OBE 理念下項目驅動的機器視覺技術及應用課程教學改革與實踐
2023-12-28 13:59:06施瀅王艷曹芳
中國設備工程 2023年24期
施瀅,王艷,曹芳
(南京理工大學紫金學院,江蘇 南京 210023)
1 前言
機器視覺技術作為一種融合信息技術、控制技術、計算機技術和人工智能等多方面的新技術,已在機器人導航、無人駕駛、智能檢測、信息壓縮與檢索等鄰域得到了越來越多的應用。機器視覺技術及應用課程,對學生的實踐實驗要求較高。但是,該課程的理論較多且較難,傳統的課程內容過于深奧,不太符合獨立學院應用型人才培養目標,容易使學生產生強烈的挫敗感,無法激起學生的研究欲望,學習效果較差。
對于培養應用型人才,按照原有的以算法的數學推導為主,工科教學理科化模式容易使學生陷入復雜的數學公式中而脫離實際應用,滿堂灌輸枯燥的數學知識,使學生很快失去興趣,課程學到最后仍然不清楚“為什么”和“怎么用”,實踐教學與企業需求脫節,導致解決實際工程問題的能力有限。因此,如何將一個具體的實際項目分解為相關的實踐教學模塊,與課程教學知識點相融合,在OBE 的理念下用項目驅動教學,能有效地提高學生的學習興趣,提高教學質量,能更好地培養學生解決較復雜工程項目的能力。如何根據OBE 理念,將實際項目融入課程,完善課程教學內容,具有重要的研究價值。
2 項目驅動的教學內容改革
2.1 選取基于機器視覺的手勢識別控制系統項目進行教學內容設計
在實際工程項目中,基于機器視覺的手勢識別控制系統,主要由視頻/圖像輸入、預處理、特征提取、手勢識別和鼠標控制等5 部分組成;機器視覺技術及應用課程,主要由圖像與視覺系統、圖像分析基礎、圖像變換、圖像增強、圖像分割、圖像識別和機器視覺的高級感知等7 部分組成,根據課程教學大綱,將實際項目進行分解,融入教學,設計完成的教學內容,兩者的對應關系如圖1 所示。
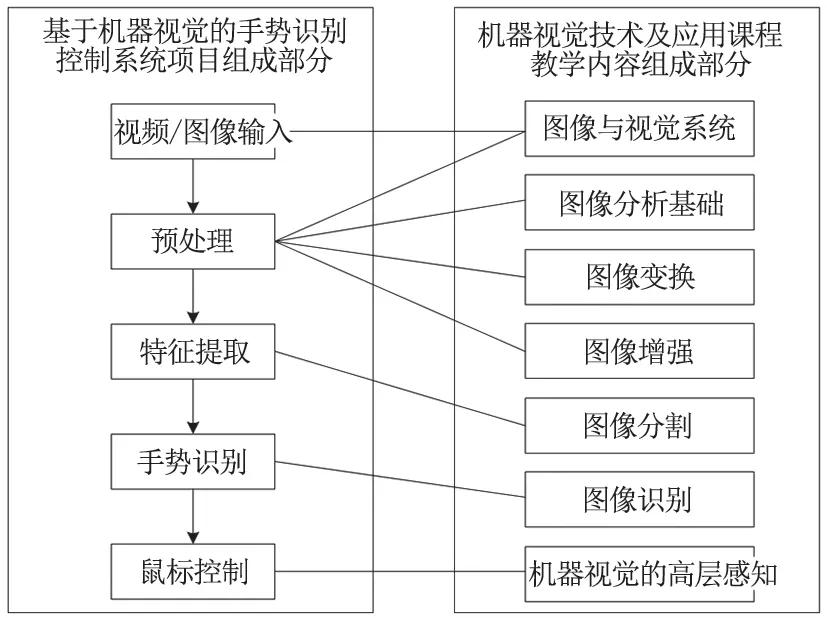
圖1 課程教學內容與項目的對應關系
2.2 設計完成優化的課程具體內容
選取的實際項目基于機器視覺的手勢識別控制系統,根據課程大綱,可分為以下5 個模塊。
模塊一:視頻/圖像輸入,主要實現:(1)圖像文件讀入和顯示;(2)讀視頻文件和運動物體檢測。
模塊二:預處理,主要包括去噪、膚色檢測、二值化、形態學處理、輪廓提取,其中較為重要的是膚色檢測和輪廓提取。去噪即濾波,主要是為了實現對圖像噪聲的消除,增強圖像的效果,可以結合實際實驗效果選擇是否在獲取圖像后先進行濾波,在膚色檢測后會有二次濾波。膚色檢測主要方法有:基于RGB 顏色空間、基于HSV 顏色空間和基于YCrCb 顏色空間。形態學處理,即便是比較好的膚色檢測算法,分割出來的手勢,也難免有黑點,或者背景有白點,需要對分割出來的手勢圖進行進一步處理,主要是腐蝕和膨脹兩個操作。腐蝕和膨脹是針對白色部分(高亮部分)。輪廓提取是對膚色檢測后的圖像提取手勢區域。
模塊三:特征提取,手勢特征多種多樣,可以多特征融合,提高手勢識別正確率。如對輪廓點坐標的傅里葉描述子的提取。
模塊四:手勢識別,手勢識別主要包括建立特征庫、建模、訓練、匹配等。建立特征庫,采集手勢1 ~10,同時利用旋轉平移等操作對得到的手勢庫進行擴充。對整個手勢庫中的每張照片中的手勢。
輪廓線計算傅里葉描述子并保存。
模塊五:鼠標控制,需要在程序中模擬鼠標的移動、點擊等動作。如何調用Windows API 函數實現鼠標模擬操作的功能。通過手勢識別控制鼠標動作,可以在畫圖中畫畫、玩相關游戲等,提高學生學習興趣。
3 教學模式的改革
3.1 教學模塊、模式和形式的優化
機器視覺技術及應用課程需要有數字圖像處理和機器視覺的理論知識,本門課程共48 學時,分理論教學32 學時和實踐教學16 學時。在近年來的教學過程中,一直探索如何充分融合理論教學和實踐教學,能讓學生在課程學時內完成理論知識學習和系統設計,總結如圖2。

