基于TRIZ理論解決軌道式礦用巡檢機(jī)器人應(yīng)用場景受限的問題
2023-12-27 16:53:44張琦張偉王玨珺劉樹義
科技創(chuàng)新與品牌 2023年10期
張琦 張偉 王玨珺 劉樹義
摘 要:使用多種TRIZ理論將“軌道式礦用巡檢機(jī)器人”創(chuàng)新為“轉(zhuǎn)向履帶式雙目視覺礦用巡檢機(jī)器人(機(jī)械臂款)”,該機(jī)器人可自動識別視覺對象,分析視覺對象位姿信息及機(jī)械臂執(zhí)行端位姿信息,可手眼協(xié)調(diào)操作礦山相關(guān)機(jī)械,有效降低人工成本,提高礦山作業(yè)巡檢、管理、日常操作和臨危操作的智能化和無人化水平。
關(guān)鍵詞:TRIZ;轉(zhuǎn)向履帶;雙目視覺巡檢機(jī)器人
一、背景及意義
礦山行業(yè)擁有其他行業(yè)少見的安全風(fēng)險(xiǎn),針對皮帶運(yùn)輸、井下巷道、變電站、生產(chǎn)車間等位置的巡檢需求,我們自主研發(fā)了軌道式智能巡檢機(jī)器人,解決了該崗位人員巡崗距離長、難度大、人員緊缺的矛盾,基本實(shí)現(xiàn)了崗位無人化、智能化。該系統(tǒng)實(shí)現(xiàn)了有效的智能巡檢,但是軌道限制了系統(tǒng)的應(yīng)用場景,同時單目攝像機(jī)不能滿足獲取目標(biāo)深度信息的需求,對于礦山行業(yè)大型機(jī)械開關(guān)控制操作、急停按鈕操作、礦山變電站高低壓開關(guān)柜按鈕操作等人工操作不能進(jìn)行無人化替代。
二、初始問題形勢分析
2.1 當(dāng)前系統(tǒng)功能組成及工作原理
軌道式礦用巡檢機(jī)器人可以替代人工實(shí)現(xiàn)巡檢,該設(shè)備依靠攝像機(jī)和多種傳感器,在單軌道上往復(fù)運(yùn)行或在環(huán)形軌道上連續(xù)運(yùn)行,對生產(chǎn)環(huán)境、設(shè)備、工藝情況、生產(chǎn)安全情況及異常進(jìn)行觀察和判斷。系統(tǒng)由軌道、運(yùn)動控制模塊、智能算法模塊、通信模塊、射頻模塊、動力模塊、云臺、攝像頭、軟件平臺組成。
智能巡檢機(jī)器人通過運(yùn)動控制模塊實(shí)現(xiàn)在軌道上勻速行駛,通過動力模塊及充電系統(tǒng)實(shí)現(xiàn)無線充電電量供給,通過射頻模塊和RFID標(biāo)簽實(shí)現(xiàn)行駛位置定位與校正,通過雙光譜熱成像攝像機(jī)結(jié)合云臺實(shí)現(xiàn)溫度、故障及危險(xiǎn)識別,通過通信模塊結(jié)合無線終端實(shí)現(xiàn)上位機(jī)與機(jī)器人之間的通信,通過自主研發(fā)的軟件平臺實(shí)現(xiàn)圖像監(jiān)測及分析。
