基于GMD1002芯片的電壓采集系統設計與優化
2024-01-01 00:00:00張澤姚育成鮑迪李珉澄鄧曉月
湖北工業大學學報 2024年4期



[摘 要] 針對自研的車規級電池管理芯片GMD1002,設計了以STM32為主控芯片的電池電壓采集系統以及數字濾波器。并采用精密電源和模擬電芯對系統的固定電壓采集、斜坡電壓采集及電壓均衡性管理等性能進行了相關測試。結果表明:數字濾波器能有效降低瞬態脈沖的影響,固定電壓讀取誤差在1 mV之內;在0~3.2768 V范圍內,斜坡電壓讀取誤差在2 mV以內。芯片內部的電池均衡控制性能正常,具有良好的電池管理功能。
[關鍵詞] 電池管理芯片; 數字濾波器; 電池均衡控制; 電壓采集
[中圖分類號] TN711, TP311" [文獻標識碼] A
隨著當前全球環境污染日漸嚴重和能源危機等問題的加劇,以電池驅動的新能源汽車開始逐漸替代以汽油驅動的傳統汽車。因此新能源汽車的電池和電池相關配套設施的研發成為當前的熱點。目前,車規級電池管理芯片[1]屬于新能源汽車的核心部件之一,工作過程中時刻采集汽車電池的電壓,并通過控制電路為汽車充電時提供均衡優化。這些性能提高了電池的工作效率,增加了電池的使用壽命,同時也為汽車的安全運行提供了重要保障[2]。
石建文等(2020)[3]使用電池管理芯片LTC6804-1和主控芯片MC9S12XET256設計電池管理系統來采集電池電壓,其采集電壓誤差的大小在5~10 mV。上述系統僅通過手動測量電池電壓來定義標準電壓。該方法難以避免操作上出現問題,并且容易受到瞬態電壓的影響。查曉銳等(2020)[4]使用電池管理芯片LTC6811和主控芯片MC9S12XEPl00MAL設計電池電壓采集系統。系統通過電池剩余電量估算法定義電池的標準電壓,其采集電壓的誤差在2 mV以內,在一定程度上降低了采集電壓的誤差。但系統算法的計算時間較長且高度依賴電池模型。因此精準定義標準電壓,降低瞬態脈沖對電壓采集系統的影響,簡化電壓采集流程對電壓采集系統的檢測和優化有著重要意義。
