基于分布式系統(tǒng)的植保機(jī)智能與安全性能優(yōu)化
2024-01-11 07:55:32鄭思思
農(nóng)機(jī)化研究 2024年2期
康 華,鄭思思
(唐山科技職業(yè)技術(shù)學(xué)院,河北 唐山 063000)
0 引言
我國(guó)是農(nóng)業(yè)大國(guó),國(guó)家對(duì)于農(nóng)業(yè)的投入逐年增加,大大加快了農(nóng)業(yè)生產(chǎn)方式現(xiàn)代化的步伐,科技在農(nóng)業(yè)裝備中的作用也越來越大[1-3]。植保機(jī)是近年來發(fā)展起來的一種智能化和自動(dòng)化的農(nóng)業(yè)裝備,其采用無人駕駛的方式進(jìn)行灌溉、農(nóng)藥噴灑等工作,已經(jīng)得到越來越多的關(guān)注。植保機(jī)具有飛行控制簡(jiǎn)單有效、對(duì)作業(yè)地形要求較低等優(yōu)點(diǎn),不僅提高了作業(yè)效率,而且避免了農(nóng)藥對(duì)操作者身體的傷害[4]。當(dāng)前,一方面對(duì)于農(nóng)業(yè)綜合生產(chǎn)能力的要求不斷提高,需要植保機(jī)可進(jìn)行多功能的作業(yè)和自動(dòng)切換;另一方面,植保機(jī)在作業(yè)時(shí)搭載的藥箱較重,在飛行過程中無法保證其安全性能,還需要對(duì)植保機(jī)進(jìn)行智能優(yōu)化和安全性能的提升。
為此,研究人員將機(jī)器視覺、網(wǎng)絡(luò)信息等技術(shù)應(yīng)用于植保機(jī)的控制,在自動(dòng)導(dǎo)航和視覺定位等方面已有了較大的發(fā)展;同時(shí),可以從控制系統(tǒng)方面進(jìn)行智能優(yōu)化,即將通信和計(jì)算能力嵌入植保機(jī)內(nèi)部,通過反饋和控制過程實(shí)現(xiàn)對(duì)植保機(jī)的控制。這種控制方式可以有效提升植保機(jī)的自適應(yīng)能力和集成控制能力。對(duì)于安全性能方面,可以利用植保機(jī)的動(dòng)力學(xué)模型對(duì)其結(jié)構(gòu)進(jìn)行分析和優(yōu)化,從而提升其安全性能。隨著植保機(jī)獲取信息的增多,仍然存在對(duì)信息資源有效配置的問題。
目前,分布式系統(tǒng)是計(jì)算機(jī)信息處理的大趨勢(shì),通過采用多處理機(jī)系統(tǒng)結(jié)構(gòu)進(jìn)行任務(wù)的處理,以實(shí)現(xiàn)多任務(wù)執(zhí)行,有效提升任務(wù)的響應(yīng)速度以及任務(wù)執(zhí)行速率。因此,本文將基于分布式系統(tǒng)對(duì)植保機(jī)的智能和安全性能進(jìn)行優(yōu)化。
1 硬件設(shè)計(jì)
1.1 總體設(shè)計(jì)
植保機(jī)按照功能可以分為4部分,分別為機(jī)體、噴灑系統(tǒng)、控制單元、地面監(jiān)控站和供電系統(tǒng),總體結(jié)構(gòu)如圖1所示。這4個(gè)部分根據(jù)自身功能不同,分工協(xié)作,共同完成植保機(jī)的任務(wù)。

圖1 植保機(jī)總體設(shè)計(jì)結(jié)構(gòu)簡(jiǎn)圖Fig.1 The design structure diagram of plant protection machine
1.2 機(jī)體
植保機(jī)的機(jī)體部分是指飛機(jī)的機(jī)身骨架,作用為安裝和固定植保機(jī)的其他各系統(tǒng)。考慮到植保機(jī)在作業(yè)過程中需要搭載藥箱,且作業(yè)環(huán)境較為復(fù)雜,尤其在山區(qū)和丘陵地帶無法提供跑道,采用飛行方式簡(jiǎn)潔、易于控制的單旋翼無人機(jī)作為植保機(jī)進(jìn)行研究。一般植保機(jī)的機(jī)體主要由主旋翼系統(tǒng)、尾旋翼系統(tǒng)、發(fā)動(dòng)機(jī)、傳動(dòng)裝置和油箱組件等。
1.3 噴灑系統(tǒng)
噴灑系統(tǒng)通過利用飛控單元對(duì)獲取的GPS和相關(guān)農(nóng)田信息進(jìn)行分析,同時(shí)改進(jìn)傳統(tǒng)的噴藥方式,采用傳感器來控制噴灑系統(tǒng)的元器件實(shí)現(xiàn)變量噴藥。系統(tǒng)的主要組成包括藥箱、電磁閥、藥液泵、壓力和流量傳感器以及噴嘴等。改進(jìn)后的變量噴灑系統(tǒng)如圖2所示。

