新型重載列車移動閉塞系統設計及關鍵技術研究
2023-12-26 06:30:30熊飛
鐵道貨運 2023年12期
熊飛
(中國鐵路設計集團有限公司 電化電信工程設計研究院,天津 300308)
我國貨運鐵路移動閉塞系統研究主要是以軌旁設備為核心,基于無線通信的列車運行控制系統,早在2014年就開始基于車車追蹤的重載鐵路移動閉塞系統關鍵技術和裝備研究,并引入了慣性導航(以下簡稱“慣導”)/衛星組合的導航系統,作為新的定位和測速方案。目前移動閉塞系統在重載鐵路大型車站中相關應用[1]、重載鐵路移動閉塞降級系統[2]、基于LTE技術重載鐵路移動閉塞通信系統[3]等方案,都在朔黃鐵路(神池南—黃驊港)通過測試且應用情況較好。但這些研究都建立在CTCS-3級列控系統架構之上,基于LTE網絡實現車地雙向通信,但沒有考慮到貨運鐵路列控系統對列車自動駕駛(Automatic Train Operation,ATO)、北斗衛星導航系統、數字孿生技術、5G-R通信網絡等相關復雜需求。
為彌補上述不足,提出以北斗衛星導航系統為基礎的、基于5G-R通信網絡、具備ATO功能的重載列車移動閉塞系統(以下簡稱“TBTCHY-3系統”),其具備ATO新特性,且系統運維采用數字孿生技術。ATO多用于城際鐵路和市域鐵路中,我國對ATO應用于重載鐵路的研究較少。目前已開通的具有城市軌道交通列車運行控制系統且能實現自動駕駛功能的主要有2種制式:一種是基于通信的列車控制系統(Communication Based Train Control,CBTC),ATO系統作為ATC系統的子系統;另一種是基于CTCS-2/3級列控系統并增加ATO功能。TBTCHY-3級重載列車控制系統是基于CTCS-3級列控系統并增加了ATO功能。基于此,分析TBTCHY-3系統組成,設計適用于貨運鐵路的ATO功能,以更好推動貨運鐵路產業體系升級發展。
1 系統組成
與以軌旁設備為核心的移動閉塞相比較,TBTCHY-3系統承接了《高速鐵路ATO系統總體暫行技術規范》(鐵科信[2019]21號)、朔黃鐵路重載移動閉塞的階段性實驗成果,借鑒了CTCS-3列控系統架構,使用北斗衛星導航系統作為列車定位和測速測距,同時包含了貨運列車所需的ATO部分功能。
地面設備由控制中心、設備集中站設備、軌旁設備構成。控制中心主要包括列控中心(Train Control Center,TCC)、調度集中系統(Centralized Traffic Control,CTC)、臨時限速服務器(Temporary Speed Restriction Server,TSRS)、無限閉塞中心(Radio Block Center,RBC)、數據記錄服務器;設備集中站設備主要包括聯鎖(Computer Interlocking,CI)、CTC車站設備、RBC、5G網絡設備;軌旁設備包括信號機、道岔、軌道占用(檢查)設備、無源應答器,以及傳輸車-地雙向數據的5G基站。車載設備由車載主機(ATP柜、車載5G-R設備)、天線和應答器傳輸模塊(BTM)、速度傳感器、雷達傳感器、人機交互設備(MMI)、車載記錄器等構成,TBTCHY-3級系統結構如圖1所示。
