基于可視化的果樹移栽機作業特性研究
2024-01-09 09:46:46李喆時底慧萍
農機化研究 2024年4期
關鍵詞:作業
李喆時,底慧萍,李 倩
(1.石家莊理工職業學院,石家莊 050228;2.石家莊財經職業學院,石家莊 050000;3.河北傳媒學院,石家莊 051430)
0 引言
隨著我國果品業的發展,水果種植面積和水果產量均已躍居世界第一[1]。移栽是水果栽種必不可少的環節,不僅可以有效避免水果幼苗遭受干旱、凍傷等,而且可以使幼苗良好地生長[2-3]。但是,目前我國的移栽作業主要采用人工或者半自動移栽機械設備完成,勞動強度大,移栽成活率低,亟需發展自動化移栽機械[4]。
為了提升果樹移栽機的機械化水平,我國加強了技術投入和技術創新,主要措施包括:研發能夠適應不同作業環境的果樹自動移栽機,以提升設備的使用效率;研發通用機架,增加設備的使用頻率,同時提高互換性;增加機械設備的多樣性,使其能夠實現制缽、育苗和移栽功能的有機結合。雖然移栽機的自動化水平得到了顯著提升,但在作業過程中由于無法準確地識別損壞的果樹苗以及待移栽果樹,導致移栽過程仍然需要進行人眼識別,移栽準確率和移栽效率無法達到要求。
機器視覺技術是近年來發展起來的一門學科,利用計算機模擬人的視覺功能,將光轉化為電信號,再利用成像技術對圖像進行處理,從而得到有用的信息并輸出。將機器視覺技術應用于自動果樹移栽機,可以有效替代人的作業過程,對損壞的果樹苗以及待移栽果樹進行識別[5],從而提高移栽效率和移栽成活率。
1 硬件設計
1.1 總體設計
果樹移栽機是在多功能果樹移栽機的基礎上,結合農業工作者要求研發的集松土、開溝、移栽和覆土于一體的新型果樹移栽機。果樹移栽機的主要組成包括控制系統、機器視覺和傳感器系統、旋耕裝置、開溝部件、覆土裝置、移栽裝置和傳輸系統。
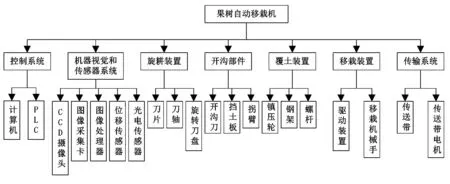
圖1 果樹自動移栽機的主要結構示意圖Fig.1 The main structure diagram of fruit tree automatic transplanting machie
