一種空間對(duì)接機(jī)構(gòu)的簡(jiǎn)化建模方法及其在實(shí)驗(yàn)艙側(cè)向再對(duì)接中的應(yīng)用
2024-01-08 02:24:46胡雪平沈曉鵬劉璟龍甘克力柏合民
上海航天 2023年6期
胡雪平,沈曉鵬,劉璟龍,甘克力,柏合民,羅 斌
(1.上海宇航系統(tǒng)工程研究所,上海 201109;2.上海航天技術(shù)研究院,上海 201109)
0 引言
異體同構(gòu)周邊內(nèi)翻式對(duì)接機(jī)構(gòu)是中國(guó)載人航天交會(huì)對(duì)接的關(guān)鍵且極其復(fù)雜的機(jī)構(gòu),用于實(shí)現(xiàn)空間兩飛行器的連接與分離。張崇峰、肖余之、時(shí)軍委等[1-18]進(jìn)行了長(zhǎng)久深入的研究,文獻(xiàn)中給出了對(duì)接機(jī)構(gòu)設(shè)計(jì)組成和原理,以及針對(duì)不同對(duì)接目標(biāo)的對(duì)接機(jī)構(gòu)的緩沖參數(shù)設(shè)計(jì),詳述了對(duì)接機(jī)構(gòu)的動(dòng)力學(xué)仿真,提到對(duì)接動(dòng)力學(xué)研究具有長(zhǎng)期性和復(fù)雜性。但是,對(duì)接機(jī)構(gòu)與轉(zhuǎn)位機(jī)構(gòu)耦合的動(dòng)力學(xué)分析尚未得到深入研究。隨著載人空間站工程的發(fā)展[19-25],對(duì)接機(jī)構(gòu)需要與其他機(jī)構(gòu)一起協(xié)同完成空間站的組建,如轉(zhuǎn)位機(jī)構(gòu)和機(jī)械臂等,在空間站組建過(guò)程中,有時(shí)這些機(jī)構(gòu)同時(shí)工作,如將轉(zhuǎn)到核心艙側(cè)向后的側(cè)向再對(duì)接,是對(duì)接機(jī)構(gòu)與轉(zhuǎn)位機(jī)構(gòu)兩大復(fù)雜機(jī)構(gòu)典型耦合的動(dòng)力學(xué)過(guò)程,側(cè)向再對(duì)接動(dòng)力學(xué)模型求解極其困難,但又是空間站組建過(guò)程中典型的動(dòng)力學(xué)過(guò)程,必須經(jīng)過(guò)仿真和試驗(yàn)驗(yàn)證。在對(duì)接機(jī)構(gòu)研制過(guò)程中,對(duì)接機(jī)構(gòu)動(dòng)力學(xué)仿真模型經(jīng)過(guò)了由簡(jiǎn)單到詳細(xì)、由詳細(xì)再到簡(jiǎn)單2 個(gè)階段。第1個(gè)簡(jiǎn)單指早期研究階段,詳細(xì)的設(shè)計(jì)方案和很多參數(shù)還不具備,沒(méi)辦法進(jìn)行詳細(xì)建模;第2 個(gè)簡(jiǎn)單階段,雖然已有詳細(xì)的仿真模型,但針對(duì)不同的動(dòng)力學(xué)過(guò)程,基于運(yùn)動(dòng)過(guò)程準(zhǔn)靜態(tài)的運(yùn)動(dòng)特點(diǎn),側(cè)向再對(duì)接過(guò)程建模就是如此。