基于注意力機制的CNN-LSTM模型的航跡預(yù)測
2023-12-27 07:18:44周志崇曹明松胡延達
空軍工程大學學報 2023年6期
關(guān)鍵詞:模型
王 堃,周志崇,曲 凱,曹明松,胡延達
(1.93886部隊,烏魯木齊,830001;2.空軍工程大學空管領(lǐng)航學院,西安,710051;3.陜西師范大學計算機科學學院,西安,710119)
空中交通管理(air traffic management,ATM)的一項重要職能是對航空器在空中飛行時的航路、高度、速度、起降等行為進行指導(dǎo)和控制,確保航空器在空中飛行過程中的安全和有序。其目標是對航空器進行安全有效的管理并致力于在空域管理系統(tǒng)中提供最優(yōu)的空域容量[1]。完成上述目標要求管制員對航空器進行排序和分離,管制員通常使用決策支持系統(tǒng)(decision support systems,DST)監(jiān)視每架航空器的狀態(tài),并解決飛行沖突[2]。為了確保空域航空器密度在安全范圍內(nèi),管制員使用DST從其他監(jiān)視系統(tǒng)中獲得的未來空中交通流量信息執(zhí)行流量管理決策,這些監(jiān)視系統(tǒng)功能的核心是軌跡預(yù)測。軌跡預(yù)測是在給定航空器狀態(tài)和環(huán)境信息的前提下,預(yù)測航空器未來的位置。不準確的軌跡預(yù)測會對ATM和DST的性能產(chǎn)生負面影響,例如,會降低管制員扇區(qū)內(nèi)最大航空器容量,增加沖突的數(shù)量和系統(tǒng)負擔,增加因躲避其他航空器而導(dǎo)致的燃料消耗,更多燃料消耗會導(dǎo)致環(huán)境污染。因此,軌跡預(yù)測效果對DST的性能表現(xiàn)尤為重要。目前,ATM正朝著基于軌跡的運行模式(trajectory-based operations,TBO)發(fā)展[3]。
由于空中交通量的不斷增大及航空資源的日益短缺,ATM系統(tǒng)在航空交通管理中面臨巨大壓力[4]。盡管之前的軌跡預(yù)測精度已經(jīng)能夠在一定程度上應(yīng)對空中交通環(huán)境,但是面臨日益擁堵的空域,還需要提高軌跡預(yù)測的精度以應(yīng)對復(fù)雜的空中交通狀況。利用詳細的數(shù)據(jù)并使用先進的方法才能讓ATM系統(tǒng)自動化、智能化地做出決策,進而打造出安全、有序和高效的空中交通環(huán)境[5]。
伴隨深度學習的不斷發(fā)展,其在自動駕駛[6]、機器人控制[7]、視頻監(jiān)控[8]等領(lǐng)域具有廣泛的應(yīng)用,并且表現(xiàn)優(yōu)異。深度學習同樣可以用于軌跡預(yù)測,其中包括預(yù)測物體、人或車輛等在未來幾秒或幾分鐘內(nèi)的運動軌跡[9-11]。使用深度學習進行軌跡預(yù)測的好處在于不僅可以從大量歷史數(shù)據(jù)中學習軌跡的運動規(guī)律和特征,提高預(yù)測的準確度,而且可以更好地應(yīng)對復(fù)雜場景。
隨著人工智能和大數(shù)據(jù)研究的不斷發(fā)展,機器學習的方法逐漸成為航跡預(yù)測不可或缺的方法。該方法的優(yōu)點在于只需要對過去的航跡進行處理,更多地依賴于航跡的相似性,可以將輸入與輸出的維度進行重構(gòu)[12]。
