機(jī)載多通道廣角凝視SAR地面動(dòng)目標(biāo)指示技術(shù)研究
2024-01-02 12:19:10安道祥葛蓓蓓陳樂平周智敏
雷達(dá)學(xué)報(bào) 2023年6期
關(guān)鍵詞:檢測
安道祥 葛蓓蓓 王 武 陳樂平 馮 東 周智敏
①(國防科技大學(xué)電子科學(xué)學(xué)院 長沙 410073)
②(復(fù)雜航空系統(tǒng)仿真重點(diǎn)實(shí)驗(yàn)室 北京 100076)
③(中國空氣動(dòng)力研究與發(fā)展中心高速空氣動(dòng)力研究所 綿陽 621000)
1 引言
與可見光、紅外等傳感器相比,合成孔徑雷達(dá)(Synthetic Aperture Radar,SAR)[1]工作于微波波段,因此不受氣候、光照等因素影響,可全天時(shí)全天候?qū)嵤┏上裉綔y。此外,SAR成像能夠獲取目標(biāo)的電磁散射信息,從而為獲取更準(zhǔn)確的目標(biāo)檢測識(shí)別結(jié)果提供支撐。當(dāng)前,SAR技術(shù)已經(jīng)應(yīng)用于戰(zhàn)場偵察、態(tài)勢(shì)感知、精確制導(dǎo)、打擊效果評(píng)估等軍事領(lǐng)域,和地形測繪、國土資源監(jiān)測、科考研究、災(zāi)害預(yù)警與救援等民用領(lǐng)域[2?6]。
在科研工作者的不懈努力下,SAR技術(shù)發(fā)展迅速,功能越來越強(qiáng)大,應(yīng)用范圍越來越廣。例如,SAR成像與地面動(dòng)目標(biāo)指示(Ground Moving Target Indication,GMTI)技術(shù)的有效結(jié)合,使得SAR系統(tǒng)在具備靜止目標(biāo)成像功能外,還兼具運(yùn)動(dòng)目標(biāo)指示功能,從而進(jìn)一步拓展了SAR技術(shù)的應(yīng)用領(lǐng)域。當(dāng)前,國內(nèi)外很多SAR系統(tǒng)都具備同時(shí)SAR成像與GMTI功能,而機(jī)載SAR-GMTI因具有機(jī)動(dòng)靈活、處理效率高等優(yōu)勢(shì),一直是SAR領(lǐng)域內(nèi)的研究熱點(diǎn)之一[7?9]。
眾所周知,絕大多數(shù)機(jī)載SAR系統(tǒng)在成像探測時(shí),都要求雷達(dá)搭載平臺(tái)沿直線軌跡飛行。為便于表述,本文將這種要求雷達(dá)搭載平臺(tái)沿直線軌跡飛行的SAR成像模式稱為直線SAR (Linear SAR,LSAR),而將結(jié)合LSAR成像的GMTI技術(shù),簡稱為LSARGMTI。在LSAR成像中,由于雷達(dá)搭載平臺(tái)始終沿直線軌跡飛行,因此LSAR只能對(duì)觀測場景實(shí)施“掠過式”成像偵察探測,即只能對(duì)待觀測區(qū)域?qū)嵤┒虝r(shí)間、有限觀測角度范圍的成像探測;相應(yīng)地,LSAR-GMTI也只能對(duì)待觀測動(dòng)目標(biāo)實(shí)施“瞬時(shí)”檢測與定位,而無法進(jìn)行持續(xù)跟蹤監(jiān)視[10,11]。
近年來,為了提升SAR對(duì)重點(diǎn)區(qū)域的動(dòng)態(tài)偵察監(jiān)視能力,人們提出了以圓周SAR (Circular SAR,CSAR)[12]為代表的凝視SAR成像技術(shù)。在這種SAR成像模式下,雷達(dá)搭載平臺(tái)沿圓弧、圓周、曲線等特殊軌跡飛行,同時(shí)雷達(dá)天線波束始終指向待成像觀測區(qū)域,從而實(shí)現(xiàn)多(全)方位角度成像和長時(shí)間凝視成像探測。為便于表述,本文將這種SAR成像技術(shù)稱為廣角凝視SAR (Wide angle staring SAR,WasSAR)[13?15]。與LSAR成像相比,WasSAR成像具有多(全)角度成像、視頻成像、長時(shí)間凝視成像、三維成像等諸多優(yōu)點(diǎn)[16?23],從而有效彌補(bǔ)LSAR成像的不足。同樣地,將WasSAR與GMTI相結(jié)合即產(chǎn)生WasSAR-GMTI技術(shù)。與LSARGMTI相比,WasSAR-GMTI兼顧了WasSAR成像與GMTI兩方面優(yōu)點(diǎn),因此可對(duì)觀測區(qū)域內(nèi)出現(xiàn)的動(dòng)目標(biāo)實(shí)施多角度持續(xù)成像跟蹤監(jiān)視[24],和獲取更高精度的動(dòng)目標(biāo)檢測、參數(shù)估計(jì)及定位結(jié)果,提供更加準(zhǔn)確的動(dòng)態(tài)偵察監(jiān)視信息。
2009年,美國空軍實(shí)驗(yàn)室(Air Force Research Laboratory,AFRL)公開了一系列X波段WasSAR實(shí)測數(shù)據(jù),其中包括一段命名為“Gotcha”的三通道WasSAR-GMTI實(shí)測數(shù)據(jù)。該實(shí)測數(shù)據(jù)記錄了一個(gè)合作車輛在美國代頓市路口的行駛過程[12],時(shí)長為71 s。基于該公開實(shí)測數(shù)據(jù),多個(gè)科研團(tuán)隊(duì)開展了WasSAR-GMTI技術(shù)研究,并陸續(xù)發(fā)表了獲得的研究成果[25?31],推動(dòng)了WasSAR-GMTI技術(shù)的發(fā)展。除AFRL外,美國Sandia實(shí)驗(yàn)室在機(jī)載Was-SAR成像技術(shù)方面也開展了深入研究,并實(shí)現(xiàn)了基于WasSAR成像的視頻SAR (Video SAR,ViSAR)成像,獲得了高質(zhì)量高幀率的雷達(dá)視頻影像,實(shí)現(xiàn)了類似于光學(xué)視頻的觀測場景雷達(dá)影像動(dòng)態(tài)感知[32,33]。此外,Sandia實(shí)驗(yàn)室公開了一段錄取于美國某空軍基地附近的ViSAR數(shù)據(jù)[34],視頻時(shí)長約30 s,觀測場景內(nèi)的道路上有多個(gè)行駛車輛。該視頻清晰顯示了SAR圖像中的動(dòng)目標(biāo)陰影,掀起了基于ViSAR動(dòng)目標(biāo)陰影信息提取的動(dòng)目標(biāo)檢測跟蹤研究熱潮[35?37]。2010年和2013年,德國宇航中心利用F-SAR系統(tǒng)在瑞士的H?rkingen開展了WasSAR-GMTI外場飛行試驗(yàn)[38],并完成了相應(yīng)的實(shí)測數(shù)據(jù)處理,同樣驗(yàn)證了WasSAR-GMTI的可行性與實(shí)用性。國內(nèi)的WasSAR-GMTI技術(shù)研究起步較晚,但發(fā)展較快,北京無線電測量研究所[24]、中國科學(xué)院電子學(xué)研究所[39]、南京航空航天大學(xué)[40,41]、西安電子科技大學(xué)[42,43]、國防科技大學(xué)[24,44?54]等單位陸續(xù)開展了WasSAR-GMTI工作,并獲取了一些具有重要價(jià)值的研究成果。
在已有機(jī)載WasSAR-GMTI技術(shù)研究中,主要是基于單通道WasSAR系統(tǒng)開展的雜波譜外快速運(yùn)動(dòng)目標(biāo)檢測跟蹤和動(dòng)目標(biāo)陰影檢測跟蹤。然而,當(dāng)動(dòng)目標(biāo)位于雜波譜內(nèi)時(shí),或動(dòng)目標(biāo)陰影較弱甚至不存在時(shí),基于單通道WasSAR-GMTI難以獲得令人滿意的動(dòng)目標(biāo)檢測跟蹤結(jié)果[42,55]。相比較于單通道WasSAR系統(tǒng),多通道WasSAR-GMTI系統(tǒng)具有更多的空間自由度,更好的雜波抑制能力,適用于各類地面運(yùn)動(dòng)目標(biāo)的檢測跟蹤,因此具有更好的實(shí)用性能和更廣泛的應(yīng)用范圍。目前,國內(nèi)外已有多家單位開展多通道WasSAR-GMTI技術(shù)研究。例如,美國AFRL的Deming等人[29]提出的聯(lián)合沿航跡干涉(Along Track Interferometry,ATI)與相位中心偏置天線(Displaced Phase Center Array,DPCA)方法,實(shí)現(xiàn)了動(dòng)目標(biāo)行駛軌跡重構(gòu);蘇黎世大學(xué)科研人員則基于無跡卡爾曼濾波理論與擴(kuò)展Rao-Blackwellized Monte Carlo粒子濾波,實(shí)現(xiàn)了多目標(biāo)跟蹤[38,56,57]。國內(nèi)方面,哈爾濱工業(yè)大學(xué)的Zhang等人[58]和穆慧琳[59]基于改進(jìn)的高斯混合概率假設(shè)密度濾波器建立WasSAR多目標(biāo)跟蹤模型,具有自適應(yīng)目標(biāo)強(qiáng)度更新能力。目前,國內(nèi)相關(guān)研究仍然以處理國外公開實(shí)測數(shù)據(jù)為主,而利用自主研制機(jī)載WasSAR-GMTI系統(tǒng)開展外場飛行試驗(yàn)與實(shí)測數(shù)據(jù)處理的單位很少,鮮有公開文獻(xiàn)報(bào)道相關(guān)研究成果,因此尚有很多理論問題有待解決與驗(yàn)證。
本文重點(diǎn)介紹了作者團(tuán)隊(duì)近年來在機(jī)載多通道WasSAR-GMTI技術(shù)方面開展的研究工作,具體包括:首先,建立了機(jī)載WasSAR成像下的動(dòng)目標(biāo)回波模型,分析了動(dòng)目標(biāo)特性;然后,基于所建模型,研究了機(jī)載多通道WasSAR-GMTI處理中涉及的平臺(tái)姿態(tài)誤差補(bǔ)償、機(jī)載多通道WasSAR動(dòng)目標(biāo)檢測跟蹤、復(fù)雜路況下的動(dòng)目標(biāo)行駛軌跡重構(gòu)等關(guān)鍵技術(shù),并給出了相應(yīng)的解決方法;最后,實(shí)現(xiàn)了對(duì)環(huán)島等復(fù)雜路網(wǎng)和陸上高架橋等起伏道路上行駛車輛目標(biāo)的持續(xù)跟蹤監(jiān)視。此外,文中還給出了作者團(tuán)隊(duì)利用自主研制機(jī)載多通道WasSAR-GMTI系統(tǒng)開展的外場飛行試驗(yàn)和實(shí)測數(shù)據(jù)處理結(jié)果,驗(yàn)證了論文所提算法的有效性和實(shí)用性,同時(shí)為未來開展進(jìn)一步的理論研究和試驗(yàn)驗(yàn)證提供基礎(chǔ)。
2 機(jī)載多通道WasSAR動(dòng)目標(biāo)建模與特性分析
2.1 機(jī)載多通道WasSAR地面動(dòng)目標(biāo)回波模型
機(jī)載WasSAR成像探測中,雷達(dá)搭載平臺(tái)沿圓弧、圓周、曲線等特殊航跡飛行,同時(shí)雷達(dá)天線波束始終指向待觀測區(qū)域。為便于分析,本文以雷達(dá)搭載平臺(tái)作圓周航跡飛行來建立機(jī)載多通道WasSAR地面動(dòng)目標(biāo)回波模型。如圖1所示,設(shè)雷達(dá)搭載平臺(tái)以角速度ω繞Z軸順時(shí)針旋轉(zhuǎn),即沿著半徑為ra的圓周航跡勻速飛行,飛行高度為H。圖2給出了常規(guī)機(jī)載多通道WasSAR-GMTI系統(tǒng)的天線配置方式,其中多通道天線與載機(jī)機(jī)身平行,沿著圓周的切線方向排列。在慢時(shí)間ta時(shí)刻,第m個(gè)通道的位置Lm(ta)=(Xm(ta),Ym(ta),Zm(ta))T可以表示為
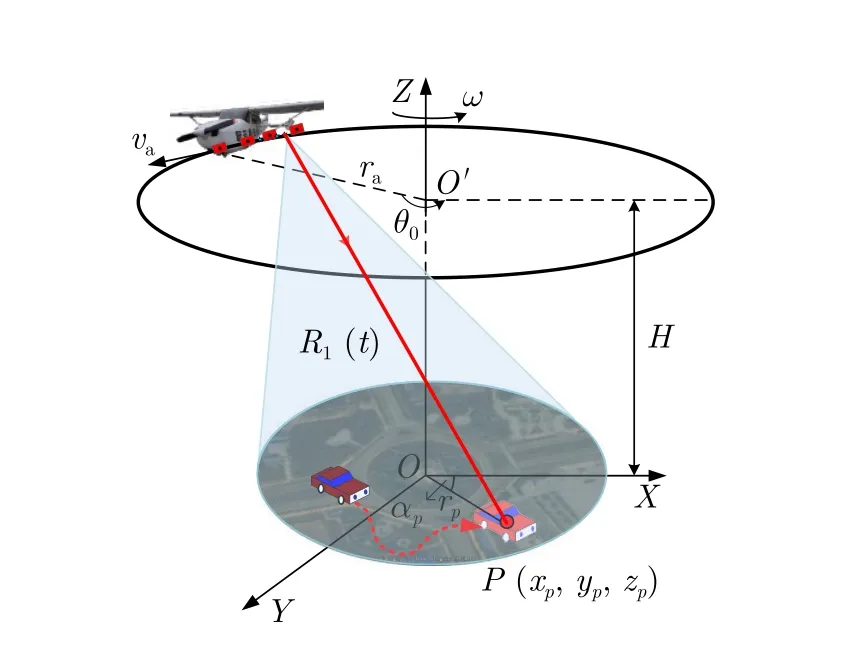
圖1 機(jī)載多通道WasSAR成像幾何Fig.1 The imaging geometry of multi-channel airborne WasSAR

