基于無人機(jī)傾斜攝影和三維激光掃描技術(shù)結(jié)合的古建測繪應(yīng)用研究
2024-01-08 10:42:28梁昭陽
城市勘測 2023年6期
梁昭陽
(福建船政交通職業(yè)學(xué)院 土木工程學(xué)院,福建 福州 350007)
0 引 言
中國有著光輝燦爛的歷史文化,而中國的古建藝術(shù)更是其中的典型代表,在長期的發(fā)展過程中不斷融合藝術(shù)和文化形成了獨(dú)特的建筑體系,中國的古建在藝術(shù)和技術(shù)上都達(dá)到了很高的水平,影響著世界建筑文化。古建作為一種文化精神的象征和載體,它們是歷史記憶的符號(hào)和社會(huì)文化發(fā)展的見證者,保護(hù)古建就是保護(hù)中國千百年的文化見證。古建和其他物質(zhì)文化遺產(chǎn)一樣,是中國社會(huì)漫長的發(fā)展史中保留下來的寶貴遺產(chǎn),是研究各歷史時(shí)期人民生產(chǎn)生活、民俗習(xí)慣、科技水平的重要載體[1]。中國古建大多以木質(zhì)材料為主,其本身的易腐敗易燃等特性,對(duì)保存的環(huán)境和技術(shù)要求極高,保護(hù)難度大,一旦發(fā)生損毀,無法挽回,對(duì)于其背后蘊(yùn)藏的文化研究價(jià)值損失更是無法估量,造成永久損失,不可逆。古建保護(hù)意義重大,傳統(tǒng)古建測繪工作主要以人工點(diǎn)位測量、距離測量、文字記錄等方式,簡單低效,且無法記錄完整信息,人工接觸式測量方式極易對(duì)古建造成破壞。隨著數(shù)字化建檔保護(hù)工作的提出,對(duì)古建測繪提出了更高的要求,如何快速、高效且非接觸式地對(duì)古建進(jìn)行測繪成為當(dāng)下急需解決的問題。
1 無人機(jī)傾斜攝影技術(shù)
基于航空攝影測量技術(shù)的三維建模是三維數(shù)字模型生產(chǎn)的重要手段之一,傳統(tǒng)的航空攝影測量必須使用大型有人飛機(jī)攜帶專業(yè)航攝相機(jī)采集垂直方向上的影像,也稱為垂直航空攝影,其嚴(yán)格的拍攝方向要求具有一定的局限性。無人機(jī)技術(shù)以其快速、便捷、靈活等優(yōu)勢(shì),逐漸發(fā)展出了傾斜攝影測量技術(shù),它改變了傳統(tǒng)攝影測量智能獲取垂直角度影像的局限性[2]。傾斜攝影測量技術(shù)能夠通過在同一個(gè)空中平臺(tái)搭載多個(gè)傳感器,同時(shí)獲得垂直、傾斜等不同角度影像信息,實(shí)現(xiàn)快速、高效獲取被攝物體的完整外部數(shù)據(jù)信息,提升建模效率和成本[3]。采用傾斜攝影測量技術(shù),不僅能夠可以獲取更加全面的地物紋理細(xì)節(jié),使得模型數(shù)據(jù)真實(shí)還原地物的自然紋理和色彩,更加真實(shí)地反映地物的實(shí)際情況,還能夠同時(shí)獲取地物的真實(shí)地理位置信息,精度達(dá)到厘米級(jí),極大地拓展了模型產(chǎn)品的應(yīng)用領(lǐng)域。無人機(jī)傾斜攝影測量系統(tǒng)主要由飛行平臺(tái)、任務(wù)設(shè)備、地面站等系統(tǒng)組成。其中飛行平臺(tái)常見以固定翼、多旋翼為主,任務(wù)荷載部分可根據(jù)任務(wù)需求進(jìn)行調(diào)整,傾斜攝影測量搭載設(shè)備主要以航測單鏡頭、多鏡頭相機(jī)為主。
2 三維激光掃描技術(shù)
