基于單片機直流大功率調速系統設計
2024-01-11 14:20:17蔡七林
時代汽車 2023年22期
蔡七林
摘 要:在信息化、智能化高速發展的時代,各大3C產線充分利用智能制造和自動控制技術,使企業產品高速、優質產出。特別是在自動化生產線中,調速系統的穩定性和效率決定了一個企業的生產效率和能否提供優質服務的一項重要保障。本設計是關于設計一套直流大功率調速系統用于舊流水線系統的升級改造。通過設計兩個部分來保障生產效能的提高:一部分是大功率直流開關電源,另一部分是自動控制器,最終成功改造給工廠提高50%生產效率,大幅度提高了公司的綜合競爭實力。
關鍵詞:直流大功率調速系統 電路設計 程序設計
1 緒論
1.1 課程設計背景及目的
隨著國家智能制造2025的發展號召的響應,越來越多的人投身到了智能制造產業中去。智能制造涉及到了機電控制方面的諸多內容,比如說機器人的應用、自動化生產線的應用、智能制造在3C行業中的應用等。決定其生產效率的主要是靠其調速系統的穩定性、可靠性及效率來決定的。
本設計是關于設計一套直流大功率調速系統用于舊流水線系統的升級改造。通過設計兩個部分來保障生產效能的提高:一部分是大功率直流開關電源,另一部分是自動控制器,最終成功改造給工廠提高50%生產效率,大幅度提高了公司的綜合競爭實力。
1.2 PID算法
PID算法是微機化控制的一部分,這種算法主要通過分析偏差的比例(P)、積分(I)和微分(D)之間的變化規律從而進行的調節控制的一種說短,根據首字母為了方便大家記憶把它稱為PID控制。通過試驗和實踐檢驗PID控制算法能夠適應很多工業應用場所。本文主要對模擬PID和數字PID進行舉例說明。
1.2.1 模擬PID
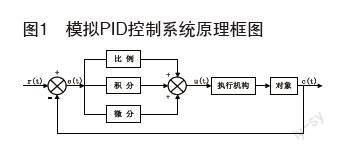
在模擬控制系統中,調節器最常用的控制規律是PID控制,常規PID控制系統原理框圖如圖1所示,系統由模擬PID調節器、執行機構及控制對象組成。
PID調節器是一種線性調節器,它根據給定值與實際輸出值構成的控制偏差:
=-? ? ? ? ? ? ? ? ? ? ? ?(1.1)
通過對PID三個影響因素進行監控和有機組合得出一定的控制規律,再根據的出的規律對控制對象進行一定的控制。通過一定的組合就得到了P調節器,PI調節器和PID調節器。
模擬PID調節器的控制規律為
(1.2)
其中,是比例系數,是積分時間常數,是微分時間常數。
簡單的說,PID調節器各校正環節的作用是:
(1)比例環節:主要是對控制系統的偏差進行監控并且把檢測結果進行反饋,根據反饋結產生抑制效果,從而達到減少偏差的變化,進一步提高系統的靈敏度。
(2)積分環節:主要是根據時間常數的變化來起作用,它與積分時間常熟成反比。
(3)微分環節:通過檢測偏差的變化頻率,在偏差信號未超出可控范圍之內,產生一個修正信號,及時精準對系統參數進行修正,從而提高修正效率,高效保證工作效率。
由式1.2可得,模擬PID調節器的傳遞函數為
(1.3)
本文的關注重點是在如何在實際應用過程中數字PID算法給工業應用中帶來便利和收獲,而模擬PID則關注的比較少,而且工業應用中這種模擬只在技術研發前期會用到,對一一般企業則融入較少,所以這里就對這兩種途徑進行一些描述。
1.2.2 數字PID
在DDC系統中,用計算機取代了模擬器件,控制規律的實現是由計算機軟件來完成的。因此,系統中數字控制的設計,實際上是計算機算法的設計。由于計算機只能識別數字量,不能對連續的控制算式直接進行運算,故在計算機控制系統中,首先必須對控制規律進行離散化的算法設計。通過電腦仿真軟件對控制規律進行計算,計算過程中采用數字化控制手段對電腦能夠識別的數字進行記錄和分析,再把結果進行仿真,但是由于電腦的局限性不能對連續的控制公式進行直接計算得出準確結果,鎖我我們要對得到的規律采用一種新的計算方法進行計算。把模擬控制的規律代入(1.2)進行離散化采樣數據,我們把圖1.1中、、、在第n次采樣時的到的數據分別記錄為、、、表示,所以式(1.1)就可以寫成 :
=-? ? ? ? ? ?? ? ? ? ? ?(1.4)
當采樣周期T很小時可以用T等效替換,可用等效替換,“積分”用“求和”等效替換,從而得到了等效的式子
(1.5)
(1.6)
通過進步計算,式(1.2)就可以離散化轉換為下面的差分方程
(1.7)
其中是偏差為零時得到初值,如果上式中的比例控制起主要作用,就把它稱為比例(P)項,即
(1.8)
如果是積分控制起主要作用作用,我們就把它稱為積分(I)項即
(1.9)
再如果說是微分控制起主要作用,我們就稱為微分(D)項即
(1.10)
