常導(dǎo)高速磁懸浮運行安全監(jiān)控總體方案研究
2024-01-08 04:16:40孟川舒劉陽學
鐵路計算機應(yīng)用 2023年12期
孟川舒,劉陽學
(1.國防科技大學 智能科學學院,長沙 410073;2.中國鐵道科學研究院集團有限公司 電子計算技術(shù)研究所,北京 100081)
常導(dǎo)電磁懸浮技術(shù)是我國目前唯一可實現(xiàn)工程應(yīng)用的高速磁懸浮技術(shù)[1],經(jīng)過20 余年的研究、試驗和積累,隨著時速600 km 工程樣車下線,我國常導(dǎo)高速磁懸浮已經(jīng)開始邁向工程試驗階段。
運行安全是軌道交通系統(tǒng)的核心,高速磁懸浮列車行車速度更高、運行系統(tǒng)更為復(fù)雜,對安全風險更為敏感。從工程試驗階段開始,列車將在實際線路上運行,運行安全將成為首要問題。目前,國內(nèi)外高速磁懸浮工程試驗線路和商業(yè)運營線路非常少,并且線路覆蓋工況相對簡單,有關(guān)運行安全的研究多為對運行控制、牽引控制、懸浮導(dǎo)向等單一專業(yè)系統(tǒng)的技術(shù)性研究,面向真實運營環(huán)境和整體安全保障的系統(tǒng)性安全研究很少。朱忠英[2]基于上海磁懸浮實際情況研究了運營安全保障體系;侯圣杰等人[3]研究了氣象、地質(zhì)等運行環(huán)境與災(zāi)害的監(jiān)測預(yù)警系統(tǒng)方案;其他相關(guān)研究亟待開展。而我國高速鐵路(簡稱:高鐵)已經(jīng)具備非常豐富的運行安全保障經(jīng)驗,形成了成套管理和技術(shù)體系[4-6],其共性經(jīng)驗可為高速磁懸浮運行安全方案研究提供借鑒。
本文參考現(xiàn)有研究成果,歸納常導(dǎo)高速磁懸浮運行安全特點,進一步分析運行安全監(jiān)控邏輯,從總體上明確了運行安全監(jiān)控的對象與層次,在此基礎(chǔ)上提出綜合監(jiān)控模式,開展基于綜合監(jiān)控的常導(dǎo)高速磁懸浮運行安全監(jiān)控總體方案研究。
1 常導(dǎo)高速磁懸浮運行安全特點分析
常導(dǎo)高速磁懸浮系統(tǒng)主要包括列車、線路、牽引供電、通信信號等4 個專業(yè)系統(tǒng),構(gòu)成核心運行系統(tǒng)。借鑒高鐵經(jīng)驗,從運營角度形成常導(dǎo)高速磁懸浮完整系統(tǒng)還須包括安全防災(zāi)、運輸組織、旅客服務(wù)、運行維護、網(wǎng)絡(luò)信息等方面。常導(dǎo)高速磁懸浮運行安全特點主要體現(xiàn)在以下3 個方面。
(1)對外部運行環(huán)境更為敏感。高速磁懸浮列車運行速度非常高,對運行環(huán)境中的任何風險都會非常敏感。例如,強風、強降水、凍雨結(jié)冰、地震、地質(zhì)災(zāi)害、雷電等極端天氣及自然災(zāi)害對列車安全運行存在很大影響,很可能直接或間接造成列車失穩(wěn)、車軌碰撞等危險情況,帶來災(zāi)難性事故;此外,由于列車懸浮間隙很小(8~12 mm 左右)且速度高,對軌道結(jié)構(gòu)平順性的要求更為嚴苛[7],所以基礎(chǔ)設(shè)施不平順度超限、線路異物等情況造成的危害極大。
(2)常導(dǎo)高速磁懸浮系統(tǒng)自身安全監(jiān)測和控制的感知精準性、響應(yīng)實時性、控制可靠性要求更高。該系統(tǒng)依靠電磁力運行,車軌沒有機械接觸,本質(zhì)上是基于信息的機電控制系統(tǒng),需要實時監(jiān)測感知相關(guān)指標物理量,如道岔狀態(tài)、懸浮間隙、牽引電流、列車姿態(tài)等,如發(fā)生非正常情況(如砸軌、車體自激振蕩等),則需要機電控制系統(tǒng)及時作出響應(yīng),避免事故/災(zāi)難發(fā)生。
