一種多功能智能垃圾桶設計與實現(xiàn)
2023-12-26 12:47:34陳廣振李孟珍劉明亮朱欽龍
黑龍江大學工程學報 2023年4期
陳廣振,李孟珍,劉明亮,*,王 偉,朱欽龍
(1.黑龍江大學 電子工程學院,哈爾濱 150080;2.黑龍江省氣象數(shù)據(jù)中心,哈爾濱 150030)
0 引 言
垃圾分類是對綠色低碳生活方式的重要踐行,也是實施“雙碳”國家戰(zhàn)略的重要任務[1]。隨著國家垃圾分類政策的普遍實施和人民環(huán)保意識的不斷提升,實行垃圾分類是大勢所趨[2-3]。垃圾分類處理的流程是一個綜合體系,包括前端的垃圾分類投放、中端的垃圾運輸和末端的垃圾處理,任何一個環(huán)節(jié)的缺失都會影響整個垃圾分類體系,形成惡性循環(huán)效應[4]。特別是前端的垃圾分類投放環(huán)節(jié),它是整個垃圾分類過程的核心,然而垃圾種類繁多、分類規(guī)則復雜等問題給其帶來了一定的挑戰(zhàn)。同時隨著垃圾分類政策推行時間的延續(xù),人們的關注度也隨之降低,如何培養(yǎng)人們長期參與垃圾分類的意識和習慣,建立垃圾分類長效機制是城市治理領域亟待解決的重要問題[5]。然而作為投放垃圾的主要容器,現(xiàn)有的垃圾桶結構簡單,功能單一,更新迭代較為滯后[6-7],通常需要先自行對垃圾分類后再進行投擲或存在找不到垃圾桶、距離垃圾桶位置較遠等問題。本文設計的多功能智能垃圾桶具有垃圾的自動分類功能,并通過語音方式實現(xiàn)了人與垃圾桶的有效互動以及對垃圾桶智能移動的控制,有助于垃圾的正確分類投放,具有一定的應用價值。
1 系統(tǒng)方案設計
設計的智能垃圾桶是面向家庭、辦公室等場景使用,垃圾桶功能結構見圖1。垃圾桶可對投入的垃圾進行識別分類,并將識別結果和對應垃圾種類通過語音播報和屏幕顯示兩種方式呈現(xiàn)給用戶,同時垃圾桶將自動把分類后的垃圾送入相應類別桶中;用戶可通過語音方式對垃圾桶進行控制,垃圾桶將根據(jù)不同語音命令自主導航至相應地點并作出語音反饋,在移動過程中垃圾桶可以自動避開路徑上的障礙物。
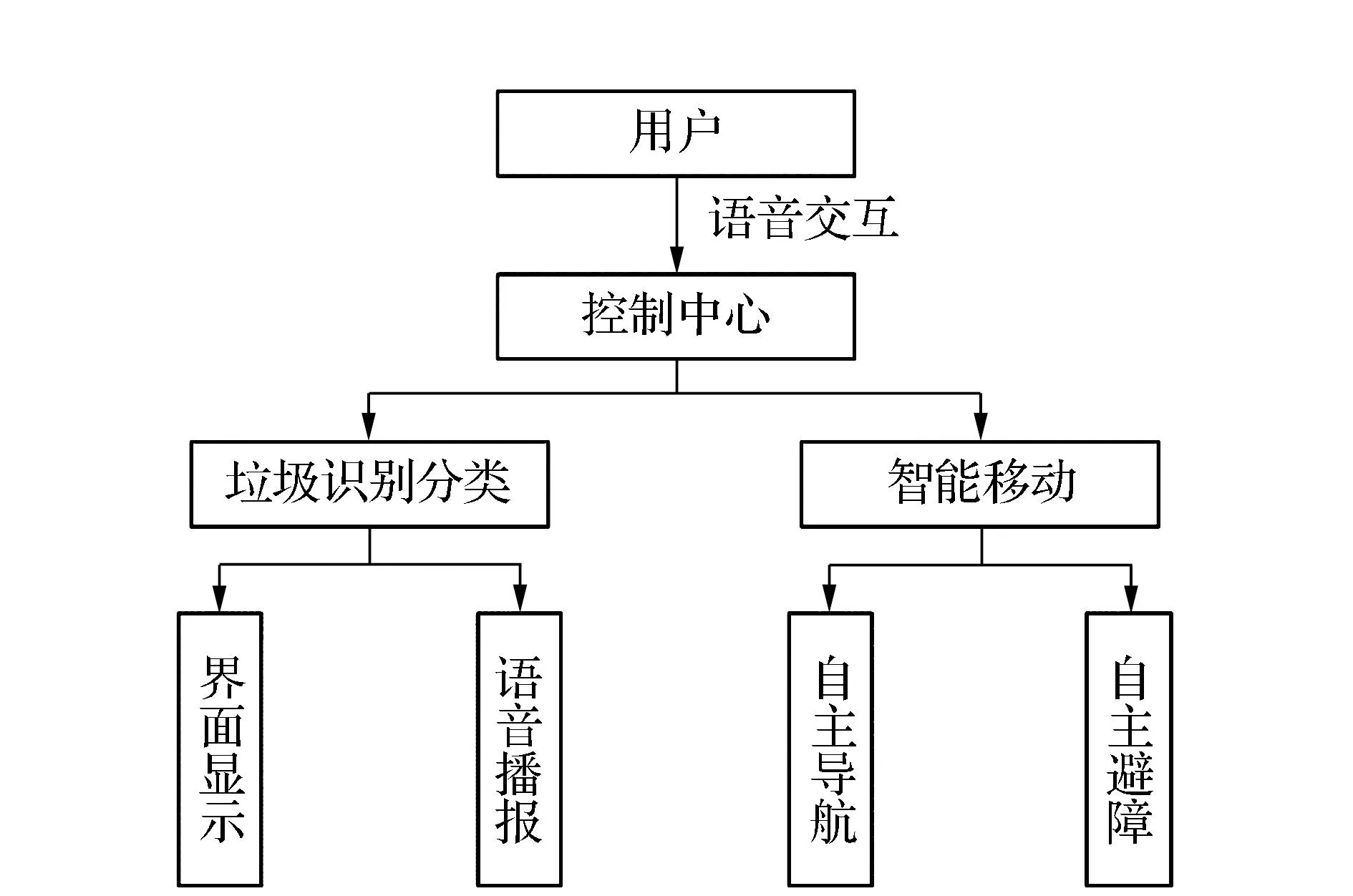
圖1 垃圾桶功能結構Fig.1 Functional structure of trash can
2 硬件系統(tǒng)設計
硬件系統(tǒng)架構見圖2。設計選用Raspberry Pi 4B作為系統(tǒng)的控制中心,其以Linux作為操作系統(tǒng),搭載4核 Cortex-A72處理器,內存大小為4 GB,擁有兩個USB3.0和兩個USB2.0接口,傳輸速率快,算力強大,可擴展性強,滿足設計要求。Raspberry Pi 4B控制STM32F407等其他硬件設備實現(xiàn)垃圾分類、語音交互以及智能移動等功能。