這幾個模塊的功能都可以可單獨使用(但是一般情況下微分作用不做單列)或合并使用,比較常見的組合模式有:
P控制:? ? ? ? ? (1.11)
PI控制:
(1.12)
PD控制:
(1.13)
PID控制:
(1.14)
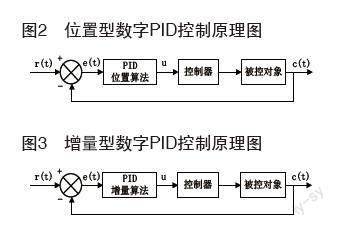
式(1.7)的輸出量為全量輸出,它對于被控對象的執行機構每次采樣時應達到的位置進行監測和控制,所以其的又稱為位置型PID算法。從上可以看出這種算式會給工作中造成很多麻煩,不僅要占用大量的內存還個程序的優化調整設置了很多障礙,所以我們必須對現有條件進行改造。
把u(n-1)帶入上式就可以得到
(1.15)
為了得到即得數字PID增量型控制算式將式(1.7)和式(1.15)相減得到了
(1.16)
最終化簡后的到數字PID位置型控制算式為
(1.17)
其中:比例增益;
積分系數;
微分系數[1]。
位置型和增量型數字PID控制的原理如下所示
1.3 設計要求
利用諧波半橋拓撲原理實現直流電源的輸出。整個電源要有整流、濾波、開關、變壓、整流、穩壓恒流、濾波幾個環節。
2 直流大功率調速系統總體設計過程
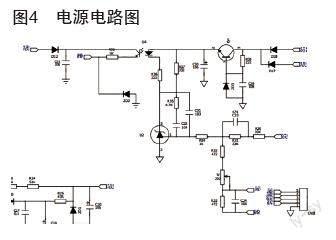
2.1 系統大功率直流開關電源硬件設計
本系統電源是一種將220V工頻交流電轉換成穩壓輸出的開關電源裝置,輸出功率300W,體積小功率密度高,我選擇受用美國NCP1396A作為電源管理器,利用諧波半橋拓撲原理實現交流變直流。開關電源系統需要整流模塊、濾波模塊、開關、變壓模塊、穩壓恒流模塊有效配合才能達到預期的目標。電源電路設計原理圖見下圖。
其中:
(1)整流電路:把交流電轉變成直流電。
(2)濾波電路:去除直流電路中的雜質,從而獲得純凈的直流電。
(3)開關電路:開關MOS管Q1、Q2通過IC的控制進行關斷或者導通。
(4)變壓電路:通過變壓器把高頻開關鎖存的能量傳遞到次級。
(5)整流電路:通過D12\13\14\15進行全橋整流。完成輸出端交直流轉化。
(6)穩壓恒流電路:通過TL431和RS1達到恒流穩壓的效果。
選擇電源變壓器
1)確定諧振周期fr=50KHz
Tr=2π
2)最小初級電壓
Vpmin=(0.6Vdcmin)/2
3)T1匝比的確認
Np/Ns=(0.6Vdcmin)/2*(Vo+2)
4)MOS管的電流平均值
I=2Ips/π*0.5+2Ips/4π*0.5
5)根據電流平均值計算次級的值
Ips=0.8*π*Io
Ipp=0.8*π*Io*Ns/Np
6)變壓器的電壓值
Vap=Vdcmin/2+0.6Vdcmin/2
7)首個諧振脈沖的峰值
Ipp=Vap/
即=Vdcmin*(Np/Ns)/π*Iodc
2.2 設計優勢及保障措施
(1)抗靜電及雷擊
隔離保護方法。這種方案實際上將瞬態高壓轉移到輸入端防雷單元上,由于隔離單元的防雷元器件和TVS瞬態吸能器件作為報告,不會產生損害性的浪涌電流,起到保護的作用。
(2)增加反射波干擾電信號,因為信號在傳輸過程中會通過電路中的中間元器件,利用這些元器件的自由特性,他們可以使傳輸信號在傳輸的時候存在一定的滯后性,這種滯后性的存在正好可以增加信號的傳輸時間,大大的降低噪聲對電路的影響。
(3)PCB板制作中主回路地和控制回路地的分隔,起到增加穩定性。
2.3 自動控制器設計
采用 STC12C5604單片機作為核心處理器控制器硬件采用光電隔離控制,確保控制信號不對電源產生干擾,從而保證了系統的穩定可靠性,硬件電路圖如下:
3 程序設計
為了滿足設計及控制要求。根據要求編寫相關控制程序。以下是部分軟件代碼:
void time0(void) interrupt 1
{
TR1=0;
CRT=!CRT;
if(POWER==0)
{
delaydata++;
if(delaydata==12000)
{
delaymin++;
delaydata=0;
if(delaymin==275)
{delayhour++; delaymin=0;}
if(delayhour==4)
{POWER=!POWER;delayhour=0;delaymin=0;delaydata=0;}
}
}
if(POWER==1||fcc)
{
so1=1;
TH0=0xfe ;
TL0=0x0c ;
}
else
{
TH0=H0 ;
TL0=L0 ;
TH1=H;
TL1=L;
so1=0;
TR1=1;
}
if (LEDDATA<10)
LEDDATA1=0;
else
LEDDATA1=LEDDATA/10;
if(POWER==1)
