基于聲磁復(fù)合的磁異常探測(cè)與定位
2024-01-03 16:03:38劉忠樂(lè)胡家文文無(wú)敵
艦船科學(xué)技術(shù) 2023年22期
李 毅,劉忠樂(lè),陳 俊,胡家文,文無(wú)敵
(1. 海軍工程大學(xué) 兵器工程學(xué)院,湖北 武漢 430033;2. 華中科技大學(xué) 光學(xué)與電子信息學(xué)院,湖北 武漢 430030)
0 引 言
鐵磁性目標(biāo)物在地磁背景場(chǎng)中會(huì)被磁化,進(jìn)而改變背景場(chǎng)原有的分布,產(chǎn)生磁異常現(xiàn)象。通過(guò)對(duì)磁場(chǎng)的測(cè)量,將測(cè)量的磁場(chǎng)信息進(jìn)行一定的處理來(lái)判斷目標(biāo)物的有無(wú)、實(shí)現(xiàn)目標(biāo)物的定位。磁異常探測(cè)技術(shù)中測(cè)量到的磁場(chǎng)信號(hào)含有豐富的噪聲。目前磁異常探測(cè)常用手段主要是傳感器和被探測(cè)物相對(duì)運(yùn)動(dòng)直到彼此錯(cuò)開(kāi),再利用生成的完備數(shù)據(jù)進(jìn)行建模求解。然而現(xiàn)在的磁異常探測(cè)更需要能夠及時(shí)預(yù)判被探測(cè)物的具體定位。
如何在有噪聲干擾且信噪比極低的情況下,實(shí)現(xiàn)對(duì)磁性目標(biāo)的預(yù)判定位是磁異常探測(cè)技術(shù)領(lǐng)域中一個(gè)比較棘手的問(wèn)題。
正交基函數(shù)是磁異常探測(cè)技術(shù)中檢測(cè)磁性目標(biāo)物的經(jīng)典算法。Frumkis 等[1]基于正交基函數(shù)的信號(hào)能量評(píng)估,提出了OBF 算法。通過(guò)該算法可以提高目標(biāo)信號(hào)的信噪比,從而判斷目標(biāo)信號(hào)的有無(wú)。Qin 等[2]利用地磁坐標(biāo)系3 個(gè)軸向半徑的梯度信息,進(jìn)一步對(duì)OBF算法進(jìn)行改進(jìn)。使其對(duì)目標(biāo)磁異常檢測(cè)有了更好的表征,顯著提高信噪比。Ginzburg 等[3]利用2 個(gè)磁傳感器測(cè)量總場(chǎng)梯度信息,通過(guò)改進(jìn)的正交基函數(shù)對(duì)磁場(chǎng)信號(hào)進(jìn)行分解,以提高信噪比和信號(hào)檢測(cè)的特性。OBF算法有著噪聲與正交基函數(shù)不相關(guān)的特性,因而有著對(duì)噪聲不敏感,有效抑制噪聲和提高信噪比的優(yōu)點(diǎn)。但目前對(duì)OBF 算法的研究大部分用于判斷磁異常信號(hào)的有無(wú)。利用OBF 強(qiáng)大的抗噪聲性來(lái)實(shí)現(xiàn)磁目標(biāo)的定位還不是很普遍。現(xiàn)階段,利用磁場(chǎng)梯度信息對(duì)磁性目標(biāo)物進(jìn)行定位的研究越來(lái)越多。因其能有效規(guī)避背景場(chǎng)的干擾,而廣泛應(yīng)用到磁異常探測(cè)定位中。