機器學習方法初期使用回歸模型進行航跡預(yù)測。文獻[13]針對航空器中短期的軌跡預(yù)測問題,提出一種新方法。該方法基于局部線性泛函回歸,其中涉及局部化、數(shù)據(jù)預(yù)處理和利用小波分解求線性回歸。此方法不使用任何航空和物理參數(shù),只使用了過去航空器的軌跡。文獻[14]提出利用航空器航線數(shù)據(jù)和氣象數(shù)據(jù),對航空器進行排序和合并的軌跡預(yù)測方法。該方法使用歷史航跡信息訓(xùn)練模型以達到預(yù)測飛行時間的目的。模型的輸入分別為航空器的地面速度、航空器的類型、航空器到達航信起點處的高度、高空風、地面風。該模型用于檢查沖突和跑道吞量,并且可以通過該模型對連續(xù)下降航空器之間的初始距離間隔進行判斷。
上述回歸模型也存在問題,即每次建立飛行模型都需要使用大量的航跡數(shù)據(jù)。隨著循環(huán)神經(jīng)網(wǎng)絡(luò)在序列預(yù)測上的優(yōu)勢逐漸顯現(xiàn),長短期記憶網(wǎng)絡(luò)(long-short-term memory,LSTM)作為循環(huán)神經(jīng)網(wǎng)絡(luò)的變體,其在處理時序問題上有著優(yōu)異的表現(xiàn),因此經(jīng)常被應(yīng)用于時序預(yù)測問題中。航跡預(yù)測方面,也逐漸采用該網(wǎng)絡(luò)進行軌跡預(yù)測[15]。文獻[16]通過LSTM網(wǎng)絡(luò)模型對航空器的軌跡進行預(yù)測。LSTM通過門結(jié)構(gòu)使得當前預(yù)測任務(wù)中包含過去序列的信息。LSTM中使用滑動窗口保持了長序列中相鄰狀態(tài)的連續(xù),有利于航跡預(yù)測精度的提高。該方法分別對三維航跡和四維航跡分別實驗,其性能表現(xiàn)優(yōu)于馬爾科夫模型和加權(quán)馬爾科夫模型。文獻[17]將蟻獅優(yōu)化算法與LSTM網(wǎng)絡(luò)相結(jié)合,利用蟻獅優(yōu)化算法的優(yōu)點對LSTM網(wǎng)絡(luò)的閾值和初始權(quán)值進行優(yōu)化,提高了預(yù)測結(jié)果的精度和模型的收斂速度,有效避免了算法陷入局部最優(yōu)解,提高了LSTM的性能。通過與BP神經(jīng)網(wǎng)絡(luò)和LSTM神經(jīng)網(wǎng)絡(luò)的對照實驗表明,算法的航跡預(yù)測能力更強。文獻[18]提出了基于“當前”統(tǒng)計模型的機動目標模糊自適應(yīng)濾波算法(fuzzy adaptive CSAF,FACSAF),該算法既不存在突變問題,也沒有加速度區(qū)間限制。仿真結(jié)果表明,在預(yù)測精度方面效果較好。文獻[19]利用不同的深度學習模型,對飛行器航跡從不同角度進行預(yù)測。一方面,通過深度前饋神經(jīng)網(wǎng)絡(luò)(deep neural networks,DNN)對實際航跡與目標航跡之間經(jīng)緯度之間的偏差進行預(yù)測。另一方面,通過LSTM對未來幾個時刻的飛行軌跡做長期預(yù)測。DNN模型對單步范圍的預(yù)測結(jié)果更加準確,LSTM雖然預(yù)測的精度不如DNN,但是卻可以實現(xiàn)多步預(yù)測,通過2個模型的結(jié)合,使得算法在航跡預(yù)測及飛行安全方面具有更好的效果。此外,模型的不確定性采用貝葉斯方法進行表征。
由于機器學習方法在航跡預(yù)測方面表現(xiàn)優(yōu)異,本文也將在下面的章節(jié)中采用機器學習方法對航空器軌跡進行實時預(yù)測。
1 基于注意力機制的CNN-LSTM模型
4D(航班的三維空間位置和時間)航跡預(yù)測是指在空中交通控制系統(tǒng)中,通過對航空器航跡進行預(yù)測和規(guī)劃,使得不同航班的飛機能夠在同一時空上安全地交錯飛行。