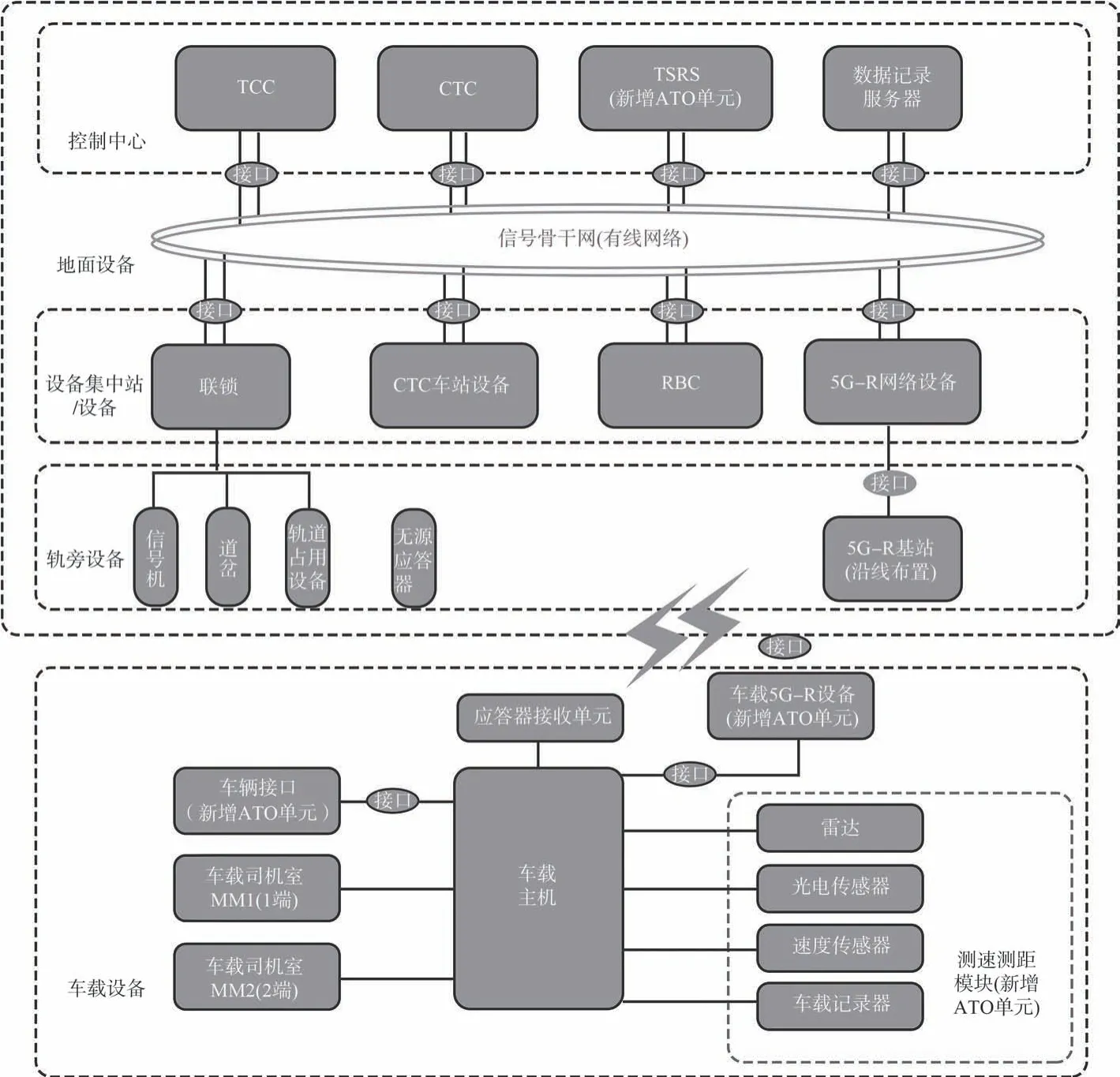
圖1 TBTCHY-3級系統結構Fig.1 Structure of TBTCHY-3 level system
TBTCHY-3級系統在TSRS新增ATO單元,并在CTC中心增加接口服務器與TSRS進行數據交互。RBC、CI、軌道占用檢查設備維持CTCS-3級不變[4]。TBTCHY-3級系統車載設備通過超可靠、超低時延的5G-R通信網絡,與CI,RBC,CTC之間信息傳輸,并對軌旁設備進行控制。系統采用的5G-R通信網絡是基于網絡功能虛擬化(Network Function Virtualization,NFV)和軟件定義網絡(Software Defined Network,SDN)的網絡架構[5-6],采用NFV架構優勢是用軟、硬件解耦及功能抽象,使得技術升級不依賴于新的網絡設備,降低了造價和管理難度;采用SDN架構的優勢是數據面和控制面分離,使網絡控制更靈活有效,避免數據擁塞,并且能和“云計算”結合,如部署于SDN控制器上的網絡應用軟件,亦能部署于“云計算”虛擬機中。NFV應用于OSI模型的4至7層,SDN應用于OSI模型的2至3層。NFV與SDN兩者相互補充,且互不依賴,兩者各自發揮作用,使5G-R 網絡更智能,同時降低成本。
2 系統關鍵技術
基于TBTCHY-3系統組成的研究,對TBTCHY-3系統的導航系統、地面應答器進行設計,列車定位和測速采用慣導/衛星組合系統(以下簡稱“組合導航系統”)作為主要手段,應答器作為輔助手段。應答器系統作為組合導航系統的補充,主要用于因密林、隧道等遮擋失去衛星信號的列車定位。當衛星信號丟失時,組合導航系統僅以慣導模式工作,直至衛星信號恢復。組合導航系統信息恢復后,TBTCHY-3級系統按照預先設置的中斷事件參數重新對準,并計算位置、速度、加速度、距離。
2.1 基于北斗衛星的組合導航系統
組合導航系統車載設備由慣性測量單元(Inertial Measurement Unit,IMU)、慣導主機、北斗衛星導航接收模塊、組合計算機4部分組成,組合導航系統的車載組成如圖2所示。地面設備由地面差分站、地面接收天線組成。組合導航系統車載設備與車載控制器(Vehicle on-board controller,VOBC)設備的接口安裝于機車上。地面差分站與信號機械室合設,通過5G-R網絡實現差分站鏈路。地面接收天線設于既有無線列調鐵塔上或信號房屋頂部。
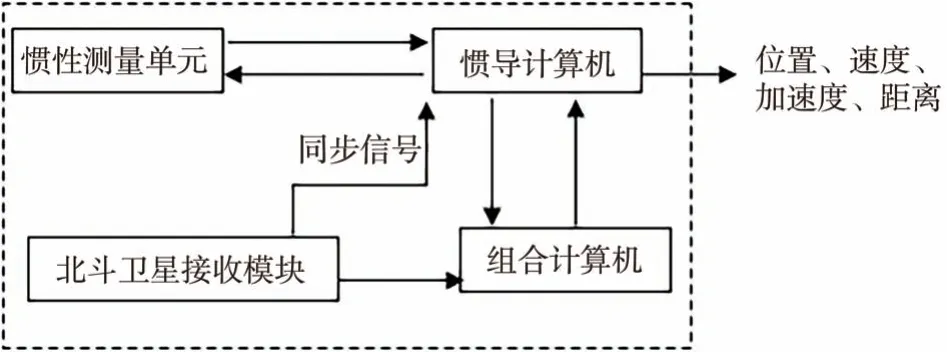
圖2 組合導航系統的車載組成Fig.2 On-board composition of integrated navigation system
組合導航系統可細分為以下3個功能。