2.1 分類硬件設計
設計采用OV5642攝像頭進行圖像采集,其支持最大以2 592×1 944分辨率輸出RGB、YUV422和JPEG等格式圖像,可通過CSI接口將采集到的圖像傳輸至Raspberry Pi 4B進行識別,識別種類在LCD液晶屏上進行顯示以及通過語音方式進行播報。使用3ds Max軟件對垃圾桶分類結構進行設計,分類結構見圖3。設計的垃圾桶外觀形狀與傳統(tǒng)垃圾桶相似,直徑為32 cm,高度為40 cm。桶內通過十字型結構劃分為4個區(qū)域,分別對應可回收物、廚余垃圾、有害垃圾和其他垃圾。十字型結構正上方連接著可以旋轉的垃圾分離結構,垃圾分離結構的旋轉通過兩個舵機來完成,主舵機位于十字型結構與垃圾分離結構下半部分之間,負責將整個垃圾分離結構旋轉至不同垃圾區(qū)域上方;副舵機通過扇形結構連接垃圾分離結構上半部分,轉動時可將垃圾送入相應類別桶中。考慮到旋轉角度、精度以及旋轉扭矩等要求,主副舵機均采用LD-27MG型號金屬數(shù)字舵機。LD-27MG舵機可通過PWM脈沖信號控制,具有20 kg的超大扭力,能實現(xiàn)270°大角度轉動,轉動精度高且響應速度快,保證了分類的準確性和快速性。

圖3 垃圾桶分類結構Fig.3 Classification structure of trash can
2.2 語音交互硬件設計
設計采用M160C語音模塊實現(xiàn)人與垃圾桶的交互功能。M160C語音模塊板載Linux系統(tǒng),可直接與同為Linux系統(tǒng)的Raspberry Pi 4B通過USB自定義通信協(xié)議進行通信,基于這些協(xié)議,在Raspberry Pi 4B端設置語音模塊開機、獲取音頻等操作。
當用戶發(fā)出語音指令時,M160C語音模塊對其進行輸入捕捉后送入離線識別引擎中進行語音識別,根據(jù)識別到的文本命令進行邏輯處理,最后對生成的回復文本實現(xiàn)語音合成。
2.3 移動硬件設計
Raspberry Pi 4B作為控制中心通過串口通信方式連接LSN10激光雷達和STM32F407微控制器,控制中心負責相關數(shù)據(jù)的接收處理以及命令的發(fā)送,從而控制垃圾桶的導航和移動。
LSN10激光雷達主要負責構建垃圾桶周圍環(huán)境的實時二維地圖,其采用TOF(time of flight)方案,能夠對周圍360°環(huán)境進行二維掃描探測,其內部使用無線供電和光通訊,測量重頻為4.5 kHz,輸出數(shù)據(jù)分辨率達15 mm,探測精度達到3 cm,最大量程為12 m,使用壽命超過30 000 h,支持ROS系統(tǒng)。