Sui 等[4]通過(guò)從旋轉(zhuǎn)磁盤(pán)上的單軸磁傳感器中提取二階和三階梯度張量,以此來(lái)實(shí)現(xiàn)磁偶極子的高效定位。Huang等[5]將磁梯度張量和吃水深度結(jié)合起來(lái),實(shí)現(xiàn)水下航行器的有效定位。Fan 等[6]提出一種基于總磁場(chǎng)梯度定位目標(biāo)的快速線(xiàn)性算法,實(shí)現(xiàn)了靜態(tài)磁目標(biāo)的高速定位。大多數(shù)利用梯度信息進(jìn)行目標(biāo)的定位方法,雖然有著不易受到背景場(chǎng)干擾,能較好描述磁異常場(chǎng)的優(yōu)點(diǎn)。但是這些方法都是在背景噪聲不明顯,信噪比較高的情況下才能實(shí)現(xiàn)磁性目標(biāo)的準(zhǔn)確定位。
Birsan[7]通過(guò)傳感器陣列,將正交基函數(shù)與單一梯度信息結(jié)合,將普遍用于判斷磁異常有無(wú)的OBF 算法運(yùn)用到磁異常定位中。目前這種利用OBF 實(shí)現(xiàn)磁異常探測(cè)定位的算法,針對(duì)的是信噪比大于0 的情況。對(duì)于信噪比小于0,甚至更低的復(fù)雜噪聲背景下的定位效果還沒(méi)有研究。
本文利用聲吶系統(tǒng)提供測(cè)量的大致方位和距離,結(jié)合正交基函數(shù)天然的規(guī)避噪聲的特性,將OBF 算法結(jié)合L-M 算法改進(jìn),成為可以運(yùn)用到磁異常探測(cè)定位領(lǐng)域中的一種基于聲磁復(fù)合的磁探測(cè)高效算法,有效提升聲吶定位精度。
1 OBF 算法
在傳統(tǒng)的MAD 系統(tǒng)中, 如圖1 搭載有2 個(gè)標(biāo)量磁強(qiáng)計(jì)的探測(cè)平臺(tái)沿著笛卡爾坐標(biāo)系的X軸方向移動(dòng),路徑的方程見(jiàn)式(1)。其中x1為探測(cè)平臺(tái)在X軸的分量初始值,且為負(fù)數(shù),探測(cè)平臺(tái)沿著平行于X軸的直線(xiàn)勻速以v向X軸正方向行進(jìn),經(jīng)過(guò)聲吶的初步探測(cè)定位點(diǎn),把目標(biāo)暫時(shí)假定為坐標(biāo)系原點(diǎn)[8-13]。
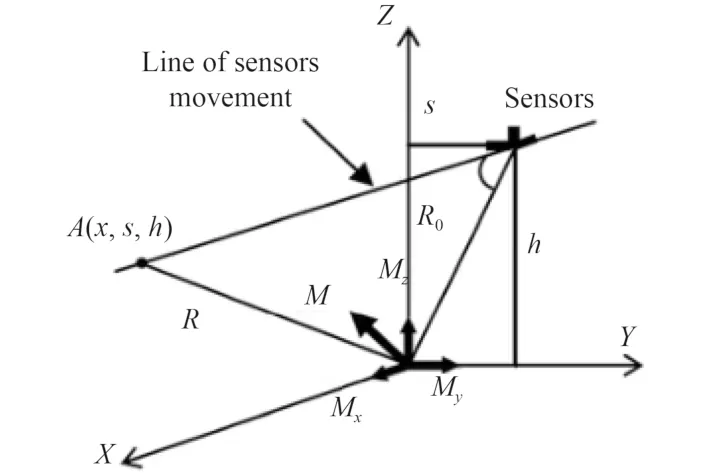
圖1 航空磁異常探測(cè)Fig. 1 Airborne magnetic anomaly detection
假定鐵磁目標(biāo)靜止不動(dòng)。當(dāng)傳感器距離鐵磁目標(biāo)大于目標(biāo)尺寸3 倍時(shí),鐵磁目標(biāo)產(chǎn)生的異常場(chǎng)可以視為偶極子場(chǎng),并且可以描述為:
式中,M為磁偶極矩,r為偶極子到傳感器的位置矢量, μ0是真空的磁導(dǎo)率。磁強(qiáng)計(jì)在軌道上以勻速v平行于x軸的直線(xiàn)上運(yùn)動(dòng):,在t=t0時(shí)刻,傳感器處于離目標(biāo)最近的接近點(diǎn)R0(也即為最短橫距CPA 值)。將代入式(2)化簡(jiǎn),將的每個(gè)分量都可以寫(xiě)成3 個(gè)Anderson 函數(shù)的線(xiàn)性組合
