基于路徑評價模型的自適應軌跡跟蹤控制
2023-12-27 14:53:50許萬,周航
計算機工程與應用 2023年24期
許 萬,周 航
湖北工業(yè)大學 機械工程學院,武漢 430068
移動機器人因其具有機動性能靈活、承載性能優(yōu)越等特點被應用在室內(nèi)建筑施工中的自動化放線領域[1]。其中,軌跡跟蹤控制是移動機器人自主導航過程的關鍵一環(huán),控制器的性能將直接影響行駛精度[2]。
當前,主流控制方法包括:PID 控制、Backstepping控制、模糊控制、滑模控制、自抗擾控制、MPC 控制、神經(jīng)網(wǎng)絡控制等[3]。然而,上述控制器在控制增益的選取、模糊規(guī)則表的確定、論域的設立等方面普遍需要通過人為試湊的方式,存在控制器調(diào)試困難等缺點,同時控制器魯棒性較差,容易受到外界擾動的干擾,并且當外界環(huán)境發(fā)生變化時,控制增益需要進行重新設定[4]。考慮到復雜環(huán)境下的控制需求較為嚴格,采用固定的控制增益難以確保跟蹤精度,文獻[5]提出了一種自適應模糊PID 控制方法,實現(xiàn)了對控制增益的自整定,同時也提高了移動機器人的抗擾能力;文獻[6]利用神經(jīng)網(wǎng)絡非線性建模能力強的特點,將該方法與Backstepping 控制器進行結(jié)合,其中Backstepping 方法能將高階系統(tǒng)進行降階處理,簡化控制模型,提升控制性能,具有較高的響應速度,同時利用神經(jīng)網(wǎng)絡實現(xiàn)控制增益的自適應調(diào)整;文獻[7]提出了一種改進自適應模型預測控制,能有效地建模和控制非線性系統(tǒng),在曲線行駛、圓弧轉(zhuǎn)彎時提供更精確的控制策略;文獻[8]設計了一種自適應滑模控制器,減少了傳統(tǒng)滑模控制的高頻振蕩現(xiàn)象,提高了控制器的平滑性和穩(wěn)定性。考慮到機器人模型不確定會對跟蹤精度產(chǎn)生影響,文獻[9]將移動機器人實際運行中不可避免的車輪磨損、主軸形變、加工誤差、裝配誤差等因素考慮在內(nèi),自適應調(diào)整運動學模型,基于動態(tài)運動學模型設計出的控制器跟蹤精度更高。考慮到動力學對控制器的影響,文獻[10]針對移動機器人在行駛的過程中支撐輪的扭轉(zhuǎn)會對機器人產(chǎn)生擾動,影響軌跡跟蹤性能,進而將該擾動作為前饋輸入設計自適應控制器;文獻[11]針對機器人行駛在顛簸路面、濕滑路面以及松軟路面時車輪會發(fā)生縱向或側(cè)向滑動,設計了一種能夠在未知滑動參數(shù)情況下自動調(diào)整增益的控制器。
綜上所述,采用自適應機制能夠有效地增強軌跡跟蹤的性能。但是,上述研究成果均未考慮路徑曲率對軌跡跟蹤控制的影響。