圖2 機(jī)載多通道WasSAR天線配置方式Fig.2 The antenna setting of multi-channel airborne WasSAR
其中,θta=θ0-ωta=θ0-vata/ra為載機(jī)瞬時(shí)方位角,θ0表示初始時(shí)刻載機(jī)的方位角,va表示載機(jī)的線速度,d1m(m=1,2,...,M)為通道m(xù)到通道1的間距。
假設(shè)運(yùn)動(dòng)目標(biāo)P始終處于雷達(dá)有效觀測范圍內(nèi),其瞬時(shí)位置rp(ta)=(xp(ta),yp(ta),zp(ta))T可定義為
其中rp0=(x0,y0,0)T和vp=(vx,vy,0)T分別表示運(yùn)動(dòng)目標(biāo)的初始位置和速度分量。此時(shí),第m通道中的動(dòng)目標(biāo)與雷達(dá)之間的瞬時(shí)距離為
假設(shè)雷達(dá)發(fā)射信號(hào)為線性調(diào)頻信號(hào),信號(hào)帶寬為B,調(diào)頻率為Kr,中心頻率為fc,脈沖持續(xù)時(shí)間為Tp,則通道m(xù)的動(dòng)目標(biāo)回波信號(hào)可以表示為
其中,σp表示目標(biāo)后向散射系數(shù),gm表示每個(gè)通道的二維天線方向圖,c表示光速,r ect[·]表示矩形窗函數(shù),表示快時(shí)間。在WasSAR成像模型中,一般利用觀測場景中心位置O作為參考目標(biāo)點(diǎn),參考距離定義為,以此構(gòu)造參考信號(hào)。基于上述定義,式(4)經(jīng)dechirp接收和去除剩余視頻項(xiàng)(Residual Video Phase,RVP)處理后,沿距離向做傅里葉逆變換(Inverse Fourier Transform,IFT),可得到距離向脈沖壓縮之后的二維時(shí)域回波信號(hào)
2.2 機(jī)載WasSAR動(dòng)目標(biāo)特性分析
傳統(tǒng)SAR成像算法是針對(duì)地面靜止目標(biāo),能夠獲取完整的高分辨成像結(jié)果。動(dòng)目標(biāo)的運(yùn)動(dòng)特性使其回波信號(hào)發(fā)生變化,與參考函數(shù)不匹配,導(dǎo)致能量無法集中,且成像位置發(fā)生偏移。為便于分析動(dòng)目標(biāo)特性,在子孔徑中心ta=tk處對(duì)Rm(ta;rp)(即式(3))進(jìn)行泰勒展開,可得
其中,λ表示信號(hào)波長,表示tk時(shí)刻的載機(jī)方位角,vx與vy分別為運(yùn)動(dòng)目標(biāo)的速度分量,為ta=tk時(shí)刻動(dòng)目標(biāo)速度在雷達(dá)運(yùn)動(dòng)方向上的投影,定義為
運(yùn)動(dòng)目標(biāo)的徑向速度vtr表示為
載機(jī)的徑向速度Vtr表示為
與分別表示tk時(shí)刻的動(dòng)目標(biāo)極徑與極角,其表達(dá)式分別為
其中,(r0cosα0,r0sinα0,0)T表示ta=0時(shí)刻,運(yùn)動(dòng)目標(biāo)的初始位置。
動(dòng)目標(biāo)的運(yùn)動(dòng)特性使其多普勒頻率與靜止目標(biāo)存在差異,從而使得動(dòng)目標(biāo)與靜止目標(biāo)的SAR圖像有所不同。由式(7)可發(fā)現(xiàn),多普勒頻率fa由載機(jī)平臺(tái)運(yùn)動(dòng)產(chǎn)生的多普勒頻率fa_radar和動(dòng)目標(biāo)運(yùn)動(dòng)產(chǎn)生的多普勒頻率fa_mt共同組成,即
其中,
相比于常規(guī)LSAR-GMTI,WasSAR-GMTI能夠?qū)嵤┒嘟嵌乳L時(shí)間持續(xù)成像探測,其變化的幾何關(guān)系引起了不同子孔徑下的動(dòng)目標(biāo)相對(duì)速度差異,這使得WasSAR中的動(dòng)目標(biāo)偏移與散焦變得更加復(fù)雜。本文采用仿真實(shí)驗(yàn),定性分析動(dòng)目標(biāo)在Was-SAR圖像中呈現(xiàn)出的特性。仿真實(shí)驗(yàn)的機(jī)載雷達(dá)系統(tǒng)設(shè)置見表1。第1組仿真實(shí)驗(yàn)用于驗(yàn)證全孔徑內(nèi)動(dòng)目標(biāo)圖像特性。本實(shí)驗(yàn)設(shè)置兩個(gè)初始位置為(-50 m,-50 m,0 m)的動(dòng)目標(biāo),其中一個(gè)動(dòng)目標(biāo)做勻速直線運(yùn)動(dòng),另一個(gè)動(dòng)目標(biāo)模擬經(jīng)過轉(zhuǎn)盤路口依次作“勻速直線—?jiǎng)蛩偾€—?jiǎng)蛩僦本€”運(yùn)動(dòng)。
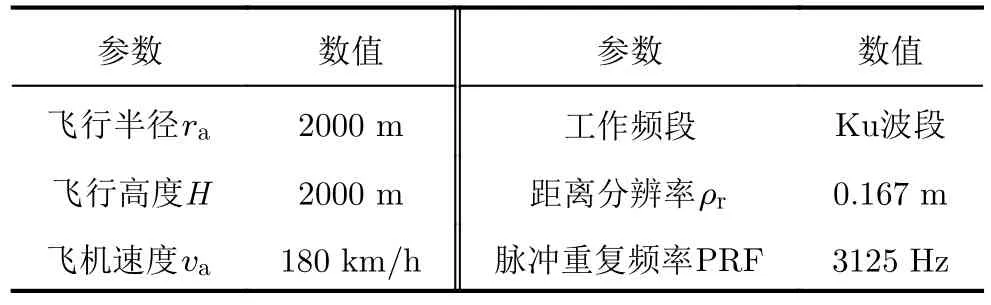
表1 機(jī)載WasSAR系統(tǒng)仿真參數(shù)Tab.1 The simulated parameters of airborne WasSAR system
圖3給出了兩種不同運(yùn)動(dòng)的仿真實(shí)驗(yàn)結(jié)果,其中紅色曲線為運(yùn)動(dòng)目標(biāo)真實(shí)軌跡,白色曲線為成像處理后的實(shí)際位置偏移。觀察圖3可發(fā)現(xiàn),WasSAR成像后,運(yùn)動(dòng)目標(biāo)發(fā)生散焦,且行駛軌跡也發(fā)生嚴(yán)重偏移。此外,由于不同成像觀測角度下的運(yùn)動(dòng)目標(biāo)的速度投影分量不同,導(dǎo)致各子孔徑下的動(dòng)目標(biāo)圖像特性存在差異。該圖為WasSAR的360°全孔徑成像結(jié)果,既證明了WasSAR中運(yùn)動(dòng)目標(biāo)的復(fù)雜特性,又表明了多子孔徑劃分的必要性。