再對(duì)接通過(guò)主驅(qū)動(dòng)機(jī)構(gòu)電機(jī)緩慢勻速推出對(duì)接環(huán),直到捕獲被動(dòng)對(duì)接機(jī)構(gòu),不同于兩航天器通過(guò)有相對(duì)速度的碰撞對(duì)接會(huì)產(chǎn)生較大的慣性力,捕獲時(shí)間較短,在軌接近中速正碰工況約1 s 完成捕獲,再對(duì)接則需要上百秒才能完成,如果對(duì)接機(jī)構(gòu)和轉(zhuǎn)位機(jī)構(gòu)模型都進(jìn)行詳細(xì)建模,不僅模型復(fù)雜,計(jì)算時(shí)間長(zhǎng),還容易出錯(cuò),效率很低,因此,在對(duì)接機(jī)構(gòu)有詳細(xì)模型以及工程實(shí)踐的基礎(chǔ)上,可以對(duì)機(jī)構(gòu)經(jīng)過(guò)不損失性能特點(diǎn)的適當(dāng)化簡(jiǎn),建立簡(jiǎn)化模型,并確定合理可行,用于和轉(zhuǎn)位機(jī)構(gòu)一起建立耦合動(dòng)力學(xué)模型,其精度能夠滿足工程需求。
1 對(duì)接機(jī)構(gòu)模型
實(shí)驗(yàn)艙側(cè)向再對(duì)接如圖1 所示,轉(zhuǎn)位機(jī)構(gòu)已將實(shí)驗(yàn)艙從軸向?qū)涌谵D(zhuǎn)位到側(cè)向?qū)涌冢瑐?cè)向再對(duì)接捕獲過(guò)程中,對(duì)接機(jī)構(gòu)與轉(zhuǎn)位機(jī)構(gòu)雙關(guān)節(jié)耦合工作。

圖1 側(cè)向再對(duì)接Fig.1 Schematic diagram of lateral redocking
實(shí)驗(yàn)艙對(duì)接機(jī)構(gòu)的捕獲緩沖系統(tǒng)是實(shí)現(xiàn)再對(duì)接的主要功能機(jī)構(gòu),對(duì)接機(jī)構(gòu)簡(jiǎn)化建模是針對(duì)捕獲緩沖系統(tǒng)進(jìn)行簡(jiǎn)化的。
對(duì)接機(jī)構(gòu)的捕獲緩沖系統(tǒng)主要包括對(duì)接環(huán)、捕獲鎖、絲杠聯(lián)系組合、絲杠安裝組合、差動(dòng)組合和主驅(qū)動(dòng)組合6 個(gè)功能單元。其中:對(duì)接環(huán)由3 個(gè)導(dǎo)向板和1 個(gè)對(duì)接環(huán)組成,主要起導(dǎo)向消除主被動(dòng)環(huán)初始偏差的作用;捕獲鎖在兩對(duì)接環(huán)貼合過(guò)程中實(shí)現(xiàn)兩對(duì)接環(huán)的柔性連接;絲杠聯(lián)系機(jī)構(gòu)由一對(duì)滾珠絲杠副和絲杠聯(lián)系機(jī)構(gòu)組成,單軸彈簧機(jī)構(gòu)、電磁阻尼器各自分別通過(guò)錐齒輪與絲杠聯(lián)系,絲杠聯(lián)系組合的功能是分管對(duì)接環(huán)橫向、滾轉(zhuǎn)方向的運(yùn)動(dòng)自由度和緩沖性能;絲杠安裝組合提供6 根絲杠的安裝、擺動(dòng)及向差動(dòng)組合的運(yùn)動(dòng)傳遞;差動(dòng)組合由3 個(gè)相互嵌套的差動(dòng)器和部分中間傳動(dòng)軸組成,雙軸彈簧機(jī)構(gòu)裝于其中2 個(gè)差動(dòng)器中,差動(dòng)組合對(duì)絲杠聯(lián)系組合的輸出進(jìn)行差動(dòng),提供對(duì)接環(huán)偏航、俯仰方向的自由度和緩沖性能;絲杠聯(lián)系組合與差動(dòng)組合間由中間彈簧機(jī)構(gòu)聯(lián)系;主驅(qū)動(dòng)組合前裝有自動(dòng)調(diào)整摩擦制動(dòng)器和始端彈簧機(jī)構(gòu),它們與中間彈簧機(jī)構(gòu)提供對(duì)接機(jī)構(gòu)軸向的緩沖性能。