文獻[12-13]指出,移動機器人的軌跡跟蹤控制會受到路徑信息的影響,尤其是路徑的曲率及曲率變化率這兩個物理量會直接影響機器人的控制精度。在理論跟蹤軌跡彎道較多、曲率變化較大的路況下,移動機器人軌跡跟蹤控制難度顯著提升。文獻[14-15]通過研究人類駕駛員的行車經(jīng)驗,總結(jié)出駕駛技術高超的人類駕駛員會通過綜合分析前方道路彎曲程度與車身目前狀態(tài)之間的關系,提前做出控制決策,從而提升駕駛安全性。基于上述研究成果,為了進一步提高智能移動放線機器人軌跡跟蹤控制精度,借鑒人類駕駛員在控制車輛時會綜合考慮前方道路彎曲程度與汽車位姿的駕駛經(jīng)驗,設計了一種基于路徑評價模型的自適應軌跡跟蹤控制器。首先,建立移動機器人的運動學模型以及位姿誤差模型;其次,建立了路徑評價模型,定義了路徑復雜度的概念,并設計一種路徑評價函數(shù),該函數(shù)能對當前路徑曲率及車輛跟蹤誤差進行量化分析;然后,為了驗證路徑評價模型的可行性,設計了一種自適應Backstepping控制器,將路徑評價函數(shù)的結(jié)果作為BP神經(jīng)網(wǎng)絡的輸入,控制增益作為BP神經(jīng)網(wǎng)絡的輸出,進而實現(xiàn)Backstepping控制器的自適應控制;最后,通過仿真和實驗證明了路徑評價模型能有效提高軌跡跟蹤精度,同時還通過實驗法給出了路徑評價模型中核心參數(shù)的合理取值范圍。
1 移動機器人模型
1.1 運動學模型
以智能移動放線機器人為研究對象,其輪系結(jié)構(gòu)為麥克納姆輪,假設移動機器人在行駛過程中車輪與地面間不發(fā)生打滑現(xiàn)象,麥克納姆輪各輥子主軸線與車輪主軸線呈45°夾角,構(gòu)建如圖1所示的運動學模型。
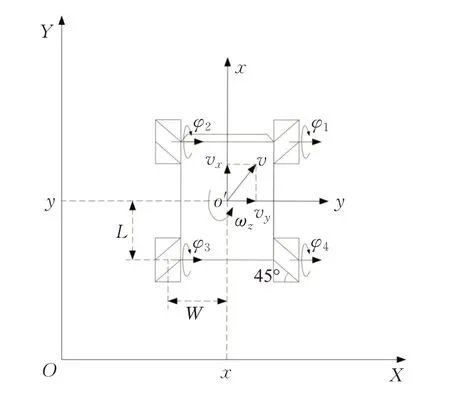
圖1 運動學模型Fig.1 Kinematic model
圖1中,XOY為全局坐標系,xo′y為局部坐標系,o′為移動機器人底盤的幾何中心,坐標(x,y)為機器人的全局位置,vx、vy為機器人線速度v在局部坐標系xo′y中的速度分量,ωz為機器人角速度,φ為車輪轉(zhuǎn)速,W和L分別為車輪軸線中點到底盤幾何中心的水平和垂直間距,R為車輪的最大半徑,其運動學方程可表示為[16]:
1.2 位姿誤差模型
位姿誤差模型如圖2所示,在全局坐標系XOY中,定義Q=[x y θ]T為機器人的真實位姿向量;Qr=[xr yr θr]T為機器人的參考位姿向量;D=[Xe Ye θe]T為全局位姿誤差變量;d=[xe ye θe]T為局部位姿誤差變量。
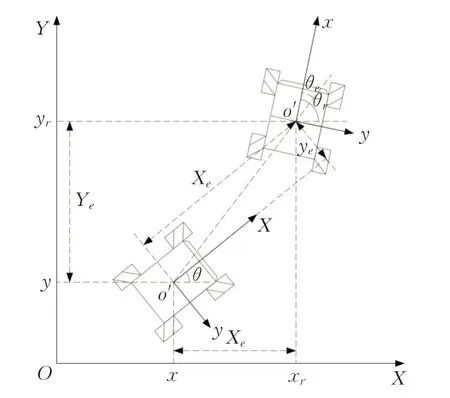
圖2 位姿誤差模型Fig.2 Pose error model
圖2中,x、y、θ分別為機器人的全局實際坐標值及車身橫擺角度,xr、yr、θr分別為機器人的全局參考坐標值及車身橫擺角度,移動機器人底盤的幾何中心與參考軌跡上目標點之間的位姿誤差為:
對式(2)微分得:
其中,實際點上的速度與角速度分別描述為v和ω;參考點上的速度與角速度分別描述為vr和ωr。
2 路徑評價函數(shù)
在傳統(tǒng)控制器的設計過程中,通常將當前時刻下的位姿誤差信息作為控制器的輸入,從而控制機器人抵達目標點。但是該方法未考慮路徑曲率對跟蹤控制的影響,當路徑的復雜度較高時,控制難度將顯著增大。
為了描述移動機器人實際位姿與理論跟蹤軌跡之間的關系,建立如圖3 所示的路徑評價模型,其中實線為“理論跟蹤軌跡”,虛線為“實時規(guī)劃路徑”。該模型在描述移動機器人跟蹤位姿誤差的同時,直觀反映了移動機器人與理論跟蹤軌跡之間的幾何關系。
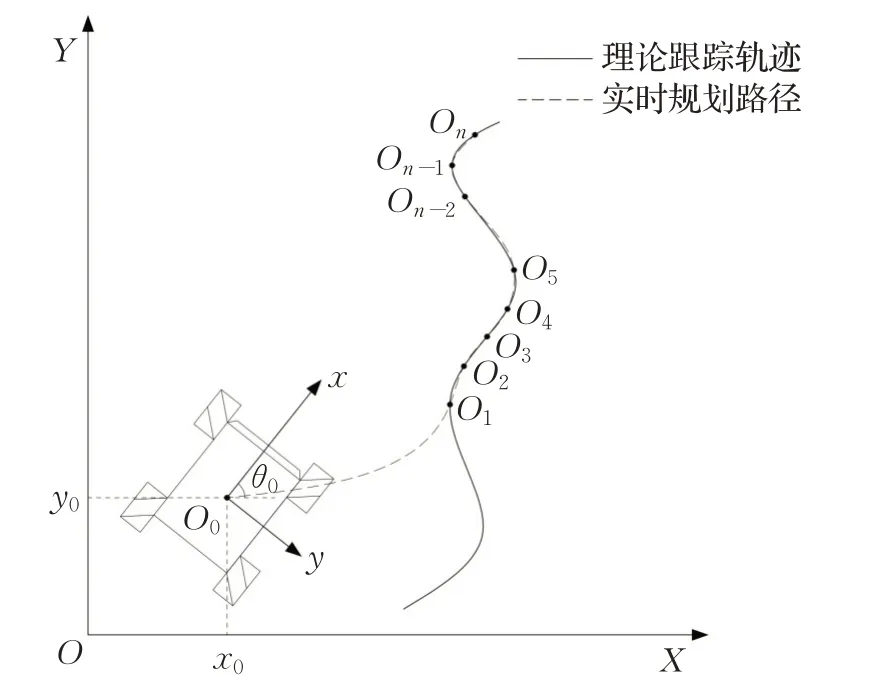