卷積神經(jīng)網(wǎng)絡(luò)(convolutional neural networks,CNN)與LSTM相結(jié)合的網(wǎng)絡(luò)模型在4D航跡預(yù)測任務(wù)中表現(xiàn)優(yōu)異,但是該模型的泛化能力較差,無法關(guān)注航跡數(shù)據(jù)中最重要的部分,容易受不相關(guān)信息的影響;該模型的魯棒性不強,容易受到航跡數(shù)據(jù)中噪聲和變化的影響。
受文獻[20]的啟發(fā),本文提出了基于注意力(Attention)機制的CNN-LSTM模型,即CNN-LSTM-Attention,與文獻[20]提出的模型重名。本模型受到了其將Attention機制結(jié)合到LSTM想法的啟發(fā),因此采用相同的命名。該模型首先使用一維卷積對航跡數(shù)據(jù)的多維度特征進行提取,從而減少輸入特征的數(shù)量。然后利用卷積層獲取的多維度時序數(shù)據(jù)作為LSTM的輸入,通過LSTM提取上下文的信息。最后借用注意力機制的基本思想,即幫助學習網(wǎng)絡(luò)權(quán)重分布[21],為不同時序節(jié)點的輸出賦予權(quán)重,以聚焦關(guān)鍵航跡信息,達到提高預(yù)測模型泛化能力和魯棒性的效果。下面將對模型的整體架構(gòu)和超參數(shù)設(shè)定進行介紹。
1.1 模型整體框架
基于注意力機制的CNN-LSTM模型是由CNN網(wǎng)絡(luò)、LSTM網(wǎng)絡(luò)和注意力機制組合而成的,如圖1所示。輸入層是通過構(gòu)造數(shù)據(jù)樣本,將時序數(shù)據(jù)構(gòu)造成矩陣格式,輸入CNN網(wǎng)絡(luò)中;CNN層中使用卷積操作對輸入的數(shù)據(jù)進行降維和特征提取。LSTM層將提取到的特征以時序數(shù)據(jù)的形式輸入LSTM網(wǎng)絡(luò);注意力層對 LSTM網(wǎng)絡(luò)隱藏層輸出使用注意力機制進行加權(quán)平均計算;輸出層是通過全連接層輸出最終的預(yù)測軌跡。
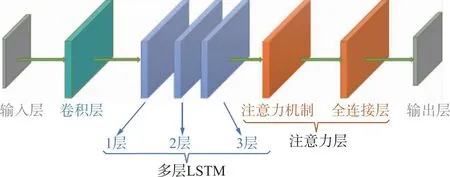
圖1 基于注意力機制的CNN-LSTM網(wǎng)絡(luò)結(jié)構(gòu)
1.2 模型的輸入與輸出
本模型使用航跡數(shù)據(jù)作為模型的輸入。某一時刻t的位置以時間(t)、橫軸坐標(x)、縱軸坐標(y)、豎軸坐標(z)、正北風速(windy)和正東風速(windx)這6個特征進行表示。t時刻航空器狀態(tài)表示Xt,如式(1)所示。模型的輸出是未來時刻的時間(t)、橫軸坐標(x)、縱軸坐標(y)和豎軸(z)作為模型的輸出。t+1時刻,模型的輸出Yt+1,表示為式(2)。將6個連續(xù)時刻的航跡特征數(shù)據(jù)X(t-5),…,X(t-1),X(t)作為模型的輸入,將t+1時刻的航空器位置及時間Y(t+1)作為模型的輸出,如式(3)所示。
X(t)={t,x,y,z,windx,windy}
(1)
Y(t+1)={t,x,y,z}
(2)
Y(t+1)=f({X(t-5),…,X(t-1),X(t)})
(3)
1.3 模型的訓(xùn)練流程
