GNSS 移動基站技術在水運工程中的應用
2023-12-27 17:19:58汪波吳彬
中國港灣建設 2023年12期
關鍵詞:方向
汪波,吳彬
(上海達華測繪科技有限公司,上海 201208)
0 引言
水運工程中施工車輛及船舶對實時動態定位的精度要求較高,主要采用RTK 和星站差分等定位方式[1]。RTK 定位的基站一般固定架設在近岸,受限于差分信號傳播距離,其使用范圍較小;星站差分無需架設基站,不受離岸距離限制,廣泛應用于水運工程建設領域[2-3]。典型的星站差分服務有Navcom 公司的StarFire、Fugro 公司的StarFix、Hexagon 公司的TerraStar、天寶公司的OmniSTAR和RTX 等,我國合眾思壯研發的星站差分服務“中國精度”打破了國外技術壟斷,提供最高精度優于4 cm RMS[4-5]。星站差分操作方便,但服務費用昂貴,特別是水運工程中多輛施工車和多艘施工船舶集群作業時,若每輛車和每艘船均開通星站差分服務,單個工程區的總體服務費較高。
GNSS 移動基站通過接收GNSS 信號和L-Band等通信衛星播發的星站差分改正數,實時進行星站差分定位,獲得全球參考框架下的絕對坐標[6-7];同時,GNSS 移動基站通過外掛電臺及時向外廣播其GNSS 觀測值和絕對坐標等RTK 差分數據。在移動基站附近作業的流動站,通過接收GNSS 信號和移動基站播發的差分數據以進行RTK 定位[8]。GNSS 移動基站同時作為星站差分流動站和RTK基站,融合了星站差分和RTK 定位方式,其基本原理如圖1,將其應用于水運工程中的實際效果有待研究。結合水運工程環境特點,設計針對性試驗,充分評估GNSS 移動基站應用于水運工程中的RTK 流動站定位精度及定位定向穩定性。
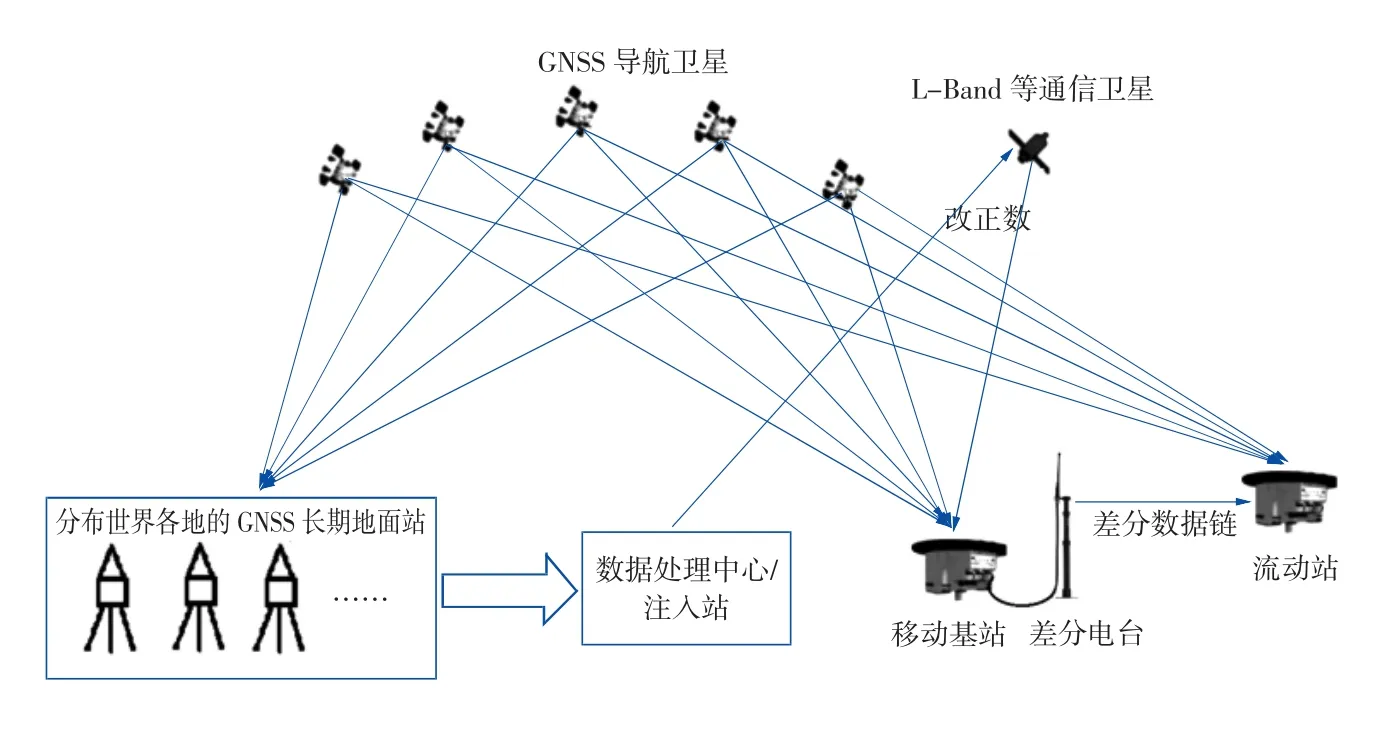
圖1 GNSS 移動基站技術應用于水運工程的基本原理Fig.1 Basic principle of GNSS mobile base station technology applied in port and waterway engineering
