四元數(shù)在工業(yè)機(jī)器人編程操作中的應(yīng)用
2023-12-26 04:46:50程福
智能制造 2023年6期
程福
(北京城市學(xué)院信息學(xué)部,北京 101300)
1 引言
相對(duì)于旋轉(zhuǎn)矩陣、歐拉角、旋轉(zhuǎn)向量等機(jī)器人姿態(tài)描述方法,四元數(shù)因其具有能夠?qū)崿F(xiàn)平滑插值、避免萬(wàn)向節(jié)死鎖等優(yōu)點(diǎn),被廣泛應(yīng)用于機(jī)器人末端操作器(工具)的姿態(tài)規(guī)劃中[1-2]。目前廣泛應(yīng)用的基于四元數(shù)的姿態(tài)插補(bǔ)算法主要有球面線性插值 (Spherical Linear Interpolation,SLERP) 和球面立體插值 (Spherical and Quadrangle,SQUAD)[3]。SLERP 算法計(jì)算簡(jiǎn)單,可以高效地實(shí)現(xiàn)兩姿態(tài)間的平滑插值。
由于應(yīng)用四元數(shù)能夠確保工具在三維空間中姿態(tài)變換的平滑性,其在工業(yè)機(jī)器人研發(fā)中得到了深入的研究和廣泛的應(yīng)用,但介紹四元數(shù)應(yīng)用于機(jī)器人編程操作的公開(kāi)文獻(xiàn)并不多見(jiàn)[4-5]。在機(jī)器人的編程操作時(shí),可以應(yīng)用四元數(shù)實(shí)現(xiàn)工具角位移的精確度和重復(fù)精度的準(zhǔn)確檢測(cè),也可以進(jìn)行直線運(yùn)動(dòng)軌跡的姿態(tài)規(guī)劃。
2 四元數(shù)用作姿態(tài)描述和旋轉(zhuǎn)變換
2.1 四元數(shù)與歐拉旋轉(zhuǎn)定理
四元數(shù)是對(duì)復(fù)數(shù)的擴(kuò)展。四元數(shù)實(shí)質(zhì)上是實(shí)數(shù)、復(fù)數(shù)及三維空間向量的擴(kuò)充,包含一個(gè)實(shí)部和三個(gè)虛部。一個(gè)復(fù)數(shù)表達(dá)式為a+bi。其中,a和b都是實(shí)數(shù),i是單位虛數(shù),i2=-1。一個(gè)四元數(shù)表達(dá)式:q=q1+q2i+q3j+q4k,其中i2=j2=k2=-1,ij=k=-ji,jk=i=-kj,ki=j=-ki,{q1,q2,q3,q4}都是實(shí)數(shù),表示四元數(shù)的四個(gè)組成元素。