CNN層通過一維卷積對航跡進行降維和特征提取。具體過程如下:首先是卷積操作,由于模型采用的一維卷積,卷積核將按照單一的方向進行卷積。然后,使用ReLU函數(shù)進行激活。最后經(jīng)過最大池化將所得向量輸入多層LSTM中。本文設(shè)計的模型共有3層LSTM,并在每層LSTM后都設(shè)置了dropout避免過擬合。dropout是一種常用的正則化技術(shù),可以用于減少過擬合現(xiàn)象,提高模型的泛化能力。上一層LSTM輸出的隱藏狀態(tài)作為下一層LSTM的輸入,以此類推,最后一層輸出的隱藏狀態(tài)將會傳遞給注意力層進行加權(quán)計算。注意力機制可以提高重要時刻航跡點對最終結(jié)果的影響,提升模型預(yù)測的精度。將多層LSTM中最后一層的隱藏狀態(tài)Hi作為注意力層的輸入,對輸入向量做加權(quán)求和。使用一個全連接層進行訓(xùn)練,設(shè)置激活函數(shù)為tanh,得到隱藏狀態(tài)的分數(shù)為Si,如式(4)所示。全連接層的輸出Si使用softmax函數(shù)進行歸一化,得到隱藏狀態(tài)的權(quán)重αi,αi代表每一個時間步對預(yù)測結(jié)果的重要性,計算公式如式(5)所示。注意力訓(xùn)練過程表示如下:利用得到的權(quán)重與隱藏狀態(tài)向量進行加權(quán)求和得到最終的輸出Ci,如式(6)所示。
Si=tanh(WHi+bi)
(4)
αi=softmax(Si)
(5)
(6)
2 數(shù)據(jù)預(yù)處理
本節(jié)將介紹4D航跡預(yù)測的數(shù)據(jù)集構(gòu)造工作。首先,對航空軌跡數(shù)據(jù)進行介紹和數(shù)據(jù)預(yù)處理,數(shù)據(jù)預(yù)處理包括去除重復(fù)點、去除離機場過遠的點和建立三維坐標系表示航空器的位置、補齊缺失數(shù)據(jù)點等操作。其次,對模型的訓(xùn)練樣本和標簽進行定義,最后,將數(shù)據(jù)進行歸一化操作后,完成數(shù)據(jù)的預(yù)處理。
2.1 制作數(shù)據(jù)集
由于目前的航空軌跡數(shù)據(jù)集中航跡數(shù)據(jù)缺乏明確的分類,并且航跡多為高空航跡,缺乏進離場航空器軌跡,故本文將對所需的數(shù)據(jù)集進行制作。例如,使用來自某機場的真實航跡數(shù)據(jù),數(shù)據(jù)中包含機場中多架航空器的航跡及航行過程中的天氣狀況。數(shù)據(jù)集中包含了96 d的有效航跡數(shù)據(jù)。數(shù)據(jù)集中的航跡數(shù)據(jù)是通過ADS-B設(shè)備得到航空器精確位置和時間戳,氣象數(shù)據(jù)是通過機場自動天氣觀測系統(tǒng)獲得的,通過時間戳的匹配,將氣象數(shù)據(jù)附加到航跡數(shù)據(jù)后面。得到原始數(shù)據(jù)后,還需要對原始數(shù)據(jù)預(yù)處理以達到訓(xùn)練模型的要求。預(yù)處理包括刪除沒有位置信息的壞點;去除航空器標識和位置信息相同的重復(fù)點;去掉距離跑道頭或跑道尾超過5 km并且高度在1.8 km以上的點;建立三維坐標系,將數(shù)據(jù)轉(zhuǎn)換為坐標點,其中左邊原點位于跑道尾,x軸指向跑道;在上述坐標系中,對飛速沿著跑道和垂直于跑道進行分解;對于缺失的數(shù)據(jù)點,采用三次線性插值法補充缺失點;處理后的數(shù)據(jù)以7∶3的比例被劃分為訓(xùn)練集和測試集。航跡數(shù)據(jù)格式,如表1所示。

表1 航跡數(shù)據(jù)展示