圖3 兩種不同運(yùn)動(dòng)的仿真實(shí)驗(yàn)結(jié)果Fig.3 The simulation results of two typical motions
第2組仿真實(shí)驗(yàn),驗(yàn)證子孔徑內(nèi)動(dòng)目標(biāo)圖像散焦與偏移特性。為便于成像觀測,將觀測場景大小設(shè)為100 m,脈沖重復(fù)頻率修改為120 Hz。動(dòng)目標(biāo)參數(shù)設(shè)置為x0=y0=0 m,vx=0.6 m/s,vy=0.2 m/s,并在同一位置設(shè)置一個(gè)靜止目標(biāo),以供參考對(duì)照。選取視線(Line of Sight,LOS)方向作為子孔徑中心進(jìn)行分析。由于不同運(yùn)動(dòng)參數(shù)的耦合性,在分析某一參數(shù)的影響時(shí),將其他運(yùn)動(dòng)參數(shù)置零。圖4為靜止目標(biāo)成像結(jié)果,圖5與圖6分別給出了vx與vy對(duì)動(dòng)目標(biāo)成像的影響仿真結(jié)果。可以發(fā)現(xiàn),vx主要導(dǎo)致方位散焦,且散焦后目標(biāo)能量擴(kuò)散,vy主要導(dǎo)致方位位置偏移。例如,當(dāng)vy=0.2 m/s時(shí),動(dòng)目標(biāo)朝載機(jī)運(yùn)動(dòng)方向偏移8 m,但聚焦質(zhì)量良好。
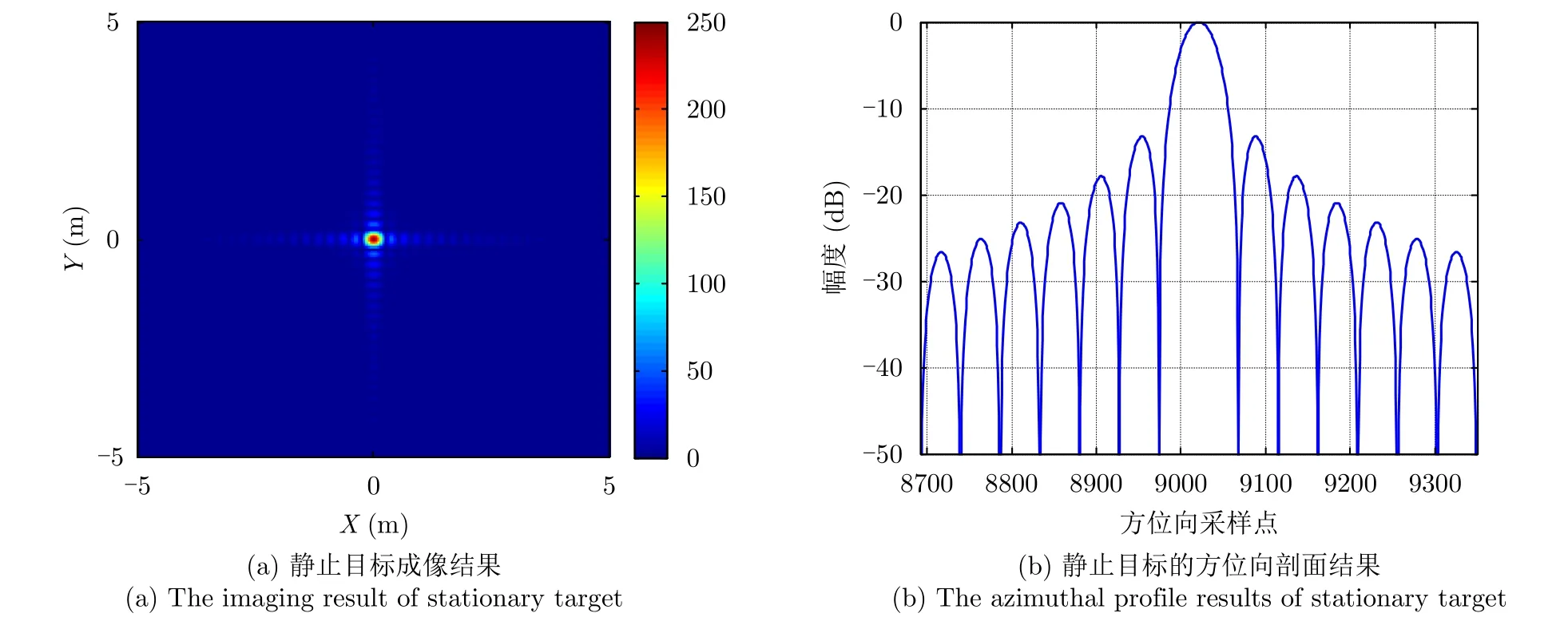
圖4 靜止目標(biāo)成像Fig.4 The results of stationary target
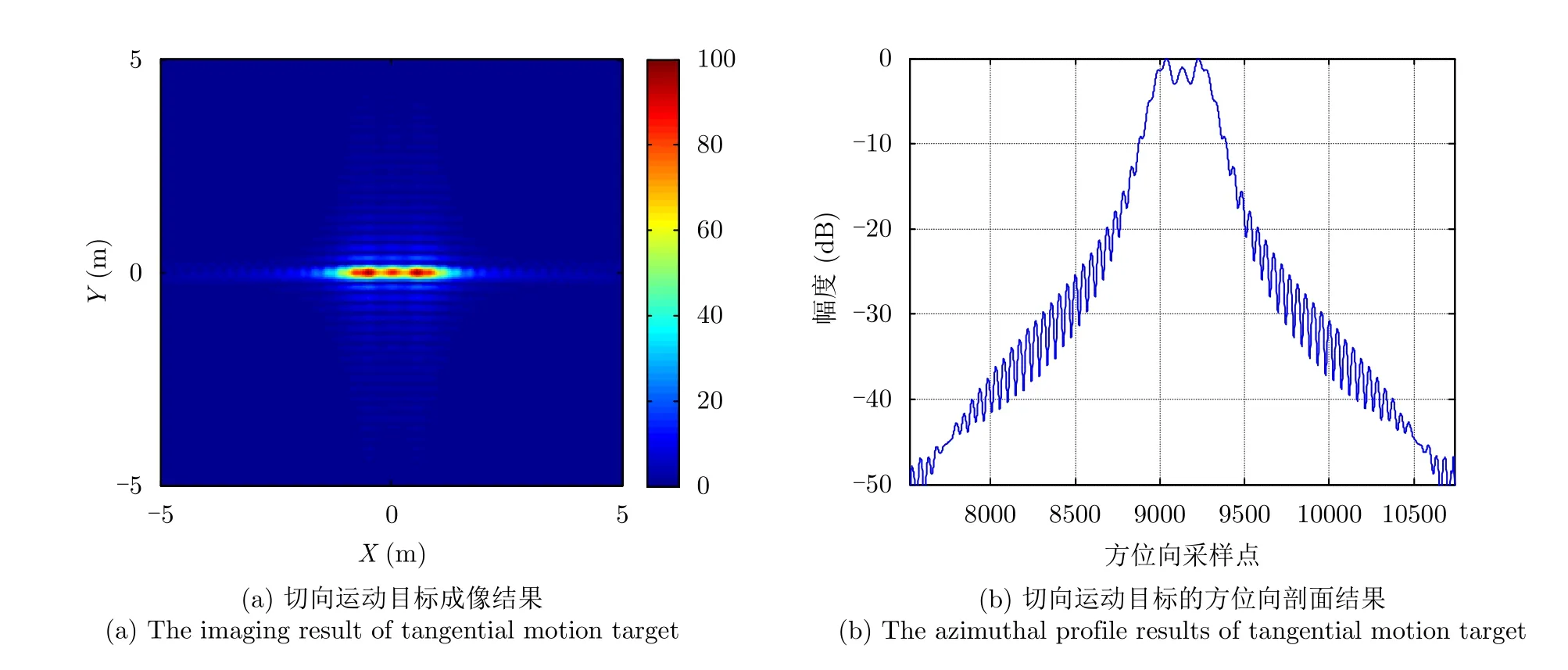
圖5 當(dāng) vx=0.6 m/s時(shí)的運(yùn)動(dòng)目標(biāo)成像Fig.5 The imaging results of moving target (vx=0.6 m/s)
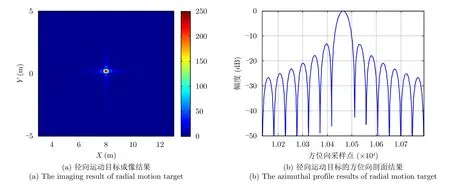
圖6 當(dāng) vy=0.2 m/s時(shí)的運(yùn)動(dòng)目標(biāo)成像Fig.6 The imaging results of moving target (vy=0.2 m/s)
需要說明的是,較大的vy會(huì)導(dǎo)致嚴(yán)重的多普勒頻移。這種情況下,部分信號(hào)能量被混疊,產(chǎn)生虛假目標(biāo)。如圖7所示,當(dāng)vy=2 m/s時(shí),動(dòng)目標(biāo)的多普勒頻率超出PRF有效范圍,因此真實(shí)成像位置偏移至觀測范圍 (-50 m,50 m)外,從而在有效觀測范圍內(nèi)出現(xiàn)模糊成像位置。為了降低模糊性影響,可選擇提高PRF。為了確保目標(biāo)至少一半信號(hào)能量位于PRF頻帶內(nèi),其多普勒頻移必須滿足|fac|≤PRF/2。
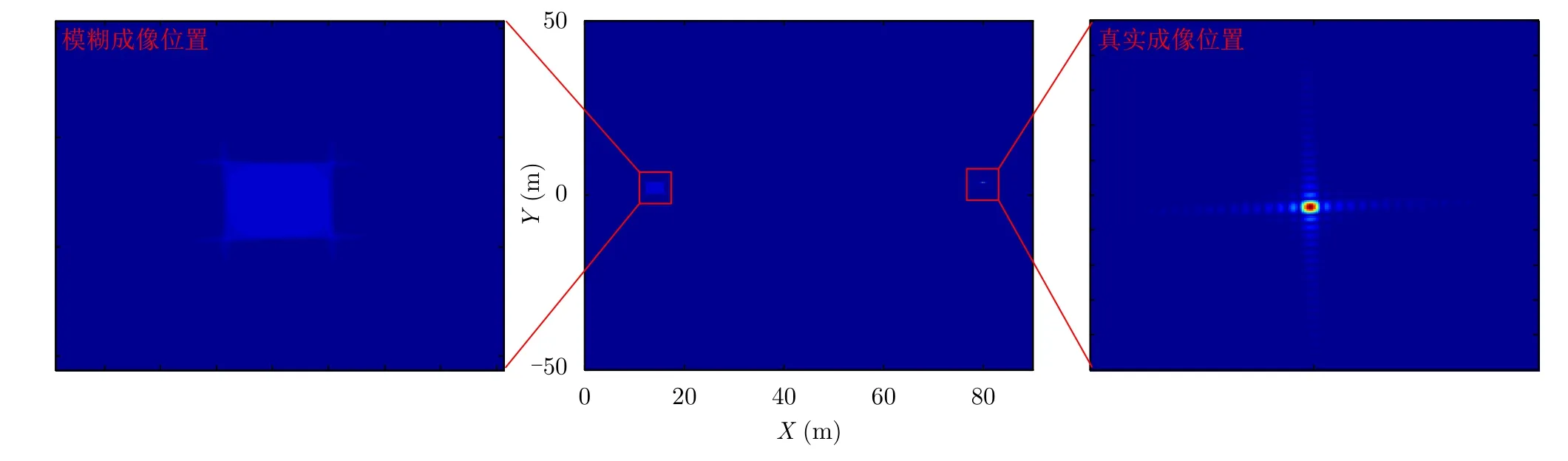
圖7 當(dāng) vy=2 m/s時(shí)的運(yùn)動(dòng)目標(biāo)成像Fig.7 The imaging results of moving target (vy=2 m/s)
3 機(jī)載多通道WasSAR誤差分析與校正
理想情況下,通過多通道聯(lián)合處理,能夠獲取良好的WasSAR-GMTI結(jié)果。然而,在實(shí)際多通道系統(tǒng)中,各通道天線差異、非理想平臺(tái)姿態(tài)等實(shí)際因素會(huì)引入各類誤差,影響WasSAR-GMTI性能。因此,有必要對(duì)多通道誤差進(jìn)行分析與校正。
3.1 平臺(tái)姿態(tài)誤差校正
理想情況下,通過時(shí)延誤差補(bǔ)償可實(shí)現(xiàn)多通道之間的配準(zhǔn)處理,進(jìn)而獲得動(dòng)目標(biāo)干涉相位,以實(shí)現(xiàn)動(dòng)目標(biāo)檢測。但在實(shí)際機(jī)載WasSAR-GMTI探測中,載機(jī)不可能保持理想飛行姿態(tài),因此將引入通道間的垂直基線分量,造成空變的偏移相位誤差。圖8以雙通道WasSAR-GMTI系統(tǒng)為例,展示了載機(jī)非理想姿態(tài)示意圖,其中通道1與通道2的理想位置分別為與。假設(shè)通道1始終保持理想位置,即實(shí)際位置c1與理想位置重合,而通道2的實(shí)際位置c2隨飛機(jī)姿態(tài)變化而發(fā)生變化。此外,d為實(shí)際基線長度,dr與dz分別為水平面向與高度向的基線分量,φp與φy分別為俯仰角與偏航角。