四元數(shù)的加法運(yùn)算:如果p={p1,p2,p3,p4} 表示另一個(gè)四元數(shù),則兩個(gè)四元數(shù)加法運(yùn)算:q+p=p+q=(q1+p1)+(q2+p2)i+(q3+p3)j+(q4+p4)k;四元數(shù)的乘法運(yùn)算:qp=(q1p1–q2p2–q3p3–q4p4)+(q1p2+q2p1+q3p4–q4p3)i+(q1p3+q3p1–q2p4+q4p2)j+(q1p4+q4p1+q2p3–q3p2)k。
四元數(shù)的加法滿足結(jié)合律和交換律。但是,四元數(shù)的乘法和矩陣的乘法相類似,只滿足結(jié)合律,不滿足交換律,即qp≠pq。
歐拉旋轉(zhuǎn)定理指出,對(duì)于空間中任意姿態(tài)的坐標(biāo)系,總可以在空間里找到某個(gè)軸,使其中一個(gè)坐標(biāo)系繞軸旋轉(zhuǎn)一個(gè)角度就能與另一個(gè)坐標(biāo)系姿態(tài)重合。所以,坐標(biāo)系在三維空間中的姿態(tài)可以用一個(gè)代表旋轉(zhuǎn)軸的向量u和繞向量u旋轉(zhuǎn)的角度θ來(lái)描述,向量u的方向遵循右手螺旋法則。如果用u與θ描述一個(gè)坐標(biāo)系的姿態(tài),那么-u與-θ,以及-u與 360°-θ分別描述的坐標(biāo)系的姿態(tài)與該坐標(biāo)系的姿態(tài)相同。
工具坐標(biāo)系實(shí)現(xiàn)姿態(tài)變換的旋轉(zhuǎn)軸如圖1 所示,用向量及繞其旋轉(zhuǎn)角度描述坐標(biāo)系在三維空間的姿態(tài)如圖2 所示。如果在關(guān)節(jié)空間圍繞工具中心點(diǎn)(Tool Center Point,TCP)改變工具坐標(biāo)系的姿態(tài),即使繞世界坐標(biāo)系的X,Y,Z軸進(jìn)行多次旋轉(zhuǎn),仍然等效于工具坐標(biāo)系繞經(jīng)過(guò)工具中心點(diǎn)TCP 的一個(gè)向量u旋轉(zhuǎn)角度θ實(shí)現(xiàn)姿態(tài)變換。如果工具中心點(diǎn)TCP 的位置不變,編程人員使用直線移動(dòng)指令改變工具的姿態(tài),大多數(shù)機(jī)器人的控制器會(huì)采用繞經(jīng)過(guò)工具中心點(diǎn)TCP 的一個(gè)向量u旋轉(zhuǎn)角度θ實(shí)現(xiàn)姿態(tài)變換,所應(yīng)用的是基于四元數(shù)的SLERP 軌跡插值法[3]。