2.2 系統(tǒng)存在的問題
問題1:軌道式智能巡檢機(jī)器人有軌道限制,需要在應(yīng)用場景上空安裝軌道,雖設(shè)備擁有強(qiáng)大的巡檢功能,但適用范圍受限。
問題2:單目攝像頭無法獲取目標(biāo)的深度信息,不能確定目標(biāo)與機(jī)器人的相對位置。
問題3:只能進(jìn)行巡檢而沒有相應(yīng)的無人化操作,不能代替人執(zhí)行一些工作。
三、轉(zhuǎn)向履帶式雙目視覺礦用巡檢機(jī)器人設(shè)計(jì)
3.1 功能分析
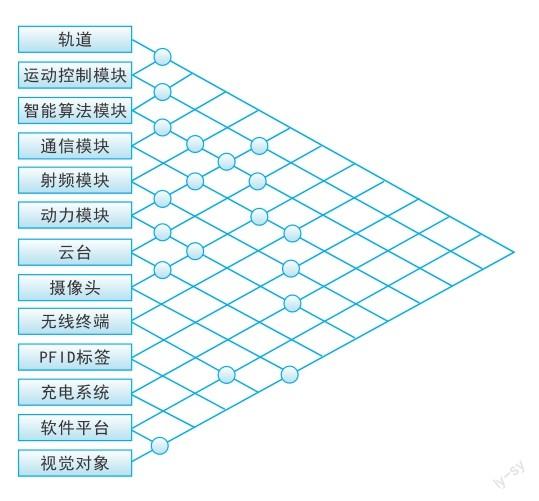
技術(shù)系統(tǒng)組件包括:軌道、運(yùn)動控制模塊、智能算法模塊、通信模塊、射頻模塊、動力模塊、云臺、攝像頭、軟件平臺。超系統(tǒng)組件包括:無線終端、RFID標(biāo)簽、充電系統(tǒng)。系統(tǒng)作用對象包括:被視覺識別的對象,可包括皮帶、泵、井下巷道中的設(shè)備或線路、變電站中的高低壓開關(guān)柜、生產(chǎn)車間中的設(shè)備等,以下簡稱視覺對象。根據(jù)相互作用分析表繪制結(jié)構(gòu)模型如下: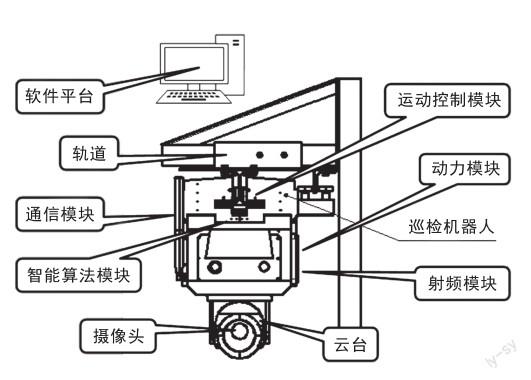
分析出主要功能是識別分析視覺對象。因此,搭建功能模型表,如下: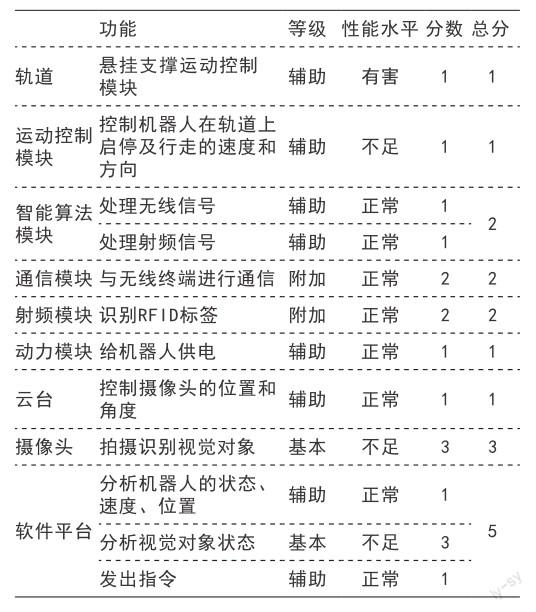
根據(jù)功能模型表,有害組件是軌道,功能不足組件是運(yùn)動控制模塊、攝像頭和軟件平臺。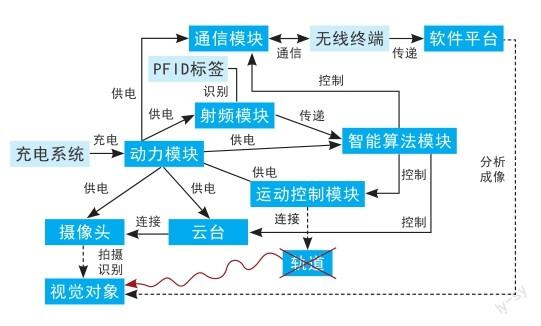
根據(jù)裁剪法實(shí)施的指導(dǎo)原則和功能分析表,軌道限制了機(jī)器人的使用場景和應(yīng)用對象,所以系統(tǒng)中存在有害的組件是軌道,因此從軌道開始裁剪。從而分析出方案提示一:去除軌道,改變機(jī)器人的運(yùn)動控制模塊,由軌道式更改為萬向輪式輪盤,360度行駛,使機(jī)器人靈活落地。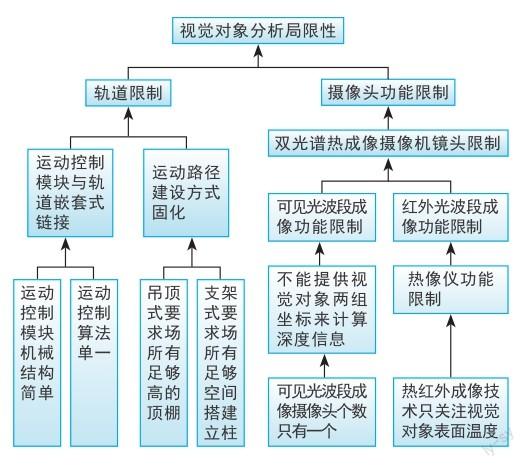
通過因果鏈分析選擇解決的原因是可見光波段成像攝像頭個數(shù)只有一個。分析出方案提示二:根據(jù)原因2.1.1.1.1,將單目攝像頭換成雙目攝像頭,讓機(jī)器具有人眼一樣的視覺系統(tǒng)對視覺對象進(jìn)行檢測與識別。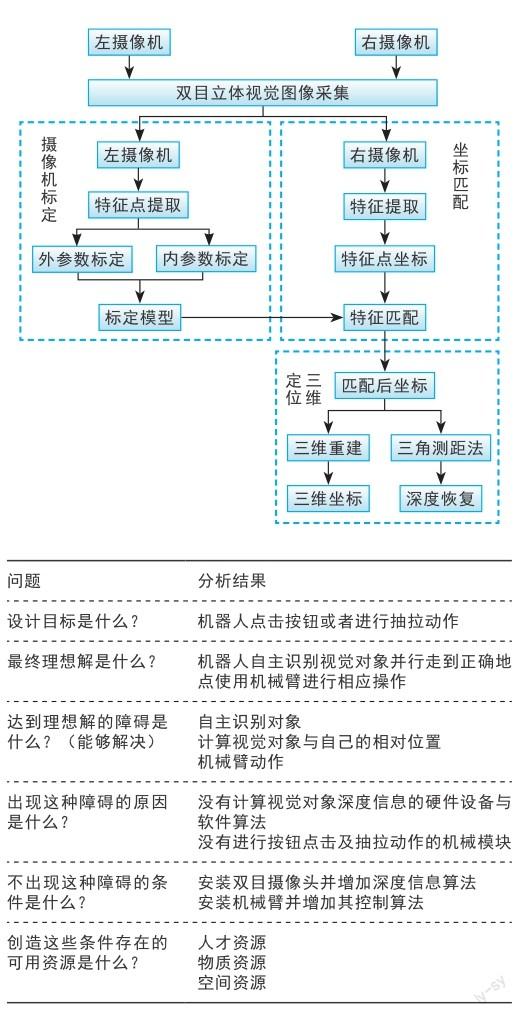