圖8 平臺(tái)姿態(tài)誤差模型Fig.8 The model of platform error
載機(jī)的非理想飛行姿態(tài)將產(chǎn)生額外的偏移相位誤差,這會(huì)造成動(dòng)目標(biāo)檢測后的雜波殘余,將影響目標(biāo)參數(shù)估計(jì),甚至惡化動(dòng)目標(biāo)跟蹤與軌跡重構(gòu)性能[60]。由于偏移相位誤差具有空變性,因此可采用圖9所示的分步方法來校正相移誤差。

圖9 偏移相位校正流程圖Fig.9 The flowchart of group phase shift calibration
實(shí)際機(jī)載多通道WasSAR回波中,姿態(tài)誤差引入偏移相位分量 Δ?s為
在WasSAR成像中,觀測場景寬度一般小于場景中心點(diǎn)到雷達(dá)的距離,因而可將偏移相位誤差Δ?s分解為參考斜距處的一次校正分量 Δ?ref與剩余二次校正分量 Δ?δ,即
定義 dRref(ta;r0) 與 dRδ(ta;rt)是與之匹配的距離分量,r0為參考目標(biāo)點(diǎn),rt為任意靜止目標(biāo)點(diǎn)。則參考斜距誤差分量的補(bǔ)償函數(shù)可表示為
利用式(18)在距離頻域?qū)⒖夹本嗾`差分量進(jìn)行補(bǔ)償,實(shí)現(xiàn)一次相位校正。針對(duì)空變的剩余分量dRδ(ta;rt)=dR2(ta;rt)-dRref(ta;r0),在二維時(shí)域構(gòu)造校正函數(shù),即
利用式(19),即可完成對(duì)空變的剩余分量補(bǔ)償。
圖10為機(jī)載雙通道X波段WasSAR-GMTI實(shí)測數(shù)據(jù)(即Gotcha數(shù)據(jù))的距離多普勒域偏移相位校正結(jié)果。圖10(a)與圖10(b)分別為式(18)與式(19)展示的相位補(bǔ)償分量,將兩者作用于圖10(c)所示的原始干涉相位圖,則得到圖10(d)。對(duì)比圖10(c)和圖10(d)可發(fā)現(xiàn),相位的傾斜變化量得到有效校正。為了更加直觀地驗(yàn)證所提方法的有效性,我們又對(duì)比了成像結(jié)果。圖11(a)為BP成像結(jié)果,該地區(qū)包含平坦路面與復(fù)雜建筑群。圖11(b)與圖11(c)分別為不進(jìn)行偏移相位校正的DPCA幅度結(jié)果與ATI干涉相位結(jié)果。可發(fā)現(xiàn),若忽略平臺(tái)姿態(tài)誤差,背景雜波無法完全被抑制,相位與幅度殘余均較為明顯,易致使弱目標(biāo)被淹沒而漏警率增大。圖11(d)與圖11(e)分別為偏移相位校正后的DPCA幅度結(jié)果與ATI干涉相位結(jié)果。可明顯地看出由姿態(tài)誤差引入的雜波殘余被有效消除。

圖10 偏移相位校正結(jié)果對(duì)比Fig.10 The comparison results of group phase shift calibration

