履帶式果園作業平臺結構穩定性分析與研究
2024-01-09 09:46:14劉偉起劉洪杰李建平王鵬飛
農機化研究 2024年4期
劉偉起,劉洪杰,史 璐,楊 欣,李建平,王鵬飛
(河北農業大學 機電工程學院,河北 保定 071000)
0 引言
隨著現代農產業的發展,我國果園正朝著以丘陵山地矮砧密植種植模式為主的方向發展,但由于丘陵山地果園的地勢崎嶇不平造成從業者在水果的疏花疏果、剪枝、收獲、套袋等一系列作業方面存在困難。然而,傳統的靠著從業者腳蹬手爬的作業方式,不僅作業效率低下,而且安全性難以得到保障。查閱文獻根據記錄顯示,截至2007年國內水果的總種植面積已經達到了10471.3khm2。其中,蘋果的種植面積約占1961.8khm2,矮砧密植的現代蘋果園種植模式得到迅速推廣[1],但果樹修剪整枝、疏花疏果、套袋、收獲等作業人工操作仍存在難題[2-3]。隨著科技的發展,高空作業平臺逐漸在果園得到廣泛應用,其安全性和穩定性是從業者工作過程中極其重要的因素。丘陵山地果園多用履帶式作業平臺,因為履帶與地面的接觸面積大,則對履帶式果園作業平臺的結構穩定性分析與研究非常重要,不僅能夠提高果園的機械化水平,而且可以提高工作效率[4]。
果園作業平臺大致分為3類,即自走式、自走履帶式和懸掛折臂式。由于丘陵山地的矮砧密植果園地勢崎嶇不平,履帶式果園作業平臺不僅能夠實現空間平面內任意角度位置的作業而且機動性非常強[5]。履帶式果園作業平臺的穩定性是從業者工作過程中重要的因素之一,穩定性指從業者工作過程中不發生傾翻和滑移的現象[6],故丘陵山地矮砧密植果園的結構穩定性分析與研究對從業者工作過程具有顯著意義[6]。履帶式果園作業平臺穩定性指的是履帶式果園作業平臺能否在丘陵山地矮砧密植果園順利完成工作和從業者能否安全行駛[7],其安全穩定性分析有縱向結構穩定性分析和橫向結構穩定性分析兩種,縱向、橫向結構穩定性是衡量從業者工作安全性的重要標志。履帶式果園作業平臺穩定性越好,從業者在操作過程中的風險系數越小,安全性及工作效率越高。因此,本文應用理論力學與工程力學受力分析知識對履帶式果園作業平臺縱向及橫向坡道上行駛的結構穩定性問題進行深入分析,研究影響履帶式果園作業平臺結構穩定性的重要因素。
根據丘陵山地矮砧密植果園地形及地勢的特征,對履帶式果園作業平臺結構穩定性進行分析與研究,能夠保障作業者果園作業疏花疏果、剪枝、收獲、套袋等一系列作業的安全性與穩定性[8],不僅能夠提高果園的機械化水平,而且能夠提高果實采摘效率,增加果園的經濟效益。
1 作業平臺坡面行駛穩定性力學分析與研究
1.1 坡面行駛縱向傾翻和縱向滑移現象
履帶式果園作業平臺的縱向穩定性指的是履帶式果園作業平臺行駛工作過程中不發生縱向傾翻或縱向滑移的現象。縱向傾翻指的是履帶式果園作業平臺在坡面行駛時出現繞履帶支撐面前后邊緣發生傾翻的情況;縱向滑移指的是履帶式果園作業平臺坡面行駛時出現向后滑移的現象[9]。假設工作臺升降過程中整機在坡面上處于靜止狀態,對履帶式果園作業平臺的穩定性進行受力分析。
1.2 作業平臺上坡過程中的縱向穩定性分析