由此,對(duì)接機(jī)構(gòu)的6 個(gè)功能單元相互配合最終實(shí)現(xiàn)了捕獲,并緩沖衰減對(duì)接環(huán)6 自由度運(yùn)動(dòng)的效果,即當(dāng)對(duì)接環(huán)受到外在沖擊時(shí)(如空間飛行器存在相對(duì)運(yùn)動(dòng)速度所致),對(duì)接機(jī)構(gòu)的緩沖系統(tǒng)對(duì)于對(duì)接環(huán)等效于一個(gè)空間六維力作用于主動(dòng)對(duì)接環(huán),使主動(dòng)對(duì)接環(huán)和實(shí)驗(yàn)艙具有一定的剛度、阻尼特性,能夠緩沖和衰減對(duì)接環(huán)受到的外在沖擊能量。基于此,進(jìn)行對(duì)接機(jī)構(gòu)簡(jiǎn)化建模,并與對(duì)接機(jī)構(gòu)整機(jī)試驗(yàn)性能曲線進(jìn)行對(duì)比,確保對(duì)接機(jī)構(gòu)的性能合理正確。
1.1 對(duì)接機(jī)構(gòu)動(dòng)力學(xué)模型
主動(dòng)對(duì)接機(jī)構(gòu)的力傳遞路徑主要分3 個(gè)層次:對(duì)接環(huán)、絲杠、彈簧阻尼等元件。對(duì)接環(huán)(含導(dǎo)向板)接觸作用力傳遞至與對(duì)接環(huán)胡克鉸接的6 根絲杠,如圖2 所示,將引起6 根絲杠長(zhǎng)度變化;絲杠的作用力,一端通過(guò)與對(duì)接環(huán)的胡克鉸接傳遞絲杠聯(lián)系組合中的齒輪傳動(dòng),最終轉(zhuǎn)化成扭轉(zhuǎn)單軸彈簧和阻尼器的力矩,卷緊彈簧,存儲(chǔ)能量,另一部分能量被阻尼器消耗;另一端通過(guò)與絲杠螺旋連接的螺母?jìng)鬟f至中間彈簧及差動(dòng)組合(含雙軸彈簧、始端彈簧和摩擦制動(dòng)器)。
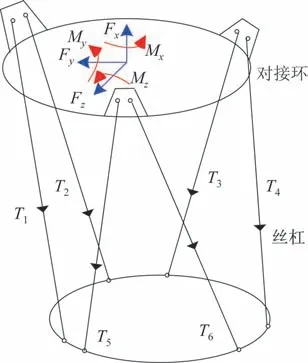
圖2 對(duì)接機(jī)構(gòu)受力分析Fig.2 Force analysis of the docking mechanism
對(duì)接機(jī)構(gòu)的動(dòng)力學(xué)模型從對(duì)接環(huán)的動(dòng)力學(xué)分析入手,對(duì)接環(huán)受到外力Fw(可分解空間3 方向力Fx、Fy、Fz和力矩Mx、My、Mz),以及6 根絲杠的作用力Ti。
式中:q=(x,y,z,φ,ψ,θ)為對(duì)接環(huán)的3 方向位移和姿態(tài)角位移,為3方向速度和姿態(tài)角速度,M(q,)為位移和速度的函數(shù),并包含對(duì)接環(huán)質(zhì)量、慣量等參數(shù)。FT1(Ti)為6 根絲杠作用力的函數(shù)。
對(duì)接機(jī)構(gòu)中彈簧阻尼元件的存在表明:當(dāng)對(duì)接環(huán)使每一個(gè)絲杠移動(dòng)時(shí),在每根絲杠上將作用有一個(gè)阻撓力Ti,i=1,2,…,6,作用于i絲杠的阻撓力,以力矩Mri的形式傳遞到齒輪,考慮到齒輪的慣性,對(duì)其進(jìn)行受力分析:
式中:Mri=Mri(θsspj,),j=1,2,3;Mai=Jμi,i=1,2,…,6,Jμi為齒輪的轉(zhuǎn)動(dòng)慣量,為齒輪的角加速度。
差動(dòng)組合如圖3 所示,由3 個(gè)差動(dòng)器組成,其中布局了2 個(gè)雙軸彈簧,外接一個(gè)始端彈簧和摩擦制動(dòng)器[13-20]。
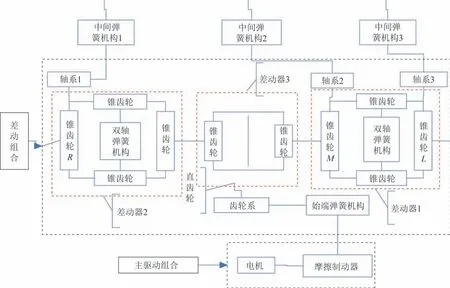
圖3 差動(dòng)組合Fig.3 Differential combination
差動(dòng)組合的動(dòng)力學(xué)分析要針對(duì)每個(gè)主要的齒輪(輸入齒輪、與雙軸彈簧連接的齒輪等)進(jìn)行受力分析,通過(guò)中間彈簧機(jī)構(gòu)力Mmidj和雙軸彈簧機(jī)構(gòu)和始端彈簧機(jī)構(gòu)(含摩擦制動(dòng)器)力Mdspj和絲杠作用力Ti的關(guān)系式:
求解動(dòng)力學(xué)方程,要進(jìn)行運(yùn)動(dòng)學(xué)分析,與動(dòng)力學(xué)力傳遞路徑的3 個(gè)層次對(duì)應(yīng),運(yùn)動(dòng)學(xué)分3 個(gè)層次:雙軸彈簧、始端彈簧(含摩擦制動(dòng)器)的運(yùn)動(dòng)通過(guò)差動(dòng)組合、中間彈簧機(jī)構(gòu)傳遞至與絲杠螺旋連接螺母;單軸彈簧機(jī)構(gòu)和阻尼器的運(yùn)動(dòng)傳遞至與絲杠聯(lián)系組合胡克鉸接的絲杠;6 根絲杠螺母的協(xié)調(diào)運(yùn)動(dòng)決定了對(duì)接環(huán)剛體6 自由度的運(yùn)動(dòng)。
綜上所述,主動(dòng)式對(duì)接機(jī)構(gòu)建模具有一定的復(fù)雜性。如果從另外一個(gè)角度考慮,不去關(guān)注對(duì)接機(jī)構(gòu)的對(duì)接環(huán)、絲杠螺母、齒輪、彈簧阻尼器等傳動(dòng)緩沖的精確力傳遞關(guān)系,而是關(guān)注其整體性能,建立如空間六維彈簧阻尼模型來(lái)代替實(shí)際對(duì)接機(jī)構(gòu)的整體作用效果,即假設(shè)對(duì)接環(huán)與安裝對(duì)接機(jī)構(gòu)的實(shí)驗(yàn)艙之間作用著一個(gè)非線性的六維廣義力,如圖4所示。

圖4 對(duì)接機(jī)構(gòu)緩沖系統(tǒng)Fig.4 Buffer system of the docking mechanism
在這個(gè)階段,簡(jiǎn)化模型有著對(duì)接機(jī)構(gòu)詳細(xì)模型和工程實(shí)踐的雙重基礎(chǔ),對(duì)接機(jī)構(gòu)詳細(xì)模型可以進(jìn)行整機(jī)仿真,輸入各向運(yùn)動(dòng)指令,繪制相應(yīng)方向的位移或角位移與力或力矩的關(guān)系,對(duì)接機(jī)構(gòu)整機(jī)試驗(yàn)臺(tái)也積累了整機(jī)試驗(yàn)的結(jié)果,可以提取出各向整機(jī)性能的測(cè)試結(jié)果。對(duì)詳細(xì)的對(duì)接機(jī)構(gòu)模型,縱向即x方向施加1 mm/s的速度進(jìn)行壓縮到70 mm,其他y和z方向施加1 mm/s 的速度進(jìn)行拉偏到±100 mm并同速恢復(fù)到零位,繞x、y、z3 方向施加0.1°/s 的角速度進(jìn)行轉(zhuǎn)動(dòng)方向的拉偏到±10°并同速恢復(fù)到零位,繪制其位移(角位移)變化同力(力矩)之間的曲線,并與試驗(yàn)結(jié)果進(jìn)行了對(duì)比,x方向和偏轉(zhuǎn)方向的對(duì)比結(jié)果如圖5 所示,橫向y和z以及3 個(gè)偏轉(zhuǎn)方向的對(duì)比曲線是類似的。對(duì)比結(jié)果表明:對(duì)接機(jī)構(gòu)詳細(xì)模型的整機(jī)性能仿真結(jié)果與試驗(yàn)結(jié)果從數(shù)值和趨勢(shì)上一致性很好,可以在側(cè)向再對(duì)接過(guò)程中使用對(duì)接機(jī)構(gòu)六維非線性簡(jiǎn)化模型,性能參數(shù)使用試驗(yàn)值或仿真值都可以。
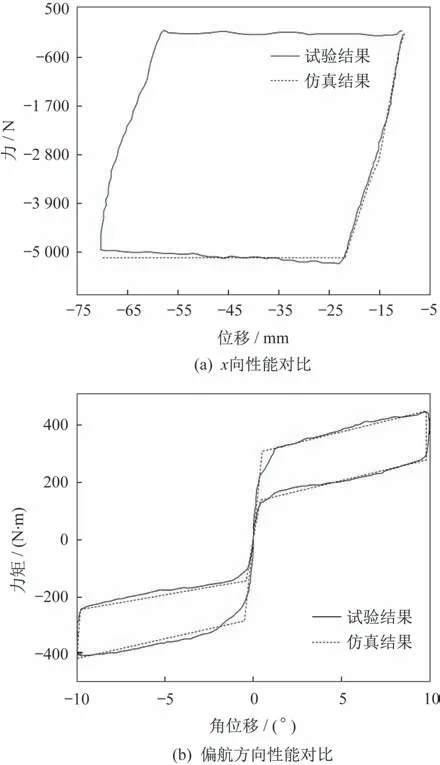
圖5 對(duì)接機(jī)構(gòu)整機(jī)性能Fig.5 Overall performance of the docking mechanism