圖11 雙通道WasSAR-GMTI檢測結(jié)果Fig.11 The detection results of dual-channel WasSAR-GMTI
3.2 多通道誤差校正
除飛機(jī)的飛行姿態(tài)誤差外,多通道WasSAR-GMTI性能還受系統(tǒng)因素制約,如頻率響應(yīng)誤差、天線空域響應(yīng)誤差與時(shí)延誤差等[61]。這些誤差項(xiàng)雖相互獨(dú)立,但都會(huì)引起雜波信號(hào)去相關(guān)。相較于時(shí)延誤差,二維響應(yīng)誤差補(bǔ)償更具挑戰(zhàn)性,因此下面對(duì)其作詳細(xì)分析。
根據(jù)影響因素的差異,天線的空域響應(yīng)誤差D(fa)包含波束指向偏差與方向圖差異。由于工藝水平限制,各通道的天線不可避免地存在差異,從而引起通道的頻率特性差異。此外,波束指向性偏差可分解為順軌方向與交軌方向兩個(gè)分量。交軌分量導(dǎo)致隨距離空變的指向偏差,可將其歸類到姿態(tài)誤差中進(jìn)行校正。天線方位角與觀測目標(biāo)多普勒頻率呈對(duì)應(yīng)關(guān)系,因此順軌分量將產(chǎn)生多普勒頻偏誤差,降低通道間的相關(guān)性。順軌天線分量的空域響應(yīng)誤差表現(xiàn)形式與系統(tǒng)頻率響應(yīng)一致,區(qū)別在于其表現(xiàn)域?yàn)榉轿欢嗥绽沼蚨皇蔷嚯x頻域,但補(bǔ)償方法可與之類比。
綜上所述,系統(tǒng)頻率響應(yīng)誤差與天線空域響應(yīng)誤差均屬于頻域乘性誤差,將降低通道間的相關(guān)性,故適合在二維頻域內(nèi)補(bǔ)償。為此,Ender[62]提出了一種基于最小二乘優(yōu)化的二維自適應(yīng)校正(Adaptive 2D-Calibration,A2DC)算法,利用迭代自適應(yīng)方式在二維頻域同步校正幅度與相位誤差。然而,A2DC利用方差最小化實(shí)現(xiàn)通道間的誤差校正,雖然處理效率高,但該方法對(duì)異常值很敏感。換言之,A2DC需要校正的是各通道間的靜止雜波差異,但若樣本中存在強(qiáng)運(yùn)動(dòng)目標(biāo),則會(huì)產(chǎn)生較大的估計(jì)偏差,進(jìn)而導(dǎo)致靜止目標(biāo)“欠校正”,同時(shí)運(yùn)動(dòng)目標(biāo)“過校正”,即將運(yùn)動(dòng)目標(biāo)視為雜波而被消除,靜止目標(biāo)則被視為有效動(dòng)目標(biāo)而得以保留。針對(duì)這個(gè)問題,本文在上述方法基礎(chǔ)上,提出了一種改進(jìn)二維自適應(yīng)校正(Modified A2DC,MA2DC)算法(如圖12所示),以保證補(bǔ)償因子中相位估計(jì)量的穩(wěn)健性。
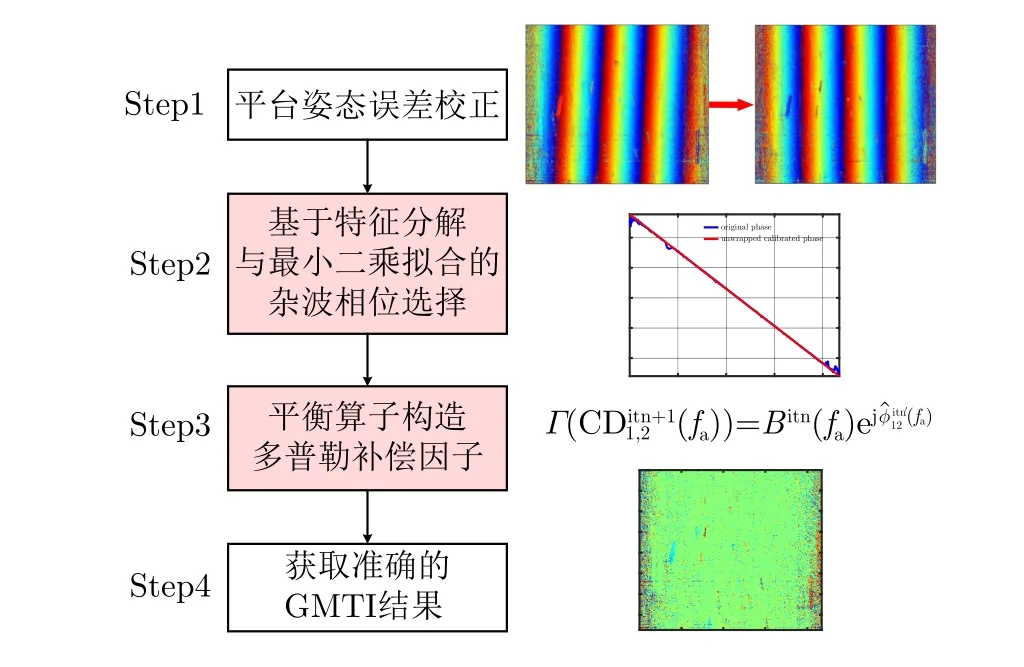
圖12 MA2DC處理流程圖Fig.12 The flowchart of MA2DC
采樣數(shù)據(jù)集合定義為Slr(fa),其中l(wèi)r表示距離門。由此構(gòu)成的功率譜表示為
其中,
為驗(yàn)證所提MA2DC方法的有效性,在圖10(d)基礎(chǔ)上,對(duì)Gotcha數(shù)據(jù)進(jìn)行通道誤差校正。圖13(a)與圖13(b)分別為傳統(tǒng)A2DC算法與所提MA2DC算法的處理結(jié)果。可發(fā)現(xiàn),經(jīng)過A2DC算法處理后,紅框內(nèi)主瓣區(qū)的強(qiáng)運(yùn)動(dòng)目標(biāo)被“過校正”,而同多普勒單元內(nèi)的雜波信息被錯(cuò)誤保留,同時(shí)旁瓣區(qū)黑圈內(nèi)的有用信息被過渡平滑。對(duì)比之下,MA2DC算法能夠正確且有效地保留動(dòng)目標(biāo)信息,實(shí)現(xiàn)良好的通道均衡效果。進(jìn)一步地,利用圖14的成像結(jié)果對(duì)比MA2DC算法的性能優(yōu)勢(shì)。可以看出,MA2DC算法能夠有效保留運(yùn)動(dòng)目標(biāo)幅度與相位信息,而A2DC結(jié)果中的運(yùn)動(dòng)目標(biāo)相位被過度校正,且存在明顯的雜波殘余。

圖13 通道誤差校正后的RD域干涉相位結(jié)果Fig.13 The results of interferometric phase after channel error calibration

圖14 通道誤差校正后的圖像域DPCA檢測結(jié)果與ATI檢測結(jié)果Fig.14 The detection results of DPCA and ATI after channel error calibration
4 機(jī)載多通道WasSAR動(dòng)目標(biāo)檢測與跟蹤
第3節(jié)主要介紹了多通道WasSAR-GMTI系統(tǒng)的誤差校正方法。在上述研究基礎(chǔ)上,本節(jié)將繼續(xù)介紹機(jī)載多通道WasSAR動(dòng)目標(biāo)檢測與跟蹤方法,并為后續(xù)的動(dòng)目標(biāo)軌跡重構(gòu)處理奠定基礎(chǔ)。GMTI的前提是從背景雜波中,檢測出運(yùn)動(dòng)目標(biāo),并分離和提取地面動(dòng)目標(biāo)回波。為此,本文提出了一種機(jī)載多通道WasSAR地面動(dòng)目標(biāo)檢測與跟蹤算法。如圖15所示,首先,聯(lián)合雜波抑制干涉(Clutter Suppression Interferometry,CSI)與松弛(RELAX)算法實(shí)現(xiàn)慢速運(yùn)動(dòng)目標(biāo)檢測;然后,聯(lián)合多子孔徑數(shù)據(jù),結(jié)合相位特征輔助的近鄰搜索(Phase-aided Neighbor Search,PNS)方法與一步預(yù)測(One-Step Predict,OSP)方法,實(shí)現(xiàn)距離多普勒域(Range-Doppler,RD)內(nèi)的多目標(biāo)軌跡跟蹤。
4.1 運(yùn)動(dòng)目標(biāo)檢測
運(yùn)動(dòng)目標(biāo)檢測是實(shí)施跟蹤的前提和基礎(chǔ)。對(duì)于多普勒頻率位于雜波區(qū)外的快速運(yùn)動(dòng)目標(biāo),可以通過多普勒濾波方法實(shí)現(xiàn)檢測。但對(duì)于多普勒頻率位于雜波區(qū)內(nèi)的慢速運(yùn)動(dòng)目標(biāo)來說,由于偏移位置仍在雜波區(qū)內(nèi),因此靜止雜波與運(yùn)動(dòng)目標(biāo)難以分離,從而增加了慢速運(yùn)動(dòng)目標(biāo)的檢測難度。此外,受動(dòng)目標(biāo)速度、路面材質(zhì)與子孔徑時(shí)間選取等因素影響,利用陰影信息實(shí)現(xiàn)慢速運(yùn)動(dòng)目標(biāo)檢測的魯棒性較差。因此,利用多通道WasSAR系統(tǒng)實(shí)施運(yùn)動(dòng)目標(biāo)檢測仍是最穩(wěn)健、最可靠的技術(shù)途徑。
常見的多通道聯(lián)合處理方法(如ATI和DPCA)雖操作簡單,并在工程實(shí)踐中運(yùn)用廣泛,但DPCA效果受限于嚴(yán)格的平臺(tái)運(yùn)動(dòng)狀態(tài),且ATI易受背景雜波干擾的影響,導(dǎo)致實(shí)際性能不佳。為此,本文針對(duì)多通道WasSAR-GMTI系統(tǒng)特點(diǎn),提出了一種聯(lián)合CSI與RELAX算法的C-RELAX檢測方法,通過全局CSI與局部RELAX處理,高效且準(zhǔn)確地實(shí)現(xiàn)復(fù)雜場景下的運(yùn)動(dòng)目標(biāo)檢測。
圖16為機(jī)載Ku波段WasSAR-GMTI系統(tǒng)獲取的子孔徑實(shí)測RD域回波數(shù)據(jù)的CSI檢測與RELAX檢測結(jié)果。可以看到,經(jīng)過CSI處理后,共檢測出39個(gè)備選運(yùn)動(dòng)目標(biāo),除實(shí)際運(yùn)動(dòng)目標(biāo)外,還包含一些強(qiáng)雜波與噪聲虛警。之后,經(jīng)過進(jìn)一步RELAX處理,8個(gè)虛警目標(biāo)被抑制。利用2.4 GHz Intel處理器,32 GB內(nèi)存的計(jì)算機(jī)處理 8140×2048像素的子孔徑數(shù)據(jù),全局RELAX耗時(shí)13.69 h,而所提C-RELAX方法的處理時(shí)間為275.45 s。綜上所述,所提C-RELAX聯(lián)合策略能夠克服CSI算法中的高虛警問題與RELAX算法處理效率低的問題。