圖3 路徑評價模型Fig.3 Trajectory evaluation model
圖3中,點O0(x0,y0,θ0)為底盤的幾何中心,并且為當前時刻T下的實際位姿點;Oi(xi,yi,θi)(i∈(1,n))為理論跟蹤軌跡上的離散參考點,且O1(x1,y1,θ1)為當前時刻T下的理論位姿點。
圖3 所示的理論跟蹤軌跡是一條與時間相關的曲線,在實際應用中通常將理論軌跡進行離散化處理,從而演變?yōu)閷⒖茧x散點進行跟蹤的問題。假設離散化間隔時間為Δt,則Oi(xi,yi,θi)(i∈(1,n))為T+(i-1)Δt(i∈(1,n))時刻下的理論位姿點。
將由點O0(x0,y0,θ0)及點Oi(xi,yi,θi)(i∈(1,n))連接而成的曲線定義為實時規(guī)劃路徑E,同時定義與實時規(guī)劃路徑重合的離散參考點為“路況特征點”,其數(shù)量為n。實時規(guī)劃路徑E包含有當前時刻T下,O0(x0,y0,θ0)與O1(x1,y1,θ1)之間的位姿誤差信息,以及未來時刻理論跟蹤軌跡的曲率和曲率變化率信息。
2.1 路徑評價函數(shù)的設計
根據(jù)文獻[12-13]描述,移動機器人當前的位姿誤差以及理論跟蹤軌跡的曲率及曲率變化率信息會直接影響控制的效果。如圖3所示,當前時刻T下O0與O1之間的位姿誤差D能夠直接描述位姿偏差情況,理論跟蹤軌跡的曲率及曲率變化率信息能夠量化反映道路的彎曲程度及變化程度。
因此,從路徑曲率和車輛跟蹤誤差的角度入手,基于曲率因素及位姿誤差因素設計了一種路徑評價函數(shù),能對實時規(guī)劃路徑E進行定量分析,具體描述如下:
式(4)描述了路況特征點Oi處的路徑評價情況。其中,η(η∈(0,1))為評價函數(shù)的權(quán)值系數(shù),權(quán)值系數(shù)的選取將直接影響評價函數(shù)的輸出值,為此實驗部分將定性分析權(quán)值系數(shù)的選取依據(jù)。針對實時規(guī)劃路徑E的路徑評價函數(shù)運行流程如圖4所示。

圖4 路徑評價函數(shù)運行流程Fig.4 Flowchart of trajectory evaluation function operation
圖4中,評價函數(shù)f(i)可以系統(tǒng)且直觀地反映了路徑曲率froad(i)和車輛跟蹤誤差fvehicle(i)信息,為后文自適應控制器的設計提供了控制輸入。其中,froad(i)及fvehicle(i)分別代表曲率因素以及位姿誤差因素,具體描述如下。
2.2 路徑曲率因素
圖3中,剔除O0點,路況特征點O1至On處的曲率及其變化率可以描述未來(n-1)Δt時間內(nèi)理論跟蹤軌跡的復雜度。為了量化分析未來(n-1)Δt時間內(nèi)的路徑彎曲程度,引入曲率Ρ以及曲率變化率Ρ′。假設理論跟蹤軌跡上一共有m個離散點,路況特征點i處歸一化處理后的曲率值和曲率變化率的值ρ(i)和ρ′(i)分別表示如下:
歸一化處理后的數(shù)值能夠保證曲率及其變化率數(shù)量級的一致,在點Oi處,未來(n-1)Δt時間內(nèi)Oi至Oi+n-1段的路徑復雜度可以定義如下:
路況特征點Oi處的未來路徑曲率評價函數(shù)如下:
2.3 位姿誤差因素