(3)耦合度高,各種信息的關(guān)聯(lián)度高,安全綜合分析能力要求更高。常導(dǎo)高速磁懸浮系統(tǒng)是地控車模式,運行控制、牽引控制、懸浮控制、測速定位、通信等系統(tǒng)緊密耦合;此外,由于定子布設(shè)在地面,車–軌–線也是耦合關(guān)系。因此,常導(dǎo)高速磁懸浮系統(tǒng)所產(chǎn)生的各種運行安全監(jiān)控信息的關(guān)聯(lián)度非常高,同一數(shù)據(jù)可能具有多專業(yè)多維度的語義,要求安全監(jiān)控系統(tǒng)具備對安全數(shù)據(jù)綜合分析和挖掘的能力。
以上特點決定了常導(dǎo)高速磁懸浮運行安全監(jiān)控的模式、架構(gòu)、功能等方面的設(shè)計考慮需要更加精細和全面。
2 常導(dǎo)高速磁懸浮運行安全監(jiān)控邏輯與模式
2.1 運行安全監(jiān)控邏輯
監(jiān)控邏輯是明確運行安全監(jiān)控目標和業(yè)務(wù)流程的必要條件,通過邏輯分析,能夠從安全視角抽象解析整個運行系統(tǒng),梳理出可監(jiān)控的關(guān)鍵環(huán)節(jié)及相互關(guān)系。參考安全風險管理和應(yīng)急管理相關(guān)理論,常導(dǎo)高速磁懸浮運行安全監(jiān)控邏輯框架可分為3 層,即物理層、狀態(tài)層和事件層,如圖1 所示。

圖1 高速磁懸浮運行安全監(jiān)控邏輯框架
(1)物理層對應(yīng)的是安全風險源,即監(jiān)控對象的物理實體,按屬性可分為人、系統(tǒng)、環(huán)境等3 類;
(2)狀態(tài)層對應(yīng)的是運行安全風險,即物理層監(jiān)控對象發(fā)生了使業(yè)務(wù)、技術(shù)或事件的狀態(tài)轉(zhuǎn)向不安全的風險,風險點是該類風險的具體表現(xiàn),由一個主要技術(shù)指標或若干技術(shù)指標構(gòu)成,能夠直接或間接獲取指標信息進行監(jiān)控;
(3)事件層對應(yīng)的是危情,即風險進一步發(fā)展、監(jiān)控對象的狀態(tài)發(fā)生實質(zhì)性改變、影響運行安全的危險場景。
相應(yīng)地,從安全管理的角度,對風險源要充分進行預(yù)防性管理,及時監(jiān)測和控制風險,當發(fā)生未能避免的危情時能夠及時有效處置;同時,嚴密控制事態(tài)發(fā)展,降低損失和影響,以監(jiān)控為中心形成邏輯閉環(huán)。因此,常導(dǎo)高速磁懸浮運行安全監(jiān)控的基本邏輯是采用各種技術(shù)手段對涉及運行安全的風險點進行監(jiān)控,及早發(fā)現(xiàn)和處理問題,最大程度地降低風險,避免其向危情方向發(fā)展,保障列車運行安全。
2.2 運行安全監(jiān)控模式
與輪軌不同,常導(dǎo)高速磁懸浮系統(tǒng)的運行控制與牽引控制緊密耦合,設(shè)置中央控制系統(tǒng),集中實現(xiàn)列車牽引控制、運行控制和車地通信管理[8],因此,與基本行車安全相關(guān)的監(jiān)控都由中央控制系統(tǒng)實現(xiàn)。本文在中央控制系統(tǒng)層面之上構(gòu)建安全管控層面的、面向全部運營安全環(huán)節(jié)的運行安全綜合監(jiān)控系統(tǒng),匯集全部安全監(jiān)控信息,基于安全數(shù)據(jù)綜合分析,實現(xiàn)常導(dǎo)高速磁懸浮運行安全綜合監(jiān)控,更有利于發(fā)揮大數(shù)據(jù)作用,提高安全信息運用效率,增強協(xié)同安全防控能力。