履帶式果園作業平臺上坡過程中作用力包括作業平臺的重力G1、坡面對履帶的支撐力FN、作業平臺的拉力PL、坡面對履帶的摩擦力Pf以及空氣阻力(與果園作業平臺方向相反)。理論上,上坡時速度很小,空氣阻力也較小,可忽略不計。平臺行駛速度為V,作業平臺載重為G,平臺重心距離坡面的垂直高度為h,平臺載重中心距離履帶大輪中心的垂直距離為H,履帶與地面的接觸長度為L。假設上坡角度為α,從動輪端支重輪中心與支撐力FN垂直于坡面的距離為C,主動輪端支重輪中心與平臺質心垂直于坡面的距離為D,簡化后的受力狀況如圖1所示。
圖1 履帶式果園作業平臺上坡時的受力簡圖Fig.1 Stress diagram of crawler orchard operation platform when going uphill
圖1中,G1為作業平臺的重力(N);FN為坡面對履帶的支撐力(N);PL為作業平臺的拉力(N);Pf為坡面對履帶的摩擦力(N);V為平臺行駛速度(km/h);G為作業平臺載重(N);h為平臺重心距離坡面的垂直高度(m);α為上坡角度(°);H為平臺載重中心距離履帶大輪中心的垂直距離(m);L為履帶與地面的接觸長度(m);C為從動輪端支重輪中心與支撐力FN垂直于坡面的距離(m);D為主動輪端支重輪中心與平臺質心垂直于坡面的距離(m)。
根據受力分析與研究,由力矩平衡方程可得
∑MA=0
(1)
則
Gcosα(L-D)-Ghsinα+G1cosα(L-D)-G1sinα(H+h)-FNC=0
(2)
由此可得
由圖1可知:在坡面角度α逐漸增大的過程中,坡面對履帶的支撐力FN會逐漸向后滑移與A點接近;當履帶的支撐力FN與A點接觸時,履帶式果園作業平臺將會發生傾翻現象。由此得知,履帶式果園作業平臺上坡過程中防止發生傾翻的條件為C≥0,則

通過履帶式果園作業平臺上坡過程中的縱向穩定性分析與研究分析得知:①平臺縱向在坡面過程中的傾翻角的取值范圍;②當坡面角度固定時,履帶式果園作業平臺在上坡過程中的縱向穩定性取決于L、H、h、G、G1、FN、D相關參數的取值。
1.3 作業平臺下坡過程中的縱向穩定性分析
履帶式果園作業平臺下坡過程中作用力包括作業平臺的重力G1、坡面對履帶的支撐力FN、作業平臺的拉力PL、坡面對履帶的摩擦力Pf以及空氣阻力(與果園作業平臺方向相反)。理論上,下坡是掛擋行駛,但是大多會處于制動狀態,制動力Pr大于拉力PL,故按照等速直線運動分析,忽略履帶所受的空氣阻力。平臺行駛速度為V,作業平臺載重為G,平臺重心距離坡面的垂直高度為h,平臺載重中心距離履帶大輪中心的垂直距離為H,履帶與地面的接觸長度為L。假設上坡角度為θ,從動輪端支重輪中心與平臺質心垂直于坡面的距離為b,從動輪端支重輪中心與支撐力FN垂直于坡面的距離為x,簡化后的受力狀況如圖2所示。
圖2中,G1為作業平臺的重力(N);FN為坡面對履帶的支撐力(N);PL為作業平臺的拉力(N);Pf為坡面對履帶的摩擦力(N);V為平臺行駛速度(km/h);G為作業平臺載重(N);h為平臺重心距離坡面的垂直高度(m);θ為上坡角度(°);Pr為制動力(N);H為平臺載重中心距離履帶大輪中心的垂直距離(m)。L為履帶與地面的接觸長度(m);b為從動輪端支重輪中心與平臺質心垂直于坡面的距離(m);x為從動輪端支重輪中心與支撐力FN垂直于坡面的距離(m)。