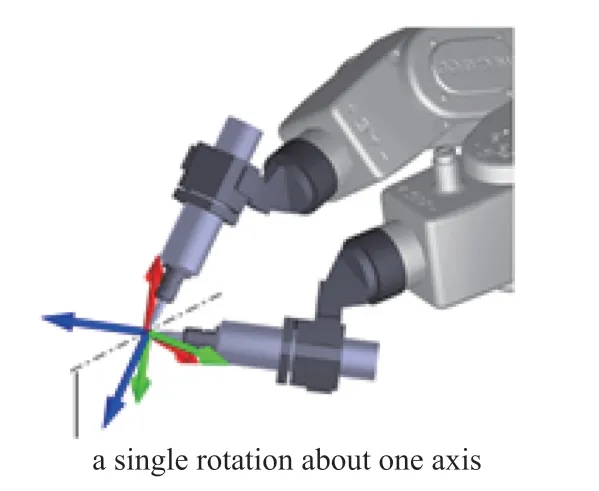
圖1 工具坐標(biāo)系實(shí)現(xiàn)姿態(tài)變換的旋轉(zhuǎn)軸
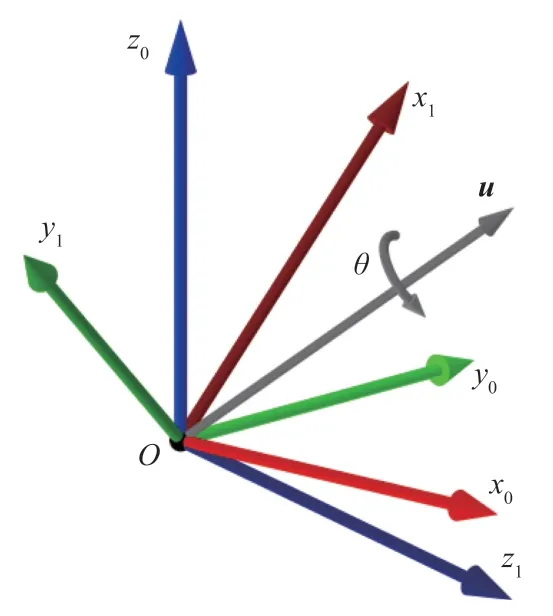
圖2 用向量及繞其旋轉(zhuǎn)角度描述坐標(biāo)系在三維空間的姿態(tài)
2.2 應(yīng)用四元數(shù)描述三維空間的姿態(tài)
對(duì)于單位四元數(shù)q,|q|=q12+q22+q32+q42=1,q可以描述為q={cos(θ/2),uxsin(θ/2),uysin(θ/2),uzsin(θ/2)},其中,ux,uy,uz是向量u三個(gè)互相垂直的主軸的分量,θ是繞向量u旋轉(zhuǎn)的角度。q所描述的姿態(tài)是由于世界坐標(biāo)系姿態(tài)相同的四元數(shù)描述的坐標(biāo)系繞以向量u為軸旋轉(zhuǎn)角度θ變換而來(lái)。所以,僅用u和θ就可以描述坐標(biāo)系在三維空間的姿態(tài)。
使向量u分別代表世界坐標(biāo)系的z、y、x軸,則四元數(shù)描述的坐標(biāo)系繞向量u旋轉(zhuǎn)角度θ變換而來(lái)的姿態(tài)分別如圖3a、3b 和3c 所示。
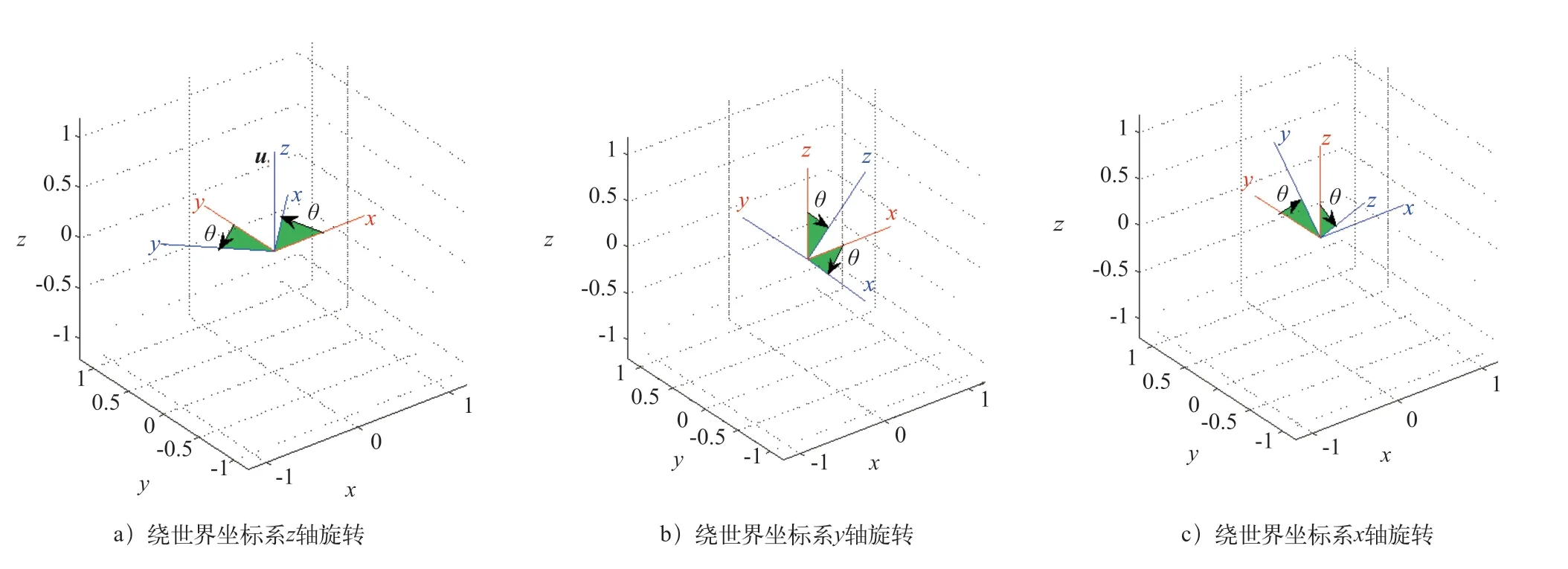
圖3 四元數(shù)描述的坐標(biāo)系繞世界坐標(biāo)系z(mì)、y、x 軸旋轉(zhuǎn)一定角度的姿態(tài)
由于同一個(gè)四元數(shù)描述的姿態(tài)與用繞向量-u旋轉(zhuǎn)360°-θ角度的姿態(tài)相同,即q={cos(180°-θ/2),-uxsin(180 °-θ/2),-uysin(180 °-θ/2),-uzsin(180 °-θ/2)}={-cos(θ/2),-uxsin(θ/2),-uysin(θ/2),-uzsin(θ/2))=-q。所以,一個(gè)四元數(shù)與其四個(gè)組成元素取負(fù)值后的四元數(shù),它們描述的是同一個(gè)姿態(tài)。
2.3 單位四元數(shù)用作旋轉(zhuǎn)變換