1.2 對(duì)接機(jī)構(gòu)簡(jiǎn)化建模方法
根據(jù)對(duì)接機(jī)構(gòu)詳細(xì)模型的整機(jī)性能曲線與工程實(shí)踐結(jié)果,建立對(duì)接機(jī)構(gòu)的簡(jiǎn)化模型。
1.2.1 縱向模型
對(duì)接機(jī)構(gòu)縱向即x向模型如圖6 所示,該性能曲線是分段線性函數(shù),可表示為式(4)和式(5)。

圖6 對(duì)接機(jī)構(gòu)縱向性能Fig.6 Axialperformance of the docking mechanism
其中,對(duì)接機(jī)構(gòu)縱向受壓時(shí),受到的緩沖系統(tǒng)等效縱向緩沖力為
式中:f為對(duì)接環(huán)縱向受到對(duì)接機(jī)構(gòu)彈簧阻尼等效的緩沖作用力;x為對(duì)接環(huán)縱向的運(yùn)動(dòng)位移變化量;x01、x1、x2為對(duì)接環(huán)縱向的運(yùn)動(dòng)位移特征區(qū)間值;f01、f1、f2為對(duì)接環(huán)在不同下壓位移區(qū)間的力特性系數(shù);k01、k1、k2為對(duì)接環(huán)在不同受拉或下壓位移區(qū)間的剛度特性系數(shù),可以通過(guò)力和位移參數(shù)表示,不是獨(dú)立參數(shù)。
對(duì)接機(jī)構(gòu)受拉時(shí),受到的緩沖系統(tǒng)等效縱向緩沖力為
1.2.2 其他方向模型
對(duì)接機(jī)構(gòu)的橫向和角度偏轉(zhuǎn)方向的模型和性能曲線類似,原理如圖7 所示,以偏航為例。其中,φ是對(duì)接環(huán)偏航方向的運(yùn)動(dòng)角位移,φ1、φ2、φ3、φ4是對(duì)接環(huán)偏航方向的運(yùn)動(dòng)位移特征區(qū)間值,M1、M2、M3、M4是偏航方向角位移特征區(qū)間的力矩特性系數(shù)。滾轉(zhuǎn)俯仰和橫向方向的性能與偏航類似,數(shù)值不同見(jiàn)表1。

表1 與圖7 對(duì)應(yīng)的彈簧特性Tab.1 Spring characteristics corresponding Fig.7
當(dāng)>0 時(shí),
圖7 與式(6)、式(7)、式(8)是對(duì)應(yīng)的。
表1 和表2 的彈簧特性參數(shù)既是對(duì)接機(jī)構(gòu)整機(jī)仿真模型的計(jì)算結(jié)果,也是對(duì)接機(jī)構(gòu)簡(jiǎn)化模型的輸入值,表1 中的φ和M的關(guān)系是3 方向偏轉(zhuǎn)的特性參數(shù)值,y/z和f的關(guān)系是2 橫向平移方向的特性參數(shù)值,表2 是縱向x方向的特性參數(shù)值。

表2 與圖6 對(duì)應(yīng)的彈簧特性Tab.2 Spring characteristics corresponding to Fig.6
表1 中的序號(hào)1~4 與圖7 中的下標(biāo)有對(duì)應(yīng)關(guān)系,負(fù)方向特性關(guān)于原點(diǎn)反對(duì)稱。
表2 中的序號(hào)1~4 與圖6 中坐標(biāo)軸橫軸從左到右依次對(duì)應(yīng)。
2 簡(jiǎn)化模型在側(cè)向再對(duì)接中的應(yīng)用
2.1 轉(zhuǎn)位機(jī)構(gòu)輔助實(shí)驗(yàn)艙側(cè)向再對(duì)接模型