3 常導(dǎo)高速磁懸浮運行安全監(jiān)控總體方案
3.1 總體架構(gòu)
常導(dǎo)高速磁懸浮運行安全監(jiān)控方案總體架構(gòu)如圖2 所示,可分為狀態(tài)層、數(shù)據(jù)層和系統(tǒng)層。
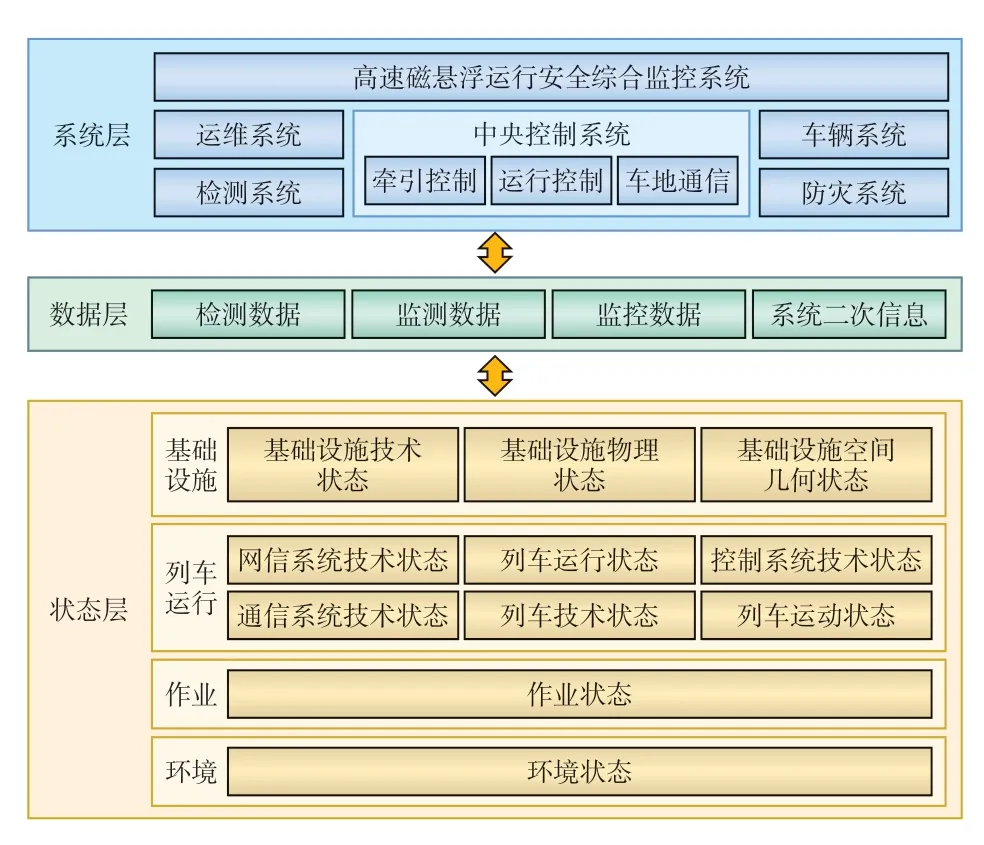
圖2 高速磁懸浮運行安全監(jiān)控方案總體架構(gòu)
(1)狀態(tài)層對應(yīng)邏輯框架中的安全狀態(tài),按照業(yè)務(wù)屬性,可將涉及人、系統(tǒng)、環(huán)境的安全狀態(tài)劃分為基礎(chǔ)設(shè)施、列車運行、作業(yè)和環(huán)境共4 大類11小類,每一小類又包含若干個風險點。通過監(jiān)控相關(guān)風險指標,獲得對應(yīng)監(jiān)控對象的狀態(tài)數(shù)據(jù)。
(2)數(shù)據(jù)層對應(yīng)從狀態(tài)層獲取的各類數(shù)據(jù)的集合,包括各類檢測數(shù)據(jù)、監(jiān)測數(shù)據(jù)、監(jiān)控數(shù)據(jù)及相關(guān)專業(yè)系統(tǒng)生成的二次信息,基于數(shù)據(jù)層可實現(xiàn)安全大數(shù)據(jù)分析。
(3)系統(tǒng)層對應(yīng)獲取運行安全相關(guān)數(shù)據(jù)的各個系統(tǒng),包括基礎(chǔ)設(shè)施檢測、防災(zāi)監(jiān)測等各專業(yè)系統(tǒng),以及中央控制系統(tǒng)和運行安全綜合監(jiān)控系統(tǒng)。運行安全綜合監(jiān)控系統(tǒng)位于頂層,與各專業(yè)系統(tǒng)、中央控制系統(tǒng)通過安全數(shù)據(jù)產(chǎn)生交互關(guān)系,以監(jiān)為主、以控為輔。
3.2 主要功能
3.2.1 基礎(chǔ)設(shè)施監(jiān)控
常導(dǎo)高速磁懸浮基礎(chǔ)設(shè)施主要包括橋梁/線路梁體、懸浮導(dǎo)向軌道及線圈、牽引定子及線圈、道岔、隧道、車站、變電所等,對其監(jiān)控分為技術(shù)狀態(tài)、物理狀態(tài)和空間幾何狀態(tài)等3 個方面。
(1)技術(shù)狀態(tài)監(jiān)控。主要是對橋梁/線路梁體、車站雨棚天橋的撓度、振動頻率等技術(shù)指標進行監(jiān)控,看其是否有異常或超限情況發(fā)生。
(2)物理狀態(tài)監(jiān)控。主要是對橋梁/線路梁體、軌道、定子、線圈、隧道襯砌、雨棚天橋、站臺等傷損情況進行監(jiān)控,如構(gòu)筑物裂紋、空鼓、殘缺、坍塌等物理損傷。
(3)空間幾何狀態(tài)監(jiān)控。主要是對橋梁/線路梁體、雨棚天橋的沉降或姿態(tài)異常,以及軌道線路不平順、道岔不平順、道岔平移不到位、站臺超限等空間幾何異常問題進行監(jiān)控。
3.2.2 列車運行監(jiān)控
列車運行主要涉及車輛、控制、通信、網(wǎng)信等方面。
(1)列車技術(shù)狀態(tài)監(jiān)控。主要監(jiān)控車體及關(guān)鍵部件傷損、車輛電氣設(shè)備及電氣控制故障(網(wǎng)絡(luò)控制、空調(diào)、車門等)、列車供電故障等情況。