{LEDDATA2=0; LEDDATA1=0;}
else
LEDDATA2=LEDDATA;
if(CRT==0)
{LEDA1=0;LEDA2=1;P1=SEG7[LEDDATA1];}
if(CRT==1)
{LEDA1=1;LEDA2=0;P1=SEG7[LEDDATA2%10];LED=!fcen;}
}
void change()
{
if(keyen1==1)
{
while (PWM { PWM=PWM+SPEED; H=(65536-PWM)/256; L=(65536-PWM)%256; delay(CS); } } if(keyen2==1) { while (PWM>TEMP) { PWM=PWM-SPEED; H=(65536-PWM)/256; L=(65536-PWM)%256; delay(CS); } } } 4 系統調試方法及結果 本系統電源在220V/50HZ電壓條件下進行調試。具體調試測試點如下: (1)IC供電VCC測試:電源接入輸入電源和輸出負載后,用示波器測試IC供電電源是否穩定在15VDC。 (2)變壓器電流測試:采供繞線隔離電流測試方法,運行RUN,將隔離后的感應電流轉化成電壓后輸入示波器觀察,記錄開關頻率,電流峰值,正弦波平均幅值,確認在設計范圍內可行。 (3)輸出電壓測試:測試輸出電壓值,在24V穩壓輸出條件下,輸出電壓紋波值小于100mV。 (4)輸出電電流測試:測試輸出電流恒流穩定,在10A恒流輸出條件下,輸出電流紋波值小于50mA。 (5)輸出負載能力測試:在200W負載條件下,測試輸出帶載能力,保證輸出電流恒定。 (6)整機能效測試:在200W負載條件下,測試整機效率大于88%。 (7)控制器調試:人機設定進入智能模式,模擬傳感器進入觸發模式,測試系統是否可以智能調速,且在調速過程中無抖動現象。人機設定退出智能模式,人工按下按鍵,測試亮度調節過程是否正常且調節過程無抖動現象。 5 總結 本文針對自動化生產線中的調速系統的改造升級,設計設計一套直流大功率調速系統用于舊流水線體進行升級改造。通過設計兩個部分來保障生產效能的提高:一部分是大功率直流開關電源,另一部分是自動控制器。通過完成設計的調試得到如下結論: 1)為了提高生產效率,增強公司的綜合競爭實力,科學合理設定系統的大體設計方案。 2)對調速系統硬件及軟件進行系統設計。 3)對調速系統進行運行及調試,最終能滿足設計要求,為公司提高50%生產效率。 參考文獻: [1]賀令輝.電工儀表與測量.3版.一北京:中國電力出版社,2015.3(2016.5重印)“十二五”職業教育國家規劃教材ISBN 978-7-5123-6751-7. [2]張志良.電工與電子技術基礎.少學時.一北京.機械工業出版社、2017.1全國高等職業教育“十三五”規劃教材ISBN978-7-111-55779-1. [3]王廷才.變頻器原理及應用.-3版.一北京:機械工業出版社,2015.2(2015.2重印)普通高等教育“十一五”國家級規劃教材高等職業技術教育機電類專業規劃教材機械工業出版社精品教材ISBN 978-7-111-48488-2. [4]殷淑英.傳感器應用技術.一北京:冶金工業出版社,20087ISBN 978-7-5024-4684-0. [5]金明.電子測量技術/于寶明-2版—北京.高等教育出版社,2015.3ISBN 978-7-04-041679-4. [6]胡幸鳴.電機及拖動基礎一3版.一北京:機械工業出版社,2014.9(2015.8重印)“十二五”職業教育國家規劃教材普通高等教育“十一五”國家級規劃教材教育部高職高專規劃教材ISBN 978-7-111-47655-9. [7]張明海,王夕英.電工電子技術一北京:人民郵電出版社,2009.10中國職業技術教育學會科研項目優秀成果.高等職業教育“雙證課程”培養方案規劃教材.機電基礎課程系列ISBN 978-7-115-20560-5. [8]劉守義,楊宏麗.單片機應用技術.一3版.一西安:西安電子科技大學出版社,2013.8高職高專系列規劃教材ISBN978-7-5606-3114-1. [9]曹鳳.先進制造技術.-北京:科學出版社,2014(高等職業教育“十二五”規劃教材)ISBN 978-7-03-040174-8. [10]王莉,張欣.電工電子技術應用.一北京:科學出版社,2015(“十二五”職業教育國家規劃教材·經全國職業教育教材審定委員會審定·全國高等職業教育制造類專業系列規劃教材)ISBN 978-7-03-042982-7—CP1H系列性價比更優越[J].國內外機電一體化技術,2005(04):10-11.