1 試驗設計
試驗場景選擇:選取長江口區域的水運工程建設項目,位于上海橫沙島東部海陸連接區域,臨近長江深水航道,具有典型的水運工程環境特征;工程區附近具有1 個CORS 站,可作為位置基準,供參考數據處理使用。
試驗距離限制:考慮移動基站播發的RTK 信號覆蓋范圍有限,移動基站與RTK 流動站之間最遠相對距離設定在20 km 左右。
承載方式:選擇機動性更強的車載運動模式,車速穩定控制在20~30 km/h,模擬船舶航行速度;運動路徑選擇地勢開闊路段,避開大功率電磁設備、高壓線、建筑遮擋物等。移動基站與流動站天線架設高度均保持在2 m 左右。
實時動態模式:結合實際應用場景中的運動情況,測試移動基站與流動站同步運動、移動基站靜止與流動站運動、移動基站運動和流動站靜止等3 種模式下的流動站定位狀態。
試驗數據記錄:共使用A、B、C 三臺GNSS接收機。設定接收機A 為移動基站,進行星站差分定位并向外播發RTK 差分數據;設定接收機B和接收機C 為RTK 流動站;移動基站A、流動站B、流動站C 同步記錄1 s 采樣率的GNSS 靜態數據并實時輸出1 Hz NEMA-0183GGA 格式的RTK結果。
試驗數據處理:以工程區附近的CORS 站為參考站,處理流動站B、C 記錄的靜態數據,計算其1 s 采樣率的PPK 結果;將流動站B、C 的PPK 結果和NEMA-0183GGA 格式的RTK 結果進行投影變換,通過橫軸墨卡托投影(中央子午線123°)轉換為N、E、H 格式。
精度統計及評定:將單臺流動站(B)的RTK結果與PPK 結果作差處理,統計其北方向偏差為ΔN、東方向偏差為ΔE、高程方向偏差為ΔH,分析三維方向收斂時間和收斂后的穩定性;統計收斂后20 min 內的固定解三維方向偏差均方根(RMS)以評定精度。
零基線測試與統計:分析2 臺RTK 流動站(B和C)的定向精度,采用功分器分流同一GNSS 接收機天線信號,兩站基線理論長度為0 m;對2個流動站同步定位結果作差處理,統計同步定位偏差以分析2 個流動站零基線穩定性。