圖2 履帶式果園作業平臺下坡時的受力簡圖Fig.2 Stress diagram of crawler orchard operation platform when going downhill
根據受力分析與研究,由力矩平衡方程得
∑MF=0
(3)
則
FN(L-x)-Gcosθ(L-b)+Gsinθ(H+h)+G1sinθh-G1cosθ(L-b)=0
(4)
由此可得
由圖2可知:在坡面角度α逐漸增大的過程中,坡面對履帶的支撐力FN會逐漸向后滑移與F點接近,當履帶的支撐力FN與F點接觸時,履帶式果園作業平臺將會發生傾翻現象。因此,履帶式果園作業平臺下坡過程中防止發生傾翻的條件為x≤L。
因為
所以

通過履帶式果園作業平臺下坡過程中的縱向穩定性分析與研究分析得知:①平臺縱向在坡面過程中的傾翻角的取值范圍;②當坡面角度固定時,果園作業平臺在下坡過程中的縱向穩定性取決于L、b、H、h、G、G1、FN等相關參數的取值。
1.4 作業平臺橫向在坡面的穩定性分析
履帶式果園作業平臺的受力分析如圖3所示。作業平臺載重為G,履帶與地面的接觸寬度為b,兩履帶軌距之間的距離為Y,履帶式果園作業平臺質心與縱向對稱平面的距離為a,坡面對履帶的支撐力分別為FN1和FN2,坡面對履帶的摩擦力分別為Pf1和Pf2,坡面角度為α,履帶式果園作業平臺沿坡道上的慣性力為F。考慮履帶式果園作業平臺在坡面處于低、勻速行駛狀態,空氣阻力和慣性力很小,因此可以忽略不計[10]。
圖3 履帶式果園作業平臺橫向于坡面時的受力簡圖Fig.3 Stress diagram of crawler orchard operation platform when it is transverse to the slope
圖3中,G為作業平臺的載重(N);FN1、FN2為坡面對履帶的支撐力(N);b為履帶與地面的接觸寬度(m);Y為兩履帶軌距之間的距離(m);a為履帶式果園作業平臺質心與縱向對稱平面的距離(m);Pf1、Pf2為坡面對履帶的摩擦力(N);α為坡面角度(°)。
根據圖3,履帶式果園作業平臺在坡面的行駛狀態為低速、勻速,受到的空氣阻力以及慣性力非常小,可以忽略不計,故慣性力F=0。
根據受力分析與研究,力矩平衡方程為
(5)
(6)
由此可得
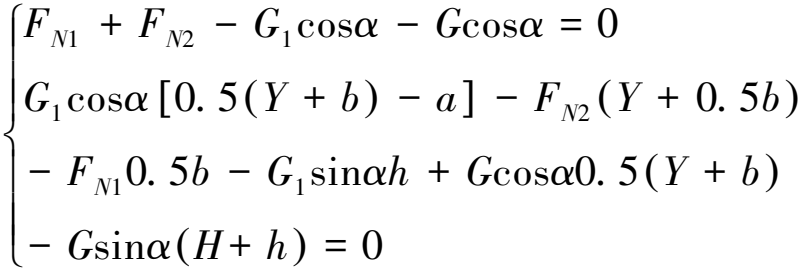
在坡面角度α逐漸增大的過程中,坡面對履帶的支撐力FN1、FN2會逐漸向后滑移與O點接近;當履帶的支撐力FN1、FN2與O點接觸時,履帶式果園作業平臺將會發生傾翻現象。由此得知,履帶式果園作業平臺橫向防止發生傾翻的條件為FN1≥0、FN2≥0,則

通過履帶式果園作業平臺橫向在坡面的穩定性分析與研究分析得知:①平臺橫向在坡面的傾翻角取值范圍;②當坡面角度固定時,履帶式果園作業平臺的橫向穩定性取決于Y、b、a、G、H、G1等相關參數的取值。