圖2 變量噴灑系統(tǒng)設(shè)計(jì)簡(jiǎn)圖Fig.2 The design diagram of variable spray system
作業(yè)前,飛控系統(tǒng)將GPS、農(nóng)作物病蟲害信息和數(shù)據(jù)分析處理結(jié)果傳遞至噴灑系統(tǒng),噴灑系統(tǒng)根據(jù)這些信息計(jì)算農(nóng)田各區(qū)域需要的噴藥量。作業(yè)過程中,電磁閥用于控制噴嘴開合的頻率,控制藥量的噴灑;同時(shí),藥品回流管處設(shè)置電磁閥,控制藥品輸送壓力;壓力傳感器和流量傳感器實(shí)時(shí)監(jiān)測(cè)管道內(nèi)的壓力和流量值,并實(shí)時(shí)反饋給ARM控制器進(jìn)行總噴灑藥量的調(diào)整。
1.4 飛控單元
飛控單元是植保機(jī)的控制單元,作用主要是為植保機(jī)的飛行和作業(yè)輸出正確的指令,實(shí)現(xiàn)植保機(jī)的智能控制,包括GPS定位、導(dǎo)航、遙控作業(yè)和變量噴藥等功能的控制。其主要組成包括ARM控制器、通信模塊、數(shù)據(jù)存儲(chǔ)模塊、姿態(tài)檢測(cè)模塊和軌跡檢測(cè)模塊。
ARM控制器是整個(gè)飛控單元的核心控制部分,用于實(shí)現(xiàn)對(duì)整個(gè)植保機(jī)運(yùn)動(dòng)的控制。為了提升植保機(jī)和網(wǎng)絡(luò)的耦合性,以及植保機(jī)的智能化程度,ARM控制器采用嵌入式系統(tǒng)[5],即以計(jì)算機(jī)技術(shù)作為基礎(chǔ),將軟件和硬件綜合在一起,以適應(yīng)植保機(jī)的應(yīng)用,同時(shí)還可涵蓋機(jī)械等一些附屬裝置。ARM控制器的硬件結(jié)構(gòu)如圖3所示。

圖3 ARM控制器硬件結(jié)構(gòu)圖Fig.3 The hardware structure diagram of ARM controller
通信模塊主要用于飛控單元與地面監(jiān)控站信息的傳遞,包括指令的接收傳達(dá)、飛行和作業(yè)狀態(tài)信息的傳遞,同時(shí)還對(duì)植保機(jī)的電量和動(dòng)力進(jìn)行實(shí)時(shí)監(jiān)控。為了減少設(shè)備的布線,同時(shí)提高信息傳輸效率,采用無線傳感網(wǎng)進(jìn)行信息的傳遞。
數(shù)據(jù)存儲(chǔ)模塊用于實(shí)時(shí)存儲(chǔ)植保機(jī)的相關(guān)信息,包括指令、飛行狀態(tài)及作業(yè)狀態(tài)等。
姿態(tài)檢測(cè)模塊主要采集植保機(jī)的飛行姿態(tài)信息,三軸加速度計(jì)用于測(cè)量飛行線速度,陀螺儀用于測(cè)量飛行角速度,電子羅盤用于測(cè)量飛行方向。因此,采用更便捷的、包含三軸加速度計(jì)和陀螺儀的MPU-6050慣組模塊來作為姿態(tài)檢測(cè)模塊。慣組模塊的原理如圖4所示。

圖4 慣組模塊原理圖Fig.4 The schematic diagram of inertial module
軌跡檢測(cè)模塊主要用于采集植保機(jī)的飛行航跡數(shù)據(jù),主要組成包括氣壓計(jì)和GPS。
1.5 地面監(jiān)控站
地面監(jiān)控站主要用于對(duì)植保機(jī)進(jìn)行遠(yuǎn)程的監(jiān)控和操控,還可設(shè)置人機(jī)界面對(duì)植保機(jī)進(jìn)行功能的切換、飛行參數(shù)和狀態(tài)的實(shí)時(shí)顯示。其主要組成包括數(shù)據(jù)傳輸系統(tǒng)、圖像傳輸系統(tǒng)、顯示屏和地面站。
1.6 供電系統(tǒng)
供電系統(tǒng)主要為植保機(jī)的正常運(yùn)行提供電力支持,使其能夠完成規(guī)定的指令和動(dòng)作。系統(tǒng)主要包括動(dòng)力電和飛控信號(hào)電,這兩部分電路采用獨(dú)立供電的方式。
2 分布式系統(tǒng)軟件設(shè)計(jì)
隨著任務(wù)的增多,如何有效、合理地將任務(wù)分配給不同區(qū)域的每個(gè)植保機(jī),使效率最高或代價(jià)最小,成為了新的問題。分布式系統(tǒng)由于具有分布性、并行性、透明性、共享性和健壯性,可作為植保機(jī)進(jìn)行任務(wù)分配時(shí)的首選。
多植保機(jī)的任務(wù)分配問題可以將植保機(jī)看作智能體代理,即替代智能體代理去執(zhí)行任務(wù)。智能體代理的內(nèi)部結(jié)構(gòu)如圖5所示。