(1)實時提供列車頭部衛星定位信息。當組合導航系統設置為組合模式時,系統上電后向衛星導航板卡輸出存儲的位置信息(根據需求),北斗衛星信號到來前,按一定頻率采集IMU數據,通過加速器(指測量線性加速度的一種傳感器)數據判斷列車是否為持續靜態,并將靜態位置信息持續保存,為車載的衛星導航板卡解析并初次與北斗衛星導航系統對準位置信息,提供基礎數據。當衛星信號丟失,組合導航系統僅按照慣導模式工作,直至北斗衛星導航系統信號恢復或車載設備通過應答器數據獲得定位位置信息為止;當北斗衛星導航系統信號恢復后組合導航系統與北斗衛星導航系統重新對準位置信息或直接耦合位置信息,并在經過下一個應答器時,按應答器預先寫入的信息再次校正導航系統中的位置信息。
(2)對機車載體姿態、速度、位置的測量。作為新的速度傳導系統,組合導航系統不依賴其他設備,獨立完成列車測速、測距功能,突破既有的速度傳感器和雷達的測速方案,新的速度傳導系統能輔助列車測速,并判斷車輪是否空轉或打滑。
(3)列車完整性檢查。此功能需要通過具有定位功能的可控列尾配合實現,TBTCHY-3級系統檢查通過組合導航系統設備和可控列尾,實時獲取列車首尾的定位信息。發車前,司機通過MMI輸入當前列車的種類、列車車輛編組數目、車長等信息,車長是經由車載系統自動換算成整列車的長度。在非隧道區域場景下,列尾設備將周期性獲得的衛星定位信息通過5G-R網絡發送給車載設備,車載設備通過可控列尾獲得的定位信息與車載主機獲得的衛星定位信息比較,計算出頭車坐標到列尾坐標的距離|DA|,正常情況下,|DA|的值應小于車長、車頭BD模塊定位誤差、車尾BD模塊定位誤差、完整性判斷余量4部分的和值;否則,系統認為列車已經解編或失去完整性,出于安全考慮,系統將采取緊急制動停車且不能緩解。在隧道區域場景下,通過北斗衛星向車頭車尾以發送北斗短報文的方式檢查列車完整性時,需要先保證隧道內整個網絡覆蓋。工程上是通過基站結合光纖直放站、泄露電纜等方式進行網絡覆蓋;如遇到連續隧道的應用場景,在相鄰的隧道之間,采用小區合并技術,多個射頻拉遠單元(Remote Radio Unit,RRU)能復用1個小區,達到減少隧道間切換,保證信號傳輸質量。在隧道覆蓋中,常用方案是信源設備通過多系統接入平臺(Point Of Interface,POI)合路,然后將合路后的信號分到室外天線或饋入漏纜中,同時采用上下行分纜方式,增加纜與纜之間的空間隔離距離,同時充分考慮隧道避車洞的分布位置、上端站的位置,合理組網,并在隧道口設置多頻外延天線,以解決隧道口信號強度覆蓋弱的問題,保障整個網絡連續覆蓋[7]。
2.2 地面應答器設置方案
在西部鐵路或者較空曠區域,組合導航系統向VOBC實時輸出列車頭部的位置,實現車車追蹤功能,應答器設置可間隔距離較大,采用如下方案。
(1)在隧道口的始端和末端,及區間每1 km設置1個定位應答器,作為該系統定位的校正和補充。