通過最終理想解分析出方案提示三:給機(jī)器人增加多關(guān)節(jié)可點(diǎn)可抓的機(jī)械臂并在軟件平臺增加其位姿控制算法。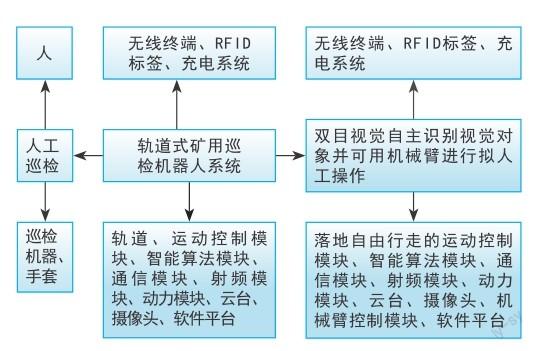
利用九屏幕法分析出方案提示四:在機(jī)械臂末端增加雙目攝像頭構(gòu)成手眼系統(tǒng),增大視野范圍。
綜上進(jìn)行總體資源分析進(jìn)一步推進(jìn)創(chuàng)新產(chǎn)品的研制與應(yīng)用。
四、研制與應(yīng)用
運(yùn)用TRIZ工具進(jìn)行系統(tǒng)問題的解決并對創(chuàng)新技術(shù)方案進(jìn)行梳理和評價。
技術(shù)矛盾:機(jī)器人需要用雙目攝像頭拍攝清晰的視覺對象,進(jìn)行目標(biāo)標(biāo)定,同時計(jì)算深度信息,指導(dǎo)機(jī)械臂位姿控制,進(jìn)而進(jìn)行擬人化操作。
攝像頭集成到機(jī)械臂執(zhí)行器上,帶來了當(dāng)目標(biāo)物體距離很近的情況下觀察不到的問題(針對矛盾矩陣NO.24信息損耗)。將攝像頭與機(jī)械臂分別擺放,補(bǔ)償了信息損耗的問題,拉遠(yuǎn)攝像頭的同時產(chǎn)生了攝像頭像素增加及變焦能力增加的問題,增添了系統(tǒng)控制的復(fù)雜性(針對矛盾矩陣NO.37控制復(fù)雜性)。
可使用的工具有:NO.35性能轉(zhuǎn)換法、NO.33同化法、NO.27替代法、NO.22變害為利法。
選擇NO.35性能轉(zhuǎn)換法,提出方案提示五:將攝像頭基于位置的視覺控制系統(tǒng)性能增加,改變軟件平臺靈活性程度來應(yīng)對系統(tǒng)控制復(fù)雜性。
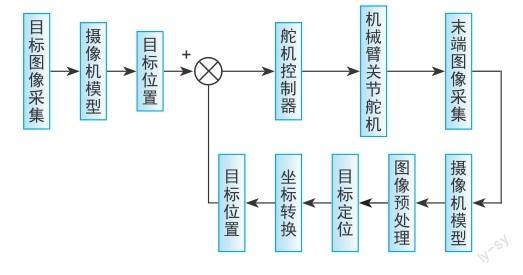
基于位置的視覺控制系統(tǒng)可以單獨(dú)計(jì)算目標(biāo)物體的三維坐標(biāo)和姿態(tài),這樣既簡化了視覺伺服硬件設(shè)備,又能在控制機(jī)械臂位姿的過程中正常應(yīng)用。如圖所示,把對目標(biāo)物體定位的位置信息當(dāng)做系統(tǒng)給定,在系統(tǒng)中的反饋環(huán)節(jié)計(jì)算位置。
物理矛盾:攝像頭與機(jī)械臂距離既要遠(yuǎn)又要近。