其中, τ為歸一化時(shí)間,t0為傳感器和被測(cè)物最近的時(shí)候(最短橫距為CPA)。
將B化簡(jiǎn)為:
其中:
此時(shí)S可以由3 個(gè)線(xiàn)性無(wú)關(guān)的基函數(shù)的加權(quán)和表示。
可以使用朗斯基行列式證明這3 個(gè)函數(shù)之間是線(xiàn)性無(wú)關(guān)的。
代入測(cè)量的數(shù)據(jù),可以解出y0、R0和ai(i=1,2,3)這5 個(gè)未知數(shù),而且上述過(guò)程假定地磁背景場(chǎng)是均勻的,使用2 個(gè)標(biāo)量傳感器取均值來(lái)計(jì)算更加準(zhǔn)確。
2 探測(cè)定位流程框圖
本文設(shè)計(jì)探測(cè)流程如圖2 所示。由2 個(gè)標(biāo)量磁性傳感器測(cè)得的數(shù)據(jù)加入不同噪聲,再經(jīng)過(guò)數(shù)據(jù)預(yù)處理,結(jié)合聲吶給定初始位置,進(jìn)行L-M 算法的迭代處理,從而得出磁異常的具體參數(shù),并根據(jù)結(jié)果分析驗(yàn)證準(zhǔn)確性。
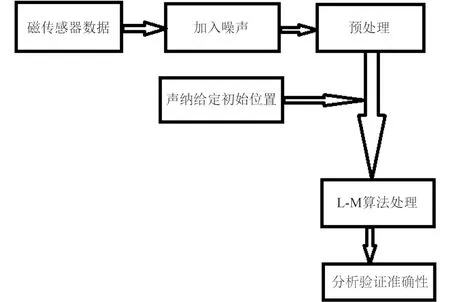
圖2 探測(cè)定位流程框圖Fig. 2 Probe the locating process block diagram
磁異常目標(biāo)位置坐標(biāo)為(x0,y0,z0),2 個(gè)磁傳感器相距1 m,且S1和S2平行于水平面移動(dòng),磁強(qiáng)計(jì)的排布如圖3 所示。將移動(dòng)的方向定義為X軸正方向,則2 個(gè)磁強(qiáng)計(jì)采集的磁異常信號(hào)可以表示為:
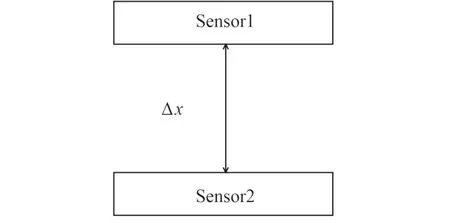
圖3 磁強(qiáng)計(jì)的排布Fig. 3 Magnetic sensor layout
對(duì)于測(cè)量軌跡上的偶極子異常信號(hào)S,其在X方向上的梯度為:
其中:
可以使用朗斯基行列式證明這4 個(gè)函數(shù)之間是線(xiàn)性無(wú)關(guān)的[14-17]。
沿X軸方向的梯度可以由2 個(gè)傳感器的差分近似表達(dá)為:
至此根據(jù)x方向上的梯度得到了如上方程,未知數(shù)仍是x0,y0,z0,R0,ai(i=1,2,3),因而可以根據(jù)最小均方誤差的標(biāo)準(zhǔn),使用Levenberg-Marquardt 算法求解[18-20]。但由于z0只存在于(zs-z0)2這一項(xiàng)中,即z0=-|z0|或者z0=|z0|都滿(mǎn)足最優(yōu)解,在此不直接用LM 算法求出z0,而是使用得到的R0、x0以及z0<zs這一條件唯一確定z0。
3 實(shí)驗(yàn)驗(yàn)證
在數(shù)值驗(yàn)證部分將地磁場(chǎng)視為背景場(chǎng),且認(rèn)為信號(hào)中沒(méi)有噪聲,2 個(gè)磁強(qiáng)計(jì)的數(shù)據(jù)由傳感器測(cè)量得到,如圖4 所示。