三維激光掃描技術(shù)是一種新型測繪技術(shù),它是測繪領(lǐng)域繼GPS技術(shù)之后的一次技術(shù)革命,促進(jìn)了傳統(tǒng)測量方式向更加現(xiàn)代、更加便利的方向發(fā)展。三維激光掃描技術(shù)又稱“實(shí)景復(fù)制技術(shù)”[4],其利用激光測距原理,采用高速激光掃描測量的方法,可大面積、高分辨率、快速地獲取物體表面各個(gè)點(diǎn)的(x.y.z)坐標(biāo)、反射率、(R.G.B)顏色等數(shù)據(jù)信息,可快速復(fù)建出1∶1真彩色三維點(diǎn)云模型。
掃描被測物體的三維坐標(biāo)可由下式解算[5]:
(1)
式中,θ、α分別為激光發(fā)射點(diǎn)在掃描坐標(biāo)系中的夾角,S為掃描測距距離。相比于傳統(tǒng)單點(diǎn)目標(biāo)測量手段,三維激光掃描儀作為一種非接觸式測量代表,其巨大優(yōu)勢(shì)就在于可以快速掃描被測物體,不需反射棱鏡即可直接獲得高精度的掃描點(diǎn)云數(shù)據(jù)。這樣一來可以高效地對(duì)真實(shí)世界進(jìn)行三維建模和虛擬重現(xiàn)。三維激光掃描系統(tǒng)主要由三維激光掃描儀、計(jì)算機(jī)、電源供應(yīng)系統(tǒng)、支架以及系統(tǒng)配套軟件構(gòu)成。近年來隨著技術(shù)的不斷發(fā)展,三維激光掃描儀逐漸向輕型化、便攜化發(fā)展,價(jià)格成本逐步降低,使得該技術(shù)在測繪行業(yè)得到了廣泛的發(fā)展和應(yīng)用。
3 空地一體化技術(shù)路線
無論是無人機(jī)傾斜攝影還是三維激光掃描技術(shù)都具有各自的優(yōu)勢(shì),但它們同樣存在缺點(diǎn),無人機(jī)傾斜攝影存在一定視角盲區(qū)且無法獲取內(nèi)部信息,三維激光掃描無法獲取建筑物頂部等一些高處視角的信息。在古建測繪中不僅要獲取建筑外部信息還要獲取建筑內(nèi)部結(jié)構(gòu)信息,同時(shí)古建通常具有豐富的紋理圖案和花紋以及復(fù)雜的結(jié)構(gòu),對(duì)于古建測繪無論是在精度上還是細(xì)節(jié)上提出了更高的要求,兩項(xiàng)技術(shù)在古建測繪中存在明顯不足。針對(duì)傾斜攝影和三維激光掃描的技術(shù)特點(diǎn),將兩個(gè)技術(shù)手段結(jié)合起來,利用無人機(jī)傾斜攝影進(jìn)行外部數(shù)據(jù)采集,三維激光進(jìn)行地面和內(nèi)部結(jié)構(gòu)的數(shù)據(jù)采集,以形成優(yōu)勢(shì)互補(bǔ),建立空地一體化的立體數(shù)據(jù)采集方法,具體技術(shù)路線如圖1所示。
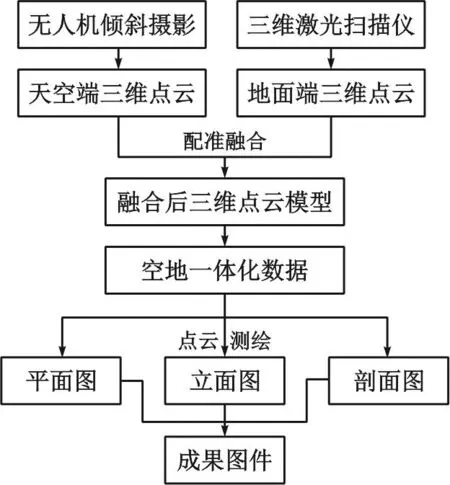
圖1 空地一體化技術(shù)路線圖
天空端通過無人機(jī)采用空中傾斜攝影測量方式,獲取建筑外部多視角影像,建立實(shí)景三維模型,地面端利用三維激光掃描技術(shù)進(jìn)行建筑內(nèi)部結(jié)構(gòu)掃描,獲取高密度三維點(diǎn)云數(shù)據(jù)。再利用數(shù)據(jù)融合技術(shù),對(duì)點(diǎn)云、影像數(shù)據(jù)進(jìn)行加工配準(zhǔn)融合,將空、地?cái)?shù)據(jù)一體化。然后,利用融合后的三維點(diǎn)云數(shù)據(jù),按照古建建檔繪制平面、立面、剖面圖的不同要求,對(duì)點(diǎn)云進(jìn)行不同角度和厚度的裁切,形成繪圖所需的基礎(chǔ)數(shù)據(jù)。最后,進(jìn)入繪圖程序,完成繪制古建建檔所需的各類立、平、剖面等圖件。