1.2 控制系統
移栽機的控制系統主要包括計算機和PLC,用于對移栽機的整個作業過程進行控制,是移栽機實現自動化和智能化的軟硬件溝通平臺。計算機內部的控制軟件通過對其他系統的反饋信息進行分析,確定下一步動作指令并發送至PLC,進而控制相應系統動作執行,最終完成移栽任務。
1.3 機器視覺和傳感器系統
機器視覺和傳感器系統主要用于對果樹苗的位置和質量進行識別,以及時部分發現并剔除壞苗。其中,機器視覺系統主要包括CCD攝像頭、圖像采集卡和圖像處理器等部分。同時,在計算機內部搭配圖像處理軟件,通過算法利用圖像數據判斷壞苗,并利用位置傳感器確定壞苗位置信息,發送至控制系統;由控制系統發出指令,自動剔除壞苗[6]。機器視覺系統進行果樹苗識別的過程如圖2所示。
傳感器系統主要包括位移傳感器、光電傳感器等,用于識別和定位樹苗,保證移栽準確率。
1.4 旋耕裝置、開溝部件和覆土裝置
為了提升移栽機的功能性和自動化水平,在移栽機的基礎上增加了旋耕裝置和開溝部件,用于保證移栽時土壤的狀態適宜果樹苗的栽種。
旋耕裝置的組成主要包括刀片、刀盤和旋轉刀盤,用于將土壤充分地細碎。在作業時,旋轉刀盤在在動力的驅動下旋轉并前進,帶動刀軸切入土壤,切下的土塊拋起并與后方擋土板撞擊,使土塊進一步碎裂。
開溝部件的組成包括開溝刀、擋土板及拐臂,用于將旋耕裝置碎裂的土分向兩邊,其作業效果對果樹苗移栽起到了重要作用。開溝部件的結構簡圖如圖3所示。
覆土裝置用于在樹苗移栽完成后將樹苗表面的土壤進行覆壓,其作業效果會影響樹苗移栽后的成活率[7]。覆土裝置的主要組成包括鎮壓輪、鋼架和螺桿。
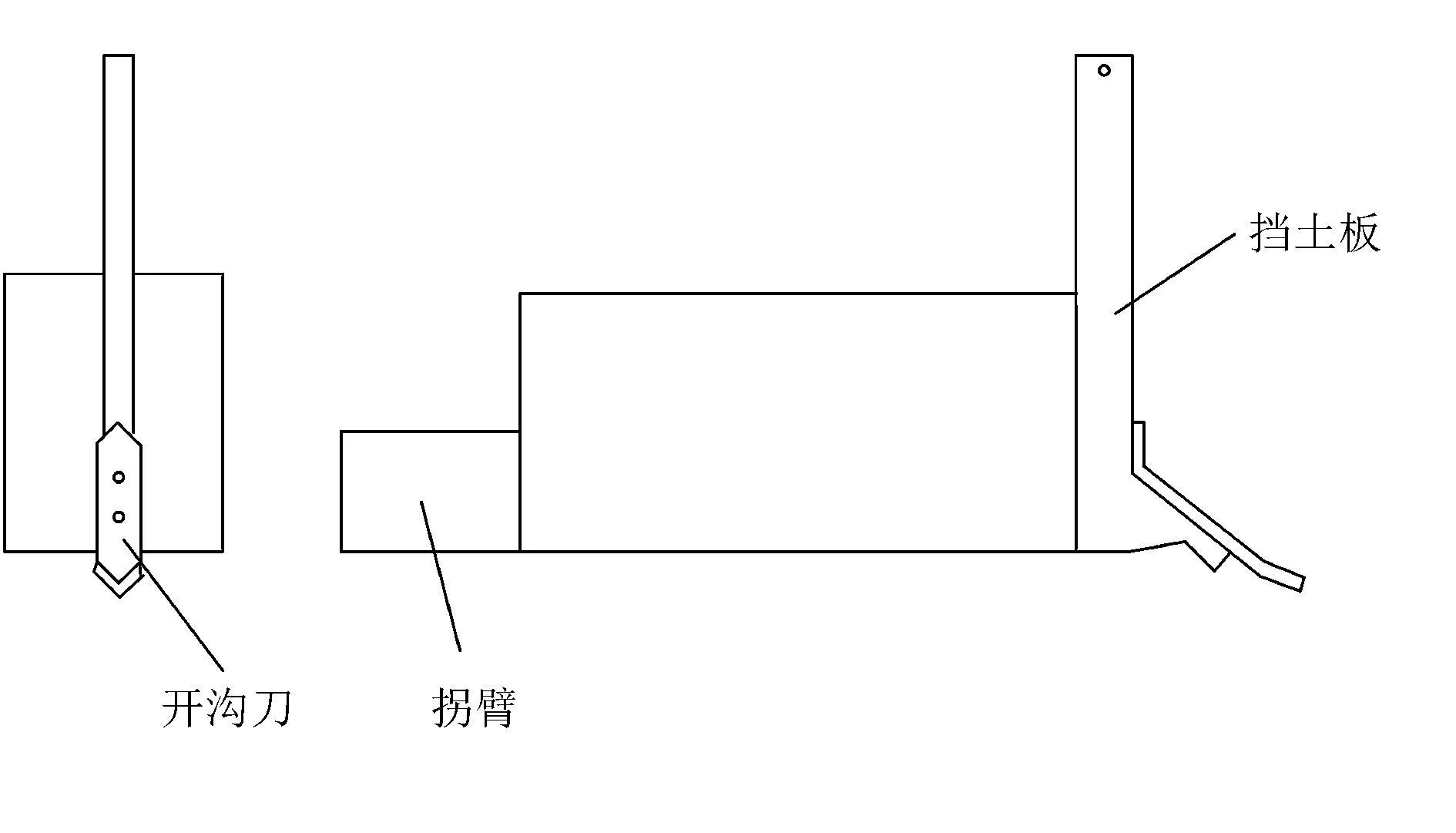
圖3 開溝部件結構簡圖Fig.3 The structural sketch of ditching component
1.5 移栽裝置
移栽裝置用于將樹苗夾取并移栽至種植區域,主要包括驅動裝置、步進電機、斜楔塊和移栽機械手。
