粒子群算法在APU 轉子平衡工藝中的應用
2024-01-10 02:10:22王冰單煜峰徐長青中國南方航空股份有限公司沈陽維修基地
航空維修與工程 2023年12期
王冰 單煜峰 徐長青/中國南方航空股份有限公司沈陽維修基地
1 轉子組件動平衡分析
轉子組件是輔助動力裝置(APU)的核心部件,轉子組件的動平衡性能測試對于APU 的維修質量至關重要。APU 轉子轉速一般達到近50000r/min,良好的動平衡性能可以減少APU 的整機振動,降低軸承的動載荷,提高APU 的使用壽命,因此優化轉子組件的平衡工藝對降低航空公司的運行成本和提高維修車間的生產效率具有重要意義。
以某型APU 轉子為例,如圖1 所示,其結構為弧面端齒-中心拉桿結構,組件包括前軸承軸1、負載段葉輪2、拉桿3、中間軸4、動力段葉輪5、大聯軸器6、一級渦輪7、小聯軸器8、二級渦輪9、后軸承軸10、模擬軸承11、墊圈12、緊軸螺帽13。
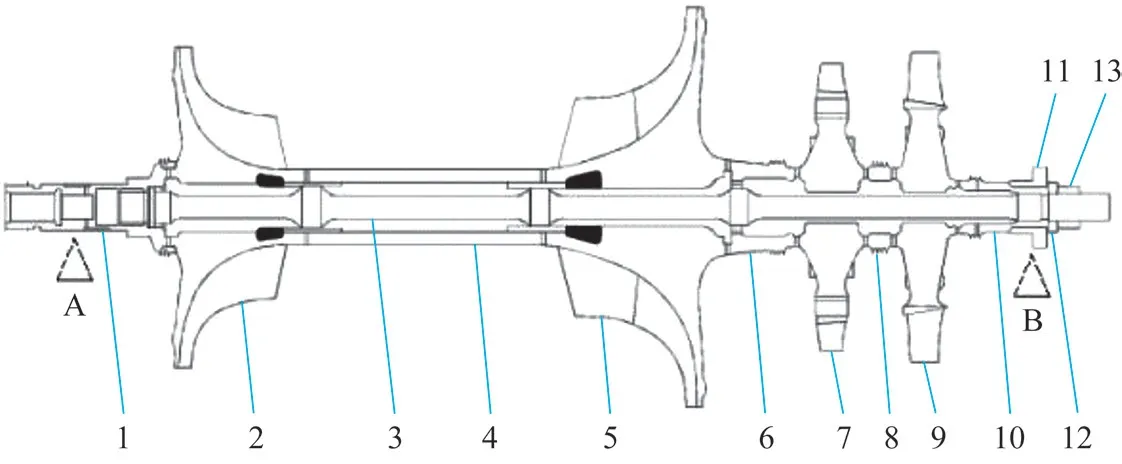
圖1 APU轉子結構
如圖2 所示,APU 轉子各部件之間通過弧面端齒結構實現嚙合連接,通過拉伸拉桿以緊軸螺帽拉緊固定,以此保證端齒嚙合處具有足夠的剛度。因此,可采用剛體軸動平衡測量方法完成APU轉子的動平衡測試工作。