TC1:如果攝像頭與機(jī)械臂執(zhí)行器距離特別近,視野范圍增大了,但是攝像頭跟隨機(jī)械臂運(yùn)動(Eye-in-hand形式),攝像頭拍攝到的理想圖像特征會模糊。
TC2:如果攝像頭與機(jī)械臂分開放置(Eye-to-hand形式),雖然理想圖像特征清晰了,但是增加了軟件平臺控制算法的難度。
解決辦法:條件分離
方案提示六:將雙目攝像頭架設(shè)位置成像中心與機(jī)械臂基座平轉(zhuǎn)軸中心俯視重疊,與機(jī)械臂執(zhí)行器初始位置中心后視重疊。
物場模型:在設(shè)計(jì)機(jī)器人從軌道落地的過程中,希望機(jī)器人在視覺對象周圍能360度旋轉(zhuǎn)行進(jìn),所以選擇了萬向輪運(yùn)動盤,但是該運(yùn)動盤也有運(yùn)動限制。
問題:機(jī)器人在地面行駛中遇到樓梯和大顆粒障礙,行走不過去。
物-場分析(效應(yīng)不足的完整模型)
S1:地面,S2:輪盤,F(xiàn):機(jī)械場。選擇S3替代S2。S3:轉(zhuǎn)向履帶輪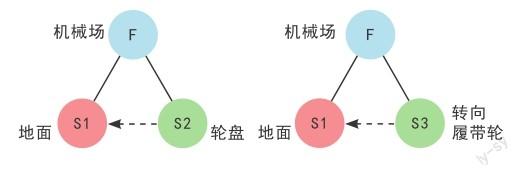
通過物場分析得出方案提示七:將機(jī)器人的輪子更換為轉(zhuǎn)向履帶輪,在礦山環(huán)境下可以爬樓梯、爬坡以及碾壓大顆粒障礙行進(jìn)。
對整體系統(tǒng)進(jìn)行專利檢索,相關(guān)內(nèi)容僅有2條,所以轉(zhuǎn)向履帶式雙目視覺礦用巡檢機(jī)器人(機(jī)械臂款)處于性能參數(shù)快速提高,需求量、產(chǎn)量迅速增加階段,對照S曲線為成長期。處于成長期,根據(jù)S曲線與進(jìn)化法則之間的關(guān)系選用子系統(tǒng)不均衡進(jìn)化法則。
用子系統(tǒng)不均衡進(jìn)化法則對雙目攝像頭、轉(zhuǎn)向履帶、機(jī)械手臂和軟件平臺進(jìn)行一體化優(yōu)化設(shè)計(jì)得出全部技術(shù)方案:
轉(zhuǎn)向履帶式雙目視覺礦用巡檢機(jī)器人(機(jī)械臂款)是由雙目攝像機(jī)、云臺、多關(guān)節(jié)可點(diǎn)可抓的機(jī)械臂、運(yùn)動控制模塊(轉(zhuǎn)向履帶)、智能算法模塊、通信模塊、射頻模塊、動力模塊、軟件平臺組成。雙目攝像機(jī)是視覺定位系統(tǒng)中最重要的硬件,兩個攝像頭距離12cm,圖片分辨率為1280×960,視場角66°,具有自動調(diào)焦功能,確保采集豐富的視覺信息。系統(tǒng)的執(zhí)行機(jī)構(gòu)機(jī)械臂,通過旋轉(zhuǎn)關(guān)節(jié)和平動關(guān)節(jié)完成操作指令,控制處理器采用高性能、低成本的STM32系列,快速求解機(jī)械臂逆運(yùn)動學(xué)參數(shù)。