1)驅動裝置主要用于驅動移栽機械手的運動。為了保證移栽機械手的位置精度和對速度的控制,采用步進電機驅動的方式控制。但是,這種驅動方式也增加了移栽機械手段的總質量,同時控制過程相對復雜。為了實現對機械手的控制,還應增裝絲杠和斜楔塊用于將動力傳遞給機械手。
2)移栽機械手采用4指扁平鏟狀手指的方式,可以保證機械手的結構穩定,同時抓苗穩定。設計時,手指的尺寸需要保證其在張開后大于穴盤中苗坨尺寸,同時小于穴孔尺寸。
3)斜楔塊用于在移栽機械手張開時撐開手指。
1.6 傳輸系統
傳輸系統的組成包括傳動帶和傳送帶電機,主要用于傳輸穴盤,其位置一般位于移栽裝置的下方,便于移栽裝置對樹苗的拔出和移植。
2 移栽作業特性研究
要實現果蔬移栽機的自動化運行,保證樹苗移栽的質量,主要需要解決兩方面的問題:一是移栽機械手的結構能夠適應不同樹苗的特性(如柔軟、不規則等),保證移栽過程不損壞樹苗;二是移栽前能夠準確地根據圖像確定是否存在壞苗,及時剔除。因此,主要針對以上兩方面對自動移栽機的作業特性進行研究。
2.1 移栽機械手幾何參數設計
移栽機械手的作業對象為樹苗,為了確定機械手的最優結構參數,關鍵是要分析其作業過程的運動軌跡和對樹苗的作用力。機械手在作業過程中,樹苗的受力如圖4所示。
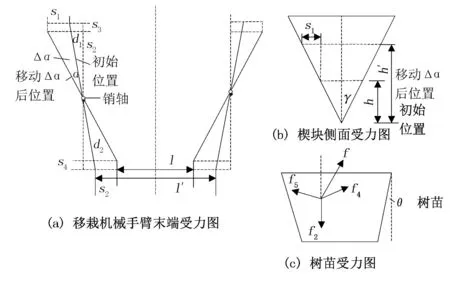
圖4 移栽機械手作業過程中樹苗的受力圖Fig.4 The force diagram of sapling in transplanting manipulator operation process
通過對圖4(a)分析可知:移栽機械手末端和前端在水平方向移動的距離s1和s2計算公式為
s1=d1sin(α+Δα)-d1sinα
s2=d2sin(α+Δα)-d2sinα
其中,d1和d2分別為移栽機械手末端和前端與銷子的距離;α和Δα分別為機械手初始進入樹苗的角度和手指繞銷子的角度。其中,Δα計算公式為
其中,h′和h分別為樹苗在作業結束和初始時的位置高度;γ為斜楔塊的下角角度。
移栽機械手末端和前端在豎直方西移動的距離s3和s4分別為