圖16 機(jī)載WasSAR子孔徑回波、CSI及RELAX檢測結(jié)果Fig.16 The sub-aperture echo of airborne WasSAR,CSI and RELAX detection results
4.2 多目標(biāo)軌跡跟蹤
動(dòng)目標(biāo)RD域跟蹤是獲取動(dòng)目標(biāo)真實(shí)行駛軌跡的基礎(chǔ)。在動(dòng)目標(biāo)檢測步驟中已獲取動(dòng)目標(biāo)在某一子孔徑下的RD域點(diǎn)跡坐標(biāo)。之后,需要通過跟蹤算法,實(shí)現(xiàn)多子孔徑動(dòng)目標(biāo)RD域點(diǎn)跡關(guān)聯(lián),該點(diǎn)跡精度直接決定后續(xù)動(dòng)目標(biāo)軌跡重構(gòu)精度。需要注意的是,目標(biāo)運(yùn)動(dòng)引入的散焦特性使得動(dòng)目標(biāo)存在較大的距離走動(dòng),影響動(dòng)目標(biāo)點(diǎn)跡坐標(biāo)測量精度。為此,本文采用Keystone算法校正動(dòng)目標(biāo)距離走動(dòng),提高了動(dòng)目標(biāo)的RD域聚焦質(zhì)量,獲得更加精確的距離和多普勒測量值,其中j=1,2,...,J表示子孔徑內(nèi)的動(dòng)目標(biāo)數(shù)目,k表示子孔徑序列。
在獲得單子孔徑動(dòng)目標(biāo)位置測量值后,需要實(shí)現(xiàn)子孔徑間多目標(biāo)關(guān)聯(lián),獲得動(dòng)目標(biāo)在RD域內(nèi)的軌跡。文獻(xiàn)[47]利用最近鄰搜索(Nearest Neighbor Search,NNS)和OSP實(shí)現(xiàn)RD域多目標(biāo)跟蹤。該方法適用于雜波譜外干凈背景下的快速運(yùn)動(dòng)目標(biāo),但在雜波譜內(nèi)慢速運(yùn)動(dòng)目標(biāo)跟蹤中受限。因?yàn)閺?fù)雜背景中殘余的虛警目標(biāo)可能與真實(shí)目標(biāo)混淆,導(dǎo)致多目標(biāo)跟蹤持續(xù)出錯(cuò)。為此,本文提出了一種相位特征輔助的近鄰搜索方法,并結(jié)合一步預(yù)測實(shí)現(xiàn)復(fù)雜環(huán)境下的RD域多目標(biāo)跟蹤,利用連續(xù)幀內(nèi)運(yùn)動(dòng)目標(biāo)相位的規(guī)律性變化,而虛警目標(biāo)相位的不規(guī)律跳變來分辨目標(biāo)屬性。結(jié)合動(dòng)目標(biāo)相位信息,得到第j個(gè)動(dòng)目標(biāo)的跟蹤集合
利用距離與多普勒頻率L1范數(shù)得到當(dāng)前第k個(gè)子孔徑候選集合Vk,gk與前k-1子 孔徑跟蹤集合Wk-1,j之間的距離,并根據(jù)距離對(duì)候選集合升序排列。之后,將候選集合中的目標(biāo)干涉相位與閾值?th比較,實(shí)現(xiàn)多目標(biāo)跟蹤匹配。而一步預(yù)測是利用第(k-1)幀與第 (k-2)幀子孔徑
獲取第k幀的預(yù)測集合。在多目標(biāo)跟蹤過程中,為提高魯棒性,要避免出現(xiàn)相鄰兩幀軌跡都是預(yù)測值的情況。因此,在完成一步預(yù)測后,重復(fù)近鄰搜索步驟。若經(jīng)過近鄰搜索與一步預(yù)測后,第k個(gè)子孔徑仍有未匹配的目標(biāo),則以該目標(biāo)為起始點(diǎn)添加新的跟蹤序列。
圖17為機(jī)載Ku波段WasSAR實(shí)測數(shù)據(jù)的動(dòng)目標(biāo)RD域跟蹤結(jié)果,用顏色區(qū)分多目標(biāo)軌跡,其中紅、黑與藍(lán)色虛線分別為合作車輛A,B與C的部分真實(shí)軌跡。可以看出,圖17(b)中的紅色曲線1與綠色曲線2因NNS-OSP算法未考慮相位的突變性而產(chǎn)生錯(cuò)誤,黑色軌跡曲線3與另一目標(biāo)的軌跡相連,將二者誤判為同一目標(biāo)軌跡。相比之下,圖17(a)所示的PNS-SOP方法能夠有效改善上述情況,獲得更準(zhǔn)確的多目標(biāo)跟蹤效果。

圖17 不同跟蹤算法下的RD域多目標(biāo)軌跡對(duì)比圖Fig.17 The comparison results of multiple target trajectory in RD domain by different tracking algorithms
5 機(jī)載多通道WasSAR動(dòng)目標(biāo)行駛軌跡重構(gòu)
在傳統(tǒng)LSAR成像中,合成孔徑時(shí)間通常較短,且只能在單一側(cè)視模式內(nèi)獲得有限角度的動(dòng)目標(biāo)信息,這使得LSAR-GMTI難以對(duì)運(yùn)動(dòng)目標(biāo)實(shí)施長時(shí)間持續(xù)成像探測。相比之下,WasSAR的長時(shí)間凝視成像探測為獲取運(yùn)動(dòng)目標(biāo)的完整軌跡提供了有利條件,從而可進(jìn)一步提升動(dòng)目標(biāo)的跟蹤監(jiān)視能力。為使研究成果能夠更加貼近實(shí)際情況,我們分平坦路面和起伏路面兩種情況來探究動(dòng)目標(biāo)行駛軌跡重構(gòu)問題,并分別給出相應(yīng)的重構(gòu)方法。
5.1 平坦路面動(dòng)目標(biāo)行駛軌跡重構(gòu)
實(shí)際應(yīng)用中,氣流擾動(dòng)對(duì)機(jī)載SAR成像的影響較大,導(dǎo)致雷達(dá)天線波束指向不穩(wěn)定。因此,為了建立準(zhǔn)確機(jī)載WasSAR成像模型,需要利用GPS/慣導(dǎo)等測量設(shè)備來獲取橫滾、偏航、俯仰等飛行平臺(tái)姿態(tài)信息[65]。圖18給出了機(jī)載WasSAR成像幾何示意圖,其中非理想情況下LOS方向的方位矢量可表示為

圖18 機(jī)載WasSAR成像幾何示意圖Fig.18 The imaging geometry of airborne WasSAR
其中,φy,φr,θde分別為偏航角、橫滾角與理想觀φp測角,J為俯仰角 。
其中,n與L1分別表示單位矢量與雷達(dá)位置。此時(shí),r0的指向坐標(biāo)為 (Xr0,Yr0,0),利用新的r0可以獲取非理想運(yùn)動(dòng)狀態(tài)的動(dòng)目標(biāo)多普勒模型(tk;rp)與(tk;rp),從而使參數(shù)估計(jì)模型更加準(zhǔn)確。然而,由于機(jī)載WasSAR的運(yùn)動(dòng)參數(shù)耦合嚴(yán)重,所有參數(shù)共同影響多普勒信息,從而易造成參數(shù)估計(jì)誤差。為提升WasSAR-GMTI動(dòng)目標(biāo)軌跡重構(gòu)精度,本文提出了一種兩級(jí)參數(shù)估計(jì)(Two-Stage Parameter Estimation,TSPE)方法,其處理流程如圖19所示。

