基于差分進(jìn)化的交流伺服電機(jī)抗干擾補(bǔ)償控制方法
2023-12-28 06:51:48溫發(fā)林馬桂芳王清輝劉鳳琳
通信電源技術(shù) 2023年20期
溫發(fā)林,曾 瑋,馬桂芳,王清輝,王 穎,劉鳳琳
(龍巖學(xué)院,福建 龍巖 364012)
0 引 言
在機(jī)械控制系統(tǒng)中,交流伺服電機(jī)在實(shí)際工作過程中經(jīng)常會(huì)受到外部環(huán)境和噪聲的干擾,因此需要提高交流伺服電機(jī)的抗干擾補(bǔ)償能力。有研究學(xué)者將改進(jìn)的S 型控制算法運(yùn)用到STM32 單片機(jī)上,實(shí)現(xiàn)對(duì)交流伺服電機(jī)的控制,但是難以適應(yīng)動(dòng)態(tài)系統(tǒng)的控制需求[1]。
差分進(jìn)化算法主要利用變異、交叉以及選擇3 種操作來完成優(yōu)化問題的求解,能夠?qū)Ω黝悘?fù)雜非線性問題進(jìn)行有效優(yōu)化[2]。因此,本文基于差分進(jìn)化算法提出一種交流伺服電機(jī)抗干擾補(bǔ)償控制方法。
1 建立控制數(shù)學(xué)模型
根據(jù)交流伺服電機(jī)的動(dòng)態(tài)特性和干擾源建立控制數(shù)學(xué)模型,并采用狀態(tài)空間方程的形式描述其動(dòng)態(tài)響應(yīng)[3]。通過建立數(shù)學(xué)模型,可以更準(zhǔn)確地描述電機(jī)的運(yùn)行狀態(tài)和控制系統(tǒng)的工作原理。根據(jù)電機(jī)的控制規(guī)律,通過控制電機(jī)的輸入電流、脈沖頻率來控制電機(jī)的轉(zhuǎn)速、轉(zhuǎn)矩,從而實(shí)現(xiàn)電機(jī)的精確控制。建立交流伺服電機(jī)控制的數(shù)學(xué)模型,即
式中:ud、uq為d軸和q軸的電壓控制分量;id、iq為d軸和q軸的電流控制分量;ωr為轉(zhuǎn)矩速度;Ld、Lq為d軸和q軸的負(fù)載轉(zhuǎn)矩;c為脈沖頻率。通過建立的數(shù)據(jù)模型,電磁推力的計(jì)算公式為
式中:Fe為電磁推力;ψq、ψd為d軸和q軸的電機(jī)功率;ed、eq為d軸和q軸的負(fù)載慣量。交流伺服電機(jī)控制力的計(jì)算公式為
式中:f為控制力;v為電信號(hào)傳播速度;M為電機(jī)負(fù)載的質(zhì)量;Q為摩擦系數(shù)。
在交流伺服電機(jī)的控制模型中,采用上述數(shù)學(xué)模型,通過抗干擾補(bǔ)償控制的外部干擾以及模型參數(shù)變化引起的差值進(jìn)行等效輸入,進(jìn)行有效控制。
2 確定交流伺服電機(jī)抗干擾補(bǔ)償狀態(tài)
結(jié)合控制數(shù)學(xué)模型,分析交流伺服電機(jī)的抗干擾補(bǔ)償狀態(tài),對(duì)交流伺服電機(jī)的抗干擾估計(jì)值進(jìn)行計(jì)算,其公式表示為