如果Rq是3×3 旋轉(zhuǎn)矩陣,其對(duì)應(yīng)的姿態(tài)用四元數(shù)q來(lái)描述,Rp為另一個(gè)四元數(shù)p對(duì)應(yīng)的3×3 旋轉(zhuǎn)矩陣,那么旋轉(zhuǎn)矩陣RqRp與四元數(shù)qp描述的姿態(tài)相同。由于兩個(gè)3×3 旋轉(zhuǎn)矩陣需要經(jīng)過(guò)27 次乘法和10 次加/減法運(yùn)算,而兩個(gè)四元數(shù)相乘只需要經(jīng)過(guò)16 次乘法和12 次加/減法運(yùn)算,所以應(yīng)用四元數(shù)描述姿態(tài)的優(yōu)點(diǎn)是計(jì)算效率較高。
一個(gè)3×3 旋轉(zhuǎn)矩陣的逆矩陣等于其轉(zhuǎn)置矩陣,即Rq-1=RqT。四元數(shù)的求逆運(yùn)算描述的姿態(tài)變換更為直觀,它是由同一個(gè)坐標(biāo)系繞向量u以-θ角度旋轉(zhuǎn)而 來(lái),即q-1={cos(-θ/2),uxsin(-θ/2),uysin(-θ/2),uzsin(-θ/2)}={cos(θ/2),-uxsin(θ/2),-uysin(θ/2),-uzsin(θ/2)}。因此,可以得到q-1q=qq-1={1,0,0,0}。這說(shuō)明,四元數(shù)與其求逆后的四元數(shù)相乘得到的四元數(shù)描述的姿態(tài)與3×3 單位矩陣姿態(tài)相同。
如圖4 所示,如果純四元數(shù)v={0,vx,vy,vz}描述一個(gè)坐標(biāo)系的姿態(tài),單位四元數(shù)q作為坐標(biāo)系姿態(tài)變換的算子,那么,四元數(shù)qvq-1描述的姿態(tài)與四元數(shù)v描述的姿態(tài)相同。
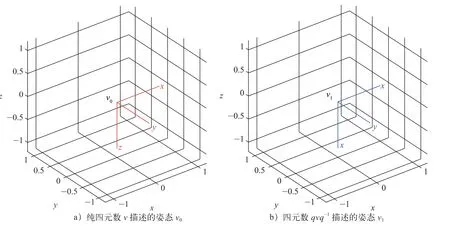
圖4 四元數(shù)qvq-1 描述的姿態(tài)v1 與純四元數(shù)v 描述的姿態(tài)v0 相同
應(yīng)用四元數(shù),可以實(shí)現(xiàn)與應(yīng)用歐拉角法相同的工具坐標(biāo)系的姿態(tài)變換;首先把應(yīng)用歐拉角法實(shí)現(xiàn)姿態(tài)變換的三個(gè)分量角度分別轉(zhuǎn)化為四元數(shù),然后將這三個(gè)四元數(shù)相乘,依據(jù)四元數(shù)乘法的幾何意義則得到表示旋轉(zhuǎn)的四元數(shù)。