其中x、y、z表示的是航空器在以跑道末端為原點的三維坐標系中的位置,其中x軸與跑道平齊。Windx和Windy分別表示x軸方向和y軸方向的風速。本文制作的數(shù)據(jù)集以3維坐標的形式記錄航空器位置,可以更好地挖掘3個維度的特征;數(shù)據(jù)集中具有風速信息,可以更好地探究環(huán)境對航跡預(yù)測影響;數(shù)據(jù)集均為進離場航班,可以更好地研究進離場航空器航跡的特點。
2.2 數(shù)據(jù)樣本構(gòu)造方法
本實驗使用的數(shù)據(jù)包含時間、橫軸坐標、縱軸坐標、豎軸坐標、橫軸方向風速、縱軸方向風速共6個特征。構(gòu)造數(shù)據(jù)樣本時,將所有時間步的6個軌跡數(shù)據(jù)造成一個二維矩陣,矩陣的行數(shù)為樣本的總個數(shù),列數(shù)為特征數(shù)6。模型選用6個時間步的數(shù)據(jù)對下一時間步中的時間、橫軸坐標、縱軸坐標和豎軸坐標進行預(yù)測。參照CNN在處理圖像數(shù)據(jù)的方法,采用6×6的滑動窗口在矩陣上由上至下滑動,如圖2所示,滑動步長為1,其中滑動窗口中的數(shù)據(jù)作為訓(xùn)練樣本。滑動窗口的下一行中的時間、橫軸坐標、縱軸坐標、豎軸坐標作為標簽。依次類推,直到標簽到達最后一行為止。
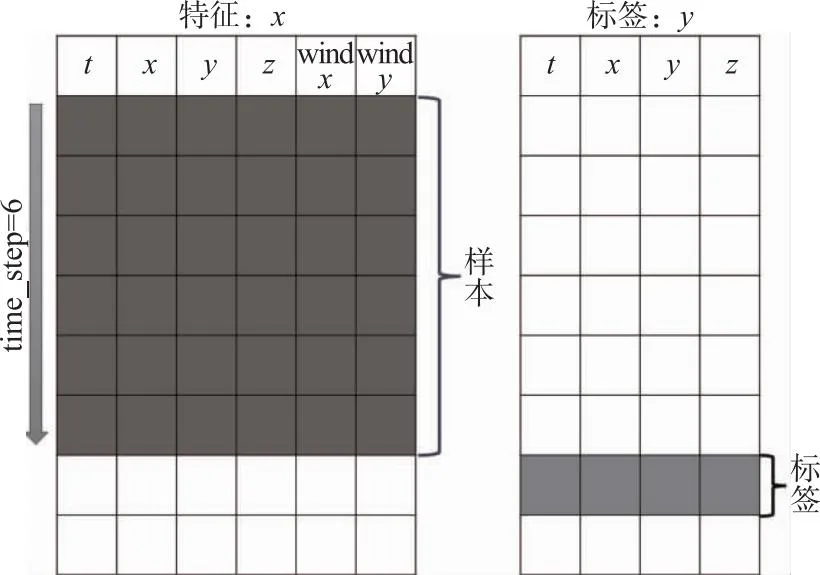
圖2 樣本構(gòu)造示意圖
2.3 樣本歸一化處理
歸一化是一種用于訓(xùn)練深度神經(jīng)網(wǎng)絡(luò)的技術(shù)。它的目的是將輸入數(shù)據(jù)進行歸一化處理,使得網(wǎng)絡(luò)在訓(xùn)練過程中更加穩(wěn)定、收斂更快、避免梯度消失等問題。本文采用離差標準化的方式將航跡樣本數(shù)據(jù)歸一化[22]。離差標準化(min-max scaling)是一種常見的數(shù)據(jù)標準化方法,用于將數(shù)值型的數(shù)據(jù)縮放到一個固定的區(qū)間范圍內(nèi),通常是[0,1]或[-1,1]。本文采用的離差標準化公式如式(7)所示:
(7)

反歸一化是一種將標準化后的數(shù)據(jù)轉(zhuǎn)換回原始數(shù)據(jù)的方法。在訓(xùn)練模型時,通常需要將輸入航跡樣本數(shù)據(jù)進行歸一化處理,以提高模型的訓(xùn)練效果。但是,在使用模型對新的航跡樣本進行預(yù)測時,需要將預(yù)測結(jié)果進行反歸一化,以得到原始數(shù)據(jù)的結(jié)果。反歸一化的方法與歸一化的方法相對應(yīng)。如果歸一化是將原始數(shù)據(jù)縮放到[0,1]的范圍內(nèi),那么反歸一化就是將標準化后的數(shù)據(jù)恢復(fù)到原始的航跡數(shù)據(jù)范圍內(nèi)。本文反歸一化的公式如式(8)所示:
(8)
3 實驗與結(jié)果分析
3.1 模型訓(xùn)練
本文模型基于TensorFlow框架實現(xiàn),實驗所采用的硬件環(huán)境為:Intel Xeon E5-2630 V4處理器,64 GB內(nèi)存,NVIDIA TITAN XP GPU顯卡。將模型的超參數(shù)設(shè)置如下:
3.1.1 輸入層參數(shù)設(shè)置
設(shè)置輸入數(shù)據(jù)的參數(shù),其中包含批處理大小、時間窗的設(shè)置和特征數(shù)。本模型將批處理大小設(shè)置為128,時間窗口設(shè)置為6,特征數(shù)設(shè)置為6,一條航跡樣本可以用6×6的實數(shù)矩陣R6×6進行表示,R6×6中第i個時間步的航跡向量記為xi。