本文基于自研的電池管理芯片GMD1002 設計了電壓采集系統,利用電壓輸入更精準和穩定的模擬電芯替代電池對系統進行實驗測試,測試精度有明顯的提高。
1 電壓采集系統設計
1.1 GMD1002芯片引腳功能
GMD1002芯片(格威半導體自研芯片)是一款用于新能源汽車的車規級多節電池電池組監控芯片,可同時測量16節串電池電壓。芯片支持SPI通信以及菊花鏈通信方式,最大支持2 M的速率。圖1為該芯片的引腳頂視圖。
引腳CINlt;0gt;-CINlt;16gt;是16節電池正負極的采集輸入口,芯片通過監測每個CIN引腳的電位和兩個相鄰CIN引腳間的電位差來監測電池的電壓。SDI、SDO、CSN、SCK引腳可用于與STM32芯片建立SPI通信。引腳DISlt;0gt;-DISlt;16gt;是芯片的16個電池均衡口[5],引腳之間有MOS開關,在電池充電時可用于調節電池電壓。在充電狀態下芯片內部的均衡開關會在相鄰電池采集的電壓相差過大時開啟。均衡開關開啟時高電壓電池內部的電子會逐漸流向低電壓電池。圖2是芯片GMD1002內部的電壓均衡電路。
其電壓計算公式為:
VCell[i]=VCIN[i]-VCIN[i-1](1)
VDischarge[i]=VDIS[i]-VDIS[i-1](2)
式(1)中:VCIN[i]是芯片引腳CINlt;igt;的電壓值,VCell[i]第i節電池的電壓大小,式(2)中,VDIS[i]是芯片引腳DISlt;igt;的電壓值,VDischarge[i]指相鄰DIS引腳之間的電壓差(i=1-16)。
1.2 MCU設計
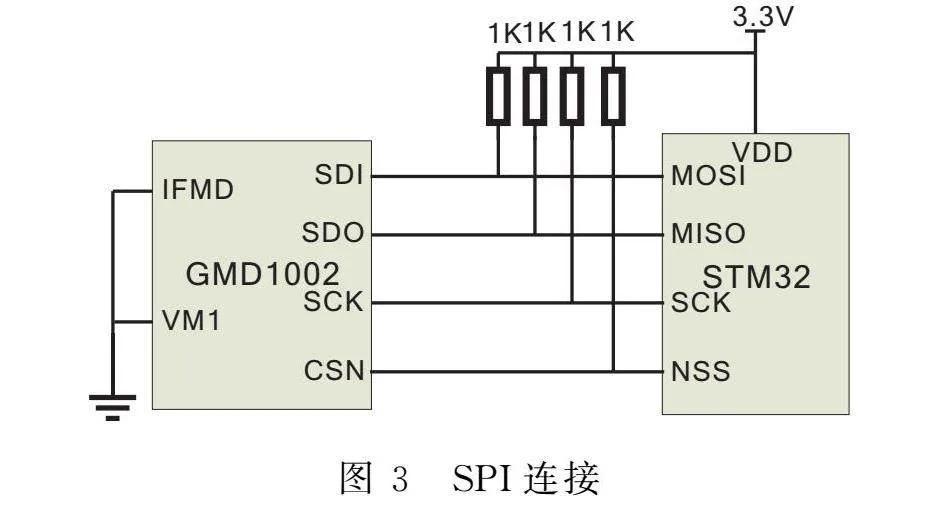
MCU用于接收并執行上位機所發送的指令,采集并傳輸被測芯片的數據發送給上位機。本文采用意法半導體公司的STM32系列芯片STM32F429IGBT6[6],其與GMD1002的SPI連接如圖3所示[7]。GMD1002的SPI引腳SCK、CSN、SDO、SDI分別連接STM32芯片的SCK、NSS、MISO、MOSI。