2 流動站實時動態定位性能分析
2.1 流動站實時動態定位分析
統計單臺RTK 流動站的實時動態定位中的N、E、H 等方向的偏差并繪圖分析。
2.1.1 移動基站-流動站同步運動模式
圖2 為移動基站運動時流動站的動態定位情況,N、E 方向開始定位持續約2.5 min 趨向收斂,N 方向收斂后偏差基本保持在4 cm 內浮動,N 方向收斂后偏差RMS 為0.9 cm;E 方向收斂后偏差基本保持在6 cm 內浮動,收斂后E 方向偏差RMS 為1.0 cm;H 方向開始定位持續約3.5 min 趨向收斂,H 方向收斂后偏差基本保持在15 cm 內浮動,H 方向收斂后偏差RMS 為2.7 cm。流動站收斂后出現5 處無定位解。
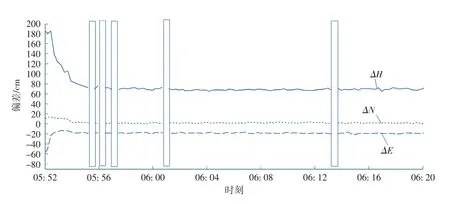
圖2 移動基站運動時流動站動態定位Fig.2 The dynamic positioning of rover station when mobile base station is kinetic
2.1.2 移動基站靜止-流動站運動模式
圖3 為移動基站靜止時流動站動態定位情況,N 方向開始定位持續約3 min 趨向收斂,N 方向收斂后偏差基本保持在5 cm 內浮動,N 方向收斂后偏差RMS 為0.4 cm;E 方向開始定位持續約2 min趨向收斂,E 方向收斂后偏差基本保持在5 cm 內浮動,E 方向收斂后偏差RMS 為0.8 cm;H 方向開始定位持續約3 min 趨向收斂,H 方向收斂后偏差基本保持在15 cm 內浮動,H 方向收斂后偏差RMS 為2.5cm。流動站收斂后出現1 處無定位解。

圖3 移動基站靜止時流動站動態定位Fig.3 The dynamic positioning of rover station when mobile base station is static
2.1.3 移動基站運動-流動站靜止模式