圖3中,O0O1段描述了移動機器人的位姿誤差,為了量化分析當前時刻T下點O1處的誤差大小,引入跟蹤誤差dline和橫擺誤差dangle,表示如下:
路況特征點Oi處的當前車輛跟蹤誤差評價函數(shù)如下:
3 基于路徑評價模型的控制器設計
為了驗證上文中路徑評價模型的可行性以及路徑評價函數(shù)的準確性,并進一步討論引入上述機制能否提高移動機器人的跟蹤精度,為此設計了一種基于路徑評價模型的控制器,該控制器由兩部分組成:Backstepping運動學控制器、BP 神經(jīng)網(wǎng)絡增益自整定控制器。控制器系統(tǒng)結(jié)構(gòu)如圖5所示。
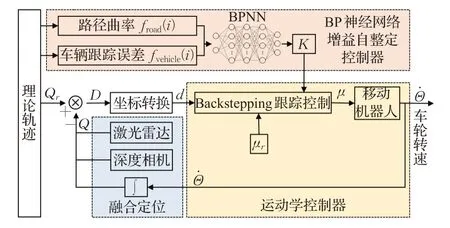
圖5 TEMC系統(tǒng)結(jié)構(gòu)Fig.5 TEMC system structure
其中,運動學控制器是以移動機器人當前時刻T下,實際位姿Q與參考位姿Qr之間的誤差d以及期望速度μr作為輸入,以速度μ作為輸出,經(jīng)過運動學逆解,控制四輪轉(zhuǎn)速=[φ1φ2φ3φ4]T,從而使控制增益自整定控制器是基于BP 神經(jīng)網(wǎng)絡,以路徑評價函數(shù)的值froad(i)和fvehicle(i)作為輸入,以運動學控制器的增益K作為輸出,從而實現(xiàn)自適應Backstepping控制。
3.1 Backstepping運動學控制器
基于1.1 節(jié)所建立的運動學模型及位姿誤差模型,設計軌跡跟蹤控制器如下:
當xe→0 時,將xe作為虛擬控制輸入,取部分Lyapunov函數(shù)為:
對式(13)求導可得:
取虛擬控制輸入xe的虛擬反饋為:
其中,k1為大于0的常數(shù),f(ω)=sin(arctanω)。
將式(15)代入式(14)可得:
其中,ωsin(arctanω)在其定義域內(nèi)恒為非負常數(shù),從而可得≤0。V1正定,負定,由Lyapunov相關理論可知,在t→+∞時,ye是漸進穩(wěn)定的。
對式(17)求導可得:
綜上,設計控制器的核心是在輸入量[v,ω]的作用下,在t→+∞時:xe=k1sin(arctanω)ye。據(jù)此,構(gòu)造全局Lyapunov函數(shù)為:
對式(19)求導可得:
將式(18)代入式(20)得:
根據(jù)式(21)所設計的控制率為:
其中,k1、k2、k3為任意的正常數(shù),分別對xe、ye、θe進行調(diào)節(jié)。
3.2 BP神經(jīng)網(wǎng)絡增益自整定控制器
式(4)所描述的路徑評價函數(shù)f(i)可以量化路徑曲率和車輛跟蹤誤差信息,也即“路徑復雜度”和“位姿誤差”信息。由式(22)可知,控制器中的三個增益參數(shù)k1、k2、k3會直接影響控制效果。當系統(tǒng)的跟蹤誤差發(fā)生變化,以及跟蹤不同復雜度的理論軌跡時,原始控制增益K是無法保證較好的跟蹤精度。
為此,綜合考慮理論軌跡復雜度和位姿誤差這兩個輸入信息,基于BP神經(jīng)網(wǎng)絡實現(xiàn)對控制增益K的自整定,從而提高控制器跟蹤復雜路徑時的跟蹤精度與穩(wěn)定性。所設計的BP神經(jīng)網(wǎng)絡模型輸入?yún)?shù)為froad(i)和fvehicle(i),輸出為控制增益K。