4 項(xiàng)目應(yīng)用分析
廈門擁有豐富的歷史文化資源,其中極具特色的紅磚建筑是閩南文化的典型代表,閩南紅磚建筑于2012年被列入我國世界遺產(chǎn)預(yù)備名錄。為了更好地做好歷史文化遺產(chǎn)保護(hù)和利用,數(shù)字化建檔工作勢(shì)在必行。基于此,選取紅磚古厝中的某處紅磚古建為對(duì)象,進(jìn)行數(shù)字化測繪建檔,采用無人機(jī)結(jié)合三維激光掃描儀空地一體化測繪方案,對(duì)該宗祠古建進(jìn)行數(shù)字化測繪,利用傾斜攝影和三維激光掃描技術(shù)無接觸測量方式,采集建筑內(nèi)外信息,完成古建數(shù)字化測繪工作。
4.1 傾斜影像數(shù)據(jù)獲取
在外業(yè)數(shù)據(jù)獲取工作中,本次空中端數(shù)據(jù)采集設(shè)備選用性能穩(wěn)定小巧靈活的大疆精靈Phantom 4 RTK無人機(jī)實(shí)施傾斜攝影測量。精靈Phantom 4 RTK是一款小型多旋翼高精度航測無人機(jī),面向低空攝影測量應(yīng)用,具備厘米級(jí)導(dǎo)航定位系統(tǒng)和高性能成像系統(tǒng)。在本次項(xiàng)目中,需要保證影像數(shù)據(jù)分辨率優(yōu)于 5 cm,滿足 1∶500數(shù)字線畫圖DLG及后續(xù)數(shù)據(jù)處理要求,根據(jù)飛行航高與GSD(地面影像分辨率)的基本關(guān)系,如公式(2)所示,可計(jì)算飛行最佳航高。
(2)
式中,H為飛行高度,f為鏡頭焦距,α為像元大小,GSD為影像的地面分辨率。本次使用的精靈Phantom 4 RTK無人機(jī)的f=8.8 mm,a=2.41 μm,實(shí)際作業(yè)時(shí)采用理論值一半左右進(jìn)行作業(yè),所以 1∶500作業(yè)采用GSD為2 cm/像素設(shè)計(jì)飛行高度。考慮到飛行環(huán)境因素及后續(xù)處理的精度損失,本次實(shí)際飛行航線高度設(shè)計(jì)為 60 m,保證能夠清晰采集到建筑的表面影像信息,外業(yè)數(shù)據(jù)采集時(shí)分別從四個(gè)不同方向采用傾斜攝影方式采集建筑物的影像信息,飛行速度采用默認(rèn)最大值即可。
4.2 三維點(diǎn)云數(shù)據(jù)獲取
在地面數(shù)據(jù)采集方面,采用Trimble X7影像三維激光掃描儀,它高度集成了三維激光掃描儀、近景攝影測量技術(shù),掃描速度高達(dá)500 kHZ,測程0.6~80 m,測距精度 2 mm,測角精度21″。內(nèi)置伺服驅(qū)動(dòng)EDM,多鏡頭影像、自動(dòng)校準(zhǔn)、自動(dòng)配準(zhǔn)技術(shù),具有自動(dòng)校準(zhǔn)功能,能同時(shí)對(duì)角度和距離作精確校準(zhǔn),確保成果的準(zhǔn)確性和可靠性,工作時(shí)能夠一鍵自動(dòng)完成校準(zhǔn)、整平、掃描、拍照、下載和配準(zhǔn),提升數(shù)據(jù)采集效率。為了確保掃描點(diǎn)云數(shù)據(jù)的完整和數(shù)據(jù)拼接,實(shí)際掃描過程中,掃描時(shí)需保證一定的重疊度,建議重疊率不低于30%,相鄰測站點(diǎn)確保距離在 5 m左右。根據(jù)紅磚建筑的結(jié)構(gòu)特點(diǎn)和內(nèi)部紋理細(xì)節(jié),為獲取完整的紋理信息,檐廊及各層樓道通廊處需增加測站進(jìn)行局部掃描,保證內(nèi)部斗拱和梁架等復(fù)雜結(jié)構(gòu)能夠完整采集和拼接。實(shí)際掃描時(shí)為了減少冗余數(shù)據(jù),提高采集數(shù)據(jù)效率,設(shè)置有效采集距離為 20 m,采用VISION 360掃描模式進(jìn)行掃描,快速獲取清晰的全視野全景彩色圖像和彩色點(diǎn)云,最大化獲取測站數(shù)據(jù)。