圖4 為移動基站運動時流動站靜止定位情況,N、E、H 方向開始定位持續約2 min 趨向收斂,N、E 方向收斂后偏差均基本保持在6 cm 內浮動,N、E 方向收斂后偏差RMS 均為1.0 cm;H 方向收斂后偏差基本保持在15 cm 內浮動,H 方向收斂后偏差RMS 為2.0 cm。
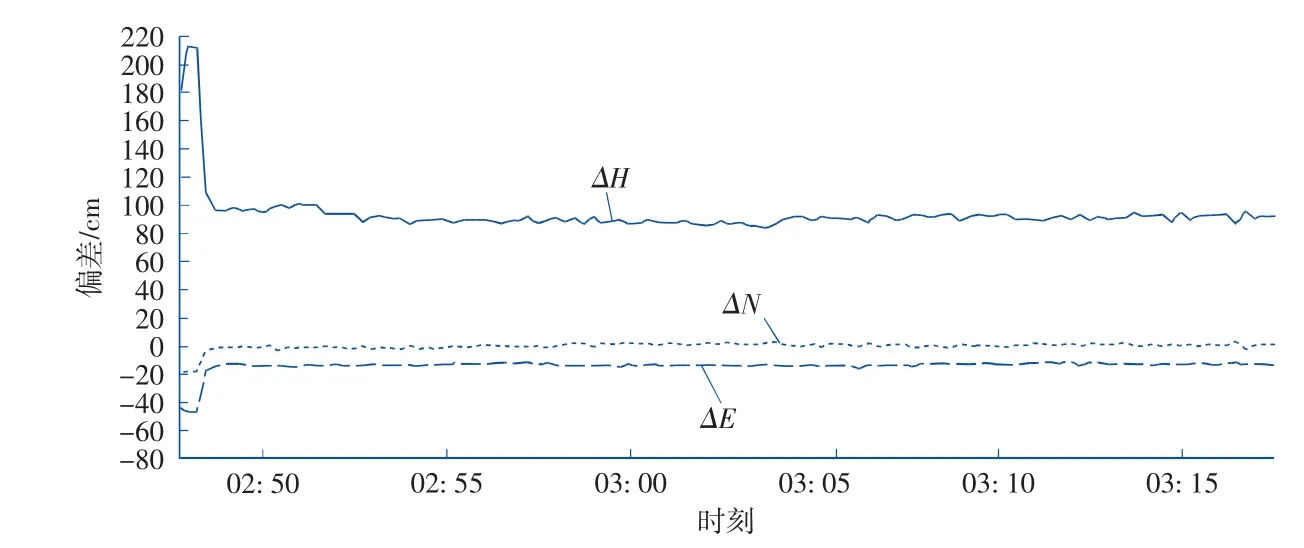
圖4 移動基站運動時流動站靜止定位Fig.4 The static positioning of rover station when mobile base station is kinetic
基于實時星站差分定位的移動基站播發RTK差分信號,RTK 流動站定位與同步PPK 定位存在近似系統偏差,考慮為參考框架及參考歷元不同所致。RTK 流動站的N、E 方向3 min 內可實現收斂,收斂后基本保持在5 cm 內浮動,N、E 方向收斂后偏差RMS 不超過1.0 cm;H 方向4 min 內可實現收斂,收斂后基本保持在15 cm 內浮動,H方向收斂后偏差RMS 不超過3.0 cm。
2.2 流動站實時動態定位影響因素
針對移動基站-流動站同步運動、移動基站靜止-流動站運動兩種模式下出現的無定位解現象,考慮距離與高差等變化因素對電磁波傳播路徑的影響,分析移動基站與流動站相對距離、相對高差等變化與流動站動態定位狀態的相關性,采用PPK 結果計算相對距離與相對高差。
1)相對距離變化影響
圖5 為移動基站與流動站同步運動狀態下的相對距離變化與流動站定位狀態,相對距離由遠及近運動過程中,定位解缺失和單點解現象較多集中在相對距離15 km 以上的過程,15 km 以下偶見6 處無定位解。
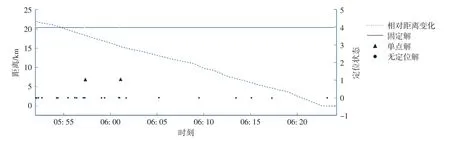
圖5 同步運動狀態下的相對距離變化與定位狀態Fig.5 The relative distance and the positioning state when mobile base station and rover station move synchronously