神經(jīng)網(wǎng)絡的輸出層和各隱藏層激活函數(shù)都為Relu函數(shù):
取性能指標函數(shù)為:
利用梯度下降法修正BP 神經(jīng)網(wǎng)絡的權(quán)系數(shù),基于BP神經(jīng)網(wǎng)絡控制增益自整定控制器運行流程如下:
(1)建立網(wǎng)絡模型,其中隱藏層為3層,每層神經(jīng)元為20個,并對各層權(quán)系數(shù)賦初始值。
(2)計算當前時刻“froad(i)”和“fvehicle(i)”。
(3)將路徑評價函數(shù)f(i)的值作為BP 神經(jīng)網(wǎng)絡的輸入,更新網(wǎng)絡中各層參數(shù)的計算值,其中輸出即為Backstepping控制器的增益K。
(4)根據(jù)式(22)計算輸出速度。
(5)進行神經(jīng)網(wǎng)絡學習,不斷調(diào)整權(quán)系數(shù),將損失函數(shù)值梯度下降到局部最優(yōu)解,從而實現(xiàn)對Backstepping控制器增益的自適應調(diào)節(jié)。
(6)返回第(2)步。
3.3 穩(wěn)定性分析
定理1移動機器人在Backstepping運動學控制器、BP 神經(jīng)網(wǎng)絡增益自整定控制器的共同作用下,所設計的TEMC控制系統(tǒng)是漸進穩(wěn)定的。
證明對于式(19)所描述的全局Lyapunov 函數(shù),可以看出V2≥0,當且僅當(,ye,θe)T=0 時,V2=0。將所設計的控制率式(22)代入式(21)中得:
綜上,在控制率式(22)及自整定控制增益K的作用下,位姿誤差d=[xe ye θe]T是漸進穩(wěn)定的,能達到的目的,即能在有限時間內(nèi)控制機器人收斂于期望軌跡。
4 仿真與實驗
為了驗證移動機器人在室內(nèi)建筑施工中的有效性以及上述路徑評價模型和路徑評價函數(shù)的可行性,實驗采用分段函數(shù)和雙扭線作為參考軌跡,取跟蹤誤差和橫擺誤差θe來分析控制器的性能,并與傳統(tǒng)反演法控制器(TIC)[17]及自適應反演法控制器(AIC)[18]進行對比,同時采用誤差的均方根Xrms(Le)、Xrms(θe)和最大誤差Emax(Le)、Emax(θe)來評估各個控制器的性能。實驗中,移動機器人底盤的長L=0.183 m、寬W=0.132 m、車輪半徑R=0.037 5 m,取離散化采樣時間間隔Δt=0.01 s,考慮到移動機器人主要工作在室內(nèi)低速場景,在實驗中采用恒定且較低的期望速度μr=0.5 m/s。
4.1 仿真實驗
在仿真實驗中,TEMC 控制器的各個參數(shù)選取如表1所示。

表1 TEMC參數(shù)選取(仿真)Table 1 TEMC parameter selection(simulation)
4.1.1 軌跡跟蹤實驗
實驗1分段軌跡跟蹤實驗:采用直線Xd=-2π 與正弦曲線Xd=t,Yd=-5 sin(t/2)的組合作為參考軌跡。參考軌跡的初始位姿為Q=[-2π-13 π/2]T,實際起始位姿為Qr=[-2π-1-14 3π/20]T。同時,用于路徑復雜度評價的路況特征點數(shù)量n=30。實驗結(jié)果如圖6所示,實驗數(shù)據(jù)如表2所示。