3.1.2 CNN參數(shù)設(shè)置
航跡樣本數(shù)據(jù)在CNN中會經(jīng)過卷積、池化操作。本模型對航空軌跡數(shù)據(jù)采取一層一維卷積進行處理,其中卷積核的大小為3,數(shù)目為32,滑動步長設(shè)為1。進行一維卷積時,依次選取R6×6中第i個時間步到第i+2個時間步的二維矩陣進行卷積操作。激活函數(shù)選用ReLU。經(jīng)過一維卷積的提取,得到6×1形狀的特征圖,共有32個卷積核,最終得到32個特征圖。對所得特征圖進行最大池化,池化窗口大小為2,步長為2,最終得到32個3×1形狀的特征圖。將所得特征圖表示為32×3的二維矩陣,該二維矩陣表示不同卷積核下航跡數(shù)據(jù)的聯(lián)系。將該數(shù)據(jù)輸入到LSTM網(wǎng)絡(luò)中。
3.1.3 LSTM參數(shù)設(shè)置
(1)理想整體發(fā)電效率隨負荷增加而單調(diào)增大。由于給水流量波動導(dǎo)致的實時參數(shù)滯后,以及環(huán)境溫度對背壓和發(fā)電效率的影響,直接空冷機組的實際整體發(fā)電效率、汽輪發(fā)電機整體效率、汽輪機理想循環(huán)熱效率隨負荷增加并未表現(xiàn)出明顯單調(diào)遞增的規(guī)律。
在LSTM層,主要對LSTM層數(shù)、隱藏層節(jié)點個數(shù)、激活函數(shù)和丟棄率進行設(shè)置。LSTM的層數(shù)設(shè)置為3。將LSTM層隱藏節(jié)點的個數(shù)均設(shè)置為50,其激活函數(shù)使用默認的Sigmoid和Tanh。考慮模型和數(shù)據(jù)情況,將本模型丟棄率dropout設(shè)置為0.25。
3.1.4 Attention參數(shù)設(shè)置
在注意力層,要對LSTM輸出的32×3狀態(tài)矩陣進行處理(實際大小是32×LSTM隱藏層維度數(shù)),其結(jié)構(gòu)如圖3所示。32代表LSTM的seq_length,因此Attention層以32×3的矩陣為解碼器的隱層狀態(tài)(decoder hidden state),以其各行的1×3的矩陣為對應(yīng)特征點的隱層狀態(tài)(encoder hidden state),通過點乘計算得分。然后再利用Softmax對各得分進行計算,得到各32個特征點隱層狀態(tài)的權(quán)重。將計算出的權(quán)重與對應(yīng)的隱層狀態(tài)相乘,得到加權(quán)后的隱藏狀態(tài)。其結(jié)果為32個1×3的矩陣,連接為32×3的矩陣后,輸入全連接層,最終輸出1×4的航跡預(yù)測作為輸出。

圖3 Attention網(wǎng)絡(luò)結(jié)構(gòu)
注意力層有Soft Attention和Hard Attention 2種方案。Hard Attention的權(quán)重向量通常是一個One-Hot向量,這在某些情況下會具有更好的時效性,但是會犧牲一部分精度。由于本文模型的隱層狀態(tài)只有32,對計算效率的影響并不大,因此只需在實驗中比較2種方案的精確度。
3.1.5 其他超參數(shù)設(shè)置
其他超參數(shù)包括優(yōu)化器、學習速率和迭代次數(shù)。本模型選用Adam優(yōu)化器更新模型的參數(shù)以最小化損失函數(shù),學習速率設(shè)置為0.001,迭代次數(shù)設(shè)置為1 000。
3.2 預(yù)測誤差衡量指標