STM32F407微控制器主要負責接收和執(zhí)行Raspberry Pi 4B下發(fā)的運動控制命令以及上傳相關傳感器信息至Raspberry Pi 4B,具有性價比高、性能強大以及外設資源豐富等優(yōu)點。采用MPU6050慣性測量單元進行垃圾桶加速度、角速度的采集,L298N電機驅動器實現(xiàn)MG513直流減速電機的驅動,MG513直流電機位于垃圾桶底部且連接著麥克納姆滾動輪,用于實現(xiàn)垃圾桶快速精確的移動。
3 軟件系統(tǒng)設計
3.1 垃圾分類程序設計
通過OV5642攝像頭采集不同種類的垃圾圖片構建數(shù)據(jù)集,數(shù)據(jù)集涵蓋了可回收物、其他垃圾、廚余垃圾與有害垃圾,包含日常生活中常見的紙片、電池、口罩、西瓜皮、煙蒂、廢紙、塑料袋等30類垃圾,經(jīng)數(shù)據(jù)增強[8]后共3 570張圖片,每張圖片分辨率為224×224。數(shù)據(jù)集樣例見圖4。

圖4 數(shù)據(jù)集樣例圖片F(xiàn)ig.4 Sample pictures of dataset
使用MobileNetV3[9]模型實現(xiàn)對垃圾的分類。MobileNet是一種輕量化卷積神經(jīng)網(wǎng)絡,輕量化卷積神經(jīng)網(wǎng)絡廣泛用于無人駕駛、移動端、物聯(lián)網(wǎng)的邊緣計算和人工智能算法部署[10-12]。MobileNetV3作為MobileNet模型的第三代版本,不僅結合了前兩代的深度可分離卷積、殘差連接等優(yōu)點,而且升級了非線性激活函數(shù),加入了注意力機制,使模型精度和速度都有了一定的提升。
使用構建的數(shù)據(jù)集,基于Pytorch框架搭建MobileNetV3網(wǎng)絡模型,訓練環(huán)境基于谷歌公司的Google Colab平臺,其中GPU為Tesla T4,顯存大小為16 G。訓練集與測試集比例設置為7∶3,初始學習率設置為0.000 1。經(jīng)過500次迭代后訓練完成,測試集準確率達到了98.7%,模型較好地完成了垃圾分類任務。
垃圾經(jīng)過識別分類后,需要控制舵機轉動從而聯(lián)動相應機械結構來實現(xiàn)垃圾入桶。舵機的轉動通過調整PWM(脈沖寬度調制)信號的占空比實現(xiàn),輸入脈沖信號范圍是0.5~2.5 ms,4種垃圾入桶時與PWM信號、舵機角度的對應關系見表1。由表1可見,不同垃圾入桶時主舵機轉動不同角度,副舵機固定轉動90°即可。
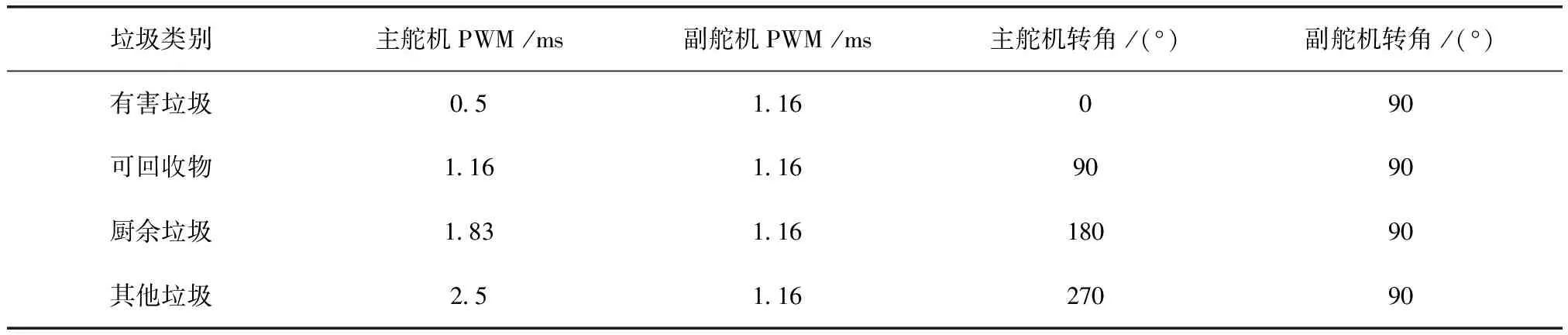
表1 PWM信號與舵機角度的對應關系
3.2 語音交互程序設計
