場(chǎng)其頻譜和環(huán)境固有磁場(chǎng)的頻譜存在明顯差異,可以通過(guò)專(zhuān)業(yè)的磁信號(hào)處理方法進(jìn)行識(shí)別處理,因此磁場(chǎng)定位具有較強(qiáng)的抗干擾能力,廣泛的適應(yīng)性,為特殊場(chǎng)景的導(dǎo)航定位提供了一條重要的技術(shù)途徑.
但是同依賴(lài)環(huán)境信息進(jìn)行定位導(dǎo)航的其他定位導(dǎo)航手段一樣,地磁定位導(dǎo)航能力對(duì)地磁場(chǎng)基礎(chǔ)數(shù)據(jù)具有較強(qiáng)的依賴(lài)性,需要提前獲取,這在一定程度上限制和制約了地磁定位導(dǎo)航技術(shù)的發(fā)展;后續(xù)可通過(guò)豐富磁場(chǎng)數(shù)據(jù)測(cè)量手段,提高測(cè)量效率,以降低數(shù)據(jù)獲取的難度和復(fù)雜程度,提高地磁定位導(dǎo)航技術(shù)應(yīng)用的便利性.
猜你喜歡
當(dāng)代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂(lè)園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時(shí)刊(2020年13期)2020-09-25 08:21:42
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2020年1期)2020-02-20 13:22:30
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
中學(xué)生數(shù)理化·高二版(2016年12期)2017-02-28 10:08:42
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21