式中:d'為抗干擾的估計(jì)值;Gp為被控對(duì)象的傳遞函數(shù);Gn為數(shù)學(xué)模型的傳遞函數(shù);b為干擾系數(shù)。根據(jù)式(4)可以看出,交流伺服電機(jī)抗干擾補(bǔ)償控制與干擾源的傳播速度以及強(qiáng)度有關(guān),隨著電流信號(hào)傳播速度的加快,其干擾預(yù)測值也在隨之增加。抗干擾補(bǔ)償控制后的電流值為
式中:i為抗干擾補(bǔ)償控制后的電流值;ω為發(fā)電機(jī)的角速度;L為調(diào)整參數(shù)后的電感值。在電機(jī)中接入抗補(bǔ)償干擾控制器,將所采集的數(shù)據(jù)輸入到式(5)中,可以得出抗干擾控制的電流值。設(shè)定抗干擾補(bǔ)償閥值,如果電流值小于設(shè)定的閥值,則表示其抗干擾補(bǔ)償效果處于正常范圍,不需要進(jìn)行控制;如果電流值大于設(shè)定的閥值,則表示其受到外部干擾源的影響較大,電流傳輸速率不穩(wěn)定,需要通過差分進(jìn)化算法對(duì)其進(jìn)行自動(dòng)化控制[4]。
3 基于差分進(jìn)化的抗干擾補(bǔ)償自適應(yīng)控制
在確定了交流伺服電機(jī)的抗干擾補(bǔ)償狀態(tài)后,運(yùn)用差分進(jìn)化法對(duì)交流伺服電機(jī)抗干擾補(bǔ)償自適應(yīng)控制速率進(jìn)行調(diào)整,降低外部干擾源對(duì)交流伺服電機(jī)的干擾補(bǔ)償控制。使用比例、積分和微分(Proportional Integral Derivative,PID)控制器,通過串聯(lián)和并聯(lián)的方式將PID 控制器接入到電機(jī)中,定義控制器的參數(shù)向量,即差分進(jìn)化算法需要優(yōu)化的變量。計(jì)算適應(yīng)度函數(shù)并排序,將每個(gè)個(gè)體的參數(shù)向量帶入控制器結(jié)構(gòu),計(jì)算對(duì)應(yīng)的控制能力指標(biāo)作為適應(yīng)度函數(shù)值,如系統(tǒng)穩(wěn)態(tài)誤差、響應(yīng)時(shí)間等。然后,按照函數(shù)值由小到大排序,得到差分進(jìn)化算法下的自適應(yīng)控制參數(shù)。
通過應(yīng)用差分進(jìn)化算法,能夠?qū)ふ业阶顑?yōu)解。首先,在尋找最優(yōu)解的過程中定義了一個(gè)適應(yīng)度函數(shù),該函數(shù)能夠評(píng)估每個(gè)可能解決方案的質(zhì)量(即個(gè)體的適應(yīng)度);其次,從所有個(gè)體中挑選出具有最優(yōu)適應(yīng)度函數(shù)值的個(gè)體,將其作為最終控制器的參數(shù)向量;最后,輸出該向量作為問題的最優(yōu)解。需要注意的是,差分進(jìn)化算法中需要設(shè)置一些參數(shù),如初始種群大小、差分變異系數(shù)等,這些參數(shù)對(duì)算法的收斂性和效率有重要影響,需要根據(jù)實(shí)際情況進(jìn)行選擇。
當(dāng)滿足設(shè)定的迭代次數(shù)或達(dá)到目標(biāo)函數(shù)要求時(shí),停止進(jìn)化過程。輸出最優(yōu)解,即使適應(yīng)度函數(shù)達(dá)到最小值。通過以上步驟,就可以使用差分進(jìn)化算法進(jìn)行抗干擾補(bǔ)償自適應(yīng)控制。需要注意的是,差分進(jìn)化算法對(duì)初始種群的選擇和參數(shù)的調(diào)整會(huì)影響最終結(jié)果的質(zhì)量,這些參數(shù)對(duì)算法的收斂性和效率有重要影響[5]。