語音交互相關參數(shù)包括喚醒詞、命令詞和回復語。喚醒詞負責開啟垃圾桶的語音交互功能,命令詞負責啟動不同的導航移動任務,回復語則作為一種反饋,用于判斷喚醒詞或命令詞是否被識別。
設計將喚醒詞設置為“小桶小桶”。命令詞的設置與垃圾桶具體的導航任務有關,不同命令詞對應不同的導航任務,同時對應不同的回復語。
例如,用戶說出命令詞“前往桌子”,垃圾桶將會回復“馬上到達桌子”,同時M160C語音模塊會將識別到的命令詞傳輸給Raspberry Pi 4B控制中心進行語音參數(shù)匹配,匹配成功后,控制中心將會執(zhí)行導航去桌子位置的相關程序。用戶可根據(jù)使用需求設置不同的命令詞,命令詞默認設置為“前往桌子”“前往窗臺”和“回到起點”3種。
3.3 智能移動程序設計
垃圾桶移動部分的程序設計基于ROS(Robot Operating System)完成。ROS是開放源代碼(OSS)的機器人應用程序架構,其以UNIX系列操作系統(tǒng)的Ubuntu 作為標準環(huán)境,被廣泛應用到全球機器人的研究開發(fā)領域[13-15]。ROS不可獨立運行,需要搭載在其他操作系統(tǒng)上開發(fā),設計選用基于Linux的Ubuntu 18.04操作系統(tǒng),其可運行于控制中心Raspberry Pi 4B上。
為實現(xiàn)垃圾桶自主導航移動,設計選擇Gmapping算法進行建圖。Gmapping算法在構建小場景地圖時所需的計算量較小且精度較高,對雷達頻率要求低且魯棒性好[16],符合應用環(huán)境要求,使用激光雷達運用Gmapping算法構建的一個封閉環(huán)境下的二維地圖(圖5)。黑色代表封閉環(huán)境中的桌子、沙發(fā)和一些障礙物,左下角白色物體代表垃圾桶。通過Gmapping算法建立好環(huán)境地圖后,結合激光雷達、IMU、里程計等傳感器信息,采用Amcl濾波定位算法、Astar全局路徑規(guī)劃算法以及TEB局部路徑規(guī)劃算法實現(xiàn)垃圾桶的自主導航及避障功能。

圖5 環(huán)境地圖Fig.5 Environmental map
可通過ROS平臺可視化工具Rviz中的“2D Nav Goal”按鈕在地圖上進行移動位置的標定,標定后會生成相應位置的坐標以及角度信息(圖6),每個移動位置信息與語音命令中的命令詞對應。
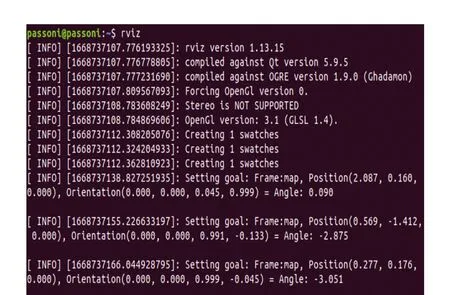
圖6 位置坐標和角度Fig.6 Position coordinates and angles
4 實驗驗證與分析
垃圾桶實物見圖7。基于垃圾桶實物分別對垃圾識別分類、語音交互以及垃圾桶的智能移動功能進行測試與分析。
圖7 垃圾桶實物Fig.7 Real picture of trash can
4.1 垃圾識別分類測試