設(shè)歐拉角的三個(gè)旋轉(zhuǎn)角度分量分別為,繞z軸旋轉(zhuǎn)α角,繞y軸旋轉(zhuǎn)β角,繞x軸旋轉(zhuǎn)γ角。這三個(gè)旋轉(zhuǎn)角度分量對(duì)應(yīng)的四元數(shù)為qz,qy,qx,則Q表示最終得到的旋轉(zhuǎn)四元數(shù):
2.4 單位四元數(shù)與姿態(tài)變換矩陣的轉(zhuǎn)換
對(duì)于單位四元數(shù),其對(duì)應(yīng)的姿態(tài)變換矩陣為。
3 應(yīng)用四元數(shù)檢測(cè)工具的角位移
等量的歐拉角變化并不一定對(duì)應(yīng)等量的姿態(tài)旋轉(zhuǎn),對(duì)應(yīng)同一個(gè)姿態(tài),歐拉角的角度變化量可以有多組,而且姿態(tài)輕微的改變,歐拉角變換很大。所以,應(yīng)用歐拉角很難準(zhǔn)確評(píng)價(jià)實(shí)現(xiàn)姿態(tài)變換的角位移的精確度和重復(fù)精度;應(yīng)用單位四元數(shù)能夠很容易根據(jù)實(shí)現(xiàn)初始姿態(tài)變換到結(jié)束姿態(tài)的角位移,準(zhǔn)確檢測(cè)出角位移的精確度和重復(fù)精度。
如果q是描述工具坐標(biāo)系在姿態(tài)1 時(shí)的四元數(shù),p是描述工具坐標(biāo)系在姿態(tài)2 時(shí)的四元數(shù),則工具在姿態(tài)2相對(duì)于姿態(tài)1 時(shí)的姿態(tài)用四元數(shù)描述為
式中,wx,wy,wz是單位向量w的分量。公式(1)表明,工具從姿態(tài)q變換到姿態(tài)p,需要繞向量w旋轉(zhuǎn)角度φ,如圖5 所示。為了實(shí)現(xiàn)以最小角度的旋轉(zhuǎn),限定旋轉(zhuǎn)角度范圍為0<φ≤180,因此,如果d的第一個(gè)單元為負(fù)數(shù),則計(jì)算角度φ時(shí)需要將d=—d,即cos(φ/2),以確保總是取d的第一個(gè)單元數(shù)的正值來(lái)計(jì)算角度φ。由公式cos(φ/2)=可以求出旋轉(zhuǎn)角度φ。
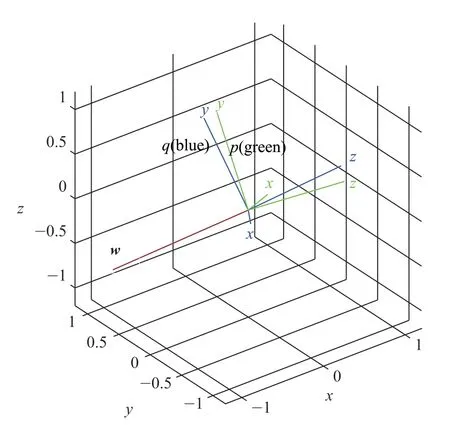