依據APU 維修手冊,在裝配轉子時需限定兩個測量面(圖1 中A、B)處的剩余不平衡量。當剩余不平衡量超過標準時,不能通過材料去除的方法而只能通過各部件的重新組合來減小剩余的不平衡量。由于轉子本身具有足夠的剛性,各部件之間連接的端齒齒數固定,且剩余不平衡量本質上為一矢量型變量,因此轉子組件的剩余不平衡量可等效為各組成部分在兩個測量面處的剩余不平衡量的線性組合。由于轉子各部件在裝配后是剛性連接并以相同轉速旋轉,可以將旋轉坐標系作為基準坐標系,在該坐標系下進行分析,如圖3所示。
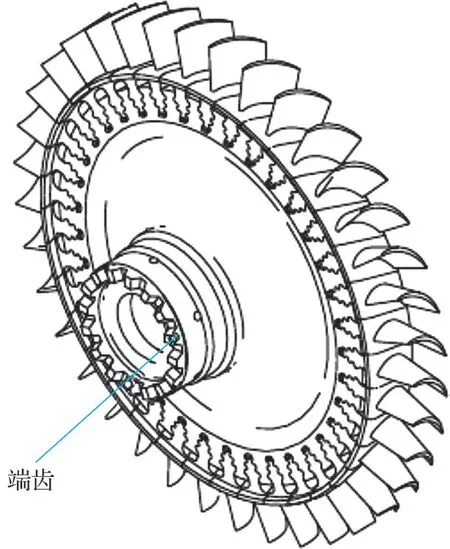
圖2 渦輪端齒
圖3 中坐標系X-O-Y為靜止坐標系,ζ-O-η為固定在轉子上的旋轉坐標系,該坐標系相對于靜止坐標系的旋轉速度ω即為轉子轉速。UZA、UZB為第Z個部件在測量面A、B處的剩余動態不平衡量,UA、UB為轉子組件在測量面A、B處的剩余動態不平衡量,由轉子各組成部件的剩余動態不平衡量的矢量線性組合而成,即:
由于動態剩余不平衡量U包含了不平衡量的大小和方向,即U為一矢量,為了簡化其表達與運算邏輯,在旋轉坐標系下對矢量U在復數域進行正交分解并以復數形式表示(見圖4)。
根據復數的定義,不平衡量U可表達為下式的復數形式:
根據歐拉公式,對不平衡量U可由復數形式建立復指數形式的表達方式,即:
為了得到每個部件的不平衡量UZ,可通過對該部件旋轉一定角度β,分別得到兩個位置時的轉子組件不平衡量U與U,并按下式得到該部件的不平衡量UZ。