STM32芯片自舉模式[8]選用的是主Flash模式,該模式是將數據先存儲至STM32芯片的寄存器內,當數據傳輸至上位機后STM32會自動抹除寄存器數據,可用于存儲新數據。MCU的外部高速時鐘源(HSE)和外部低速時鐘源(LSE)分別由頻率為25Mhz和32.765Mhz的晶振來提供。MCU的調試口采用SWD。圖4為STM32芯片的相關引腳配置。
1.3 CAN通信構建
CAN總線(Controller Area Network)常用于汽車計算機的通信系統[9-10]。考慮到GMD1002屬于車規級芯片,使用CAN總線作為MCU和PC上位機之間的通信總線可以更準確地模擬芯片真實的工作環境。
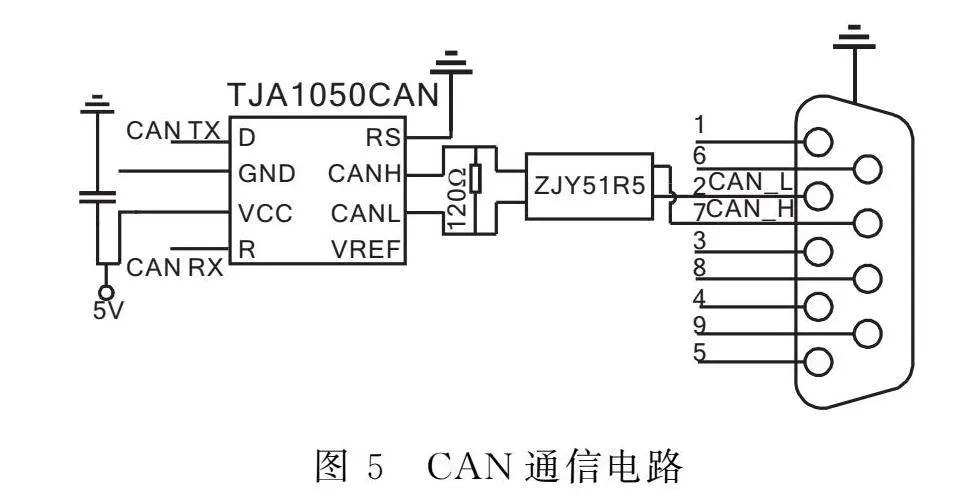
STM32芯片內部已有CAN總線控制器模塊,只需在對應的引腳外配置一個型號為TJA1050CAN的CAN總線收發器即可完成CAN總線通信,如圖5所示。
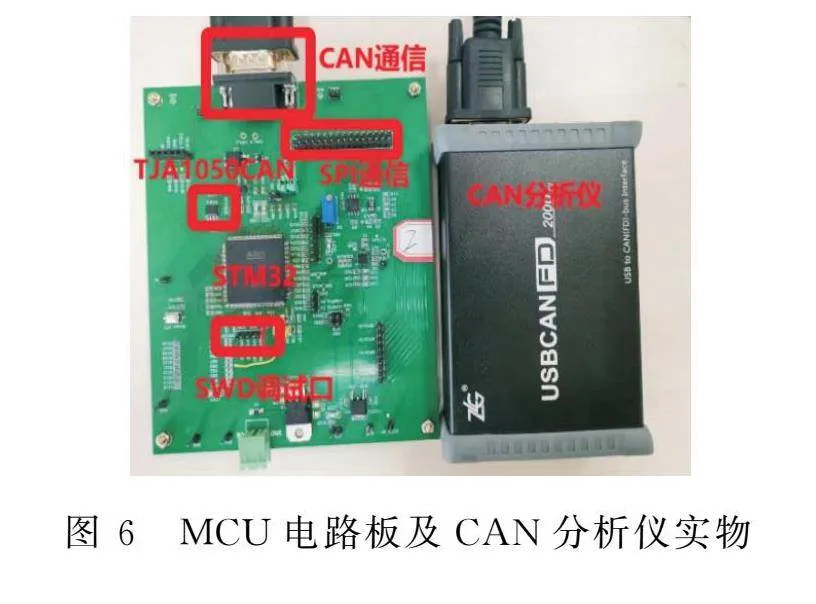
由于PC計算機內部沒有CAN總線接口,本系統采用USBCANFD-200U分析儀實現CAN總線報文的發送與解析[11]。為了濾除引腳CAN_H和CAN_L上信號之間的電磁干擾,采用共模電感(ZJY51R5)實現TJA1050CAN和USBCANFD-200U的連接。圖6為實驗中MCU和CAN分析儀的實物圖。
2 系統程序設計
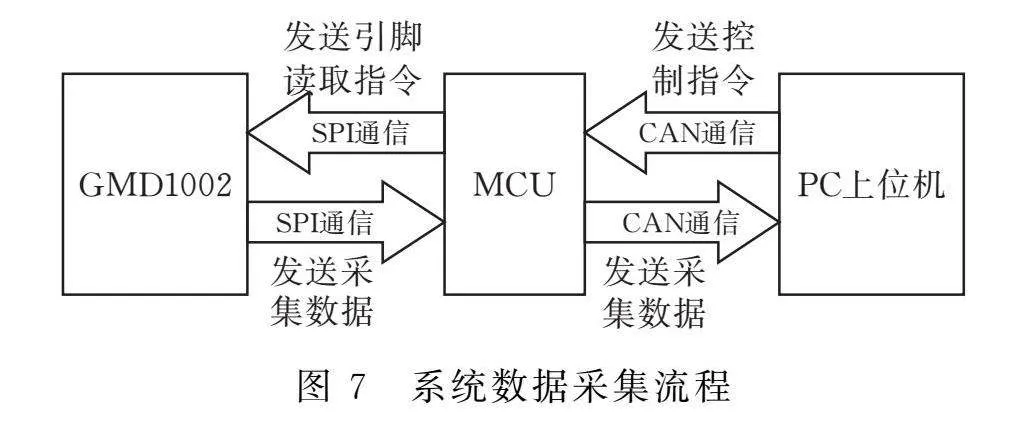
圖7是該系統數據采集與傳輸的流程圖。系統的軟件部分由PC上位機軟件和下位機(MCU)軟件組成。其中上位機控制面板和程序在Visual Studio 2017中的.NET平臺編寫[12]。下位機系統采用Keil uvision5軟件編寫,并通過SWD調試口燒錄至STM32芯片內。
通過上位機向MCU發送一個采集信號,MCU會通過SPI引腳向GMD1002芯片發送對應的數據讀取指令。GMD1002芯片的每個CIN、DIS和GPIO引腳均有對應的讀取指令碼,當MCU把指令碼輸入至GMD1002芯片內部時,GMD1002會通過SPI引腳將這些指令碼傳輸至MCU的寄存器,最后數據會傳輸回PC上位機。對比兩個電壓的差值大小來計算芯片的電壓采集誤差。