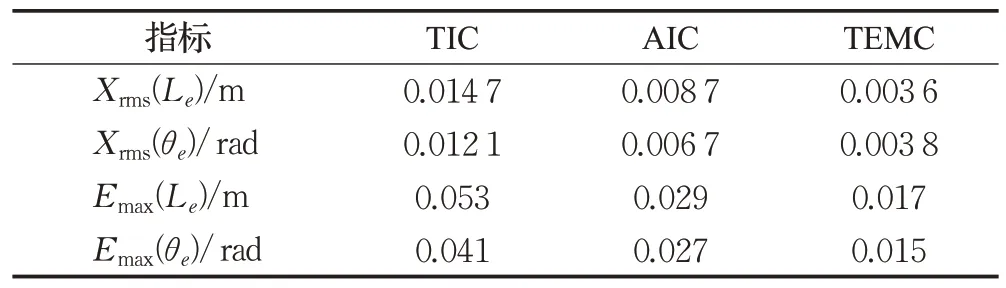
表2 分段軌跡評價指標(仿真)Table 2 Segmented trajectory evaluation index(simulation)
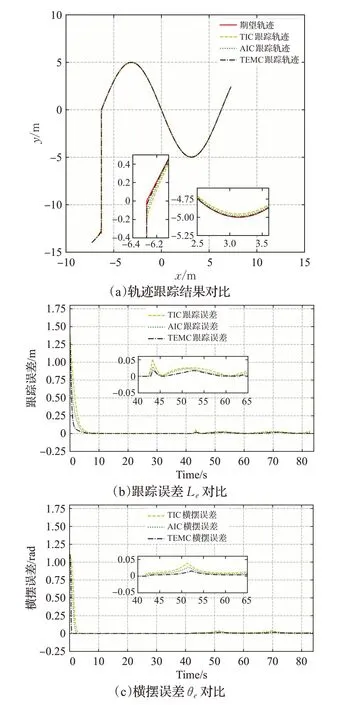
圖6 分段軌跡結(jié)果對比(仿真)Fig.6 Comparison of segmented trajectory results(simulation)
實驗1 結(jié)果分析:在參考軌跡中,直線軌跡和正弦軌跡的銜接處存在路徑曲率及曲率變化率突變的情況。在銜接處,TIC和AIC的跟蹤曲線出現(xiàn)了明顯的跟蹤誤差,而TEMC 在曲線銜接處能快速適應,其跟蹤曲線無劇烈波動且響應速度高。在正弦軌跡的上凹處,參考軌跡曲率發(fā)生了快速波動,TIC和AIC出現(xiàn)了沒有跟蹤上的情況,軌跡跟蹤誤差較大,而TEMC 跟蹤效果良好。實驗1驗證了上文所提出路徑評價機制的可行性,將路徑評價模型引入到軌跡跟蹤控制器中能有效地提高跟蹤精度,同時能夠適應曲率變化率突變的路況,在曲率波動較大的軌跡上也能快速且準確地跟蹤。
實驗2雙扭線軌跡跟蹤實驗。采用雙扭線作為參考軌跡,其表達式為Xd=5 cos(πt/15),Yd=-5 sin(2πt/15)。參考軌跡的初始位姿為Q=[5 0 π/2]T,實際起始位姿為Qr=[-3-1 3π/20]T。同時,用于路徑復雜度評價的路況特征點數(shù)量n=30。實驗結(jié)果如圖7 所示,實驗數(shù)據(jù)如表3所示。

表3 雙扭線軌跡評價指標(仿真)Table 3 Double helix trajectory evaluation index(simulation)
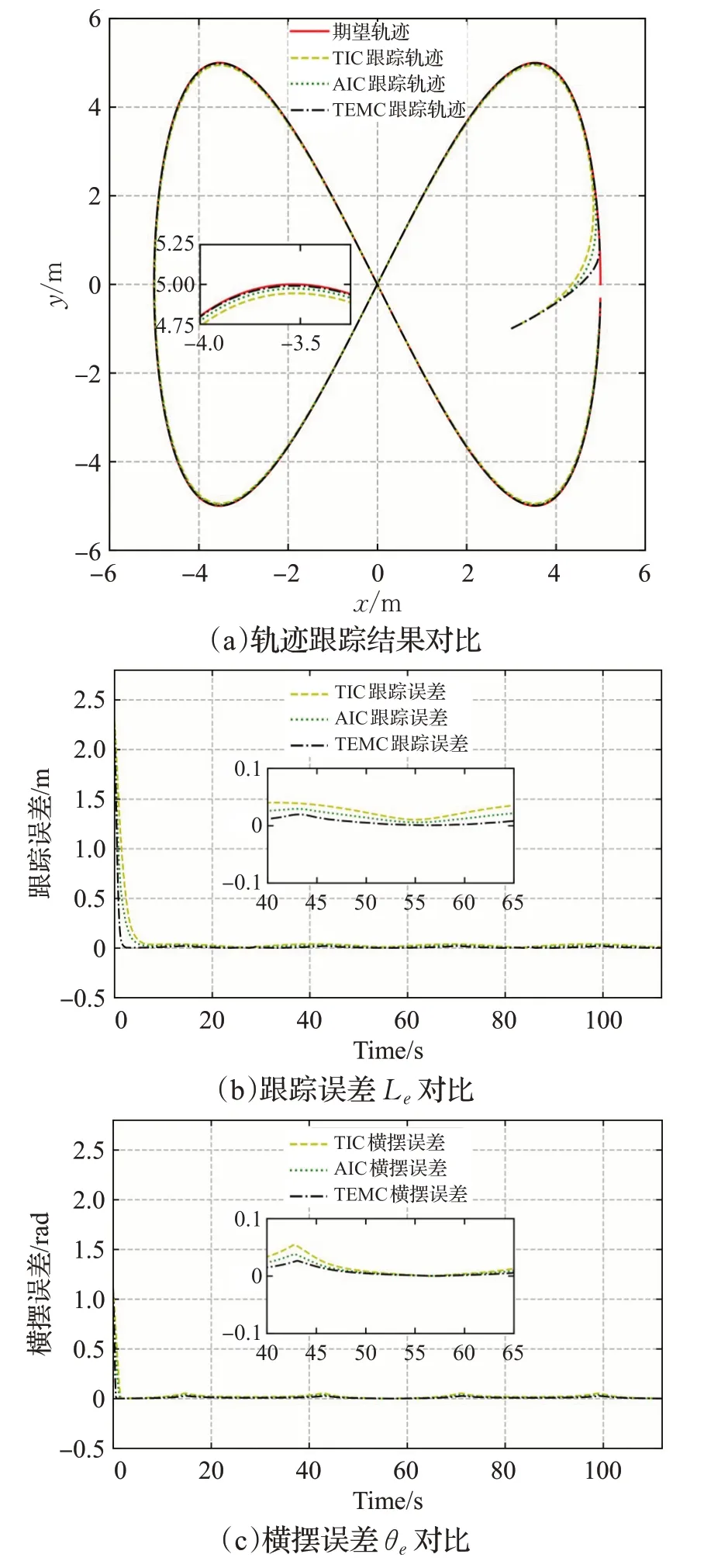
圖7 雙扭線實驗結(jié)果對比(仿真)Fig.7 Comparison of double helix trajectory results(simulation)
實驗2結(jié)果分析:參考軌跡雙扭線上的曲率及其變化率波動更加明顯,也能更好地測試各控制器的跟蹤性能。在起始位姿誤差存在的情況下,TEMC控制器的收斂速度要快于TIC 和AIC 控制器。由于TEMC 控制器引入了路徑評價機制,對于理論軌跡曲率變化較大的路段,TEMC 控制器能進行快速穩(wěn)定地跟蹤,且跟蹤誤差無明顯震蕩現(xiàn)象。而TIC 和AIC 控制器主要考慮自身的位姿誤差,無法對理論軌跡的復雜度進行分析,對于曲率及其變化率波動較大的路段不能進行較好地跟蹤,跟蹤誤差較大。實驗2 進一步論證了針對復雜軌跡的跟蹤,考慮未來路徑曲率對控制決策的影響,將有效提高移動機器人的跟蹤精度。
4.1.2 路徑評價函數(shù)權(quán)值系數(shù)η 選取實驗