通過建立復數形式與復指數形式的不平衡量表達式,可以將矢量計算過程中的復雜三角函數計算簡化為常規的復數加減運算及指數乘除運算,便于由計算機程序實現計算過程。
2 粒子群算法步驟
由于轉子組件中的部件較多,若以全排列方法尋求最優解,則本文所用轉子僅通過旋轉端齒并使用全排列方法求解的計算次數將達4×1010次。目前常見的優化算法包括粒子群算法、遺傳算法、蟻群算法、神經網絡算法、模擬退火算法等。由于存在兩個測量面,該問題又成為多目標優化問題。根據轉子組件平衡問題特點,本文選擇粒子群算法,該算法的優點是其路徑搜索過程利于避免局部最優問題,在計算機程序上的實現也更加容易,并易于完成不同型號APU 轉子的功能擴展。
粒子群算法通過設計一種無質量的粒子來模擬鳥群中的鳥,粒子僅具有速度和位置兩個屬性,速度代表移動的快慢,位置代表移動的方向。每個粒子在搜索空間中單獨搜尋最優解,將其記為當前個體極值,并將個體極值與整個粒子群里的其他粒子共享,找到最優的個體極值作為整個粒子群的當前全局最優解,粒子群中的所有粒子根據自己找到的當前個體極值和整個粒子群共享的當前全局最優解來調整自己的速度和位置。
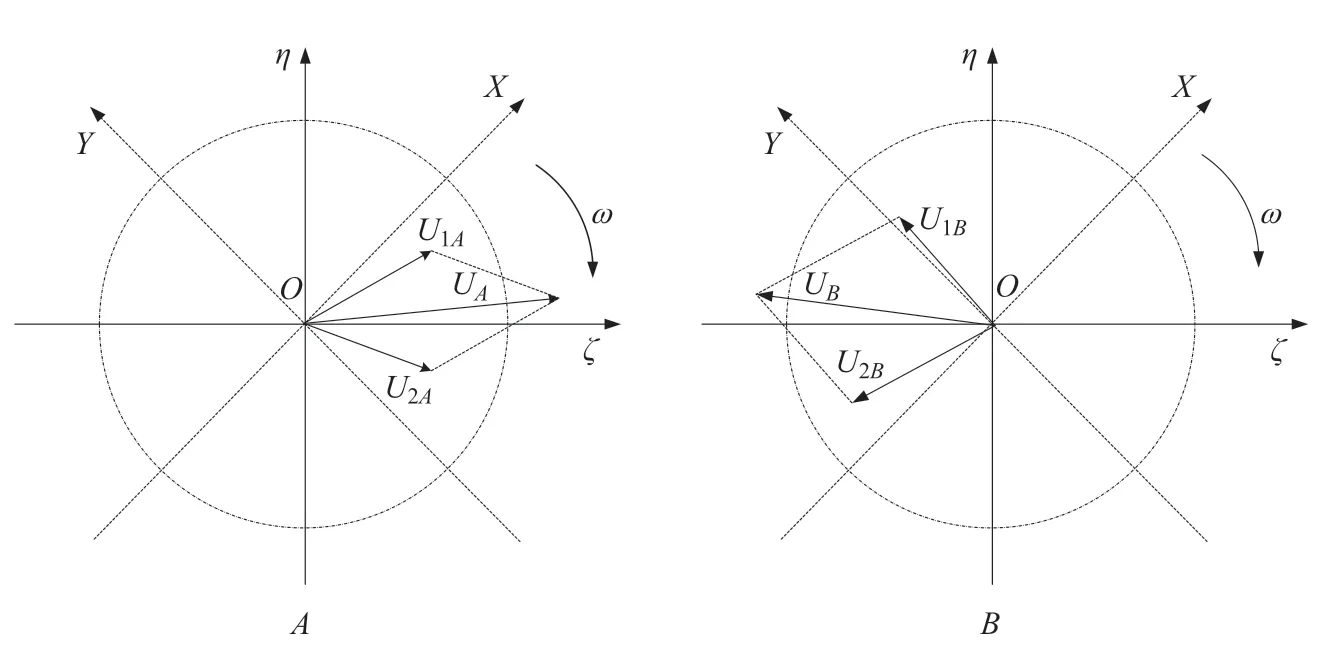
圖3 矢量合成示意圖
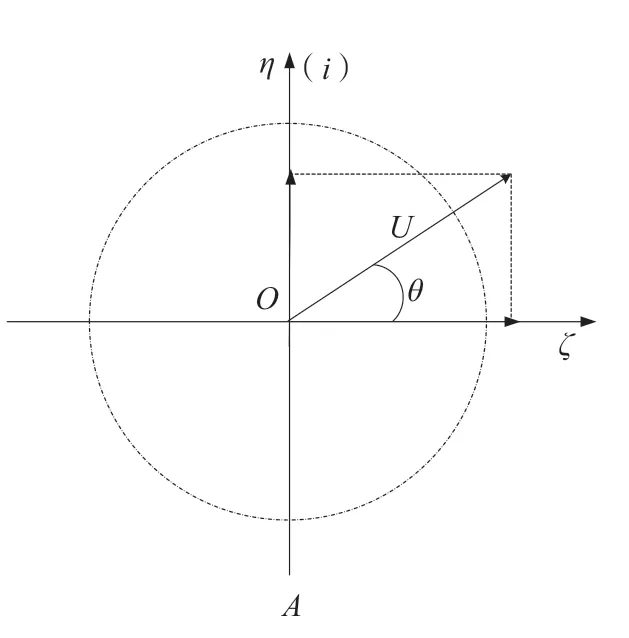
圖4 矢量的復數域分解
針對轉子平衡的工藝特點,將每個部件的安裝角度變量所構成的集合作為待求解粒子群。粒子群算法優化步驟包括:隨機初始化粒子群、計算適應度、更新粒子速度與位置、判斷終止條件,計算流程如圖5 所示。