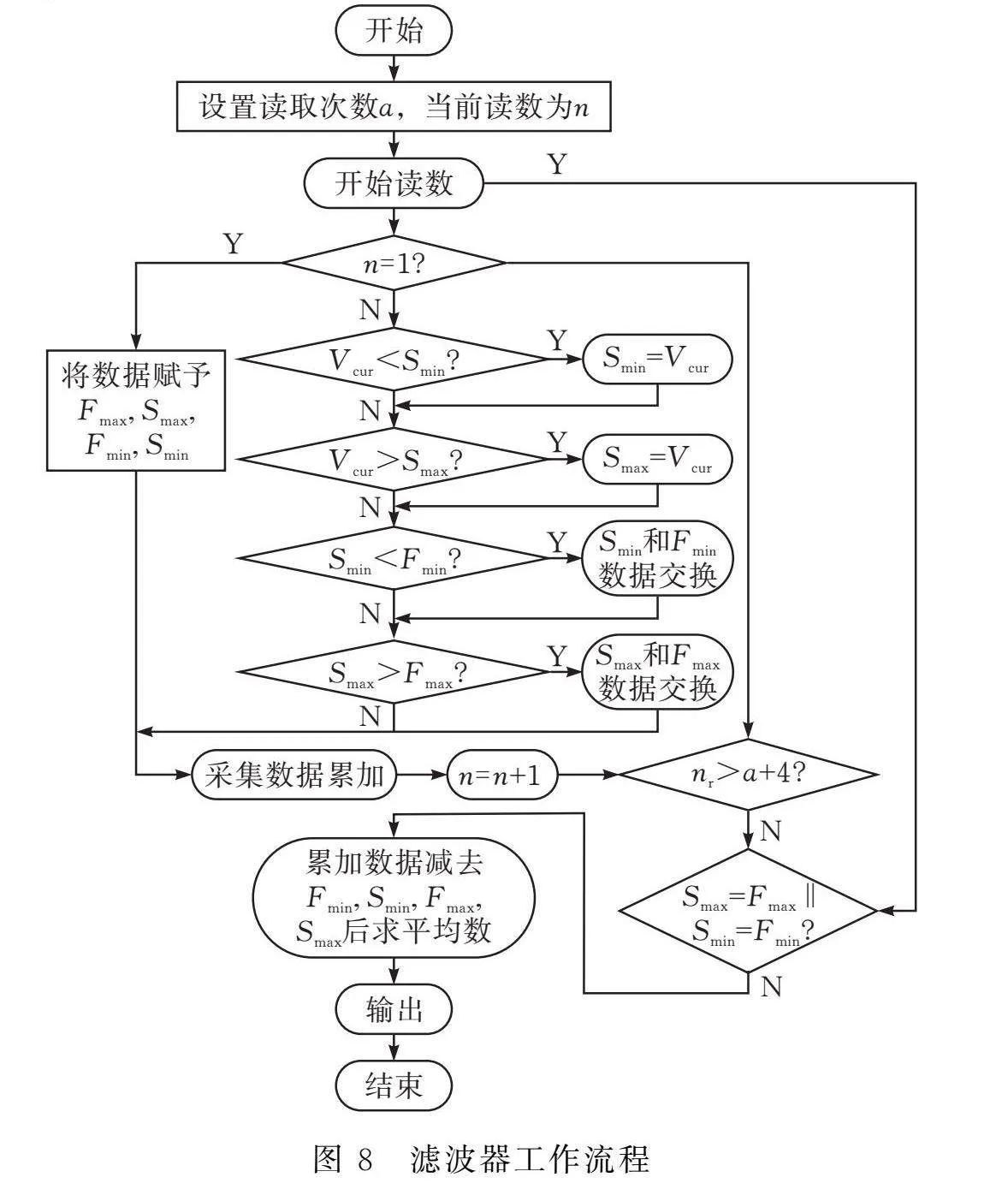
由于受瞬態脈沖、熱噪聲和芯片工藝缺陷等因素影響,所采集到的實際電壓與標準電壓差值的方差較大。為了降低這些因素的影響,設計了數字濾波器,其流程如圖8所示。
濾波后的采樣電壓值
Vout=Vtotal-Smax-Smin-Fmin-Fmaxa-4(3)
式中:Vtotal是采樣數據累加的總和,Smax、Smin、Fmax、Fmin分別是第二大的采樣數據,第二小的采樣數據,最大的采樣數據和最小的采樣數據。a是每一組數據的采集次數。
3 測試實驗
3.1 固定電壓測試
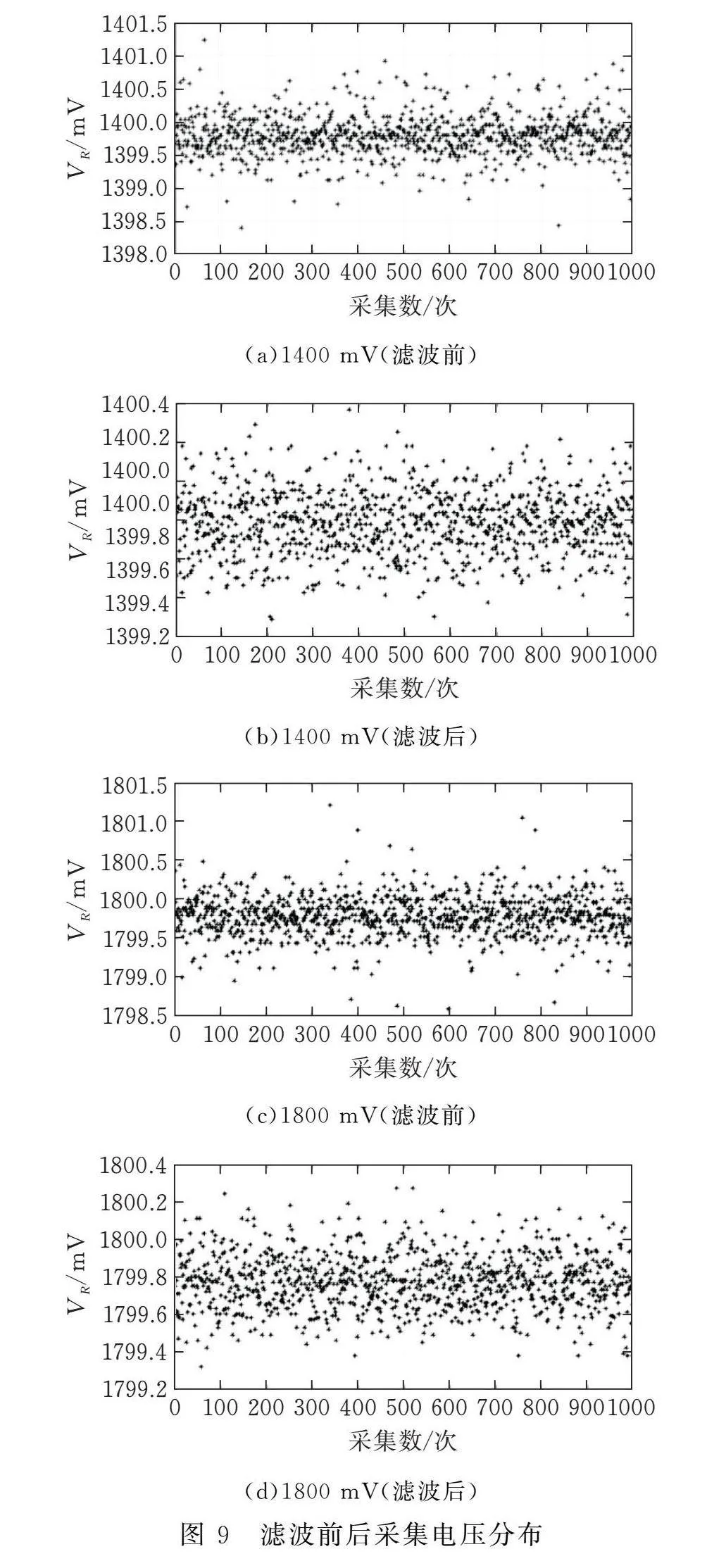
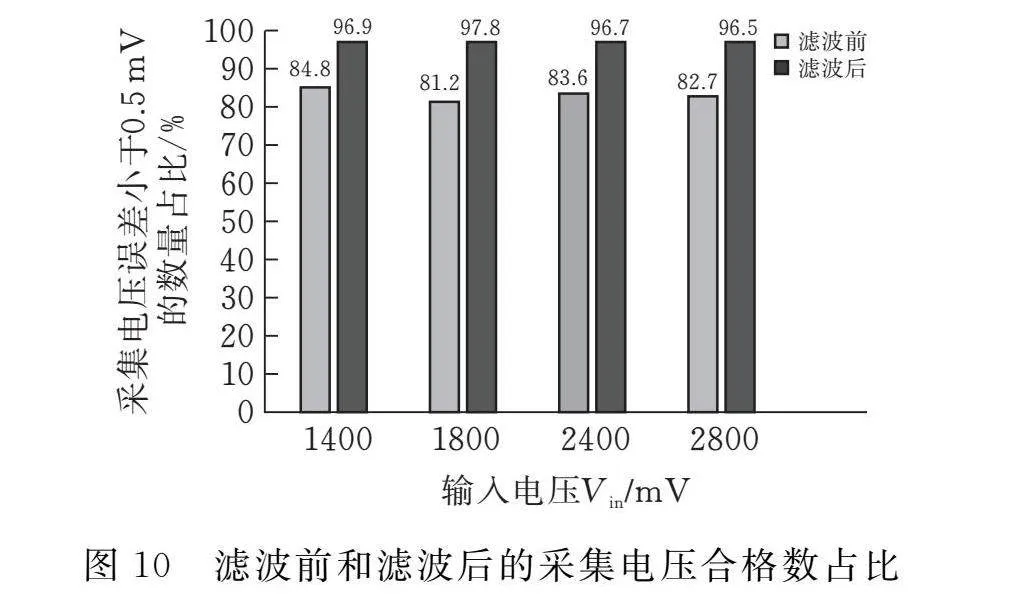
使用可編程式精密電源GS200分別產生1400 mV、1800 mV、2400 mV、2800 mV的標準電壓。將其施加給GMD1002的某個GPIO引腳,采集1000次GPIO引腳電壓值VR,其結果如圖9所示。
圖9中,圖9a和圖9c是直接采集的結果,圖9b和圖9d是以20個采集電壓為一組,經過數字濾波后的結果。以誤差在0.5 mV內為標準判定采集電壓為合格,圖10為濾波前后合格的采集電壓數占比。
通過圖10中數據可知,在不使用濾波器的情況下,采集電壓合格率在85%以下,在使用濾波器后,合格率均高于95%。表明使用數字濾波器可以提升采集電壓的準確性。
3.2 斜坡電壓測試
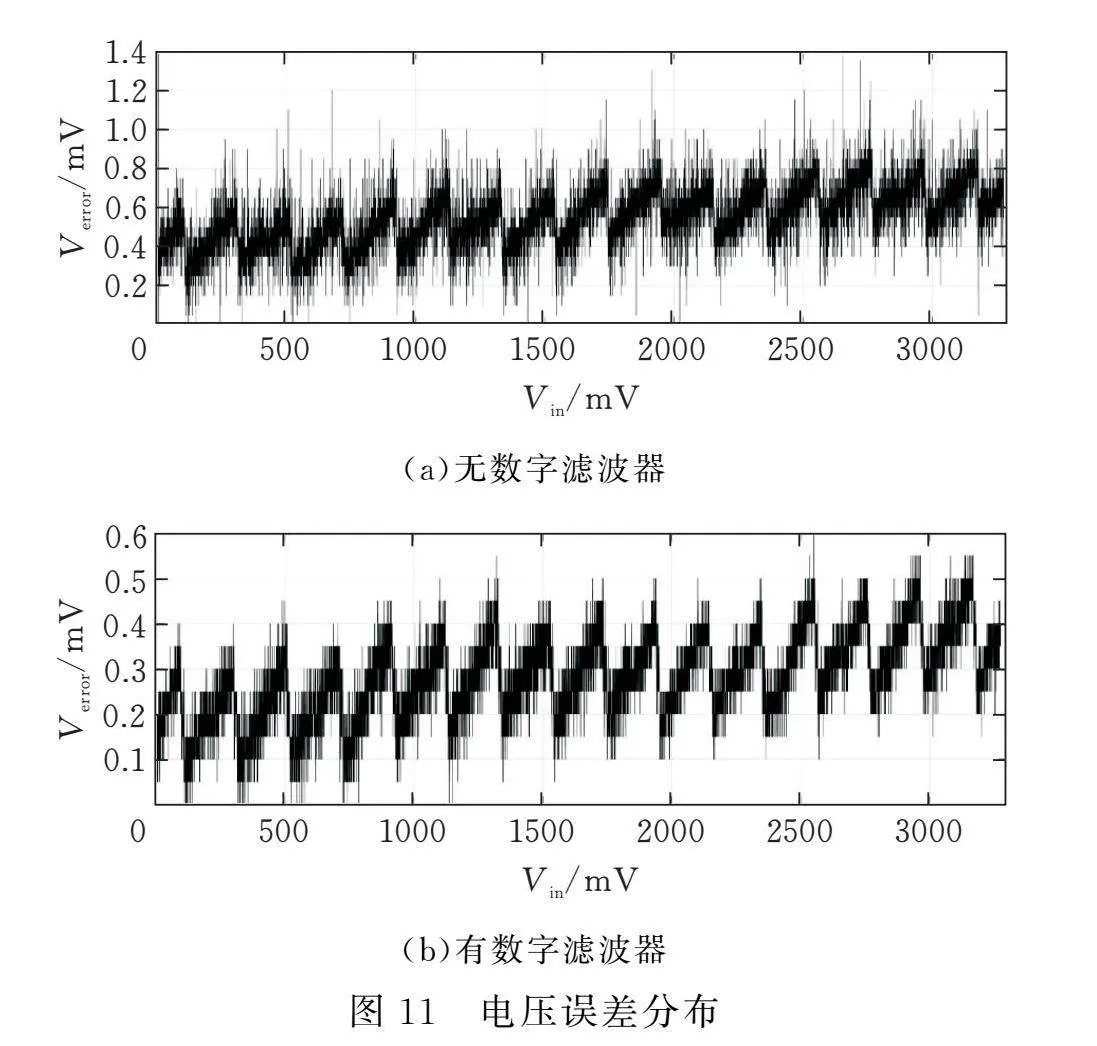
通過GS200向芯片的GPIO引腳發射0-3.2768 V的斜坡電壓,步進電壓為200 uV。采集電壓的絕對誤差
Verror[i]=|Vout[i]-Vin[i]|(4)
式中:Vout[i]指采集到的電壓值,Vin[i]指標準電壓,i為步進次數(i = 0-16384)。