2 作業平臺穩定性安全裝置結構設計與工作原理
絕大多數果園主要以丘陵山地矮砧密植種植為主,穩定性安全裝置能夠保證果實采摘過程的穩定性以及安全性,能夠實現我國丘陵山地果園的疏花蔬果、套袋、修剪、采摘過程中的穩定性作業。
2.1 履帶式果園作業平臺的工作原理
升降裝置由液壓泵、液壓缸及剪叉桿等組成,電動履帶底盤內部安裝有液壓泵,液壓缸與液壓泵相連接;液壓缸兩端分別與履帶底盤上邊固定架及剪叉桿相連接,剪叉桿下部與履帶底盤相連接,上部與安裝有保護欄的工作平臺相連接;充電口安裝在履帶底盤的右后方位置,電能為果園作業平臺提供動力來源。通過控制箱連接有線路,連接到履帶底盤,履帶底盤左右前方兩端連接有電動機,電動機與線路相連接,電動機的輸出端與穩定性安全裝置轉動軸通過鍵連接;控制箱的上表面安裝有控制按鈕,當按下控制按鈕時,穩定性安全架能夠在電動機的驅動下轉動,不工作時安全架向上平行于保護欄;當采摘過程中平臺穩定后,穩定性安全架在控制按鈕操控下向下轉動到合適位置與地面接觸,能夠保證丘陵山地果園采摘在崎嶇不平的地形狀態下的安全性與穩定性。履帶式果園作業平臺穩定性安全裝置如圖4所示。
隨著我國國民經濟的快速發展以及現代工業的快速成長,氣體產品種類越來越豐富,氣體工業加速發展,加上世界制造業的調整,移動式壓力容器的裝備制造中心也正迅速崛起并向中國轉移。移動式壓力容器所具有的裝載量大、運輸手段靈活和運輸成本低廉的特點,逐步發展成為運輸工業氣體的主力,并在我國國民經濟發展過程中起著重要的作用。移動式壓力容器儲運的介質絕大多數都屬于易燃、易爆等有害液化氣體,如果引發安全事故,不僅造成財產損失,也容易污染環境甚至造成人員傷亡,社會影響極其惡劣。
2.2 履帶式果園作業平臺各結構功能
控制按鈕控制液壓系統及穩定性安全架的工作過程,拓展平臺可使果園作業平臺增大可利用空間并且加寬工作平臺的面積;電動履帶底盤用來提供動力來源,為工作平臺提供支撐;工作平臺能滿足不同高度操作者的使用需求;穩定性安全架能夠在控制裝置的操控下轉動,不工作時安全架向上平行于保護欄。當工作過程中平臺穩定后,穩定性安全架在控制裝置操控下向下轉動到合適位置與地面接觸,能夠保證丘陵山地果園采摘在崎嶇不平地形狀態下的安全性與穩定性。剪叉桿位移導軌槽是剪叉桿位移變化的導軌槽,能夠滿足工作過程中操作者不同工作高度的需求,剪叉桿在液壓缸的驅動下會根據操作者工作高度的需求而上下移動。
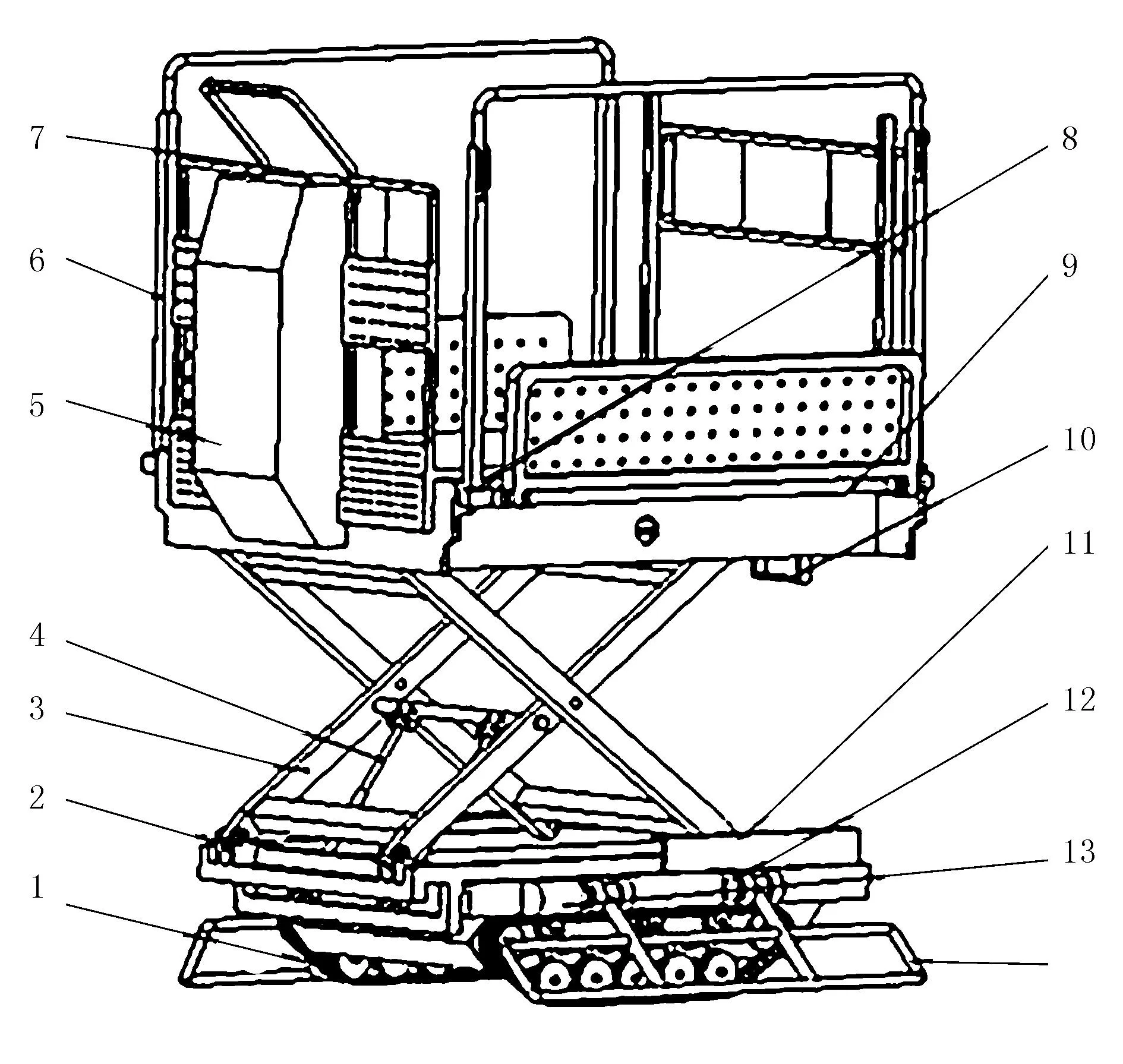
1.電動履帶底盤 2.剪叉桿轉動軸 3.剪叉桿 4.液壓缸 5.控制箱 6.保護欄 7.控制按鈕8.工作平臺 9.拓展平臺 10.腳踏 11.剪叉桿位移導軌槽 12.穩定性安全裝置轉動軸 13.電動機 14.穩定性安全架圖4 履帶式果園作業平臺穩定性安全裝置Fig.4 Stability safety device of crawler orchard operation platform
3 田間試驗
3.1 試驗條件