由人類駕駛員駕駛汽車的經(jīng)驗可知,如何操控汽車平穩(wěn)地駕駛?cè)Q于前方道路的彎曲程度,例如當汽車行駛在崎嶇的道路上時,通常需要提前調(diào)整汽車的位姿,以便順利地切入每一個急彎。同時由式(4)以及TEMC系統(tǒng)結(jié)構(gòu)可知,權(quán)值系數(shù)η的選取將直接影響路徑評價函數(shù)對路徑曲率froad(i)及車輛跟蹤誤差fvehicle(i)重要性評估的側(cè)重點,從而間接影響軌跡跟蹤的性能。針對不同的應用場景如何選取合適的權(quán)值系數(shù),將通過對比實驗進行說明。
為了初步評估整體理論跟蹤軌跡,在式(5)及式(6)的基礎上,定義整體路徑復雜度的概念,表示如下:
實驗3分別采用上文中的分段軌跡和雙扭線軌跡作為實驗對象,其中分段軌跡的整體路徑復雜度Ψsegment=0.602 3,雙扭線軌跡的整體路徑復雜度Ψtwist=0.828 2,實驗過程中通過調(diào)整權(quán)值系數(shù)η的取值,觀察誤差值,找出權(quán)值系數(shù)η與整體路徑復雜度Ψ之間的關系。實驗結(jié)果如圖8、圖9所示,實驗數(shù)據(jù)如表4、表5所示。
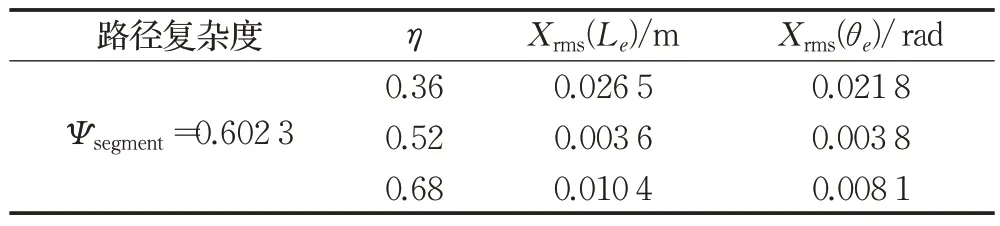
表4 分段軌跡評價指標(仿真)Table 4 Segmented trajectory evaluation index(simulation)
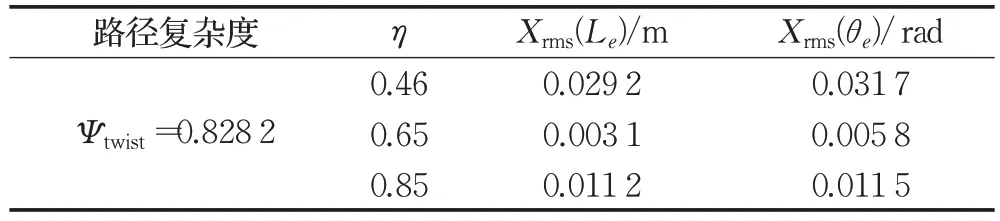
表5 雙扭線軌跡評價指標(仿真)Table 5 Double helix trajectory evaluation index(simulation)

圖8 分段軌跡η 的敏感性分析(仿真)Fig.8 Sensitivity analysis of segmented trajectory η(simulation)
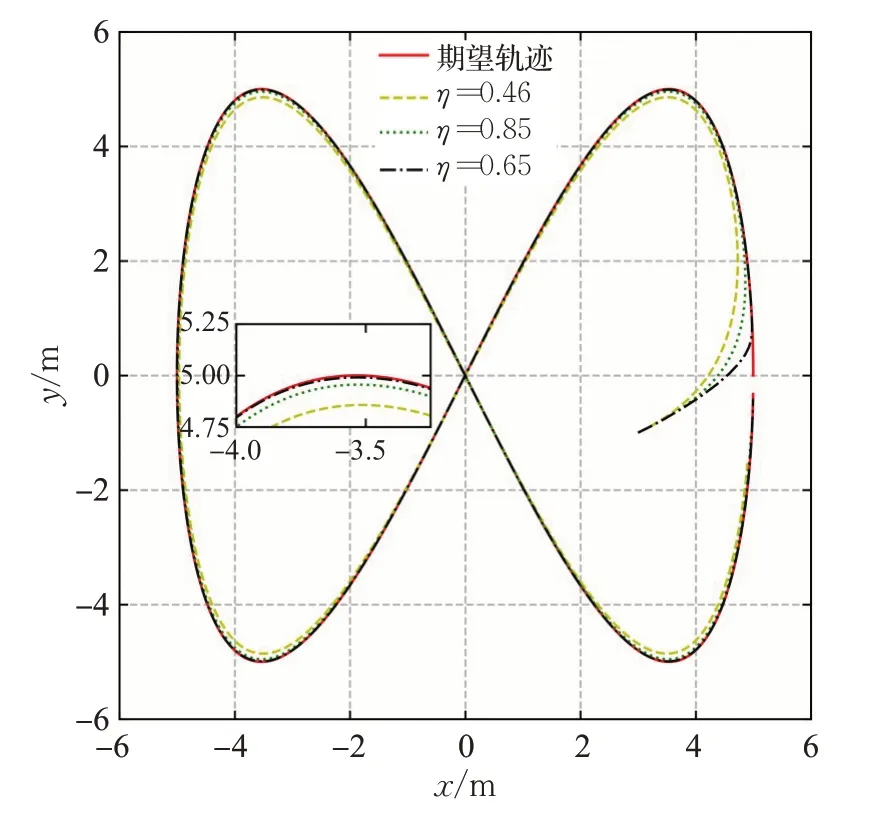
圖9 雙扭線軌跡η 的敏感性分析(仿真)Fig.9 Sensitivity analysis of double helix trajectory η(simulation)
實驗3結(jié)果分析:首先通過大量的對比實驗找出了對應于兩段不同復雜度軌跡的最優(yōu)η值,分別為η=0.52和η=0.65。在此基礎上,分別將η值增大和縮小30%。實驗結(jié)果表明,針對同一軌跡在一定范圍內(nèi),η值越大跟蹤效果越好,但η值過大將降低車輛跟蹤誤差fvehicle(i)的權(quán)重,從而導致跟蹤誤差增大的情況。經(jīng)過實驗分析,η的取值不宜大于70%,并且針對整體路徑復雜度不同的情況,復雜度越大,η的取值越大。
4.2 實物實驗
為了進一步分析上述路徑評價模型和路徑評價函數(shù)的可行性,將上述控制方法應用于自主搭建的麥克納姆輪移動機器人中。其上位機基于ROS 操作系統(tǒng)開發(fā),運行在Ubuntu 18.04 上,核心算法功能包均采用C++/Python 進行編寫,下位機核心代碼基于C 語言開發(fā)。機器人系統(tǒng)框架如圖10所示。

圖10 機器人系統(tǒng)框架Fig.10 Robot system framework