常用的衡量預(yù)測值與實際值之間誤差大小的指標有均方根誤差(root mean square error,RMSE)、平均絕對誤差(mean absolute error,MAE)和平均絕對百分比誤差(mean absolute percentage error,MAPE)。它們分別如公式(9)~(11)所示:
(9)
(10)
(11)
3.3 定性實驗
為了驗證本文提出的航跡預(yù)測模型的性能,本節(jié)對提出的基于注意力機制的CNN-LSTM模型與CNN-LSTM模型和LSTM模型進行定性對比實驗,通過對比預(yù)測的航跡曲線分析模型的效果,本節(jié)以某航空器航跡為例給出3個模型的預(yù)測效果。3個模型的二維和三維航跡的對比如圖4和圖5所示。
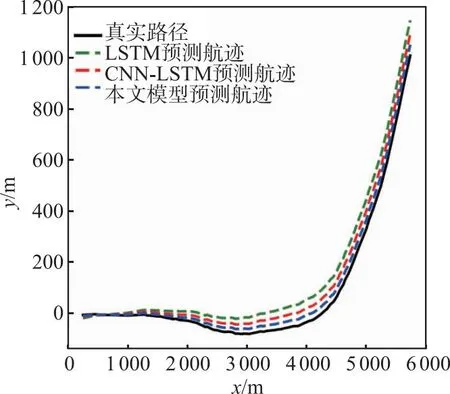
圖4 二維航跡對比
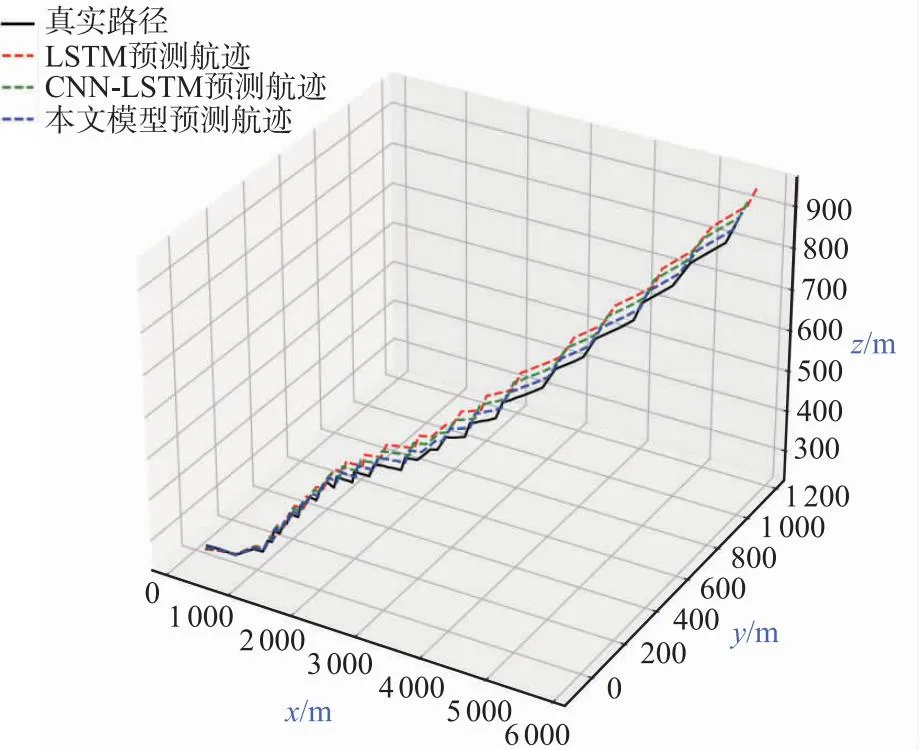
圖5 三維航跡對比
圖4中x、y表示的是航空器在以跑道末端為原點,沿跑道方向為x軸的二維坐標系中的位置。LSTM模型預(yù)測出的二維航跡可以擬合真實航跡的運行狀態(tài),但是仍存在一定程度的偏差,二維航跡曲線能夠保持平滑地移動。CNN-LSTM模型預(yù)測出的二維航跡可以較好地擬合真實航跡的運行狀態(tài),與LSTM模型相比,二維航跡偏差明顯減小,預(yù)測航跡曲線也更加平滑。CNN-LSTM-Attention模型可以很好地擬合真實航跡的運行狀態(tài)。預(yù)測出的航跡曲線幾乎與真實二維航跡曲線重合。
圖5中x、y、z表示的是航空器在以跑道末端為原點,沿跑道方向為x軸的三維坐標系中的位置。LSTM模型的三維預(yù)測航跡已經(jīng)可以擬合出航跡路線,但是與實際航跡的誤差仍然較大,特別是在高度方面,可以明顯觀察到與實際航跡的差距,使用LSTM模型雖然可以進行4D航跡預(yù)測,但模型仍有提高的空間。CNN-LSTM模型的三維預(yù)測航跡與真實航跡的誤差較小,雖然高度差距比LSTM模型小,但是仍存在一定程度的偏差。CNN-LSTM-Attention模型擬合出的三維航跡與真實航跡誤差很小,可以很好地擬合實際飛行的航跡。
注意力機制分為2種變體,Hard Attention和Soft Attention。為選擇出更適用于航跡預(yù)測的變體,進行對比實驗,實驗結(jié)果如圖6所示。
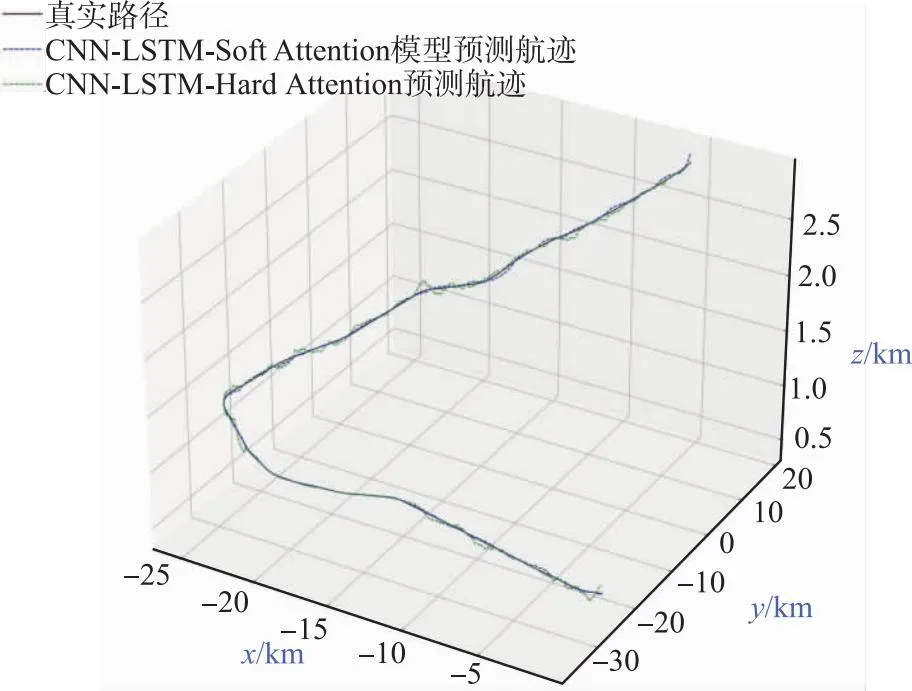
圖6 不同Attention機制的對比
Soft Attention的實驗最終是使用SoftMax函數(shù)對LSTM層的狀態(tài)進行權(quán)重分配,Hard Attention則只選擇一個分數(shù)最大的位置進行關(guān)注,其余狀態(tài)均被拋棄。為了表現(xiàn)出明顯差異,選用一條較長的航跡進行對比預(yù)測。在實驗結(jié)果中可以觀察到,2種變體都對航跡進行了良好的預(yù)測,但是Soft Attention預(yù)測的航跡更為穩(wěn)定,Hard Attention的預(yù)測則出現(xiàn)了震蕩,且2種變體的計算時間沒有明顯差別,因此Soft Attention更適合用于航跡預(yù)測。
除去Attention機制的選擇外,還有一個參數(shù)尤為重要,即LSTM的層數(shù)。增加LSTM的層數(shù)可以增加模型的表示能力,使其能夠更好地捕捉輸入序列中的長期依賴關(guān)系和復(fù)雜模式。這對于航跡預(yù)測任務(wù)中的時序數(shù)據(jù)是重要的,因為航跡通常具有長期的時間依賴性。但是增加LSTM的層數(shù)會增加模型的復(fù)雜度,所以本文應(yīng)用了Attention機制。為選擇最合適的LSTM層數(shù),進行對比實驗,實驗結(jié)果如圖7所示。