s3=d1cosα-d1cos(α+Δα)
s4=d2cosα-d2cos(α+Δα)
通過對圖6(b)進行分析,可以確定移栽機械手的末端在水平方向移動距離s1還可通過下式表示,即
機械手閉合時,前端間距l計算公式為
l=l′-2s2=l′-2[d2sin(α+Δα)-d2sinα]
其中,l′為機械手前端的初始間距。
移栽機械手從放下樹苗的狀態到閉合狀態需要的脈沖數量pn計算公式為
其中,p為絲杠可運動距離;b為單位距離步進電機旋轉角度。
移栽機械手與樹苗之間的摩擦力f計算公式為
f=f1+f2=μ(f3S+f4)
其中,f1為土壤自身滑移產生的摩擦力;f2為土壤自身粘結力產生的摩擦力;f3為樹苗受到的粘結力;f4為移栽機械手在法向方向受到的力;S為樹苗的面積;μ為摩擦因數。
由于土壤與樹苗之間的粘附面積較小,因此土壤自身滑移產生的摩擦力可忽略不計。由此可以確定移栽機械手對樹苗的作用力在水平和垂直方向的平衡方程為
f5cosθ+μf4sinα=f4cosα
f5sinθ+f4sinα+fcosα=f3
對其求解可以得到移栽機械手受到的法向力f4、樹苗栽植穴孔對樹苗的力f5、樹苗與移栽機械手之間的摩擦力f分別為
2.2 作業圖像處理過程設計
為了根據圖像信息剔除壞苗,需要對采集的圖像采用形態學圖像處理方法對圖像處理,使其能夠真實地反映樹苗真實的根系殘缺或外漏程度。采用形態學圖像處理方法對圖像處理的公式為
M′={[(M⊕N1⊕N2)°O·S]?T}°R
按照式中的要求,需要對圖像M進行以下處理:
1)將灰度化處理后的圖像M進行N1的膨脹操作,使圖像的邊緣處連續;
2)對圖像進行第2次的膨脹操作N2,去除圖像中的“空洞;
3)對圖像進行O開運算,使圖像變得平滑;
4)進行S閉運算操作,以去除移栽機械手和樹苗的突出部分,提高樹苗檢測的準確率;
5)進行T腐蝕處理,將膨脹處理區域進行放大,恢復圖像面積;
6)對圖像進行R開運算,消除圖像細小部分,使圖像更為平滑。
3 試驗結果