圖5 四元數(shù)q 和p 描述的姿態(tài)在世界坐標(biāo)系中的旋轉(zhuǎn)變換
4 應(yīng)用單位四元數(shù)實(shí)現(xiàn)機(jī)器人工具直線運(yùn)動(dòng)軌跡的姿態(tài)規(guī)劃
盡管以逆時(shí)針和順時(shí)針兩個(gè)方向可以實(shí)現(xiàn)等效的姿態(tài)變換,但以小于180°的角度實(shí)現(xiàn)姿態(tài)變換是最快捷的角度變化路徑,也是驅(qū)動(dòng)轉(zhuǎn)矩最小的角度變化路徑。
為了實(shí)現(xiàn)四元數(shù)q描述的姿態(tài)以等角速度平滑變換到四元數(shù)p描述的姿態(tài),需要應(yīng)用公式(5)描述的球面線性插值SLERP 法得到相等的角度變化量的序列值。
式中,t∈[0,1],t=0 對(duì)應(yīng)四元數(shù)q描述的姿態(tài),t=1 對(duì)應(yīng)四元數(shù)p描述的姿態(tài)。
根據(jù)前述分析,d=q-1p={cos(φ/2),wxsin(φ/2),wysin(-φ/2),wzsin(-φ/2)},球面線性插值法的公式可以視為實(shí)現(xiàn)四元數(shù)q描述的姿態(tài)以等角速度平滑變換到四元數(shù)p 描述的姿態(tài),需要以角度φ旋轉(zhuǎn)次。所以,dt={cos(tφ/2),wzsin(tφ/2),wysin(-tφ/2),wzsin(-tφ/2)}。
如果令t=0,1/n,2/n,…,1,那么,球面線性插值法實(shí)質(zhì)上是通過(guò)每次以相等的旋轉(zhuǎn)角度φ/n,實(shí)現(xiàn)旋轉(zhuǎn)角度為φ的姿態(tài)變換。應(yīng)該注意,要確保φ小于180°。式(6)與式(5)等效,但更便于計(jì)算。式(5)中的每一個(gè)t值,對(duì)應(yīng)一個(gè)四元數(shù)。
如果機(jī)器人的工具中心點(diǎn)TCP 位置不變,只是姿態(tài)發(fā)生變化,可以應(yīng)用球面線性插值法以等角速度實(shí)現(xiàn)初始姿態(tài)平滑變換到結(jié)束姿態(tài),如圖6 所示。
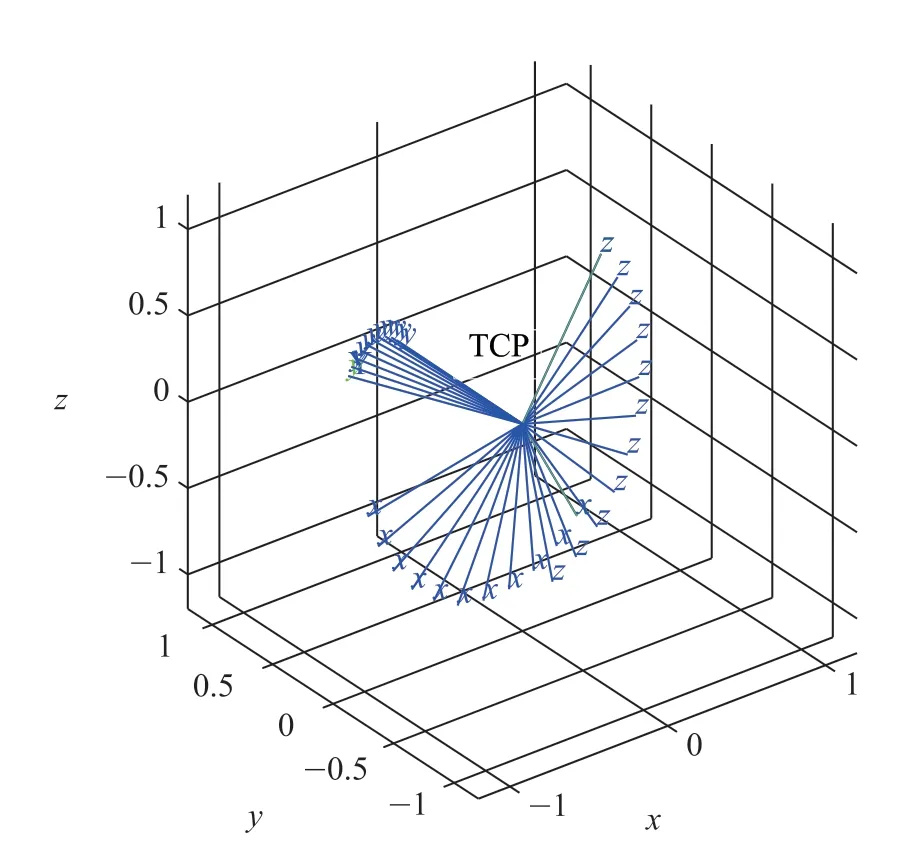
圖6 機(jī)器人的工具中心點(diǎn)位置不變時(shí)姿態(tài)變換過(guò)程