圖19 TSPE處理流程圖Fig.19 The flowchart of TSPE method
如圖19所示,所提TSPE主要包含兩個(gè)步驟:
步驟1 運(yùn)動(dòng)參數(shù)粗估計(jì)。基于C-RELAX算法獲取目標(biāo)的徑向速度,根據(jù)實(shí)際動(dòng)目標(biāo)距離、多普勒頻率、干涉相位與空間位置幾何關(guān)系聯(lián)立方程組,得到動(dòng)目標(biāo)的運(yùn)動(dòng)參數(shù)U=[xp,yp,vx,vy]T。
步驟2 運(yùn)動(dòng)參數(shù)精估計(jì)。利用多普勒補(bǔ)償進(jìn)行精估計(jì),結(jié)合對(duì)比度最優(yōu)法將參數(shù)估計(jì)問題轉(zhuǎn)化為多普勒信息估計(jì)與補(bǔ)償問題。依次利用
對(duì)通道m(xù)回波數(shù)據(jù)進(jìn)行補(bǔ)償。其中,ηa是Keystone變換后的慢時(shí)間,fr,fa,fac,m以及Ka,m分別表示距離頻率、多普勒頻率、第m個(gè)通道中運(yùn)動(dòng)目標(biāo)的多普勒中心頻率與多普勒調(diào)頻率。H1m與H2m均為與運(yùn)動(dòng)參數(shù)U相關(guān)的補(bǔ)償函數(shù)。依照步驟1的估計(jì)結(jié)果獲取搜索變量,當(dāng)越接近真值,運(yùn)動(dòng)目標(biāo)成像聚焦越好,圖像質(zhì)量越高。
為驗(yàn)證本文所提地面動(dòng)目標(biāo)軌跡重構(gòu)算法的正確性和有效性,我們將上述算法應(yīng)用于國防科技大學(xué)自主研制機(jī)載3通道Ku波段WasSAR-GMTI系統(tǒng)獲取的實(shí)測數(shù)據(jù)處理,雷達(dá)系統(tǒng)參數(shù)與表1中給出的系統(tǒng)仿真參數(shù)相同。該數(shù)據(jù)錄取于某轉(zhuǎn)盤路口,場景中包含3輛合作皮卡車(如圖20所示)。圖21為合作車輛的多子孔徑處理結(jié)果,其中圖21(a)、圖21(d)、圖21(g)分別為合作車輛A,B,C的RD域跟蹤軌跡,圖21(b)、圖21(e)、圖21(h)分別為對(duì)應(yīng)的速度估計(jì)結(jié)果,圖21(c)、圖21(f)、圖21(i)分別為對(duì)應(yīng)的軌跡重構(gòu)結(jié)果,其中紅色曲線為車載GPS記錄下的車輛真實(shí)行駛軌跡,藍(lán)色曲線為CSI算法的估計(jì)結(jié)果,綠色曲線為所提TSPE算法的估計(jì)結(jié)果。在該段長子孔徑結(jié)果中,利用CSI算法獲取的合作車輛A,B,C速度估計(jì)誤差分別為0.1948 m/s,0.2301 m/s和0.4879 m/s,位置估計(jì)誤差分別為11.2766 m,22.2904 m和40.0275 m;相同條件下TSPE算法得到的合作車輛A,B,C徑向速度估計(jì)誤差分別為0.0884 m/s,0.1212 m/s和0.1325 m/s,位置估計(jì)誤差分別為5.7910 m,10.1390 m和13.4575 m。由此表明,TSPE算法具有更好的參數(shù)估計(jì)性能,從而獲取更高精度的車輛行駛軌跡重構(gòu)結(jié)果。

圖20 實(shí)驗(yàn)合作車輛Fig.20 The cooperative vehicles for the experiment
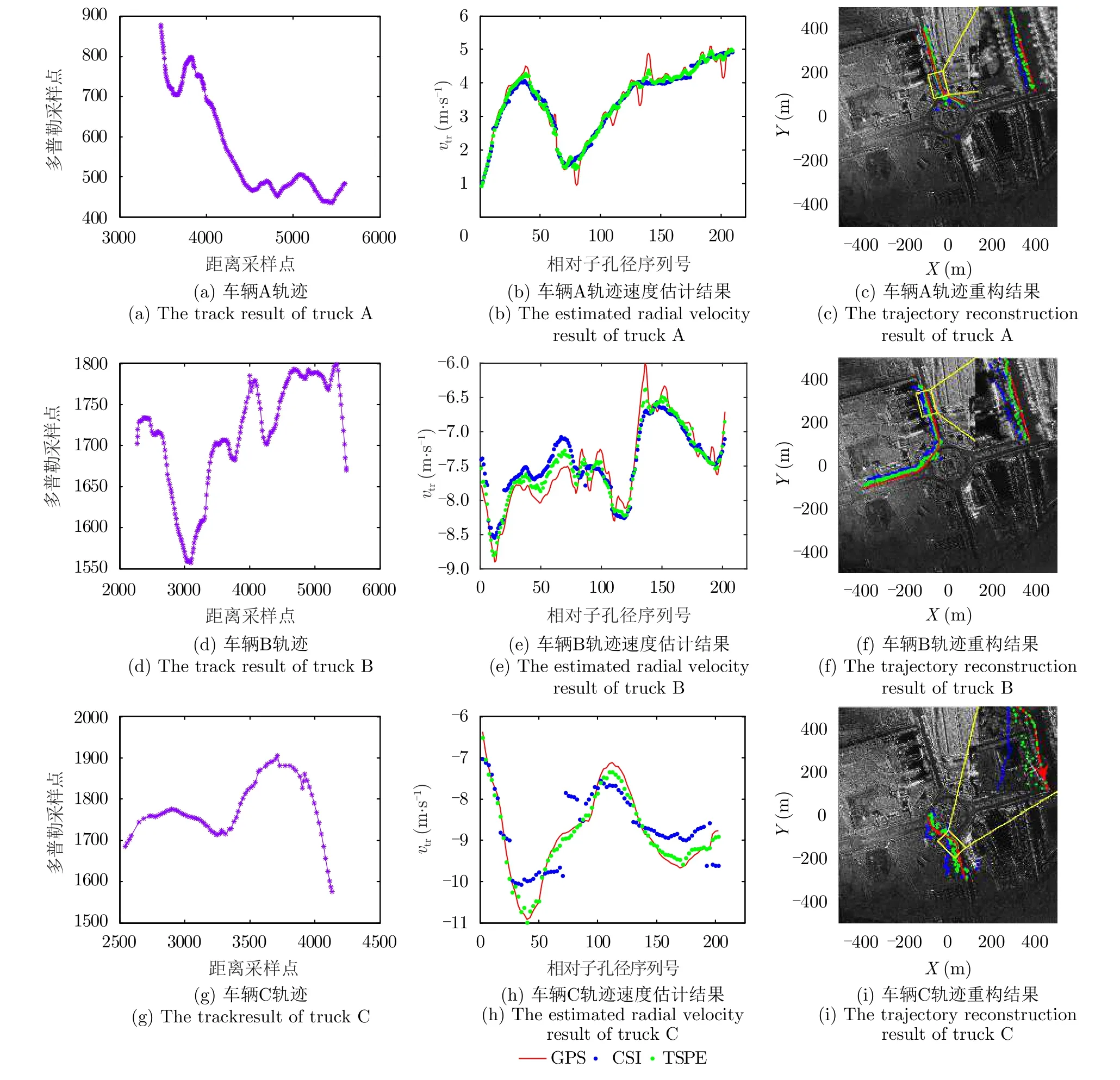
圖21 合作車輛目標(biāo)的多子孔徑軌跡重構(gòu)結(jié)果Fig.21 The multi channel trajectory reconstruction of cooperative targets
5.2 起伏路面下的動(dòng)目標(biāo)行駛軌跡重構(gòu)
5.1 節(jié)介紹了利用機(jī)載多通道WasSAR實(shí)現(xiàn)平坦路面上車輛目標(biāo)行駛軌跡重構(gòu)方法。然而,高架橋、環(huán)山公路和山地、丘陵等環(huán)境下的道路都是非平坦的,因此實(shí)施起伏路面下的運(yùn)動(dòng)目標(biāo)參數(shù)估計(jì)具有重要實(shí)際意義。然而,當(dāng)路面高度維信息不可忽略時(shí),傳統(tǒng)參數(shù)估計(jì)方法因只考慮了二維參數(shù)特性,將導(dǎo)致動(dòng)目標(biāo)行駛軌跡重構(gòu)結(jié)果失準(zhǔn)。
下面通過仿真實(shí)驗(yàn)分析起伏路面對(duì)目標(biāo)位置估計(jì)的影響。設(shè)置一個(gè)初位置(100 m,100 m,0 m)T、初速度(?10 m/s,4 m/s,3 m/s)T的運(yùn)動(dòng)目標(biāo),分別仿真不同高度與坡度的路面情況,得到如圖22所示的定位誤差結(jié)果。其中藍(lán)色曲線為運(yùn)動(dòng)目標(biāo)的誤差曲線,4條橫線分別為我國道路標(biāo)準(zhǔn)下雙向兩、四、六、八車道的一半路面寬度。從圖22中可知,若仍利用5.1節(jié)所提方法進(jìn)行參數(shù)估計(jì),高度位置越大或坡度越陡峭,定位誤差越大,因此對(duì)起伏路面運(yùn)動(dòng)目標(biāo)的三維參數(shù)估計(jì)方法進(jìn)行修正是非常必要的。
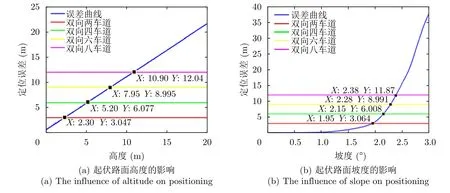
圖22 高度與坡度對(duì)目標(biāo)定位的影響Fig.22 The influence of altitude and slope on positioning
本節(jié)提出了一種針對(duì)起伏路面的運(yùn)動(dòng)目標(biāo)行駛軌跡重構(gòu)算法,以進(jìn)一步拓展WasSAR-GMTI應(yīng)用范圍,具體處理流程如圖23所示。在實(shí)際操作中,首先將原始完整數(shù)據(jù)進(jìn)行子孔徑劃分,并對(duì)每個(gè)子孔徑數(shù)據(jù)采用第3節(jié)提出的誤差校正方法進(jìn)行多通道WasSAR-GMTI預(yù)處理;然后,采用第4節(jié)所提方法進(jìn)行動(dòng)目標(biāo)檢測與跟蹤,從而獲取運(yùn)動(dòng)目標(biāo)的RD域候選集;最后,采用本節(jié)所提算法,分步驟估計(jì)運(yùn)動(dòng)目標(biāo)的三維速度與三維位置。