圖11是濾波前后斜坡電壓測試的實驗結果。可以看出,芯片的采集電壓誤差在量程范圍內變化都較穩定。濾波后采集電壓的最大誤差為0.6 mV,而濾波前的最大誤差為1.4 mV。
3.3 芯片應用測試
該芯片在實際應用中需要將16節電池的正負極依次連接在芯片的CINlt;0gt;-CINlt;16gt;引腳上,同時讀取芯片所有的CIN引腳和DIS引腳的電壓。為了模擬其實際應用場景,采用模擬電芯的16個電壓通道同時向芯片的CIN引腳輸送電壓,驗證電壓采集系統在多電壓采集時的精確性以及均衡通道開關是否正常。
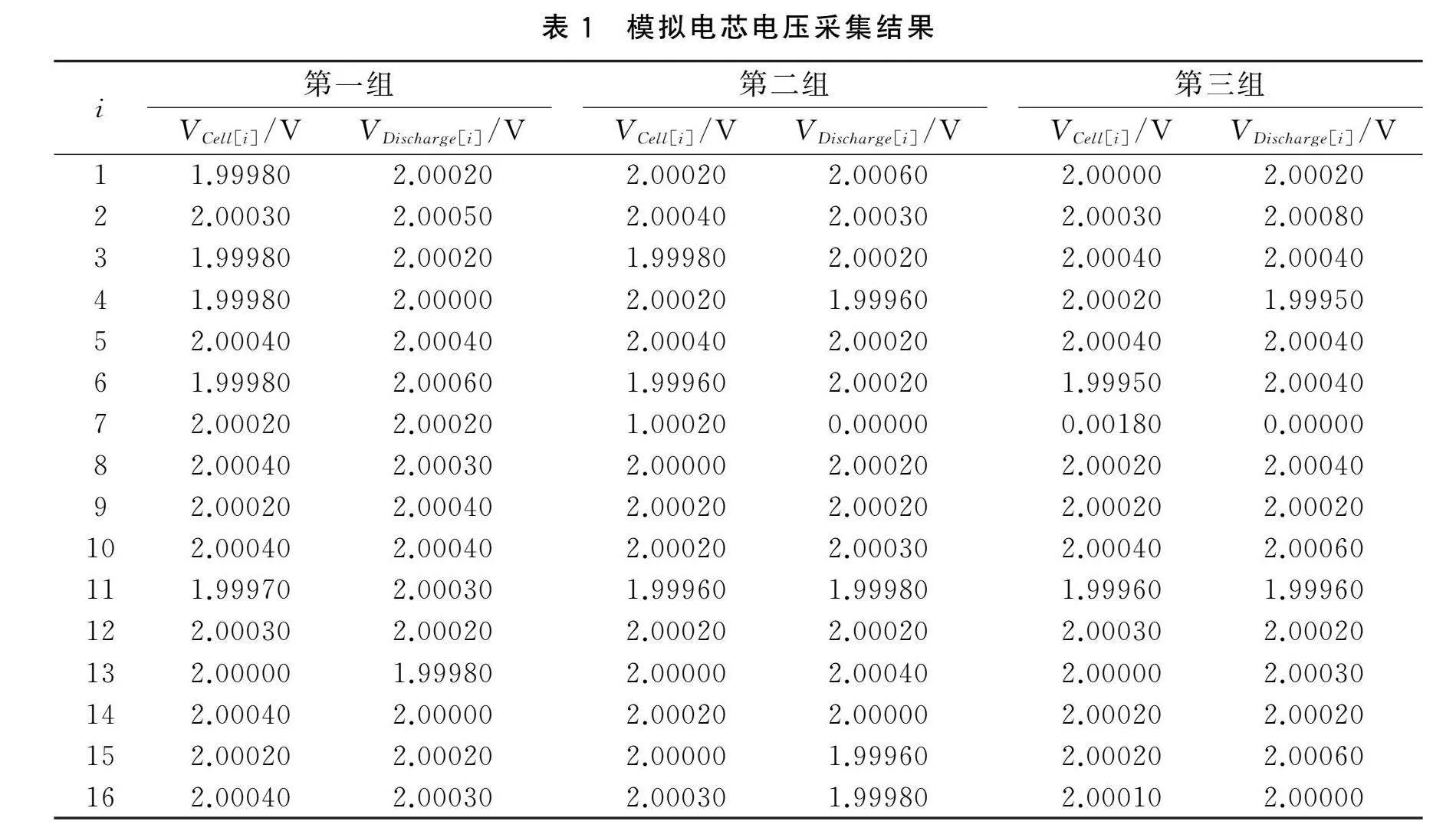
分別采集三組數據,第一組為模擬電芯的16個通道,均輸出2 V標準電壓;第二組為第7通道的輸出電壓1 V,其他通道的輸出電壓為2 V;第三組實驗中第7通道的輸出電壓關閉,其他通道電壓為2 V。表1為三組實驗中,經數字濾波后采集的VCell[i]和VDischarge[i]的數據。
通過三組實驗數據可知電壓VCell[i]的誤差基本上都在1 mV以內。第三組的讀取電壓VCell[7]誤差為1.8 mV,當模擬電芯的第7通道關閉時CINlt;6gt;和CINlt;7gt;引腳間的壓差會受到相鄰通道的電壓影響,導致誤差偏大。當模擬電芯的第7通道的輸入電壓是1 V和0時,芯片的均衡通道開啟使DISlt;6gt;和DISlt;7gt;之間的電壓差變為0 V。該芯片實際應用于新能源汽車時可以通過VCell[i]來觀察電池電壓,而VDischarge[i]電壓可用于判斷芯片內部的均衡通道開關的狀態。
4 結束語
本文根據自研的電池管理芯片GMD1002設計了一種基于STM32的電壓采集系統。該系統可同時采集16節電池電壓。實驗使用精密電源GS200對系統進行固定電壓測試和斜坡電壓測試,實驗結果證明數字濾波器可以降低采集電壓的誤差,提高采集電壓的準確性,且芯片在量程范圍內的采集電壓誤差變化范圍在2 mV以內。實驗使用模擬電芯來模擬系統同時采集16節電池的電壓。實驗結果表明:系統在使用數字濾波器的情況下,采集電壓的誤差基本上在1 mV以內,只有少數極端情況誤差會超過1 mV,并且實驗證明該芯片的均衡通道的功能正常。本文設計的電壓采集系統對于其他相似的電池管理芯片測試具有一定的參考價值,系統測試的結果穩定,數據可靠且成本低廉,便于普及。