(2)列車運動狀態(tài)監(jiān)控。主要監(jiān)控車體失穩(wěn)(蛇形、振蕩、晃車等)、車體砸軌、懸浮間隙持續(xù)超限等情況。
(3)列車運行狀態(tài)監(jiān)控。主要監(jiān)控丟車、冒進、速度異常、制動異常、異常停車等情況,此功能主要由中央控制系統(tǒng)實現(xiàn),也需要利用多源信息進行輔助監(jiān)控。
(4)控制系統(tǒng)技術(shù)狀態(tài)監(jiān)控。主要包括運行控制系統(tǒng)、牽引控制系統(tǒng)、供電系統(tǒng)本身的故障監(jiān)控,主要由中央控制系統(tǒng)實現(xiàn)。
(5)通信系統(tǒng)技術(shù)狀態(tài)監(jiān)控。主要是地面及車地通信系統(tǒng)故障監(jiān)控,如通信時延異常、基站故障、越區(qū)切換故障等情況。
(6)網(wǎng)絡(luò)信息(簡稱:網(wǎng)信)系統(tǒng)技術(shù)狀態(tài)監(jiān)控。主要包括網(wǎng)絡(luò)安全、信息系統(tǒng)運行情況、數(shù)據(jù)安全等方面實時監(jiān)控。
3.2.3 作業(yè)監(jiān)控
作業(yè)狀態(tài)監(jiān)控的對象是工作人員,包括違規(guī)上線、違規(guī)操作、操作失誤等。違規(guī)上線方面主要是結(jié)合作業(yè)計劃、作業(yè)狀態(tài)等監(jiān)控人員上線作業(yè)情況;操作方面主要是監(jiān)控作業(yè)過程并通過結(jié)果反饋。作業(yè)狀態(tài)監(jiān)控主要涉及車站及車上客運作業(yè)、線路運營維護(簡稱:運維)等內(nèi)容。
3.2.4 環(huán)境監(jiān)控
環(huán)境狀態(tài)監(jiān)控主要是對氣象狀態(tài)、地質(zhì)災(zāi)害、異物侵限、火災(zāi)的監(jiān)控。氣象方面主要包括強風、強降水、積雪、結(jié)冰、雷電等場景,需要進行實時監(jiān)控;地災(zāi)方面主要包括地震、沉降、滑坡及泥石流、危巖落石等場景,需要進行實時監(jiān)控,也需要持續(xù)檢測監(jiān)測;異物侵限方面主要包括旅客違規(guī)侵限、區(qū)間周界入侵、線路異物等場景,需要實時監(jiān)控;火災(zāi)主要是列車、車站內(nèi)火情的實時監(jiān)控。
3.3 關(guān)鍵技術(shù)
常導(dǎo)高速磁懸浮運行安全監(jiān)控技術(shù)體系龐大,從數(shù)據(jù)邏輯的角度,關(guān)鍵技術(shù)主要包括前端產(chǎn)生數(shù)據(jù)的檢測監(jiān)測技術(shù)、系統(tǒng)端處理數(shù)據(jù)的數(shù)據(jù)融合技術(shù)和應(yīng)用端運用數(shù)據(jù)的大數(shù)據(jù)分析技術(shù)。
3.3.1 檢測監(jiān)測技術(shù)