圖6 為移動基站靜止與流動站運動狀態下的相對距離變化與流動站定位狀態,由圖中可以看出,根據PPK 結果計算可知相對距離逐漸由遠及近運動過程中,02:12 左右(約13 km)集中出現無定位解和單點解現象,其他區段(約9.5 km)偶見1處無定位解。
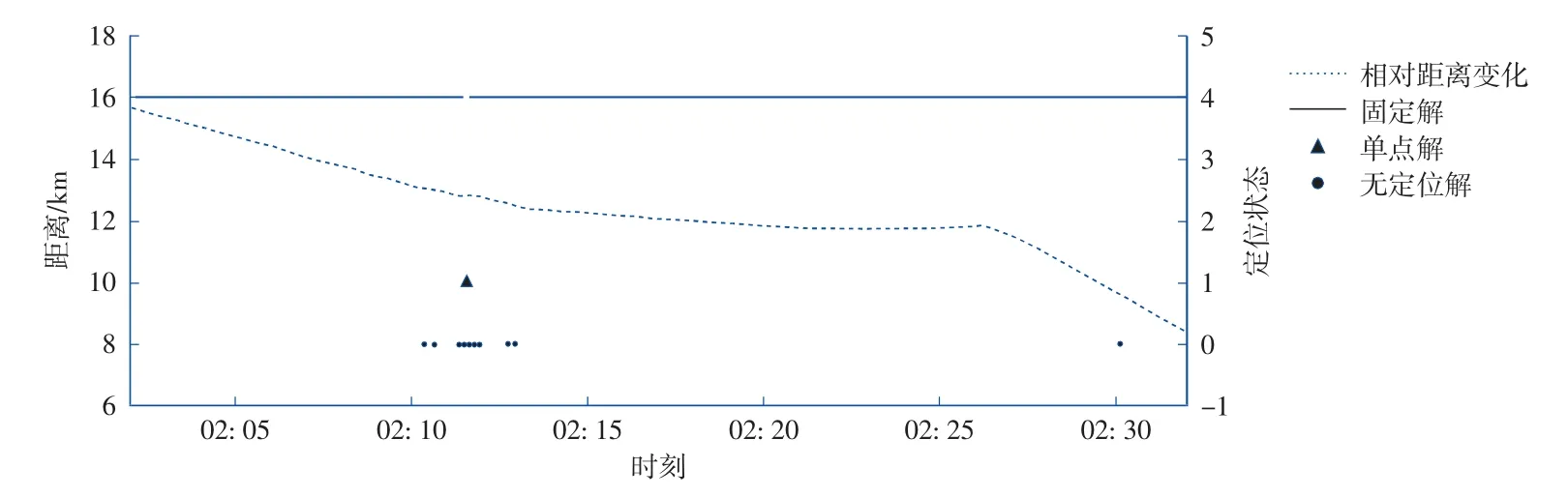
圖6 移動基站靜止、流動站運動狀態下的相對距離變化與定位狀態Fig.6 The relative distance and the positioning state when mobile base station is static and rover station is kinetic
2)相對高差變化影響
圖7 為移動基站與流動站同步運動狀態下的相對高差變化與流動站定位狀態,移動基站相對流動站的高差變化整體較平穩,06:00 出現1 處突然升高,并未造成顯著的GNSS 無定位解及單點解現象。

圖7 移動基站與流動站同步運動狀態下的相對高差變化與定位狀態Fig.7 The height difference and the positioning state when mobile base station and rover station move synchronously
圖8 為移動基站靜止與流動站運動狀態下的相對高差變化與流動站定位狀態,移動基站相對流動站高差變化整體較平穩,在02:10—02:13 出現2 處突然下降,均出現GNSS 無定位解現象,其中第2 次下降幅度較大、持續時間長且伴隨單點解現象。

圖8 移動基站靜止、流動站運動狀態下的相對高差變化與定位狀態Fig.8 The height difference and the positioning state when mobile base station is static and rover station is kinetic
