基于雷視融合的隧道數字化管控應用
2024-01-01 00:00:00覃士蘅
西部交通科技 2024年6期
摘要:文章提出基于雷視融合的隧道數字化管控方案,通過充分發揮毫米波雷達和視頻攝像頭兩種主要感知終端的各自優勢,結合高效的雷視融合算法,實現隧道內車輛行為識別、交通事件檢測、異常信息感知能力的提升。同時,通過智慧高速云控平臺對多源交通傳感器數據充分整合,實現公路隧道實景化智能管控。該方案在提高公路隧道運營安全性、提高運營效率、優化管理模式方面具有重要意義。
關鍵詞:雷視融合;數字化管控;隧道管理;云控平臺
中圖分類號:U491.1+16
0 引言
廣西高速公路里程逐年攀升,截至2023年12月已突破9 000 km,高速公路應急救援與保暢工作的壓力不斷增大,高速公路上交通事故的高發態勢和應急救援的低效率之間的矛盾日益突出[1]。高速公路隧道在運營管理中易成為管控盲區,導致特情發現慢、事件處置時間長,并容易引發二次事故,導致路網擁堵。隨著交通強國戰略的不斷深化,數字化技術在隧道管控中的應用也越來越廣泛。雷視融合是一種新型的數字化技術,在隧道數字化管控中有著重要的應用價值。本文將從隧道數字化管控的現狀和存在的問題入手,探討雷視融合在隧道數字化管控中的應用及其優勢,并與實際工程應用中的其他管控手段相結合,為高速公路隧道的數字化管控提供參考和建議。
1 雷視融合技術的概念及特點
雷視融合技術是指將雷達和視覺傳感器相結合[2],將雷達傳感器獲取的目標物體信息和攝像頭傳感器獲取的目標物體圖像信息進行融合,綜合二者的數據特點進行車輛精準跟蹤[3],從而獲取多維度、更精準的目標物體信息的一種技術。其優勢主要表現在以下幾個方面:
(1)提高目標物體檢測和識別的準確性。雷達能夠獲取目標物體的距離、速度等信息,但無法直接獲取目標物體的形狀、顏色等視覺信息,而攝像頭則能夠提供此類視覺信息。雷視融合技術將兩種傳感器獲取的信息進行融合,可以大大提高目標物體檢測和識別的準確性[4]。
(2)提高目標物體跟蹤的穩定性。由于目標物體在運動過程中可能會出現遮擋、姿態變化等情況,單一傳感器往往難以保證跟蹤目標物體的穩定性。而雷視融合技術將兩種傳感器獲取的信息進行融合,可以有效避免目標丟失、分裂等問題,提高目標物體跟蹤的穩定性。
(3)提高系統在復雜環境中的適應性。雷視融合技術不僅能夠在多種天氣和光線條件下正常工作,還能夠適應不同類型的目標物體和場景,提高系統的適應性。
2 隧道數字化管控的現狀及問題
隧道作為一種特殊的道路形式,具有高度的封閉性和風險性,隧道管控是交通安全管理中至關重要的一環。但傳統的隧道管控方式缺乏科學化、智能化的手段,在實際操作中,往往存在以下問題:
(1)缺乏準確、有效的交通態勢感知方法。隧道內部的車輛密集、行車速度快,一旦發生交通事故,極易引發二次事故,造成重大的經濟損失和社會影響[5]。目前主要依靠視頻事件檢測、車檢器等設備進行感知,無法準確掌握隧道內部交通態勢,也難以在智慧隧道決策、管控以及仿真推演等方面進行聯動[6]。
(2)缺乏有效的隧道應急預案。在面對隧道內出現的突發情況時,沒有形成固定、有效的應急預案,如應急團隊成員及職責、疏散計劃、通信計劃、火災控制措施、救援計劃等,同時也缺少定期的應急演練,在緊急情況下難以達到良好的處置效果。
(3)缺乏與隧道外部的設備設施進行聯動疏導。隧道內設備數量及設備種類較多,在實際運營管理中往往會將隧道管理作為一個獨立的模塊,未能與外場的可變情報板、語音喊話系統、公眾服務信息觸達等模塊進行聯動。
3 雷視融合在隧道數字化管控中的作用及優勢
在隧道的數字化管控需求中,雷視融合主要應用于以下幾個方面:
(1)提高隧道交通態勢感知的效率。雷達技術可以探測隧道內的車輛、行人等物體的位置和移動軌跡,視頻監控技術可以提供圖像和視頻資料以便對事件進行更加直觀地分析和判斷。雷視融合技術可結合兩者的技術特點,能夠在復雜環境中及時對異常行車軌跡進行研判,發現交通事故、拋灑物、火災等情況,進而采取相應的措施。
(2)提高隧道管控的效率。傳統的隧道管控方式主要依賴人工巡視和手動操作,效率低下且容易出現工作疏漏。而雷視融合技術可以實現對隧道內部的全方位監控和數據采集,聯動隧道管控的應急預案,實現不同等級事件的自動化分發處置,提高交通運行及管控的效率。
(3)降低隧道管控的成本。通過引入雷視融合技術,可以減少人力巡視和手動操作的需求,減少事故損失和隱患,降低隧道運營的風險成本。
4 方案設計
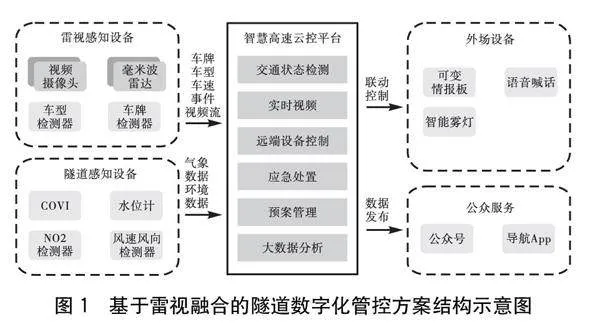
基于雷視融合的隧道數字化管控方案,其總體結構如圖1所示。
4.1 方案總體架構設計
方案主要分為五大部分,分別是前端的雷視感知設備、隧道感知設備、智慧高速云控平臺、外場設備、公眾服務。
雷視感知設備主要包括視頻攝像頭、毫米波雷達、車型檢測器、車牌檢測器等,負責提供過往車輛的車牌、車型、車速、方向角等基礎數據,并提供原始視頻流及雷視融合分析的事件告警推送數據。
隧道感知設備主要包括COVI、水位計、二氧化氮檢測器、風速風向檢測器等隧道內的各類檢測設備,提供隧道內的環境數據。
智慧高速云控平臺主要包括交通狀態監測、實時視頻觀看、遠端設備控制、應急處置、預案管理、大數據分析等模塊,通過接收雷視感知設備與隧道感知設備的數據,并進行聯合分析、預案匹配,為管理者提供事件的全景展示及快速處置能力。
外場設備主要包括可變情報板、定向語音喊話系統、智能霧燈等路側設備,作為快速觸達事件周圍及事件上游司乘人員的路側設備渠道。
公眾服務主要包括微信公眾號、主流的導航APP等,作為觸達出行司乘人員的互聯網渠道。
五大部分通過數據流方式進行聯通,實現事件的精準感知、告警提示、應急處置、信息聯動的全生命周期管理。
4.2 數字化管控核心模塊設計
雷視感知數據融合模塊:雷達與視頻數據的融合采用后融合的技術方案,針對毫米波雷達和視頻分別進行目標檢測,生成獨立的目標檢測結果后再對結果進行融合。基于雷達結合視頻數據對目標車輛進行識別,并進行全程跟蹤,輸出軌跡信息。
道路異常分析及上報模塊:對目標的速度、方向角、距離及動態軌跡進行研判,識別出停車、變道、超速等異常告警,并將異常告警推送至云端。
異常告警處置模塊:根據異常告警的樁號、經緯度及路段信息,自動匹配離告警點最近的攝像頭,為用戶展示異常告警信息及該點位的實時視頻。用戶確認告警真實性后,自動匹配、觸發預案庫中該類型告警的應急預案。
預案管理模塊:預案以路段、樁號、經緯度、告警類型、告警等級為預案觸發條件,以通知相應的運營管理人員,啟動各角色處置流程,關聯相應的外場設備,自動匹配對應設備的預置操作配置為預案執行步驟。
外場設備聯動控制模塊:根據預案中配置的設備預置操作配置,自動對外場設備的啟停、顯示內容、工作邏輯進行控制。
公眾信息發布模塊:根據告警類型、告警等級與預案配置內容,將道路事件實時同步至微信公眾號、導航APP,為后續司乘出行提供參考。
4.3 試點工程實施及應用
經過對隧道內車流量、原有攝像頭密度、隧道上下游外場設備數量等相關部署條件的比選,選取S74信梧高速的爽沖隧道作為基于雷視融合的隧道數字化管控方案的試點隧道。工程中主要進行了以下改造:
(1)加裝雷達設備。雷視感知數據由爽沖隧道內的視頻攝像頭、毫米波雷達、隧道洞口的車型檢測器、車牌檢測器提供。隧道內部原有的視頻攝像頭密度約為120 m/臺,對隧道內的車流進行全程監控。雷達采用350 m的定向毫米波雷達,雷達間的布設間距約200 m,預留150 m用于雷達接力。爽沖隧道全長約1.2 km,左右洞共計加裝毫米波雷達11套。