根據(jù)程序6 的計(jì)算出來(lái)的序列姿態(tài),應(yīng)用工業(yè)機(jī)器人編程軟件RoboDK 編程控制ABB 機(jī)器人實(shí)現(xiàn)工具的姿態(tài)變換過(guò)程如圖7 所示[6]。
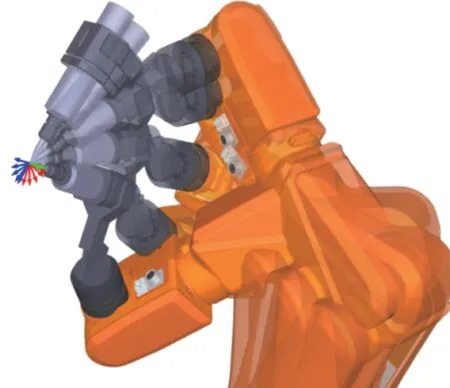
圖7 機(jī)器人在工具中心點(diǎn)位置不變時(shí)姿態(tài)變換過(guò)程
如果機(jī)器人的工具中心點(diǎn)TCP 沿直線運(yùn)動(dòng)過(guò)程中不僅姿態(tài)發(fā)生變化,位置也發(fā)生變化。編程人員為了控制工具沿直線運(yùn)動(dòng)過(guò)程中的姿態(tài)和位置變換,可以應(yīng)用球面線性插值(SLERP)法以等角速度實(shí)現(xiàn)工具從初始姿態(tài)平滑變換到結(jié)束姿態(tài),應(yīng)用式(7)描述的線性插值(LERP)法實(shí)現(xiàn)工具從初始位置經(jīng)過(guò)若干序列點(diǎn)沿直線運(yùn)動(dòng)到結(jié)束位置,如圖8 所示。
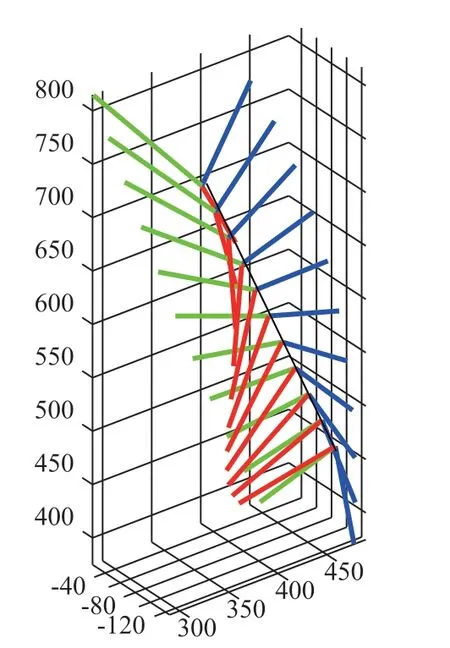
圖8 應(yīng)用SLERP 和LERP 在工具沿直線運(yùn)動(dòng)位姿平滑變換
根據(jù)程序7 的計(jì)算出來(lái)的序列位姿,應(yīng)用工業(yè)機(jī)器人編程軟件RoboDK 編程控制ABB 機(jī)器人實(shí)現(xiàn)沿直線運(yùn)動(dòng)時(shí)工具的姿態(tài)和位置變換過(guò)程如圖9 所示。

圖9 機(jī)器人在工具沿直線運(yùn)動(dòng)位姿平滑變換
5 結(jié)束語(yǔ)
盡管絕大多數(shù)工業(yè)機(jī)器人軟件采用歐拉角法描述機(jī)器人工具的姿態(tài),但在機(jī)器人編程操作中應(yīng)用歐拉角法能夠準(zhǔn)確地檢測(cè)工具角位移的精確度和重復(fù)精度。編程操作人員應(yīng)用四元數(shù)法不僅能夠準(zhǔn)確地檢測(cè)工具角位移的精確度和重復(fù)精度,也可以根據(jù)操作任務(wù)要求(例如,要求以驅(qū)動(dòng)轉(zhuǎn)矩最小的角度變化路徑進(jìn)行姿態(tài)變換)重新進(jìn)行機(jī)械臂工具的姿態(tài)規(guī)劃。