為了驗證該果樹移栽機的性能,需要對其進行試驗驗證。考慮到該移栽機主要對其移栽機械手的結構和圖像的壞苗識別進行了優化,因此試驗設計時主要進行樹苗的移栽試驗和基于機器視覺的壞苗識別試驗。
3.1 機器視覺識別壞苗試驗
試驗對象為蘋果幼苗,長度約為50~58cm。隨機選取蘋果幼苗30株,首先使用人工方式確認壞苗數量,再使用果樹移栽機的機器視覺功能進行壞苗識別,自動剔除壞苗。試驗其進行4次,結果如表1所示。
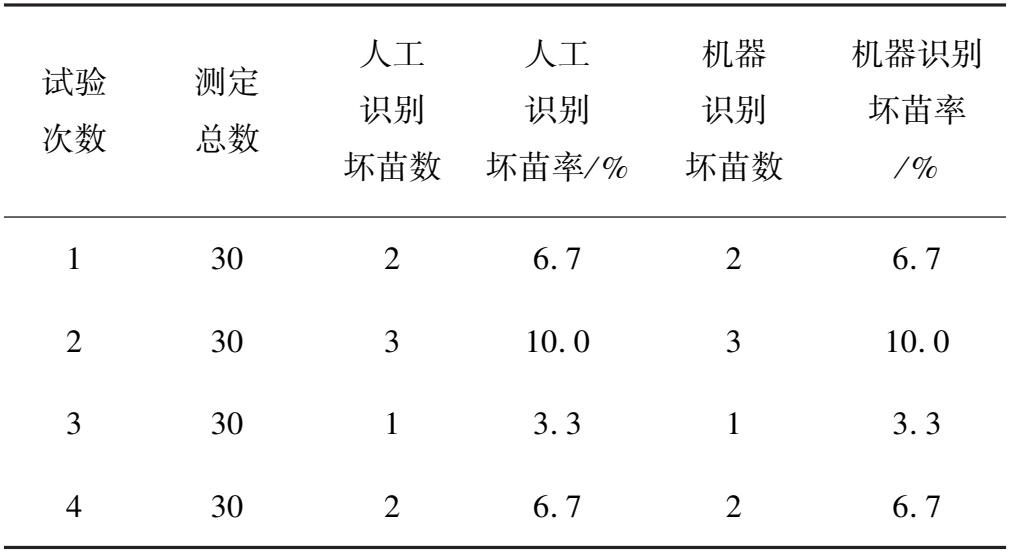
表1 機器視覺識別壞苗試驗結果
由表1可知:果樹移栽機的識別結果與人工識別結果一致,可有效識別壞苗,并將其從樹苗中剔除。
3.2 樹苗移栽試驗
樹苗移栽試驗的地點選取為石家莊市內的大棚內,將蘋果幼苗移栽至較為柔軟的濕潤砂質土壤中,入土深度約為20~26cm。試驗結果以移栽成功率、倒伏率、深度合格率和傷苗率作為移栽性能指標。選取已通過機器視覺識別的質量合格的蘋果樹苗進行試驗,共進行4次,每次移栽數量為50株。試驗結果如表2所示。
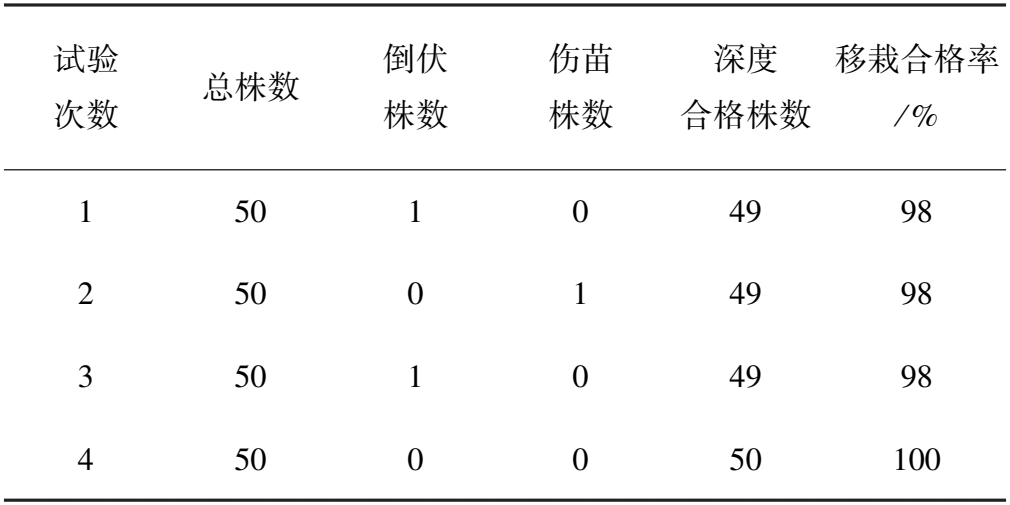
表2 樹苗移栽試驗結果
由表2可知,該樹苗移栽試驗的移栽成功率均大于98%,符合果農對于果樹移栽機的性能要求。
4 結論
1)針對我國的自動果樹移栽機的移栽準確率和移栽效率較低的問題,本文基于可視化技術對果樹移栽機的作業特性進行研究。該果樹移栽機的主要組成包括控制系統、機器視覺和傳感器系統、旋耕裝置、開溝部件、覆土裝置、移栽裝置和傳輸系統。
2)為了實現果樹移栽機的自動化運行,保證移栽質量,本文針對移栽機械手的結構進行了優化,使其能夠適應不同的幼苗,并對其作業特性進行研究。同時,對移栽作業的圖像處理過程進行了設計,使其能夠有效識別壞苗并剔除。
3)為了驗證該果樹移栽機的性能,對其進行了壞苗識別試驗和樹苗移栽試驗,試驗結果表明該果樹移栽機可以有效地識別壞苗,并且高質量地完成樹苗移栽。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