1)隨機初始化粒子群
依據已知參數部件的個數N,建立各部件位置變量的集合作為待求解粒子群中的一個粒子,將多個粒子組合構建成為粒子群,對各變量在取值范圍內隨機初始化:
2)計算適應度
適應度函數是評價粒子群中每個粒子質量優劣的標準,在本例中適應度即為剩余不平衡量的大小。由于存在兩個測量面,且優化的目標之間存在耦合關系,因此取二者矢量的模求和作為適應度函數,同時對所組成的兩個適應度函數加以雙目標約束。
3)更新群體速度與位置
依據粒子群在尋優過程中所獲得的粒子歷史最佳位置Pbbeesstt與粒子群中所有粒子的歷史最佳位置Gbbeesstt,設置權重系數c1、c2、c3、α及隨機數r1、r2,對粒子群進行下一代更新。
4)判斷終止條件
粒子群算法的終止條件以設置迭代次數為標準,當達到所設置迭代次數時程序自動終止,此時的Gbest即為算法所求解。迭代程序結束后,將所得解與約束目標進行對比,判斷是否能求出所需解。
3 計算機仿真設計
依據上述理論基礎,結合APU 轉子平衡過程中的工藝特點,設計的程序流程如圖6 所示,包括參數表達式轉化、部件參數計算及組合優化計算三個模塊,具體表達如下。
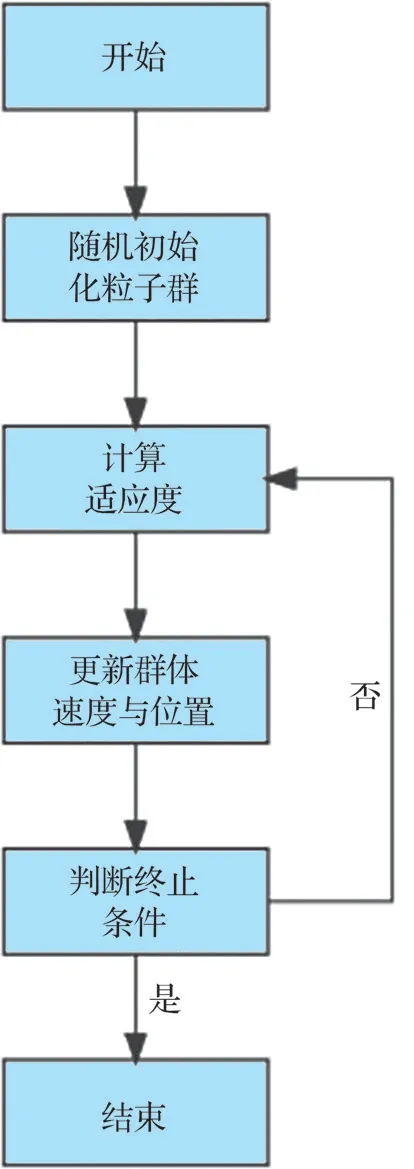
圖5 粒子群算法流程圖
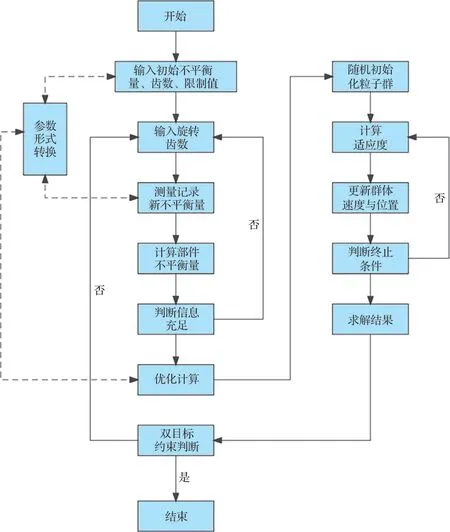
圖6 程序流程圖