沈曉鵬、劉艷[26]論述了和平號(hào)和中國(guó)空間站轉(zhuǎn)位組建方案,無(wú)論是翻轉(zhuǎn)轉(zhuǎn)位組建還是平面轉(zhuǎn)位組建,其中,側(cè)向再對(duì)接都是組建中一個(gè)重要的動(dòng)力學(xué)過(guò)程。
側(cè)向再對(duì)接捕獲過(guò)程與通常的軸向?qū)硬东@緩沖過(guò)程相同之處是:都需要對(duì)接機(jī)構(gòu)的捕獲鎖實(shí)現(xiàn)捕獲,捕獲過(guò)程中絲杠聯(lián)系組合,絲杠安裝組合、差動(dòng)組合等捕獲緩沖系統(tǒng)工作原理相同。不同之處是:軸向?qū)拥膭?dòng)力源自空間兩飛行器存在相對(duì)運(yùn)動(dòng)速度產(chǎn)生的能量,慣性較大,捕獲時(shí)間較短,而側(cè)向再對(duì)接動(dòng)力是對(duì)接機(jī)構(gòu)電機(jī)以勻速緩慢推出對(duì)接環(huán)直到捕獲安裝在節(jié)點(diǎn)艙側(cè)向口被動(dòng)對(duì)接機(jī)構(gòu)的導(dǎo)向板,慣性較小,捕獲時(shí)間較長(zhǎng)。
側(cè)向再對(duì)接仿真模型如圖8 所示,通過(guò)Adams軟件建立轉(zhuǎn)位機(jī)構(gòu)輔助實(shí)驗(yàn)艙側(cè)向再對(duì)接模型,模型主要包括實(shí)驗(yàn)艙、實(shí)驗(yàn)艙對(duì)接機(jī)構(gòu)、核心艙、核心艙對(duì)接機(jī)構(gòu)、轉(zhuǎn)位機(jī)構(gòu);實(shí)驗(yàn)艙對(duì)接機(jī)構(gòu)包括主驅(qū)動(dòng)、主動(dòng)對(duì)接環(huán)、捕獲鎖;核心艙對(duì)接機(jī)構(gòu)主要包含被動(dòng)對(duì)接環(huán)和卡板器;轉(zhuǎn)位機(jī)構(gòu)包括轉(zhuǎn)位機(jī)構(gòu)轉(zhuǎn)臂、轉(zhuǎn)位機(jī)構(gòu)肩關(guān)節(jié)彈簧阻尼機(jī)構(gòu)。主驅(qū)動(dòng)實(shí)現(xiàn)勻速推出對(duì)接環(huán)的運(yùn)動(dòng),對(duì)接環(huán)與實(shí)驗(yàn)艙之間是對(duì)接機(jī)構(gòu)簡(jiǎn)化模型,實(shí)現(xiàn)對(duì)接環(huán)的6 自由彈性緩沖作用,3 把捕獲鎖均布在對(duì)接環(huán)周邊,實(shí)現(xiàn)捕獲卡板器的捕獲功能,轉(zhuǎn)位機(jī)構(gòu)的肩關(guān)節(jié)彈簧阻尼機(jī)構(gòu)與對(duì)接機(jī)構(gòu)協(xié)同運(yùn)動(dòng),提供側(cè)向再對(duì)接過(guò)程的支撐連接,共同實(shí)現(xiàn)側(cè)向再對(duì)接。

圖8 側(cè)向再對(duì)接仿真模型Fig.8 Simulation model of lateral re-docking
2.2 仿真結(jié)果及與試驗(yàn)結(jié)果的對(duì)比
應(yīng)用轉(zhuǎn)位機(jī)構(gòu)輔助實(shí)驗(yàn)艙側(cè)向再對(duì)接的動(dòng)力學(xué)模型進(jìn)行仿真,環(huán)推出速度3 mm/s,轉(zhuǎn)位機(jī)構(gòu)肩關(guān)節(jié)彈簧剛度350 N·m/°,阻尼3 500 N·m/((°)·s-1),對(duì)接機(jī)構(gòu)y和z向阻尼1 200 N/(m·s-1),偏轉(zhuǎn)方向阻尼10 N·m/((°)·s-1)。如圖9 所示,主要方向的仿真結(jié)果與全時(shí)序試驗(yàn)臺(tái)試驗(yàn)結(jié)果進(jìn)行對(duì)比,其中橫軸均為時(shí)間,主要考察了轉(zhuǎn)位機(jī)構(gòu)輔助再對(duì)接過(guò)程中的對(duì)接機(jī)構(gòu)和轉(zhuǎn)位機(jī)構(gòu)的運(yùn)動(dòng),以及對(duì)核心艙的干擾力和力矩,力和力矩方向如圖8 所示。