圖23 起伏路面下的運(yùn)動(dòng)目標(biāo)軌跡重構(gòu)處理流程圖Fig.23 The processing flow of 3-D moving target trajectory reconstruction
本節(jié)所提方法主要分為兩級(jí),第1級(jí)采用低精度估計(jì)方法。首先,利用等效變換方式將正側(cè)視機(jī)載WasSAR轉(zhuǎn)化為等效觀測的斜視幾何,如圖24所示。在等效觀測幾何中,新的載機(jī)初速度V=由載機(jī)速度va與運(yùn)動(dòng)目標(biāo)速度(vx,vy,vz)T合成。該等效變換是基于數(shù)學(xué)工具推導(dǎo)得出的,真實(shí)觀測幾何與等效觀測幾何下的距離方程是相同的。分析圖24,可得到兩個(gè)結(jié)論:

圖24 起伏路面下運(yùn)動(dòng)目標(biāo)的原始觀測幾何與等效觀測幾何Fig.24 The real geometry and equivalence of 3-D moving target
(1) 真實(shí)觀測幾何中的運(yùn)動(dòng)目標(biāo)P與等效觀測幾何中的靜止目標(biāo)P′是等效的,即真實(shí)運(yùn)動(dòng)目標(biāo)的位置經(jīng)過坐標(biāo)變換得到等效靜止目標(biāo)的位置;
(2) 等效觀測幾何中雷達(dá)平臺(tái)的速度受真實(shí)觀測幾何中雷達(dá)速度與運(yùn)動(dòng)目標(biāo)運(yùn)動(dòng)參數(shù)影響,二維速度大小分別變?yōu)閂x與Vy,且等效高度也發(fā)生變化。
定義向心加速度a=/ra,則通道1運(yùn)動(dòng)目標(biāo)的等效斜距方程表示為
是運(yùn)動(dòng)目標(biāo)P的地平面等效位置P′,而
其中,γ=V/va表示相對(duì)速度,d1m為通道間的等效基線,β1,β2與β3表示不同的速度投影,具體表示為
這表明在原始觀測幾何中存在與起伏路面運(yùn)動(dòng)目標(biāo)等效的地平面靜止目標(biāo)。接著,經(jīng)過BP成像,利用慢速運(yùn)動(dòng)目標(biāo)近似,提取等效靜止目標(biāo)的干涉相位為
其中,ψ表示雷達(dá)相對(duì)于目標(biāo)的瞬時(shí)斜視角,θel表示下視角。利用不同子孔徑下的目標(biāo)斜視角ψk與下視角θel,k差異,可實(shí)現(xiàn)運(yùn)動(dòng)目標(biāo)的三維速度估計(jì)。
其中,vtr,k表示估計(jì)出的動(dòng)目標(biāo)徑向速度。
運(yùn)動(dòng)目標(biāo)回波信號(hào)的三階多項(xiàng)式相位信號(hào)可表示為
與多普勒參數(shù)存在如下對(duì)應(yīng)關(guān)系
即多項(xiàng)式相位的一階、二階與三階系數(shù)可分別轉(zhuǎn)化為多普勒中心頻率、多普勒調(diào)頻率與二次變化率。因此,在獲取三維速度后,可利用三次相位函數(shù)(Cubic Phase Function,CPF)估計(jì)值與獲取起伏路面運(yùn)動(dòng)目標(biāo)的多普勒參數(shù),最終求得運(yùn)動(dòng)目標(biāo)的三維位置,進(jìn)而實(shí)現(xiàn)運(yùn)動(dòng)目標(biāo)的三維軌跡重構(gòu)。由于速度估計(jì)步驟存在近似誤差,這將在位置估計(jì)中產(chǎn)生傳遞誤差效應(yīng),進(jìn)而影響位置估計(jì)的精度。針對(duì)這個(gè)問題,可采用5.1節(jié)提出的對(duì)比度最優(yōu)法提高參數(shù)估計(jì)精度,并利用三階相位系數(shù)衡量位置估計(jì)的準(zhǔn)確性,即
同樣,我們利用國防科技大學(xué)自主研制的機(jī)載Ku波段三通道WasSAR-GMTI系統(tǒng)(系統(tǒng)參數(shù)同表1)開展了起伏路面下動(dòng)目標(biāo)行駛軌跡重構(gòu)試驗(yàn),并利用試驗(yàn)中獲取的實(shí)測數(shù)據(jù)驗(yàn)證本節(jié)所提起伏路面運(yùn)動(dòng)目標(biāo)軌跡重構(gòu)方法的正確性和有效性。觀測場景如圖25所示,在場景中心有一座可供車輛行駛的陸地拱橋(如圖26(a)所示),拱橋下面是一條可供車輛通行的公路,橋面最高點(diǎn)距地面約10 m。試驗(yàn)中,合作車輛在拱橋上行駛,如圖26(b)所示。利用第4節(jié)提出的WasSAR動(dòng)目標(biāo)檢測與跟蹤算法,獲取合作車輛的RD域點(diǎn)跡,再利用本節(jié)所提算法獲取合作車輛的速度估計(jì)與行駛軌跡重構(gòu)結(jié)果。如圖27所示,合作車輛的三維速度平均估計(jì)誤差為0.2807 m/s,0.2868 m/s,0.2760 m/s,三維位置平均估計(jì)誤差為20.8831 m,18.6755 m,4.6702 m。可發(fā)現(xiàn),利用多子孔徑相位聯(lián)合能夠獲取較高精度的起伏路面運(yùn)動(dòng)目標(biāo)三維速度估計(jì)結(jié)果,而基于CPF的相位系數(shù)則能夠較為準(zhǔn)確的獲取動(dòng)目標(biāo)的空間三維位置信息。試驗(yàn)結(jié)果證明機(jī)載WasSAR可準(zhǔn)確獲取重構(gòu)出起伏路面下的動(dòng)目標(biāo)行駛軌跡。

圖25 觀測場景圖像Fig.25 The images of observation scene

圖26 觀測場景中的拱橋與合作車輛Fig.26 The pictures of arch bridge and cooperative pickup truck of observation scene
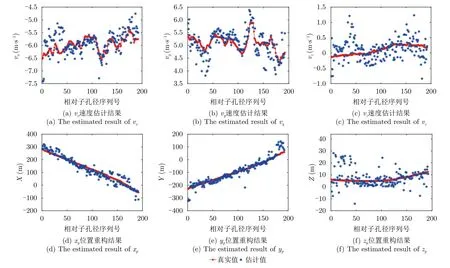
圖27 起伏路面動(dòng)目標(biāo)三維速度估計(jì)結(jié)果與三維位置重構(gòu)結(jié)果Fig.27 The three-dimensional velocity estimation and trajectory reconstruction of moving target in the three-dimensional field
6 結(jié)語
與機(jī)載LSAR-GMTI相比,機(jī)載WasSAR-GMTI可對(duì)重點(diǎn)區(qū)域內(nèi)出現(xiàn)的運(yùn)動(dòng)目標(biāo)實(shí)施多角度長時(shí)間凝視跟蹤監(jiān)視,生成動(dòng)態(tài)感知信息,因此具有重要應(yīng)用價(jià)值。本文介紹了機(jī)載多通道WasSAR-GMTI技術(shù)實(shí)現(xiàn)方法和流程,重點(diǎn)闡述了機(jī)載多通道WasSARGMTI誤差校正、多通道WasSAR動(dòng)目標(biāo)檢測跟蹤和多通道WasSAR動(dòng)目標(biāo)行駛軌跡重構(gòu)等關(guān)鍵技術(shù),并針對(duì)平臺(tái)姿態(tài)誤差校正、多目標(biāo)軌跡跟蹤、起伏路面下的動(dòng)目標(biāo)行駛軌跡重構(gòu)等特殊問題,提出了相應(yīng)的解決方法。此外,本文給出了作者團(tuán)隊(duì)利用自主研制機(jī)載多通道WasSAR-GMTI系統(tǒng)開展的外場飛行試驗(yàn)和實(shí)測數(shù)據(jù)處理結(jié)果,驗(yàn)證了機(jī)載多通道WasSAR地面運(yùn)動(dòng)目標(biāo)持續(xù)跟蹤監(jiān)視的有效性和實(shí)用性。目前,機(jī)載WasSAR-GMTI技術(shù)還不成熟,尚有很多理論問題和工程實(shí)踐問題有待研究與驗(yàn)證。未來工作中,我們將基于團(tuán)隊(duì)已取得的研究成果,開展面向?qū)嶋H需求的深入研究與驗(yàn)證,推動(dòng)機(jī)載WasSARGMTI技術(shù)在軍事領(lǐng)域和民用領(lǐng)域內(nèi)的應(yīng)用。
利益沖突所有作者均聲明不存在利益沖突
Conflict of Interests The authors declare that there is no conflict of interests
猜你喜歡
中國設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48