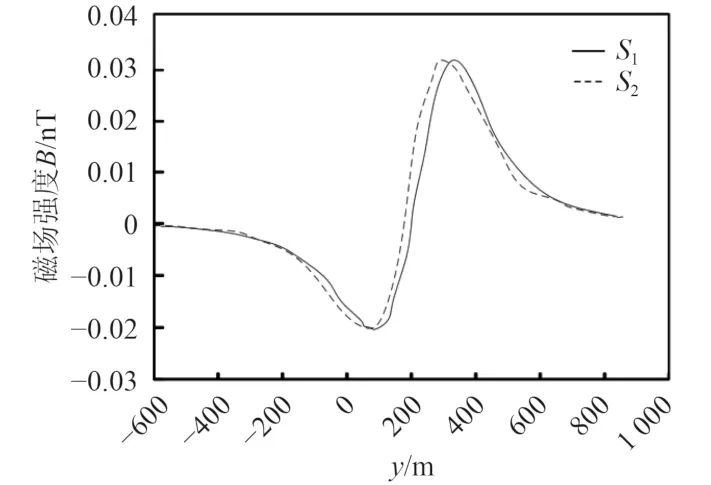
圖4 兩個(gè)磁強(qiáng)計(jì)磁場(chǎng)數(shù)據(jù)Fig. 4 Magnetic data of two magnetic sensors
可以看出由于間距比較小,2 個(gè)磁強(qiáng)計(jì)的數(shù)據(jù)差別非常小。
計(jì)算過(guò)程中zs=100 m,xs=100 m,偶極子位置為(0,0,0),地磁場(chǎng)的磁傾角I=70°,磁偏角D=81°。傳感器間距ΔY=1 m。使用Levenberg-Marquardt 算法求解,但由于z0只存在于(zs-z0)2這一項(xiàng)中,即z0=-|z0|或者z0=|z0|都滿(mǎn)足最優(yōu)解,在此不直接用LM 算法求出z0,而是使用得到的R0、x0以及z0<zs這一條件確定唯 -z0。
可以看出在聲吶系統(tǒng)輔助下,將初始值設(shè)定為0.1,傳感器和被測(cè)物垂直方向距離定位110 m,在運(yùn)算過(guò)程中將b0,b1,b2都定初值為1 時(shí)(b0,b1,b2為L(zhǎng)-M 算法中自主定義的3 個(gè)參數(shù)),Levenberg-Mar quardt 算法經(jīng)過(guò)501 次迭代,擬合效果很好,如圖5所示。
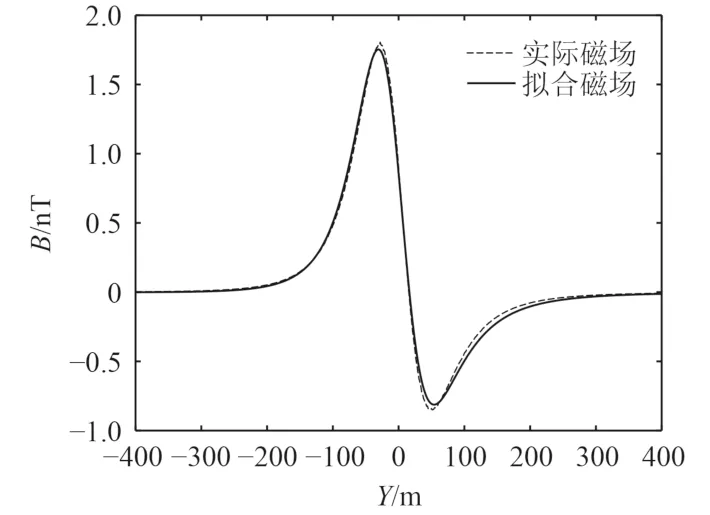
圖5 測(cè)量磁場(chǎng)和擬合磁場(chǎng)對(duì)比Fig. 5 The measurement of magnetic field and the parallel field contrast
接下來(lái)進(jìn)行磁場(chǎng)梯度的驗(yàn)證,按照L-M 算法計(jì)算的結(jié)果(197.90,296.38,-52.19),估計(jì)的誤差較小。使用求解出的系數(shù)代入式(12)、式(8)與式(9)、式(14),得到的梯度與原始數(shù)據(jù)對(duì)比如圖6 所示,擬合的結(jié)果與真實(shí)值非常接近。
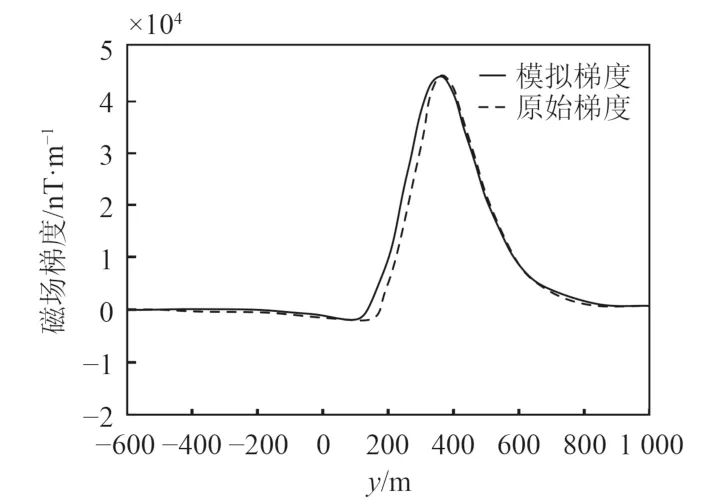
圖6 X 軸方向上的梯度Fig. 6 The gradient of the X-axis
再考慮偶極子朝向的不同,角度的變化也會(huì)導(dǎo)致磁場(chǎng)的結(jié)果隨之發(fā)生改變。隨機(jī)設(shè)置32 組偶極子朝向(θd,βd)組合,并生成仿真數(shù)據(jù),使用算法反演磁異常位置結(jié)果如圖7 所示。
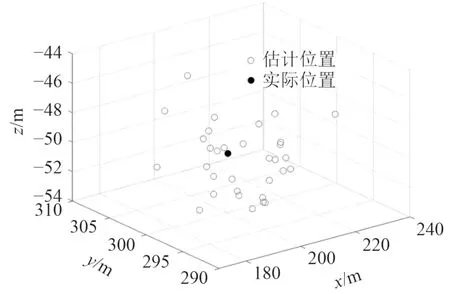
圖7 隨機(jī)偶極子朝向時(shí)的預(yù)估位置和實(shí)際位置對(duì)比Fig. 7 The estimated position of the random dipole is compared to the actual position