(2)加裝車牌及車型檢測器。隧道洞口頂部加裝車牌檢測器,隧道入口側部加裝車型檢測器。車輛進入隧道后,車型、車牌檢測器捕捉到車牌、車型信息,并與雷達目標進行綁定。
(3)加裝雷視融合服務器。增加一臺雷視融合服務器,將爽沖隧道內的11路雷達數據及10路視頻信號作為輸入,并部署雷視融合數據分析算法模型,對雷達及視頻數據進行融合分析,輸出道路異常告警及目標軌跡數據信息。
(4)雷視感知數據接入云控平臺。云控平臺內增加雷視異常告警類型,增加隧道應急預案配置。
5 應用效果分析及展望
本方案在S74信梧高速爽沖隧道內進行試點應用,根據實地運行測試,具體效果如下。
(1)硬件系統性能:毫米波雷達加裝在隧道洞壁內,與視頻攝像頭、雷視融合服務器組成雷視融合感知系統。雷視融合系統最大探測距離<350 m,目標測速范圍±250 km/h,測速精度0.1 m/s,目標方向角分辨率≤0.7°,方向角精度0.1°,支持根據雷達高精定位輸出目標經緯度。
(2)業務系統性能:雷視融合系統可輸出停車、超速、變道、行人等異常告警信息,告警信息輸出延時≤150 ms,目標定位誤差≤0.3 m。告警信息與應急預案自動匹配,支持一鍵關聯控制相關外場設備、發布預警信息。應急預案匹配時間≤500 ms,預警信息發布時長≤1 s。
在實地運行中,本方案可實現隧道內目標的精準感知、異常事件的實時捕獲,聯動隧道應急預案進行交通流管控,提高隧道運營管理效率。未來,雷視融合系統仍需要在更多實地運行場景中不斷訓練,提升復雜環境中的感知準確率,并延伸出更多場景的應用。
6 結語
針對隧道管控中交通事件難監測、交通流不透明、應急預案不完善、設備聯動難控制等問題,本文提出基于雷視融合的隧道數字化管控方案,并且結合實際工程對方案進行部署應用。通過聯動前端的雷視感知設備與隧道感知設備,在智慧高速云控平臺中進行交通態勢分析與研判,并通過預置的應急預案完成外場設備的半自動聯動控制、自動化推送道路事件信息至公眾服務平臺,形成感知、分析、處置、控制的隧道數字化管理閉環,形成便捷的事件感知與態勢監測、協同合作和高效的事件處置流程,為高速公路隧道中環境和車輛的實時監測、自動化分析和管理提供了強有力的支撐。
參考文獻
[1]韋 愷.智慧高速App在高速公路應急救援中的應用[J].西部交通科技,2022(10):187-189.
[2]陳 筱,朱向冰.人工智能技術在自動駕駛中的應用[J].汽車電器,2020(10):4-5,10.
[3]陳 強.基于雷視融合的車輛跟蹤系統設計研究[J].西部交通科技,2023(10):206-207,217.
[4]陳 帥,尹 洋,楊全順.基于深度學習的無人機入侵檢測方法[J].計算機系統應用,2021,30(4):32-38.
[5]高 飛.隧道智慧化管控系統關鍵技術探究[J].中國交通信息化,2023(10):95-97.
[6]陳冠宇.智慧隧道綜合管控系統分析[J].運輸經理世界,2023(14):71-73.
收稿日期:2024-03-16
基金項目:廣西重點研發計劃項目“多源數據隧道交通智能監測網絡建設關鍵技術研究”(編號:桂科AB23026120);南寧市創新創業領軍人才“邕江計劃”項目“隧道交通智能全域實時感知關鍵技術研發與應用”(編號:2023008);廣西重點研發計劃項目“基于人工智能的高速公路跨境服務成套技術研發及應用”(編號:桂科AB22080039)
作者簡介:覃士蘅(1991—),碩士,工程師,主要從事智能交通系統研發與架構設計工作。