使用訓練好的MobileNetV3網(wǎng)絡模型對收集的30種433個垃圾進行識別分類,并將識別結果在8 cm LCD液晶屏上進行顯示,部分結果見圖8。垃圾的識別分類準確率見表2。由表2可見,垃圾的平均識別率達到了98.1%,識別效果與訓練測試時基本保持一致,該智能垃圾桶實現(xiàn)了垃圾分類功能。
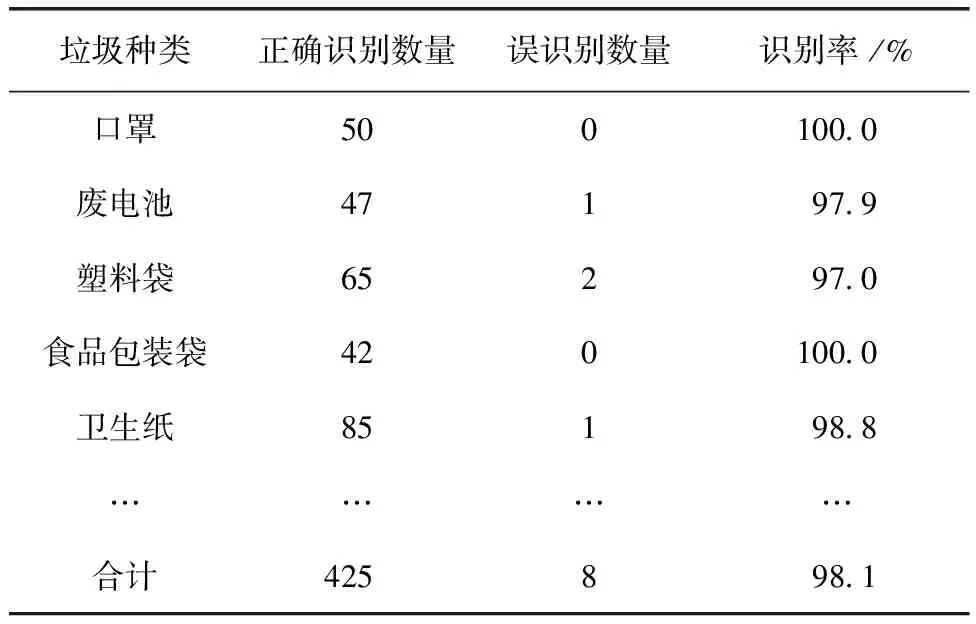
表2 識別分類準確率

圖8 識別分類結果顯示Fig.8 Display of recognition and classification results
4.2 語音交互及智能移動測試
分別在30~40 dB較為安靜環(huán)境和50~60 dB相對嘈雜環(huán)境下對4種語音指令進行識別測試,若垃圾桶能播報出正確回復語即判定本次語音識別成功,播報錯誤或無反應則判定本次語音識別失敗。對每個語音指令分別進行100次測試,同時記錄識別成功情況下的移動準確率即垃圾桶能否按照語音指令到達指定位置,測試結果見表3。測試結果表明,在兩種環(huán)境下每個語音指令的識別率均在86.0%以上,雖然嘈雜環(huán)境下的平均識別率相較安靜環(huán)境降低了4.0%,但平均識別率仍然達到了較高的88.0%,平均移動準確率也達到了97.6%,結果表明,垃圾桶較好實現(xiàn)了語音交互和智能移動功能。

表3 語音指令識別率
5 結 論
基于現(xiàn)有垃圾分類現(xiàn)狀及發(fā)展需求,利用人工智能技術設計了一款多功能智能垃圾桶。測試結果表明,該智能垃圾桶具有較高的垃圾識別準確率、語音指令識別率和移動準確率。相比于傳統(tǒng)垃圾桶,該智能垃圾桶可自動對投擲的垃圾進行識別分類,較高的垃圾識別率解決了垃圾分類知識缺乏以及分類結果不準確等問題;通過簡單的語音命令詞實現(xiàn)了與垃圾桶的語音交互,該智能垃圾桶為垃圾桶的發(fā)展提供了新的思路,有利于資源的優(yōu)化整合和回收利用,具有很好的市場價值和發(fā)展前景。
猜你喜歡
數(shù)學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
中學生數(shù)理化·七年級數(shù)學人教版(2019年4期)2019-05-20 10:06:32
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
藝術啟蒙(2018年7期)2018-08-23 09:14:18
中學生數(shù)理化·七年級數(shù)學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
海峽姐妹(2017年7期)2017-07-31 19:08:17