1)試驗地點:2021年10月30日,試驗在河北省保定市曲陽縣下河鄉劉家馬村進行,河北綠陽農業科技股份有限公司,東經114°41'30″,北緯38°40'10″,海拔150 m。
2)試驗所需設備:履帶式果園作業平臺,盒尺,秒表,手套,角度測量儀,A4紙和筆等。
3.2 試驗結果分析
1)履帶式果園作業平臺性能參數試驗。選取丘陵山地果園較為平整的地段進行測試,測得履帶式果園作業平臺無載重的行走速度,即低速約為0.352m/s,高速約為0.722m/s。履帶式果園作業平臺升降高度≤1.2m,最大承載負荷≤500kg,液壓桿升降速度為0.05m/s。
2)爬坡性能試驗。最大爬坡角度θ是指車輛(履帶式果園作業平臺)滿載時用最低擋位所能通過的最大坡度角[11-12],表征車輛(履帶式果園作業平臺)的爬坡能力,即
θ=arcsin[(F-∑f)/Gmax]
(7)
式中Gmax—滿載時履帶式果園作業平臺的載重(kN);
F—履帶式果園作業平臺履帶切線的牽引力(kN);
f—履帶式果園作業平臺的阻力(kN)。
在保證平臺穩定工作的狀態下,設置試驗坡面角度分別為8°、18°、30°,將300kg負載置于履帶式果園作業平臺中心,履帶式果園作業平臺縱向于坡面上,以低速擋順利行駛從坡面底端到頂端。爬坡性能測試如表1所示。

表1 爬坡性能試驗
由表1可知:隨著坡度角的逐漸增大,履帶式果園作業平臺行駛的時間逐漸變長,爬坡速度逐漸變得緩慢;在試驗過程中,履帶式果園作業平臺能夠正常運行,且正常行駛通過3種不同的坡度角;但是當行駛在30°坡面時,作業平臺速度變慢并且出現抖動,出現略微打滑現象。在正常運行的情況下,得知履帶式果園作業平臺能夠通過的最大坡度角為30°。
4 結論
1)對履帶式果園作業平臺進行坡面行駛穩定性力學分析與研究,通過計算得出作業平臺不傾翻的角度范圍。當坡面角度固定時,履帶式果園作業平臺的穩定性取決于相關性能參數的取值。
2)設計的履帶式果園作業平臺穩定性安全裝置能夠保證作業者工作順利進行,且可以幫助作業者順利完成果園疏花疏果、剪枝、收獲、套袋等一系列操作。
3)通過履帶式果園作業平臺性能參數試驗測得果園作業平臺無載重的行走速度,即低速約為0.352 m/s、高速約為0.722m/s。履帶式果園作業平臺升降高度≤1.2 m,最大承載負荷≤500kg,液壓桿升降速度為0.05 m/s。
4)通過爬坡性能試驗得知:隨著坡度角的逐漸增大,履帶式果園作業平臺行駛的時間逐漸變長,爬坡速度逐漸變得緩慢。在試驗過程中,履帶式果園作業平臺能夠正常運行,且正常行駛通過3種不同的坡度角。但是,當行駛在30°坡面時,作業平臺速度變慢并且出現抖動以及略微打滑現象。在工作正常運行的情況下,履帶式果園作業平臺能夠通過的最大坡度角為30°。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
故事大王(2016年7期)2016-09-22 17:30:08
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
兒童故事畫報(2013年3期)2013-06-24 05:40:30