圖2 教學模塊、教學模式和教學形式的優化
教學模塊主要分3 大部分:理論知識、實踐能力和創新設計。
理論知識模塊,主要采用翻轉課堂模式進行教學。課前,教師將本節課即將學習的理論知識歸納總結成文字和視頻發布到班級群,學生利用課余時間進行課前預習和自主學習。課堂中,主要采用案例式教學模式,根據課前學生反饋,總結出本章節重點和難點進行引導式學習,解決學生疑難問題,提高課堂上課效率。采用翻轉課堂和項目驅動教學模式研究討論理論難點和最新研究成果,引導學生積極思考,解決問題,提升學生的獨立思考能力和團隊合作能力。課后,學生可以參加學術報告講座,開闊學生視野,提高學生學習興趣。
實踐能力模塊,需要學生在學習完課程后完成基于機器視覺的人機交互系統設計。實驗主要分五個小項目完成,分別在學習完該項目對應的理論知識后完成,并在最后系統性完成整體設計,實驗環節五個小項目與課程對應關系如圖1。理論知識學習完會將涉及該知識點的項目任務布置給學生,學生通過知識點的學習,結合論壇、文獻等網絡資源設計項目方案;學生可以相互交流,教師引導學生逐步實現項目任務。通過項目式驅動教學模式,提高學生學習課程興趣,更好地培養了學生課程設計的綜合能力。
創新設計模塊,主要目標就是培養能解決實際工程問題的應用型工程師,本文提到立足獨立學院的實際辦學情況,主要依托學科競賽賽題,并結合實際工程項目,將較大較復雜的工程項目,進行顆粒化分解,形成相應的實際教學內容。根據不同難度梯度劃分的教學內容,引導學生進行探索實踐,構成本文的探索式教學方法。學生通過該模塊的培養,可以自主探索感興趣的工程項目問題和培養團隊合作意識。通過自主組合團隊的方式,獨立申請相應的江蘇省大學生創新創業訓練計劃項目、學校學生科研訓練計劃、參加全國性高水平學科競賽來進行相關的創新實踐。依托和國內外知名企業合作的大學生創新創業基地和聯合實驗的平臺,結合企業實際需求,圍繞一系列產教融合課程開發,進一步優化了產教融合專業建設。
3.2 強化OBE 的項目解決能力的改進課程考核方式
傳統的課程的考核主要是由平時成績和期末考試成績※兩部分組成,但是,該課程以實踐項目解決知識點融入課程內容,同時根據OBE 理念,重點突出考核學生的實踐項目解決能力,突出學生的創新實踐能力的培養。考核成績根據課程采用的基于機器視覺的手勢識別控制系統五個部分,采用筆試(50%)+項目完成度(50%),其中項目完成度分數由第一部分(5%)、第二部分(10%)、第三部分(10%)、第四部分(15%)和第五部分(10%)成績。在學生完成創新實踐設計后進行分組答辯,答辯過程中重點關注學生是分析問題、解決問題以及設計創新點,這種過程化考核方式可以更好評估學生創新實踐能力。
4 結語
隨著OBE 教學理念在《機器視覺技術及應用》課程中的應用,打開了一個全新的教學方法。通過理論知識、實踐能力和創新設計,結合翻轉課堂、項目驅動式教學和探索式教學等,有效地提升學生獨立思考能力、團隊合作能力,提高學生參與度和積極性。利用過程化考核方式激發了學生的學習興趣與內在動力,提高教學質量及效率。
猜你喜歡
內蒙古教育(2021年20期)2021-03-08 01:09:14
甘肅教育(2020年14期)2020-09-11 07:57:50
計算機教育(2020年5期)2020-07-24 08:53:38
家庭影院技術(2019年11期)2019-12-09 09:14:30
東方教育(2017年19期)2017-12-05 15:14:48
課程教育研究(2017年40期)2017-11-17 16:29:05
唐山文學(2016年2期)2017-01-15 14:03:59
中學歷史教學(2016年4期)2016-11-11 07:11:44
中學歷史教學(2015年12期)2015-11-11 07:09:49
體育師友(2013年6期)2013-03-11 18:52:18