4.3 配準(zhǔn)融合
數(shù)據(jù)處理時(shí)需要先將空中端和地面端數(shù)據(jù)分開處理再進(jìn)行融合,首先是地面端,需先將無人機(jī)傾斜攝影數(shù)據(jù)導(dǎo)入DJI Terra軟件,進(jìn)行空三處理恢復(fù)像片位置和姿態(tài),再進(jìn)行密集匹配建模,生成稠密點(diǎn)云數(shù)據(jù)。地面端三維激光點(diǎn)云數(shù)據(jù)處理,將外業(yè)所測數(shù)據(jù)導(dǎo)入TBC軟件中進(jìn)行拼接,處理前先要對(duì)原始數(shù)據(jù)的齊全性、完整性和可用性進(jìn)行檢查,并確保每一測站之間存在公共點(diǎn)可以進(jìn)行配準(zhǔn)。其次,建立測站點(diǎn)云,利用公共重疊區(qū)域進(jìn)行測站注冊(cè)并配準(zhǔn),配準(zhǔn)時(shí)可結(jié)合特征點(diǎn)進(jìn)行手動(dòng)成對(duì)注冊(cè)和自動(dòng)相結(jié)合方式進(jìn)行,同時(shí)對(duì)配準(zhǔn)精度進(jìn)行檢測、目視檢測配準(zhǔn)效果。需要注意的是如果采用特征點(diǎn)成對(duì)注冊(cè)即手動(dòng)方式配準(zhǔn),要注意選取重疊度較高的區(qū)域進(jìn)行配準(zhǔn),一般情況下選取1對(duì)點(diǎn)即可完成配準(zhǔn),如果效果不佳,可增加至2對(duì)點(diǎn),再進(jìn)行適當(dāng)優(yōu)化,確保配準(zhǔn)效果,多數(shù)情況1~2對(duì)點(diǎn)即可實(shí)現(xiàn)配準(zhǔn)。最后,將傾斜攝影獲取的天空端稠密點(diǎn)云轉(zhuǎn)換為*.las格式與地面端三維激光掃描儀所獲取的三維激光點(diǎn)云利用天寶RealWorks點(diǎn)云處理軟件進(jìn)行數(shù)據(jù)融合,通過特征點(diǎn),將無人機(jī)影像提取的點(diǎn)云與掃描點(diǎn)云進(jìn)行配準(zhǔn),對(duì)屋頂?shù)鹊孛鎾呙枞笔Р糠诌M(jìn)行補(bǔ)充,形成完整的三維點(diǎn)云模型。經(jīng)過融合有效彌補(bǔ)了三維激光點(diǎn)云數(shù)據(jù)漏洞、拉花等現(xiàn)象,建立完整的古建點(diǎn)云模型,融合后前后對(duì)比如圖2所示。
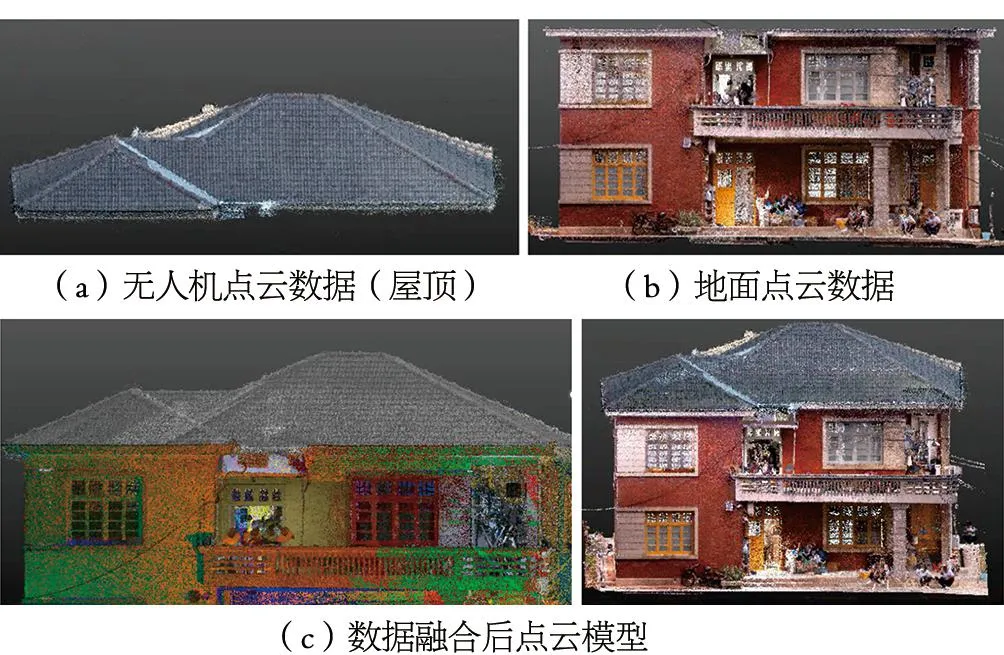
圖2 數(shù)據(jù)融合效果對(duì)比
4.4 建檔測繪與精度分析
(1)建檔測繪