其中,底盤運動控制板為基于STM32的驅(qū)動板,集成了4 路直流電機驅(qū)動、MPU9250 陀螺儀、藍牙以及OLED 等模塊,同時可以實現(xiàn)串口和CAN 通信。ROS平臺運行在Raspberry_Pi 4B 上,主要承擔著激光雷達信息的處理、軌跡跟蹤控制器的運行以及與STM32 控制命令的交互。實物機器人的具體結(jié)構(gòu)如圖11 所示,控制器的各個參數(shù)選取如表6所示。

表6 TEMC參數(shù)選取(實驗)Table 6 TEMC parameter selection(experiment)
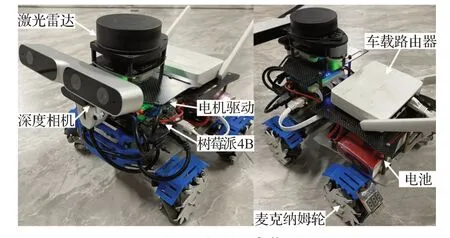
圖11 機器人實物圖Fig.11 Actual diagram of robot
實驗結(jié)果分析:從圖12以及表7的實驗結(jié)果可以看出,針對雙扭線這類跟蹤軌跡曲率及曲率變化率較大的參考軌跡,基于路徑評價模型設計的TEMC控制器跟蹤效果明顯優(yōu)于TIC和AIC控制器。同時,實物實驗也進一步證明了前文所設計的路徑評價模型的可行性與先進性,論證了考慮未來路徑信息對控制決策的影響將有效提升移動機器人跟蹤精度,且機器人跟蹤精度滿足建筑施工的作業(yè)要求。
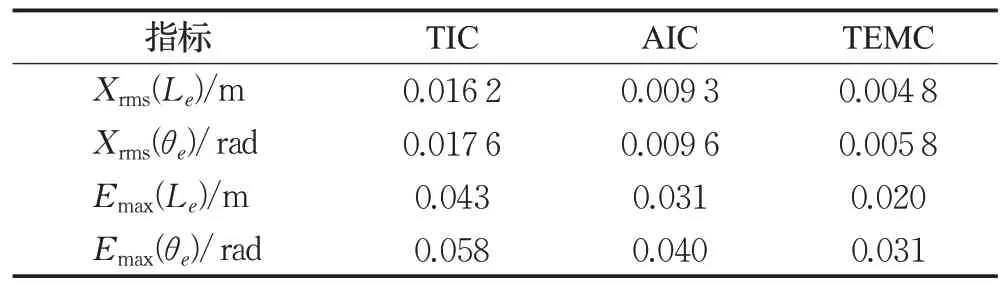
表7 雙扭線軌跡評價指標(實驗)Table 7 Double helix trajectory evaluation index(experiment)
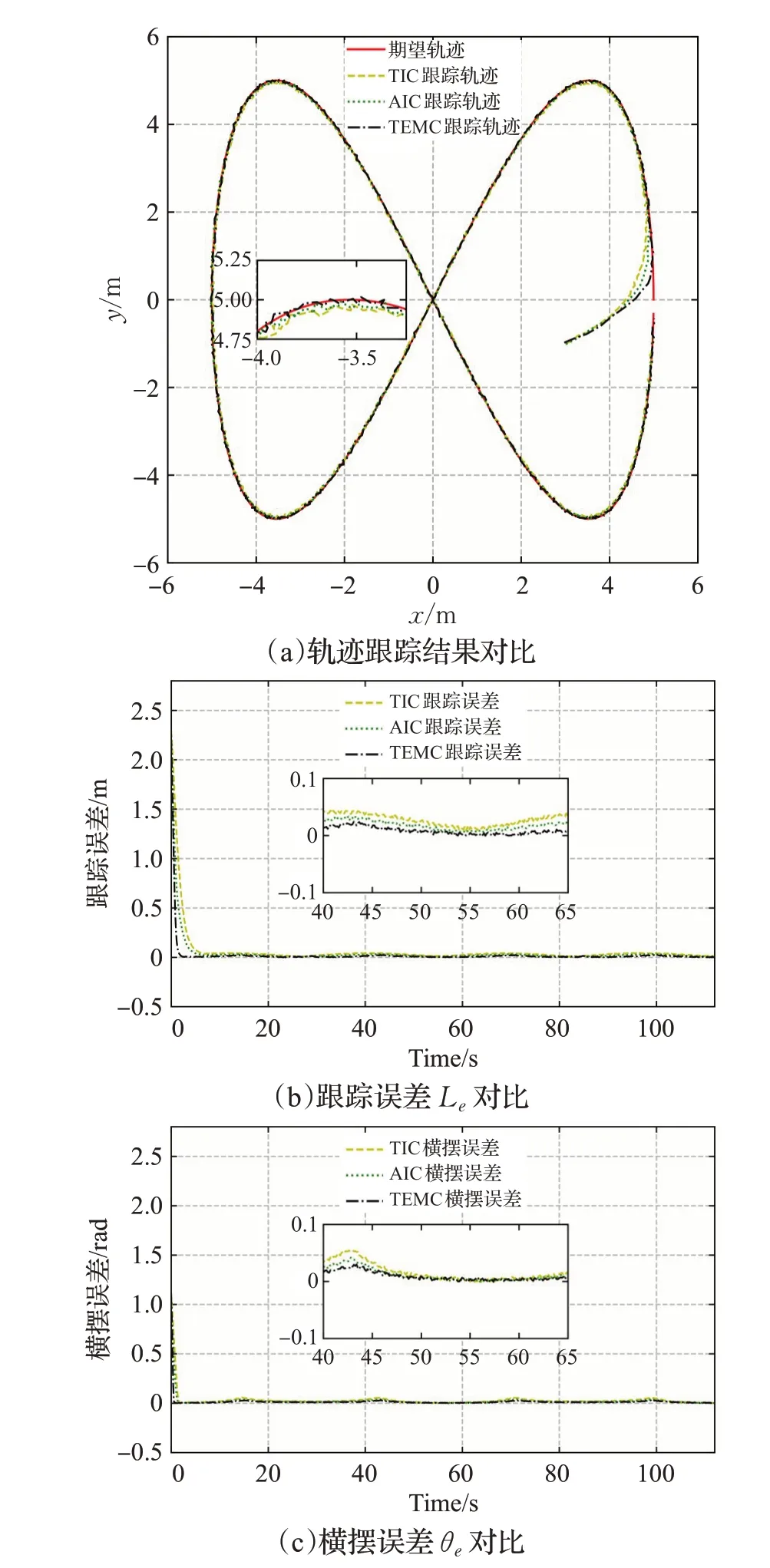
圖12 雙扭線實驗結(jié)果對比(實驗)Fig.12 Comparison of double helix trajectory experimental results(experiment)
5 結(jié)論
針對現(xiàn)有軌跡跟蹤控制器主要考慮自身的位姿誤差,未考慮路徑曲率對跟蹤控制的影響,將路徑曲率引入到軌跡跟蹤控制當中,提出了一種基于路徑評價模型的跟蹤控制方法。首先,針對機器人運動學模型和位姿誤差模型進行分析;其次,建立了一種路徑評價模型,并提出了一種路徑評價函數(shù),該函數(shù)能對未來一定時間內(nèi)的路徑曲率和車輛跟蹤誤差進行綜合分析;然后,為了驗證上述路徑評價模型的可行性,基于Backstepping 方法設計了一種參數(shù)自整定控制器,并證明了該控制器是漸近穩(wěn)定的;然后,通過實驗法給出了路徑評價模型中關鍵參數(shù)的合理取值范圍;最后,通過仿真及實物實驗進一步論證了未來路徑曲率會對控制決策產(chǎn)生影響,將路徑評價模型引入到控制系統(tǒng)中能有效提高軌跡跟蹤的精度。在實物對比實驗中,TEMC控制方法與其他前饋控制器相比,軌跡跟蹤精度提升了48%以上。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
石油瀝青(2021年4期)2021-10-14 08:50:44
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
制造技術與機床(2017年3期)2017-06-23 08:11:21
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19