基于實時星站差分定位的移動基站播發RTK差分信號,RTK 流動站動態定位過程中偶見無定位解和單點解現象,移動基站相對流動站距離變化在15 km 以上時,出現定位不佳的概率較大;移動基站相對流動站高差突然升高時對流動站定位無影響,移動基站相對流動站高差突然降低時對流動站定位影響較大,流動站出現定位不佳的概率較大。
3 流動站零基線(定向)實時動態穩定性分析
施工車輛及船舶在實際作業過程中,經常會配備多臺GNSS 差分定位設備,完成定位定向以輔助施工。統計2 個流動站同步定位差值并繪圖分析。
3.1 移動基站-流動站同步運動模式
圖9 為移動基站運動時2 個流動站動態定位差,N、E 方向定位差值基本保持在毫米級,N、E 方向在01:42、01:45 出現小幅度波動,振幅不超過±0.8 cm,N、E 方向整過程定位較穩定;2 個流動站H 方向定位差值基本保持在±1.5 cm 以內浮動。
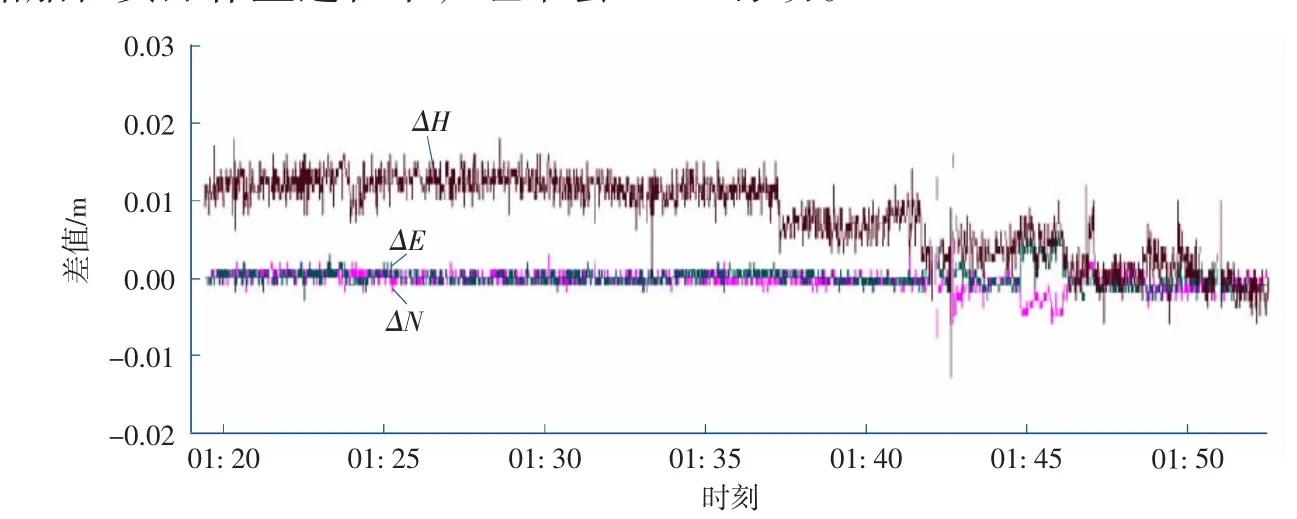
圖9 移動基站運動時2 個流動站動態定位差Fig.9 The dynamic positioning difference between two rover stations when mobile base station is kinetic
3.2 移動基站靜止-流動站運動模式
圖10 為移動基站靜止時2 個流動站動態定位差,開始定位出現跳躍并很快趨于穩定,02: 11后出現1 次跳點,對應圖8 中的單點解。N、E 方向定位差值基本保持在毫米級,N、E 方向整過程定位較穩定;2 個流動站H 方向定位差值基本保持在±1.5 cm 內浮動。
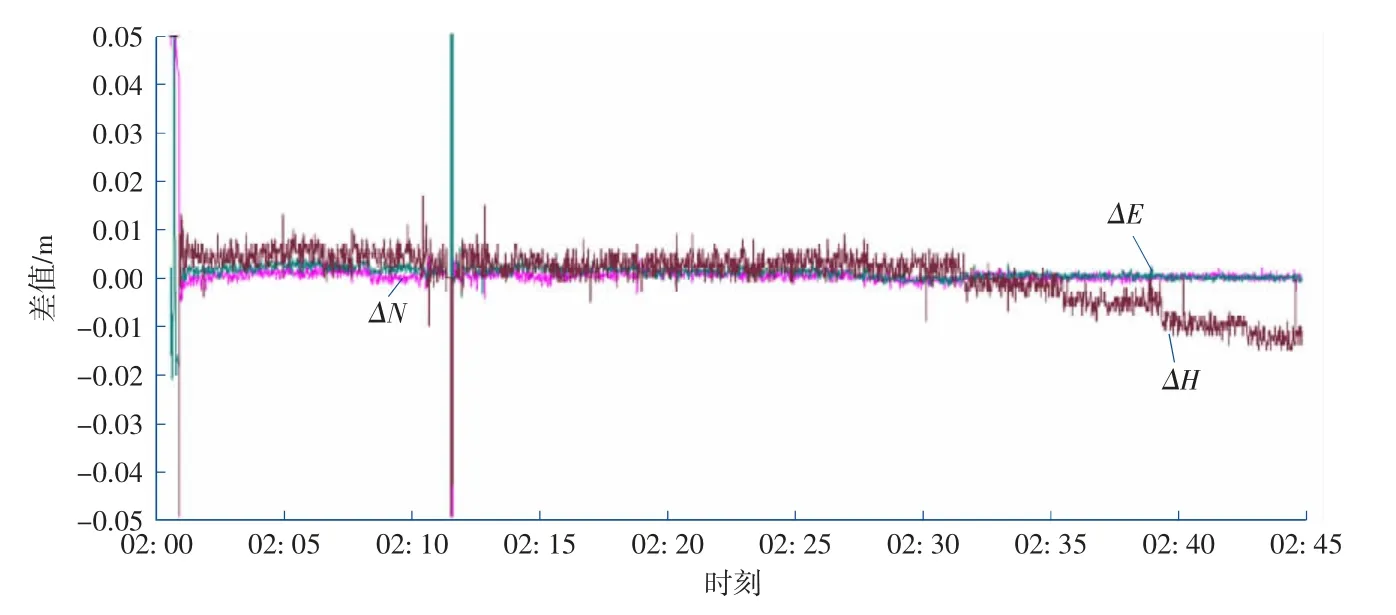
圖10 移動基站靜止時2 個流動站動態定位差Fig.10 The dynamic positioning difference between two rover stations when mobile base station is static
3.3 移動基站運動-流動站靜止模式