4 實(shí)驗(yàn)論證
為了更好地驗(yàn)證本文提出的基于差分進(jìn)化的交流伺服電機(jī)抗干擾補(bǔ)償控制方法的有效性,搭建實(shí)驗(yàn)環(huán)境,采用MATLAB 軟件,加入自抗擾控制器,將本文的設(shè)計(jì)方法與傳統(tǒng)方法進(jìn)行對(duì)比實(shí)驗(yàn),檢驗(yàn)設(shè)計(jì)方法的控制效果。
4.1 實(shí)驗(yàn)準(zhǔn)備與設(shè)計(jì)
本文設(shè)計(jì)方法的性能尚未得知,故選擇某交流伺服電機(jī)中的抗干擾補(bǔ)償控制器為對(duì)象。為了驗(yàn)證本文所提出控制方法的有效性,基于差分進(jìn)化算法對(duì)電機(jī)的抗干擾補(bǔ)償能力進(jìn)行實(shí)驗(yàn)對(duì)比。為了保證實(shí)驗(yàn)數(shù)據(jù)與實(shí)驗(yàn)結(jié)果具有一定的說明性,設(shè)計(jì)對(duì)比實(shí)驗(yàn),將本文所提的基于差分進(jìn)化的交流伺服電機(jī)抗干擾補(bǔ)償控制方法作為實(shí)驗(yàn)組,將使用PID 控制器的傳統(tǒng)方法1 和傳統(tǒng)方法2 作為對(duì)比方法,共同對(duì)交流伺服電機(jī)進(jìn)行控制,對(duì)比經(jīng)過3 種方法控制后交流伺服電機(jī)的狀態(tài)。將2 種控制器分別接入到交流伺服電機(jī)中,設(shè)置2 種控制器都處于穩(wěn)定運(yùn)行狀態(tài),具體參數(shù)控制情況如表1 所示。
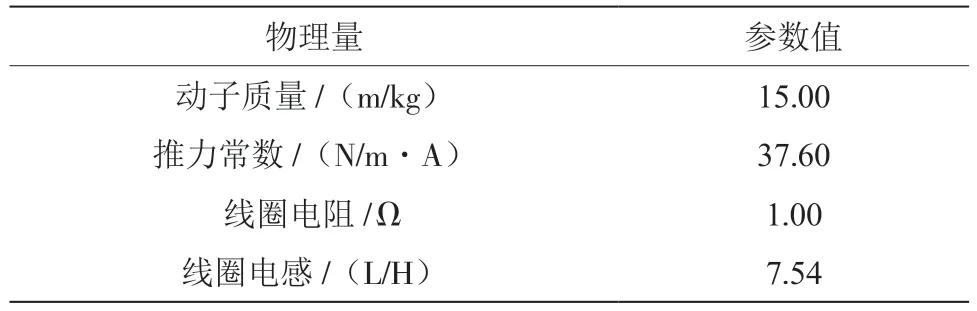
表1 控制參數(shù)設(shè)定
設(shè)置好控制器參數(shù)后,開展交流伺服電機(jī)抗干擾補(bǔ)償控制的測試,以下對(duì)具體控制效果進(jìn)行檢驗(yàn)。
4.2 實(shí)驗(yàn)結(jié)果及討論
以抗干擾補(bǔ)償穩(wěn)定性為評(píng)價(jià)指標(biāo),在相同的電流傳輸速度下,抗干擾補(bǔ)償效果越好,其控制能力就越強(qiáng),算法也更科學(xué)。3 種方法對(duì)交流伺服電機(jī)進(jìn)行控制后,電機(jī)轉(zhuǎn)速對(duì)比結(jié)果如圖1 所示。

圖1 在相同時(shí)間下3 種控制方法速度對(duì)比
從圖1 可以看出,在相同時(shí)間下,使用傳統(tǒng)方法1 對(duì)交流伺服電機(jī)進(jìn)行控制后,電機(jī)的轉(zhuǎn)速能夠保持在800 ~1 500 r/min;使用傳統(tǒng)方法2 對(duì)交流伺服電機(jī)進(jìn)行控制后,電機(jī)的轉(zhuǎn)速能夠保持在1 000 ~1 600 r/min。這2 種方法控制后的電機(jī)轉(zhuǎn)速波動(dòng)范圍較大,沒有得到有效控制,控制效果不佳。而使用本文所提方法對(duì)交流伺服電機(jī)進(jìn)行控制后,電機(jī)的轉(zhuǎn)速能夠保持在1 600 ~1 700 r/min,轉(zhuǎn)速較高,并且較為穩(wěn)定,說明對(duì)交流伺服電機(jī)的控制能力更好,具有較好的效果。