圖9 仿真與試驗(yàn)結(jié)果對(duì)比Fig.9 Comparison of the simulation and test results
圖9(a)是x向?qū)恿Φ姆抡媾c試驗(yàn)結(jié)果對(duì)比,圖9(b)是繞z向偏轉(zhuǎn)力矩的仿真與試驗(yàn)對(duì)比結(jié)果,峰值約810 N·m,圖9(c)繞z向偏轉(zhuǎn)力矩的仿真與試驗(yàn)對(duì)比結(jié)果,峰值約600 N·m,數(shù)值和趨勢(shì)一致性較好。仿真與試驗(yàn)不僅對(duì)比了對(duì)接環(huán)捕獲力和力矩結(jié)果,也對(duì)比了對(duì)接環(huán)典型運(yùn)動(dòng)方向的位移和角位移結(jié)果。
仿真與試驗(yàn)的對(duì)接環(huán)z向運(yùn)動(dòng)位移、繞y向角位移以及轉(zhuǎn)位機(jī)構(gòu)肩關(guān)節(jié)的角位移對(duì)比結(jié)果見(jiàn)表3,誤差最大值約8%,仿真與試驗(yàn)結(jié)果一致性較好,數(shù)據(jù)有效,可以作為組建過(guò)程流程設(shè)計(jì)的依據(jù)。
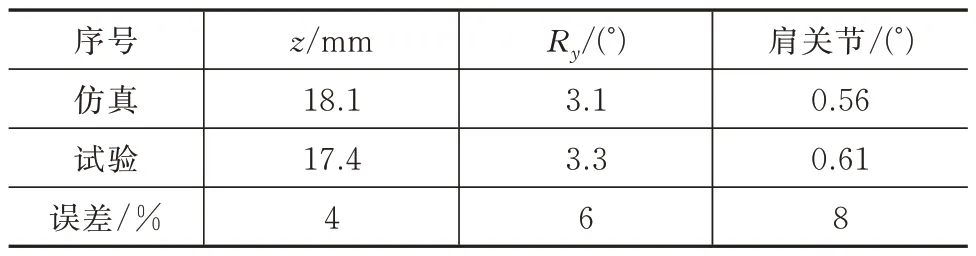
表3 仿真與試驗(yàn)的運(yùn)動(dòng)結(jié)果對(duì)比Tab.3 Comparison of the simulation and test results
3 結(jié)束語(yǔ)
文章以異體同構(gòu)周邊內(nèi)翻式對(duì)接機(jī)構(gòu)為研究對(duì)象,建立了簡(jiǎn)化的對(duì)接機(jī)構(gòu)緩沖系統(tǒng)模型,在此基礎(chǔ)上,進(jìn)行了簡(jiǎn)化模型的應(yīng)用研究,建立了轉(zhuǎn)位機(jī)構(gòu)輔助實(shí)驗(yàn)艙側(cè)向再對(duì)接仿真模型,給出再對(duì)接過(guò)程仿真的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)結(jié)果。仿真結(jié)果與試驗(yàn)結(jié)果的數(shù)值和趨勢(shì)一致性較好,運(yùn)動(dòng)量對(duì)比結(jié)果誤差小于10%,結(jié)果可以作為組建過(guò)程流程設(shè)計(jì)的依據(jù)。
這種復(fù)雜機(jī)構(gòu)動(dòng)力學(xué)簡(jiǎn)化方法對(duì)于其他復(fù)雜機(jī)構(gòu)也有借鑒意義,有助于開(kāi)展全面的動(dòng)力學(xué)過(guò)程研究。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2022年1期)2022-02-26 06:57:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
計(jì)算機(jī)應(yīng)用(2021年3期)2021-03-18 13:44:48
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03