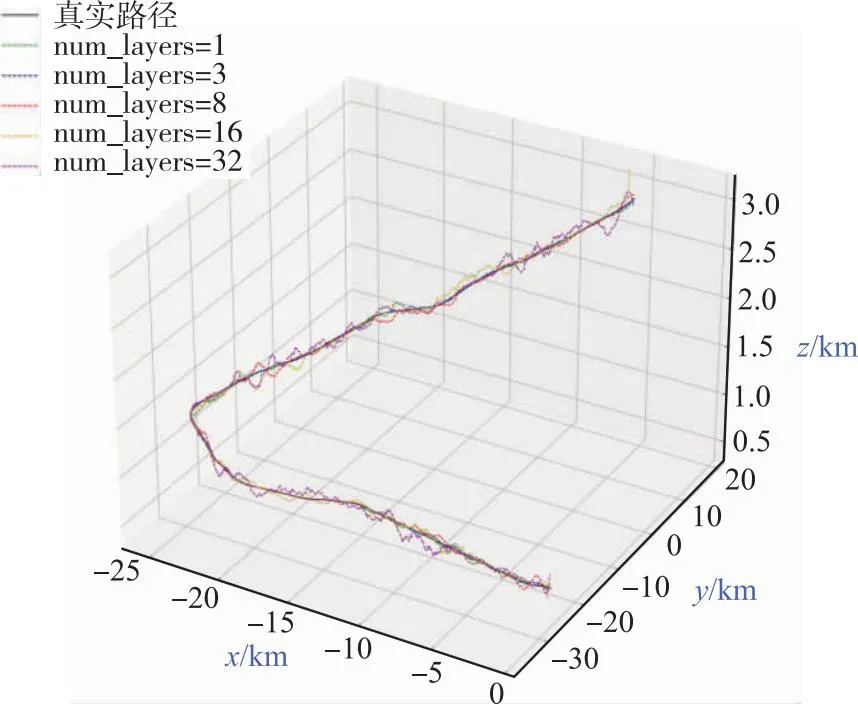
圖7 不同LSTM層數(shù)的對比
可以看出,在層數(shù)為1或3時,區(qū)別并不大,當層數(shù)逐漸增加,模型預(yù)測的精度不增反降,這可能是由于過多的層數(shù)引入的噪聲或冗余導(dǎo)致的。為更好地捕獲航跡的時序性,本文選擇LSTM的層數(shù)為3。
總的來說,CNN-LSTM-Attention模型預(yù)測出的航跡擬合度最高,最接近真實航跡,CNN-LSTM模型效果次之,LSTM模型擬合度最低。由此看來,模型的4D航跡預(yù)測精度由高到低排名依次是CNN-LSTM-Attention模型、CNN-LSTM模型和LSTM模型。且其注意力機制中的Soft Attention更適用于航跡預(yù)測。
3.4 定量實驗
為了驗證本文提出的航跡預(yù)測模型的性能,本節(jié)對提出的基于注意力機制的CNN-LSTM模型與目前常用的4D航跡預(yù)測算法進行定量實驗,通過對比特征的誤差分析模型的效果,以某航空器航跡為例給出3個模型的預(yù)測效果。通過計算誤差衡量指標RMSE、MAE和MAPE的值對預(yù)測航跡和真實航跡的誤差進行定量分析,,衡量指標的數(shù)值越小,表示模型的預(yù)測誤差越小。分別對LSTM模型、CNN-LSTM模型和基于注意力機制的CNN-LSTM模型的時間、橫坐標、縱坐標和豎坐標進行誤差定量分析,結(jié)果如表2所示。
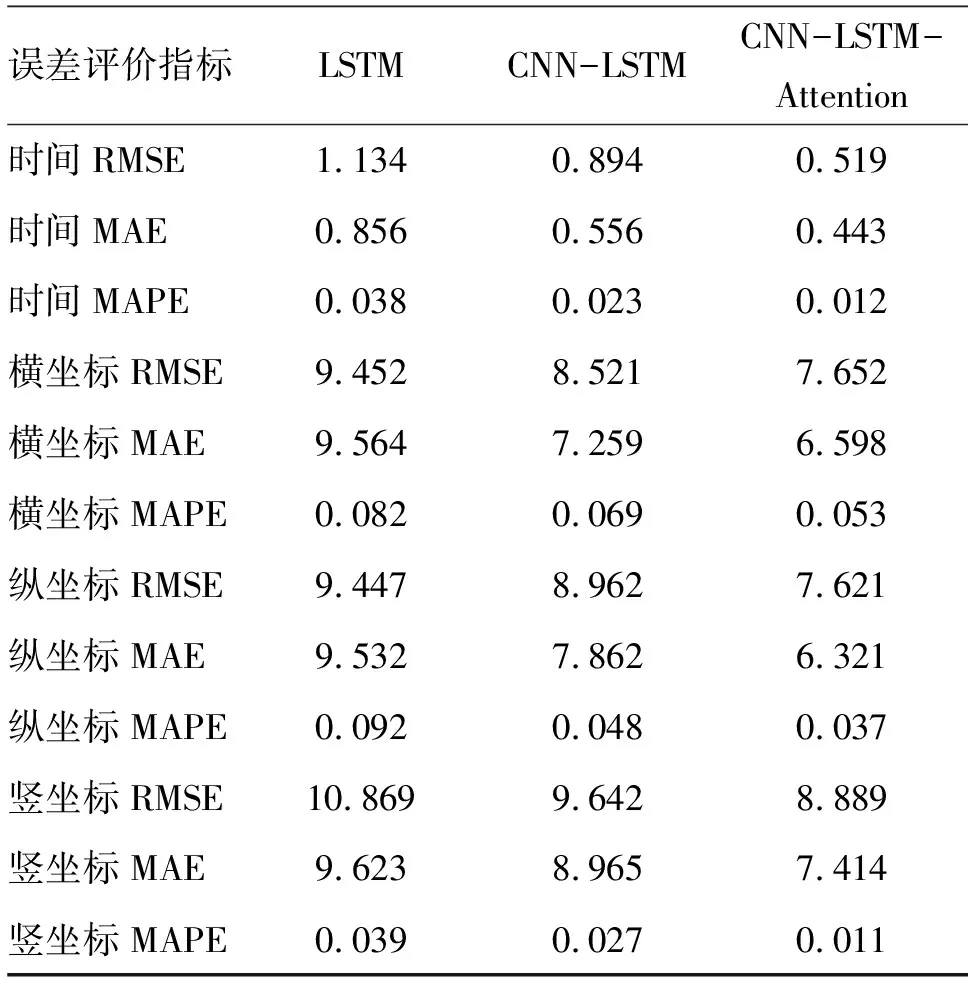
表2 特征誤差對比
通過對比表2中的參數(shù)發(fā)現(xiàn),LSTM的特征誤差最大,CNN-LSTM的特征誤差次之,誤差最小的是CNN-LSTM-Attention模型。CNN-LSTM-Attention模型在時間、橫坐標、縱坐標和豎坐標的誤差指標均小于CNN-LSTM模型,其中降低最多的是時間特征,誤差平均降低36.70%;降低最少的是橫坐標特征,誤差平均降低14.16%,以上數(shù)據(jù)說明了Attention機制應(yīng)用CNN-LSTM后,提高了模型的預(yù)測能力,同時驗證了CNN-LSTM-Attention模型在處理時序預(yù)測問題的優(yōu)越性能。
4 結(jié)語
本文首先提出了基于注意力機制的CNN-LSTM混合模型,將注意力機制引入CNN-LSTM模型中,對LSTM隱藏層的輸出賦予注意力權(quán)重,提高模型預(yù)測精度,介紹了模型的整體框架、模型的輸入與輸出和模型的訓(xùn)練流程。然后介紹了數(shù)據(jù)預(yù)處理工作,包括制作數(shù)據(jù)集、數(shù)據(jù)樣本構(gòu)造和樣本歸一化處理。最后,進行了實驗與結(jié)果分析,其中包括模型訓(xùn)練、誤差衡量指標介紹、定性實驗與定量實驗。實驗通過將預(yù)測航跡和真實航跡以二維與三維的形式繪制航跡,直觀地展示出航跡之間的誤差;定量實驗通過誤差評價指標RMSE、MAE、MAPE定量展示航跡的誤差。通過定性實驗與定量實驗的比較,驗證了本文所提出的模型在4D航跡預(yù)測上的性能優(yōu)于其它對比模型。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19