為了進(jìn)一步驗(yàn)證本文設(shè)計(jì)方法的可行性與適用性,在同一時(shí)間段下對(duì)比各個(gè)控制方法的控制速率,使用電子表格記錄實(shí)驗(yàn)數(shù)據(jù),具體如表2 所示。
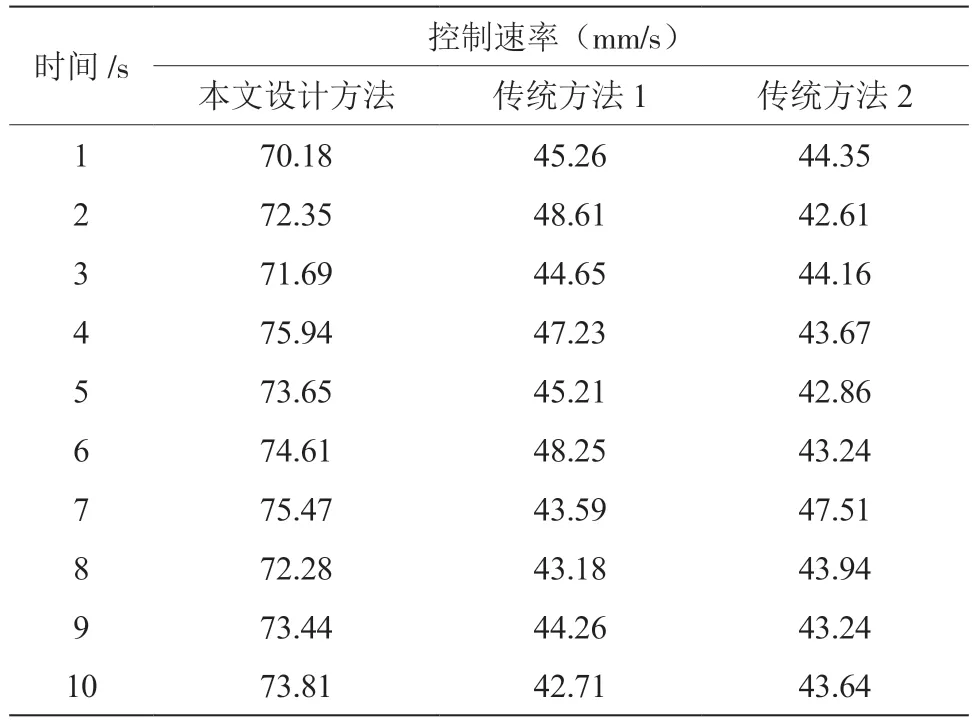
表2 3 種方法下控制速率的對(duì)比結(jié)果
從表2 可以看出,本文設(shè)計(jì)方法的最大控制速率為75.94 mm/s,最小控制速率僅為70.18 mm/s,平均控制速率為73.34 mm/s。相比之下,在傳統(tǒng)方法1 的控制下,控制速率明顯低于本文所設(shè)計(jì)的方法,其最大控制速率為48.25 mm/s,最小控制速率為42.71 mm/s,平均傳輸速率為45.29 mm/s;在傳統(tǒng)方法2 的控制下,最大控制速率為47.51 mm/s,最小控制速率42.61 mm/s,平均控制速率為43.92 mm/s。說明使用本文提出方法對(duì)交流伺服電機(jī)進(jìn)行控制時(shí),控制速率較高,能夠及時(shí)對(duì)電機(jī)進(jìn)行抗干擾補(bǔ)償控制,具有較好的控制效果。
實(shí)驗(yàn)結(jié)果證明,本文提出的基于差分進(jìn)化算法的交流伺服電機(jī)抗干擾補(bǔ)償控制方法,通過對(duì)控制算法進(jìn)行優(yōu)化,使其具備更好的適應(yīng)性和健壯性,在復(fù)雜環(huán)境中能夠?qū)崿F(xiàn)良好的控制效果。同時(shí),由于該方法不需要精確的干擾模型,因此可針對(duì)不同類型的干擾源進(jìn)行控制,具有較高的通用性和實(shí)用性[6]。
5 結(jié) 論
本文提出了一種基于差分進(jìn)化算法的交流伺服電機(jī)抗干擾補(bǔ)償控制方法,能夠有效提高控制力和控制速率,將電機(jī)轉(zhuǎn)速控制在較為穩(wěn)定的狀態(tài),具有較好的控制效果。通過將差分進(jìn)化算法下優(yōu)化的抗干擾補(bǔ)償控制引入交流伺服電機(jī),該方法能夠較好地應(yīng)對(duì)環(huán)境干擾和噪聲,提高了系統(tǒng)的抗干擾能力,使得整個(gè)系統(tǒng)更加穩(wěn)定和可靠。
猜你喜歡
科教新報(bào)(2022年12期)2022-05-23 06:34:16
今日農(nóng)業(yè)(2021年14期)2021-10-14 08:35:28
海峽姐妹(2020年8期)2020-08-25 09:30:18
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
人民中國(日文版)(2015年10期)2015-04-16 03:53:58
人民中國(日文版)(2015年9期)2015-03-20 15:08:12