圖11 為移動基站運動時2 個流動站靜止定位差,N、E 方向定位差值基本保持在毫米級,N、E 方向整過程定位較穩定;2 個流動站H 方向定位差值基本保持在±1.5 cm 內浮動。
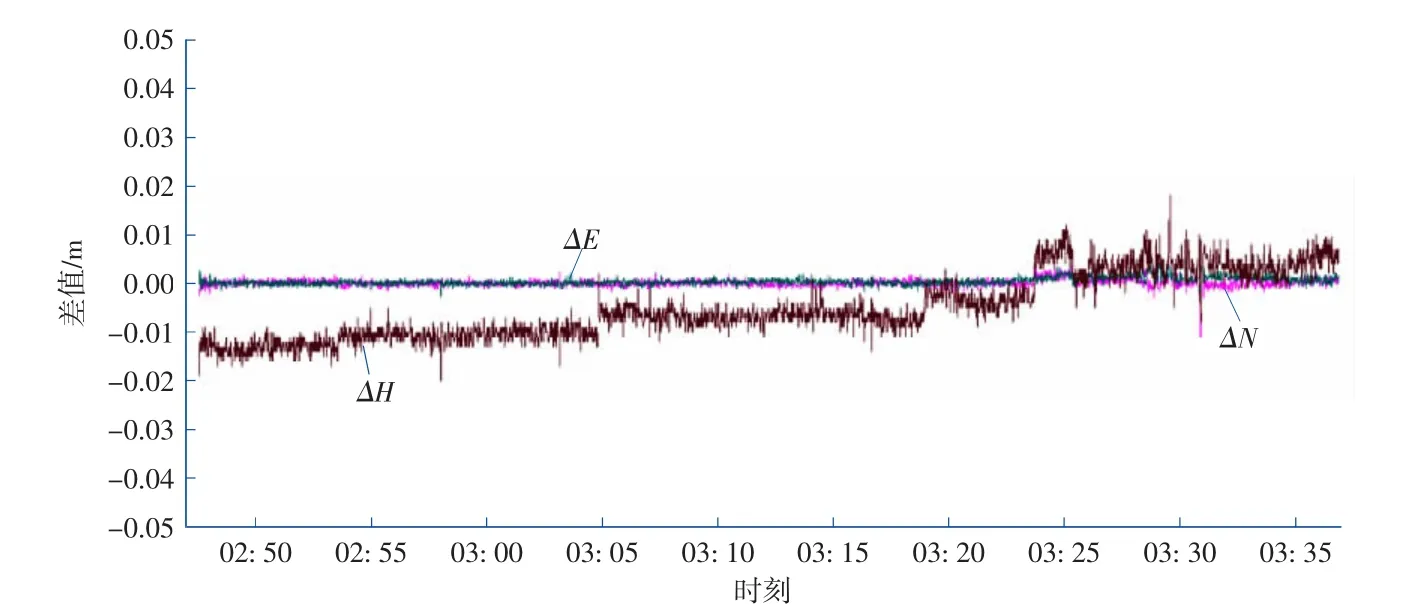
圖11 移動基站運動時2 個流動站靜止定位差Fig.11 The static positioning difference between two rover stations when mobile base station is kinetic
基于實時星站差分定位的移動基站播發RTK差分信號,2 個流動站在移動基站-流動站同步運動、移動基站靜止-流動站運動、移動基站運動-流動站靜止3 種模式下的零基線測試顯示,N、E方向的定位差值基本保持在毫米級,不超過1.0 cm;H 方向的定位差值不超過±1.5 cm,定位系統總體內部誤差較小,可提供穩定的高精度定位定向服務。
4 結語
GNSS 移動基站應用于水運工程中,通過試驗評估該作業模式下RTK 流動站的定位性能。與同步PPK 定位比較,RTK 流動站的N、E 方向可在3 min 內實現收斂,收斂后20 min 內偏差RMS 不超過1.0 cm;H 方向可在4 min 內實現收斂,收斂后20 min 內偏差RMS 不超過3.0 cm。移動基站與RTK 流動站相對距離在15 km 以上時出現定位不佳的概率較大;移動基站與RTK 流動站相對高差突然降低時易造成RTK 流動站定位不佳。2 個流動站零基線定位的N、E 方向差值保持在毫米級,H 方向差值不超過±1.5 cm,定位定向穩定性高。針對極少數無定位解或單點解現象,可通過實時濾波進行處理。GNSS 移動基站可實現其高精度星站差分能力的共享,極大降低車輛及船舶集群作業的星站差分服務費。本試驗采用車載方式,試驗環境局限于臨海陸域;船載通訊設備多、電磁干擾大,遠海水域風浪條件復雜,船載及遠海水域應用效果還有待進一步驗證。
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50