檢測監(jiān)測技術(shù)是利用聲、光、電、熱、磁等基本物理手段測量監(jiān)控對象物理狀態(tài)的技術(shù),獲取的數(shù)據(jù)是最為原始的數(shù)據(jù)。按照前述狀態(tài)分類,基礎(chǔ)設(shè)施檢測監(jiān)測方面主要采用圖像識別、超聲檢測、激光測量、三維激光掃描、形變雷達測量、衛(wèi)星定位及測量等技術(shù);列車運行方面除了車體需要通過圖像、超聲等技術(shù)進行檢測外,其余均可通過列車系統(tǒng)自身功能進行監(jiān)控,列車運動狀態(tài)、運行狀態(tài)可采用獨立的慣性測量技術(shù)、衛(wèi)星定位技術(shù)等進行輔助監(jiān)控;作業(yè)方面主要采用視頻監(jiān)控、衛(wèi)星定位等技術(shù)融合相關(guān)管理信息實現(xiàn)監(jiān)控;環(huán)境方面,主要是基于各類傳感器的物聯(lián)網(wǎng)監(jiān)控技術(shù),同時融合視頻監(jiān)控、雷達、激光、衛(wèi)星測量等技術(shù)。不同監(jiān)控指標需要適配應(yīng)用不同技術(shù),同時在基礎(chǔ)設(shè)施、環(huán)境等存在共性場景的方面可以充分參考高鐵相關(guān)技術(shù)和系統(tǒng)。具體歸納如表1 所示。

表1 高速磁懸浮運行安全監(jiān)控涉及的主要檢測監(jiān)測技術(shù)
3.3.2 數(shù)據(jù)融合技術(shù)
數(shù)據(jù)融合技術(shù)是指在一定規(guī)則和程序下對多源數(shù)據(jù)加以自動融合分析,使信息更加可靠和可信,以完成決策和評估任務(wù)而進行的信息處理技術(shù)。其實現(xiàn)基礎(chǔ)是運行系統(tǒng)具有時空一致性保障和語義一致性保障,以確保多源數(shù)據(jù)能夠在同一時空標尺和特征描述規(guī)則下融合關(guān)聯(lián),為下一步數(shù)據(jù)的共享、分析和挖掘建立基礎(chǔ)。數(shù)據(jù)融合是分層級、分維度的,不同層級和維度所采用的數(shù)據(jù)融合技術(shù)不同。對于整個高速磁懸浮運行安全監(jiān)控而言,數(shù)據(jù)層級自下而上可分為功能單元(傳感器)層、功能系統(tǒng)層、管理系統(tǒng)層和綜合應(yīng)用層。
(1)功能單元(傳感器)層的數(shù)據(jù)融合主要是對各個檢測監(jiān)測傳感器所采集的原始數(shù)據(jù)進行融合處理,如列車測速定位單元多個定位傳感器數(shù)據(jù)的融合、列車振動監(jiān)測單元多個振動傳感器數(shù)據(jù)的融合等,主要目的是更好地控制測量誤差,更真實地反映監(jiān)控對象的實際物理狀態(tài),能夠最大程度地保持數(shù)據(jù)的完整性。卡爾曼濾波、最小二乘法等算法是這一層級數(shù)據(jù)融合處理的常用方法。
(2)功能系統(tǒng)層的數(shù)據(jù)融合主要是特征級融合,即根據(jù)數(shù)據(jù)關(guān)聯(lián)特征,從多源傳感器數(shù)據(jù)中提取部分有代表性的數(shù)據(jù),進一步融合形成特征數(shù)據(jù)。這一層的數(shù)據(jù)融合在目標檢測方面應(yīng)用較多,如激光雷達數(shù)據(jù)和毫米波雷達數(shù)據(jù)的融合,用于異物侵限檢測、線路基礎(chǔ)設(shè)施病害檢測等方面。深度學習、神經(jīng)網(wǎng)絡(luò)等方法是這一層級數(shù)據(jù)融合處理的常用方法。
(3)管理系統(tǒng)層主要是決策級融合,即每類傳感器先獨自完成原始數(shù)據(jù)融合和特征級融合,得到具有特征的初步結(jié)果,再由系統(tǒng)進行融合判決得出綜合結(jié)果。決策級融合是可信度判決和概率判決,用于列車運行控制、運行環(huán)境狀態(tài)監(jiān)測等方面。貝葉斯估計、D-S 證據(jù)推理等方法是這一層級數(shù)據(jù)融合處理的常用方法。