1)參數表達式轉化:根據平衡機每次測量所得數據都為不平衡量大小|U|和所在角度θ的形式,可在輸入端將其直接輸入,在后臺將其參數表達為復指數形式進行變量傳遞,并在計算過程中轉化為復數形式進行計算。
2)部件參數計算:工作者在每次旋轉部件前,將剩余不平衡量輸入程序,旋轉部件重新組合后,記錄旋轉的端齒數,并再次啟動平衡機測量組合后的剩余不平衡量,將其輸入程序,通過計算可得到該部件自身的剩余不平衡量。
3)組合優化計算:根據輸入的原始不平衡量、端齒總數、A/B面限定值以及測試過程中得到的各部件動平衡參數,輸入后臺函數執行粒子群優化計算。

表1 測試及計算數據
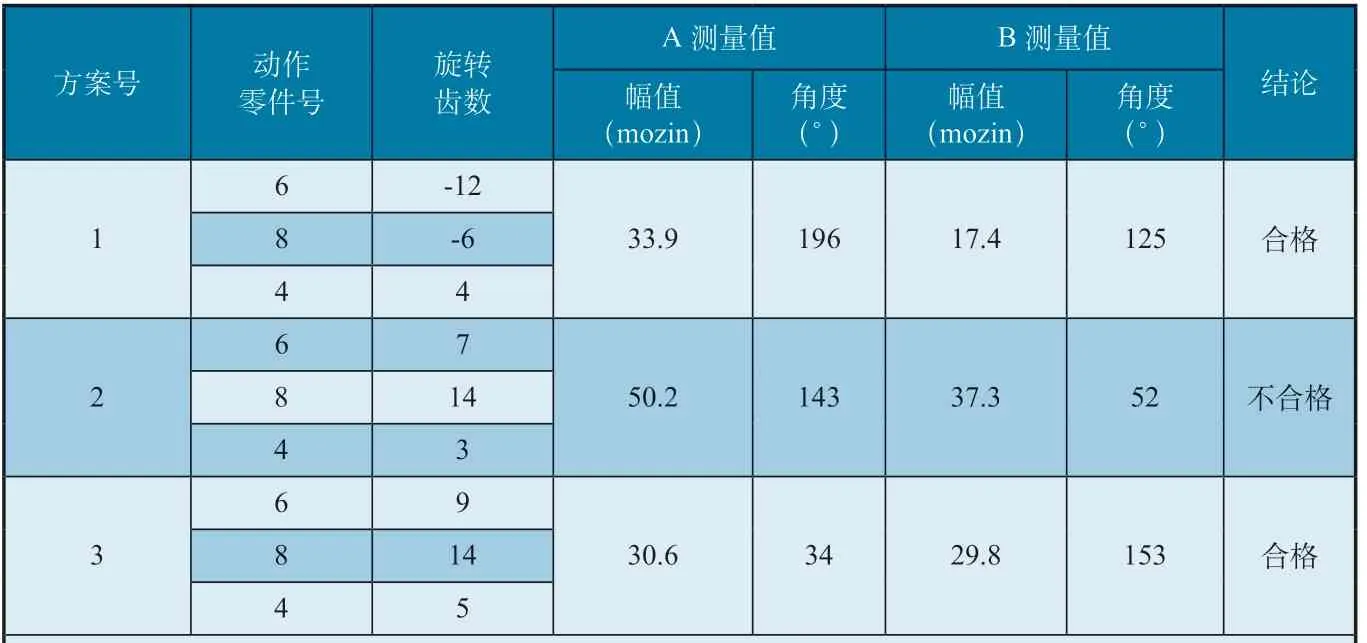
表2 計算結果及驗證
4 試驗驗證
依據維修手冊,將圖1 中轉子組件置于圖7 所示臥式平衡機上,各組成零件的端齒齒數都為20,依據維修手冊要求調整支撐間距,并設置兩測量面(左A、右B)剩余不平衡量限制值為35mozin 與50mozin,轉速設置為1000r/min,多次測試所得數據如表1 所示。經過程序計算,最終優化方案如表2 所示。
5 結論
針對APU 轉子動平衡工藝的特點及要求,提出了不平衡量的基于復數表達形式和復指數表達形式的矢量簡化模型,并以歐拉公式建立二者的聯系。通過粒子群法算對矢量模型的線性組合實現優化計算,編寫相應的計算機應用程序,有效提高了APU 轉子平衡工藝的質量與效率。