圖5 智能體代理內(nèi)部結(jié)構(gòu)圖Fig.5 The internal structure diagram of agent
其中,學(xué)習(xí)模塊通過不斷的學(xué)習(xí)智能算法,將其進(jìn)行再學(xué)習(xí)后補(bǔ)充至知識(shí)庫(kù)[6]。目前,任務(wù)分配的智能方法主要有協(xié)商方法、空間鏈方法、群智能方法等。其中,使用最多、應(yīng)用最廣泛的是群智能方法中的克隆選擇算法。本文將采用人工免疫克隆選擇算法[7]對(duì)多植保機(jī)的任務(wù)分配問題進(jìn)行研究,步驟如圖6所示。

圖6 人工免疫算法進(jìn)行任務(wù)分配的步驟圖Fig.6 The step diagram of task assignment by artificial immune algorithm
1)首先,需要建立植保機(jī)的最終任務(wù),即植保機(jī)進(jìn)行作業(yè)時(shí)需要滿足效率最高、能耗最低的要求,則
maxf=Afm+bfn=Afm+B[1-k(fnm+fnn)]
其中,A和B分別為植保機(jī)任務(wù)執(zhí)行時(shí)的效益和代價(jià)系數(shù),A和B的和為1;k為調(diào)節(jié)因子。
植保機(jī)的目標(biāo)任務(wù)還包括任務(wù)的效益、執(zhí)行過程中的路程和威脅,表達(dá)式為

為了保證任務(wù)值在處理時(shí)最大值取值相同,目標(biāo)任務(wù)函數(shù)均進(jìn)行了歸一化處理。
為了保證植保機(jī)在進(jìn)行任務(wù)執(zhí)行時(shí),1個(gè)任務(wù)只被1個(gè)植保機(jī)訪問,且最終所有任務(wù)的效用最高,需要對(duì)目標(biāo)函數(shù)建立約束條件。首先,所有植保機(jī)在任務(wù)執(zhí)行過程中的飛行半徑需要小于或等于植保機(jī)的可飛行半徑Rs,約束條件為
2)其次,每架植保機(jī)的緊挨前序和后序任務(wù)只能有1個(gè),其約束函數(shù)為
3)對(duì)于已經(jīng)訪問的任務(wù),植保機(jī)不能再進(jìn)行訪問,其約束條件為
4)所有的任務(wù)均需要被植保機(jī)訪問,這也是最重要的約束條件,其約束函數(shù)為
將以上任務(wù)函數(shù)和約束條件輸入人工免疫算法系統(tǒng),即可得到植保機(jī)任務(wù)分配的最佳方式。
3 試驗(yàn)結(jié)果
考慮到本文主要針對(duì)植保機(jī)的多任務(wù)調(diào)度和智能性能進(jìn)行優(yōu)化改進(jìn),在進(jìn)行試驗(yàn)設(shè)計(jì)時(shí)主要進(jìn)行多任務(wù)調(diào)度試驗(yàn)和智能變量噴灑試驗(yàn)。
3.1 多任務(wù)分配試驗(yàn)
在進(jìn)行多任務(wù)分配試驗(yàn)時(shí),采用內(nèi)存為2GB的64位操作系統(tǒng)的計(jì)算機(jī)進(jìn)行仿真試驗(yàn)。設(shè)定植保機(jī)的停靠機(jī)場(chǎng)數(shù)量為3,每個(gè)機(jī)場(chǎng)包括2架植保機(jī),任務(wù)包括監(jiān)控、噴灑等共9個(gè)任務(wù)。為便于記錄,機(jī)場(chǎng)分別編號(hào)為F1、F2和F3,任務(wù)分別編號(hào)為A1、A2、A3、A4、A5和A6。將植保機(jī)的任務(wù)、數(shù)量以及距離等信息輸入系統(tǒng),采用人工免疫算法對(duì)任務(wù)進(jìn)行布置,仿真結(jié)果如表1所示。