PBVS通過攝像機(jī)采集圖像進(jìn)行三維重建得到目標(biāo)物體的位姿信息和機(jī)械臂末端執(zhí)行器的當(dāng)前位姿,然后將目標(biāo)位姿和當(dāng)前位姿進(jìn)行比較,最后根據(jù)兩者誤差來設(shè)計(jì)反饋控制率。
轉(zhuǎn)向履帶式雙目視覺礦用巡檢機(jī)器人(機(jī)械臂款)使用基于位置的視覺控制系統(tǒng)(PBVS),實(shí)際系統(tǒng)的工作過程如下:利用雙目攝像機(jī)拍攝出機(jī)械臂巡檢環(huán)境的圖片,將其上傳到上位機(jī)進(jìn)行圖片處理,完成對視覺對象的識別定位工作,并利用三角測量原理計(jì)算出視覺對象的三維坐標(biāo),得到的位置信息通過矩陣變換轉(zhuǎn)換成機(jī)
械臂空間下的信息以便執(zhí)行擬人化操作任務(wù),機(jī)器人的位置信息上傳至上位機(jī)處理,下發(fā)控制信號控制轉(zhuǎn)向履帶在不同路面上的行進(jìn)。
最后對創(chuàng)新技術(shù)方案進(jìn)行整理和評價,綜合節(jié)約成本、可靠性、可維護(hù)性、易加工性、創(chuàng)新性等因素,上述技術(shù)方案中最優(yōu)方案為5,較優(yōu)方案為2、3、6、7,方案較差的是1、4,因此本創(chuàng)新創(chuàng)意最終方案確定為方案2、3、5、6、7相結(jié)合的方式。
五、結(jié)語
本文應(yīng)用了功能分析中的組件分析、相互作用分析表、結(jié)果模型圖、結(jié)構(gòu)模型表和功能模型分析,因果鏈分析,最終理想解分析,九屏幕法,資源分析,技術(shù)矛盾,物理矛盾,物場模型分析和技術(shù)系統(tǒng)進(jìn)化分析。
從方案實(shí)施情況及生產(chǎn)效益情況來看,國家近年大力推行智慧礦山,提倡無人化作業(yè),轉(zhuǎn)向履帶式雙目視覺礦用巡檢機(jī)器人(機(jī)械臂款),有效降低人工成本,提高巡檢、管理、日常操作和臨危操作的智能化和無人化水平,提供了新型的識別算法與控制算法,具有巨大的社會效益、經(jīng)濟(jì)效益和安全效益。同時,本創(chuàng)新方案現(xiàn)已有某公司訂單意向,并考慮戰(zhàn)略合作及聯(lián)合研發(fā)生產(chǎn),為公司打開新市場提供了強(qiáng)有力的技術(shù)支撐。
責(zé)編 / 馬銘陽