經(jīng)過空地一體化融合后的點(diǎn)云數(shù)據(jù)完整記錄了古建信息,但往往數(shù)據(jù)成果量較大,如果整體直接加載用于繪圖對(duì)于計(jì)算機(jī)系統(tǒng)要求高,影響繪圖效率,不利于后期工作。根據(jù)古建建檔要求,需要繪制平面圖、里面圖、剖面圖等圖件。因此,為了提升繪圖效率和質(zhì)量,在繪圖前需要將融合后的點(diǎn)云成果利用RealWorks點(diǎn)云處理軟件點(diǎn)云切片功能進(jìn)行切片處理,對(duì)點(diǎn)云按照不同視角和樓層進(jìn)行一定厚度的裁切,并去除冗余點(diǎn)云和一些“飛點(diǎn)”,形成切片點(diǎn)云,裁切后能夠清晰確定和看清繪圖所需的門窗、柱、墻體、斗拱等構(gòu)件的位置、大小、厚度等信息即可。最后,利用CAD等繪圖軟件加載融合切片后的點(diǎn)云成果,再基于切片后點(diǎn)云進(jìn)行平面、剖面、立面圖的繪制,并對(duì)尺寸進(jìn)行標(biāo)注。針對(duì)部分精細(xì)紋理和結(jié)構(gòu)復(fù)雜部件存在單一依靠點(diǎn)云影像判斷存在困難的情況,在實(shí)際工作過程中,可結(jié)合無人機(jī)影像、現(xiàn)場照片等影像數(shù)據(jù)進(jìn)行判別。按照建筑中軸線切割分別繪制縱剖面圖和橫剖面圖,建筑物平面圖、建筑物立面圖,并對(duì)相關(guān)成果圖件進(jìn)行整飾,最終形成古建測繪成果圖件,如圖3所示。

圖3 古建成果圖
(2)精度分析
融合后的三維模型具備了真實(shí)位置信息,可對(duì)模型進(jìn)行尺寸精度驗(yàn)證,采用人工測量和模型測得的進(jìn)行數(shù)據(jù)對(duì)比的方法精細(xì)精度統(tǒng)計(jì)分析。在模型中綜合選取10組檢核邊進(jìn)行邊長對(duì)比,依次對(duì)10組邊進(jìn)行人工測距和模型測量,數(shù)據(jù)對(duì)比精度統(tǒng)計(jì)如表1所示。

表1 融合后三維模型邊長精度統(tǒng)計(jì)表
由表1精度統(tǒng)計(jì)可知,經(jīng)過數(shù)據(jù)融合后的點(diǎn)云模型在邊長數(shù)據(jù)上與人工激光測距儀所測得邊長整體誤差為 2.8 cm,能夠滿足古建筑測繪規(guī)范的尺寸檢查中誤差限差要求。
5 結(jié) 語
通過工程實(shí)踐表明,利用無人機(jī)搭載高效的數(shù)據(jù)采集設(shè)備及專業(yè)的數(shù)據(jù)處理流程生成的數(shù)據(jù)成果能夠精確獲得復(fù)雜表明紋理的三維實(shí)景模型,它直觀反映地物的外觀、位置、高度等屬性。三維激光掃描可以高效獲取無人機(jī)所無法拍攝的地面盲區(qū)及古建內(nèi)部復(fù)雜結(jié)構(gòu)的三維點(diǎn)云數(shù)據(jù),兩種方法有機(jī)融合能夠?qū)崿F(xiàn)優(yōu)勢(shì)互補(bǔ)。應(yīng)用無人機(jī)與三維激光掃描儀進(jìn)行空地一體化作業(yè),采用空、地點(diǎn)云融合處理的方案,有效解決古建數(shù)字建檔測繪工作中從整體到局部各方面的精細(xì)化建模需求,能夠?qū)⒐沤ㄐ畔⒍嘟嵌缺磉_(dá)出來,真正實(shí)現(xiàn)360°建模。一體化古建測繪形成了一套集建筑實(shí)景三維、建筑全景影像、建筑數(shù)字檔案的完整翔實(shí)數(shù)據(jù)檔案,將助力歷史風(fēng)貌建筑的維修保護(hù)和開放利用。
猜你喜歡
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發(fā)展導(dǎo)向(2019年10期)2019-08-24 06:25:28
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
中國公共安全(2017年7期)2017-10-13 08:18:11