可知,在R0=269.26 m的情況下,對(duì)于不同的(θd,βd)組合,x0的求解誤差在±25 m,y0和z0的求解誤差在 ±5 m,說(shuō)明本文方法具有較好的求解精度。
而在實(shí)際探測(cè)到的信號(hào)一般包含各種噪聲。為了檢驗(yàn)本文方法在低信噪比情況下的表現(xiàn),現(xiàn)在對(duì)仿真生成的偶極子信號(hào)人為添加不同強(qiáng)度的噪聲,以模擬不同信噪比下采集到的信號(hào)。所加的噪聲是標(biāo)準(zhǔn)的高斯白噪聲,此處信噪比定義為:
由于磁強(qiáng)計(jì)之間的距離比較近,差分求梯度能在一定程度上減弱噪聲的影響。圖8 為信噪比在-10~10 dB的范圍內(nèi),式(6)中R0的計(jì)算結(jié)果。
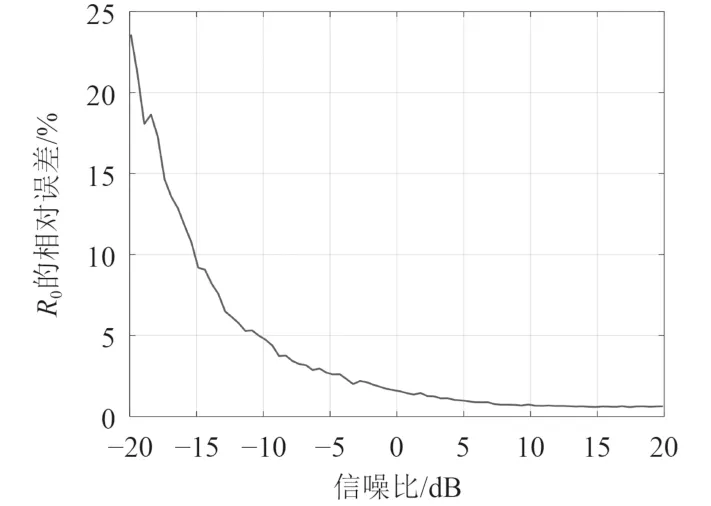
圖8 不同信噪比下 R0的計(jì)算結(jié)果Fig. 8 The results of the different noise ratio of R0
可以看出,本文的解算方法對(duì)噪聲具有一定的適應(yīng)能力。在信噪比為-10 dB的情況下R0的求解相對(duì)誤差小于5%。說(shuō)明算法對(duì)于低信噪比的環(huán)境具有很好的適應(yīng)能力[21-25]
4 結(jié) 語(yǔ)
本文提出一種信號(hào)處理技術(shù),用于定位和識(shí)別一個(gè)模擬為磁偶極子的目標(biāo)。該算法同時(shí)利用了在配備2 個(gè)磁強(qiáng)計(jì)的飛機(jī)上同時(shí)測(cè)量的總磁場(chǎng)和標(biāo)量梯度。對(duì)于不同的實(shí)驗(yàn)情況和噪聲水平,這2 個(gè)量都可以通過(guò)一組安德森型函數(shù)很好地建模。從大量的計(jì)算機(jī)模擬得到的結(jié)果表明,對(duì)目標(biāo)位置的估計(jì)和磁矩精度的預(yù)測(cè)是可以接受的,即使在相當(dāng)?shù)偷男旁氡?10 dB的情況下,從2 個(gè)磁力計(jì)的信號(hào)依然可以較好反演出實(shí)際的磁異常信號(hào)位置。
猜你喜歡
當(dāng)代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂(lè)園·綜合智能(2021年12期)2022-01-18 05:46:42
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
華人時(shí)刊(2020年13期)2020-09-25 08:21:42
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2020年1期)2020-02-20 13:22:30
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
中學(xué)生數(shù)理化·高二版(2016年12期)2017-02-28 10:08:42
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
Coco薇(2016年1期)2016-01-11 16:53:24