表1 多任務(wù)分配試驗(yàn)仿真結(jié)果Table 1 The simulation result of multi task assignment experiment
由表1可知:該多任務(wù)分配系統(tǒng)可以用于植保機(jī)任務(wù)的分配,且運(yùn)算速度較快。
3.2 智能變量噴灑試驗(yàn)
為了驗(yàn)證該植保機(jī)是否可根據(jù)飛行速度的變量自動(dòng)調(diào)整噴藥量,保證噴藥壓力的穩(wěn)定,進(jìn)行了智能變量噴灑試驗(yàn)。選擇1塊500m×500m的試驗(yàn)田進(jìn)行噴灑試驗(yàn),噴灑液體為水。設(shè)定噴嘴壓力為1~2MPa,噴嘴最大流量為25~33L/min,調(diào)整植保機(jī)飛行速度分別為1、2、5、7m/s。每個(gè)飛行速度的時(shí)間為20s,時(shí)長(zhǎng)包括加速和勻速時(shí)間。記錄植保機(jī)在每個(gè)飛行速度的理論噴藥量和實(shí)際噴藥量,試驗(yàn)結(jié)果如表2所示。
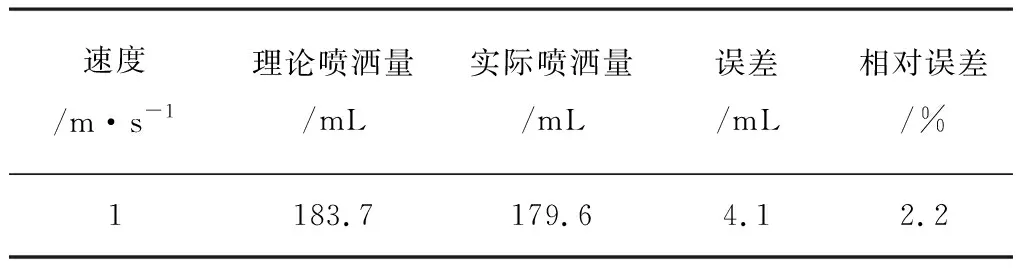
表2 智能變量噴灑試驗(yàn)結(jié)果Table 2 The result of intelligent variable spray test
由表2可知:在植保機(jī)作業(yè)過程中,藥量的噴灑可以根據(jù)飛行速度調(diào)整,實(shí)現(xiàn)了智能變量噴灑。
4 結(jié)論
1)針對(duì)植保機(jī)智能化程度和安全性能無法滿足要求及過多的信息資源造成植保機(jī)無法進(jìn)行合理的任務(wù)分配問題,基于分布式系統(tǒng)對(duì)植保機(jī)進(jìn)行了設(shè)計(jì),并對(duì)其智能和安全性能進(jìn)行優(yōu)化。
2)為了對(duì)多植保機(jī)進(jìn)行調(diào)度,解決多植保機(jī)的任務(wù)分配問題,對(duì)植保機(jī)的分布式系統(tǒng)進(jìn)行了設(shè)計(jì),建立了植保機(jī)的一對(duì)多的任務(wù)分配模型,并對(duì)模型進(jìn)行人工免疫算法設(shè)計(jì),以在較短的時(shí)間內(nèi)得到最優(yōu)的植保機(jī)任務(wù)分配方式。
3)為了驗(yàn)證植保機(jī)的性能,對(duì)植保機(jī)進(jìn)行了多任務(wù)分配試驗(yàn)和智能變量噴灑試驗(yàn),結(jié)果表明:植保機(jī)可根據(jù)飛行任務(wù)自動(dòng)調(diào)整噴藥量,實(shí)現(xiàn)了智能變量噴灑,且可快速地對(duì)植保機(jī)進(jìn)行任務(wù)分配。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08

- 農(nóng)機(jī)化研究的其它文章
- 拖拉機(jī)驅(qū)動(dòng)系統(tǒng)對(duì)其性能和油耗的影響及試驗(yàn)研究
- 基于PLC技術(shù)的聯(lián)合收割機(jī)電氣控制系統(tǒng)設(shè)計(jì)
- 基于無線網(wǎng)絡(luò)的農(nóng)產(chǎn)品冷鏈物流溫度監(jiān)測(cè)系統(tǒng)研究
- 小區(qū)播種機(jī)錐體投種器分種均勻性的試驗(yàn)研究
- 遠(yuǎn)射程噴霧機(jī)噴霧參數(shù)優(yōu)化與試驗(yàn)
- 果園風(fēng)送噴霧風(fēng)力調(diào)控試驗(yàn)臺(tái)設(shè)計(jì)及試驗(yàn)