(4)綜合應(yīng)用層,基于各個應(yīng)用局部決策,進行包括事件數(shù)據(jù)在內(nèi)的多源異構(gòu)數(shù)據(jù)跨應(yīng)用全局融合,實現(xiàn)管理層面的綜合決策;基于大數(shù)據(jù)分析,利用專家系統(tǒng)、知識模型等實現(xiàn)全局數(shù)據(jù)融合。
3.3.3 大數(shù)據(jù)分析技術(shù)
運行安全監(jiān)控大數(shù)據(jù)分析技術(shù)是指在數(shù)據(jù)融合的基礎(chǔ)上,對整個數(shù)據(jù)集進行不同安全維度和安全特征角度的分析挖掘,發(fā)現(xiàn)數(shù)據(jù)規(guī)律,提取數(shù)據(jù)特征,反饋給相關(guān)應(yīng)用系統(tǒng),輔助人或系統(tǒng)對安全問題進行研判決策。
(1)時空維度。分析各層級數(shù)據(jù)的時空分布特征和時空關(guān)聯(lián)特征,以及結(jié)合業(yè)務(wù)特征和業(yè)務(wù)邏輯后的時–空–頻域特征,如可通過列車時空–速度實時數(shù)據(jù)與歷史數(shù)據(jù)的比對分析列車運行狀態(tài)是否正常等。
(2)特征維度。結(jié)合安全風險指標和狀態(tài)指標構(gòu)建安全特征模型,實現(xiàn)風險辨識與評估。如結(jié)合實時氣象信息、線路環(huán)境風險歷史數(shù)據(jù)和線路狀態(tài)數(shù)據(jù),辨識評估當前線路風險。
(3)邏輯維度。根據(jù)業(yè)務(wù)邏輯和數(shù)據(jù)邏輯構(gòu)建數(shù)據(jù)信任模型,實現(xiàn)數(shù)據(jù)風險評估,通過數(shù)據(jù)異常分析保障業(yè)務(wù)安全、數(shù)據(jù)真實可信,如可通過列車運行數(shù)據(jù)、人員位置數(shù)據(jù)和運維計劃數(shù)據(jù)保障線上天窗運維人員安全,出現(xiàn)數(shù)據(jù)邏輯不一致則可能出現(xiàn)現(xiàn)場作業(yè)風險或數(shù)據(jù)安全風險。
4 結(jié)束語
本文闡述了常導(dǎo)高速磁懸浮運行安全監(jiān)控的總體方案。分析常導(dǎo)高速磁懸浮運行安全特點,構(gòu)建運行安全監(jiān)控邏輯框架,提出應(yīng)采用綜合監(jiān)控模式,在中央控制系統(tǒng)之上構(gòu)建運行安全綜合監(jiān)控系統(tǒng),面向風險進行安全數(shù)據(jù)綜合分析,實現(xiàn)常導(dǎo)高速磁懸浮運行安全的全面監(jiān)控,可為高速磁懸浮安全理論研究和實際安全監(jiān)控系統(tǒng)構(gòu)建提供參考。后續(xù)將開展具體檢測技術(shù)和綜合監(jiān)控系統(tǒng)構(gòu)建的研究。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數(shù)理化(高中版.高考數(shù)學)(2021年1期)2021-03-19 08:28:38
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
無線電工程(2020年11期)2020-10-29 01:25:46
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46