[ 參 考 文 獻 ]
[1] SUN B X,ZHAO X Z,HE X T,et al. Virtual battery pack-based battery management system testing framework[J]. Energies,2023,16(02):680.
[2] 曲行行,楊亭亭,鄒娟,等.BQ76PL536A的分布式動力電池管理系統設計[J].單片機與嵌入式系統應用,2018,18(12):33-36.
[3] 石建文,陳海峰,杜玉環.基于LabVIEW的電池管理系統設計[J].制造業自動化,2020,42(07):118-122.
[4] 查曉銳,晉成鳳,趙謙,等. 基于MC9S12與LTC6811的儲能電站電池管理系統設計[J].電機與控制應用,2020,47(07):58-61.
[5] KUTKUT N H , WIEGMAN H L N . Design considerations for charge equalization of an electric vehicle battery system[J]. IEEE Transactions on Industry Applications,1999,35(01):28-35.
[6] ZHANG T S, LI Y M. Data acquisition design based on the STM32[J]. Advanced Materials Research,2012,2076(591-593):1527-1530.
[7] ZHANG Q D, YANG Y T, CHAI C C. A high EMS daisy-chain SPI interface for battery monitor system[J]. Journal of Semiconductors,2017,38(03):124-128.
[8] 殷廣輝.基于STM32的CAN總線通信節點設計[D].長春:吉林大學,2017.
[9] 劉大鵬. 基于 STM32 單片機的 CAN-USB 轉換器設計[J].工業技術創新,2014,01(05):589-593.
[10] 王廣勝,張若兮.基于stm32的CAN通信[J].電腦知識與技術,2017,13(09):30-31.
[11] 邢洋,李立偉,張洪偉.基于STM32單片機的CAN總線分析儀的設計[J]. 青島大學學報(工程技術版),2013,28(01):19-21.
[12] JEFFREY R. NET[J]. MSDN magazine,2001,16(08):119-122.
Design and Optimization of Voltage AcquisitionSystem Based on GMD1002
ZHANG Ze1,YAO Yucheng1,BAO Di2,LI Mincheng1, DENG Xiaoyue1
(1 School of Science, Hubei Univ. of Tech., Wuhan 430068, China;2 Geo Micro Devices (Xiamen) Co., Ltd., Shanghai 201203, China)
Abstract: The battery management chip monitors the health of battery by collecting battery voltage. It is able to provide battery protection and voltage equalization optimization. The accuracy of voltage acquisition is one of the main performance parameters of the battery management chip. Based on the self-developed vehicle-gauge battery management chip GMD1002, a battery voltage acquisition system with STM32 as the main control chip is designed. The digital filter is designed to match the voltage acquisition characteristics of the GMD1002 chip. High precision voltage source and battery simulator are used to test the performance of fixed voltage acquisition, ramp voltage acquisition and battery voltage equalization control of the system. The results show that the digital filter can effectively reduce the influence of transientpulses, the fixed voltage reading error is within 1 mV; and the ramp voltage reading error is within 2 mV in the range of 0~3.2768 V.T he battery equalization control function inside the chip is normal, and the system has a good battery management function.
Keywords: battery management chip; digital filter; battery equalization control; voltage acquisition
[責任編校: 閆 品]