(2)在信號機外方布置2個無源定位應答器,用途是目視行車模式下,列車通過該信號機時能獲得位置信息,且前方信號機為開放狀態時,系統通過5GR網絡接收到RBC行車許可,然后自動升級為完全監控模式。
(3)站臺(裝車臺)兩端位置各設1個無源應答器,用于停車前最后一次精確位置校正。站臺中適當位置(距離端部無源應答器200 m)各設置1個無源應答器,列車提前接收到停車位置信息,以實現貨運列車控制系統 ATO精確定位功能。
3 系統新增ATO特性
在車載設備中,TBTCHY-3級系統運用成熟的ATP硬件,并在此基礎上結合重載列車的使用需求,針對ATO子系統功能進行設計與新增。
3.1 牽引和制動
現有的CTCS-2/3+ATO系統中,動車組車載設備和ATO子系統之間經由多功能車輛總線(Multifunction Vehicle Bus,MVB)實現數據通信,ATO子系統分級控制,定速巡航時,列車會在牽引、制動2個狀態間頻繁切換。由于重載列車普遍車長較長,制動距離相對較大時,且制動后又不能快速緩解制動,這樣在切換過程中導致列尾風壓不足,嚴重時導致重載列車制動力不足,進而危及行車安全;另外重載列車在牽引力施加時,車鉤突然從壓縮狀態轉變為拉伸狀態,容易導致出現車鉤斷鉤問題;為此,在施加牽引力的過程中需要逐步順滑加載[8]。因此,在保證安全的前提下,ATO車載設備根據地面設備提供的運行計劃,結合列車的實際運行情況、線路條件(線路速度、線路坡度、曲線半徑等)合理牽引和制動。
3.2 精確定位
ATO子系統控制列車停車功能,即列車精確定位功能。地面設備,如股道中間需增加精準定位應答器,考慮到重載列車運營方式和城際鐵路有較大區別,相比于城際鐵路ATO子系統需要站臺精確停車并聯動屏蔽門的應用場景,TBTCHY-3級系統的ATO子系統對停車精度的要求相對不高。基于成本、人工、施工改造難易程度的考慮,可減少股道中間的精確定位應答器個數。
3.3 列車運營計劃接收與執行
ATO子系統通過司機輸入的車次號,自動請求列車編組、轉換車長、總重量等信息用于控車,司機只負責核對該編組信息是否正確,減輕了司機勞動強度。新增的注冊列車數量、列車總重量等信息先由車載傳遞到TSRS,并由TSRS轉發至CTC,TSRS實時接收CTC運行計劃,并將站間線路數據傳遞至ATO車載設備。由列車超速防護系統生成移動授權,控制列車運行[9]。當運行計劃改變或者運行計劃失效時,RBC子系統及時通過MMI提醒司機,同時以北斗短報文的方式,將列車的實時運行狀態信息反饋至地面CTC中心,調度員隨時掌握車輛運行情況,正確下達相應調度命令。
3.4 遠動控制
鐵路信號遠動控制技術是遙控、遙信、遙測技術的總集。重載列車經常采用多機重聯模式運行,ATO子系統通過5G-R網絡,在控制本務列車的同時,也能實現遠程控制重聯機車[10],即調度員通過ATO子系統發出控制命令控制本務機車和重聯機車。
3.5 AI學習優化
ATO子系統具有一定的人工智能、學習優化功能。重載列車往往機車交路長度大,經常跨鐵路局集團公司跨線運行,且牽引重載列車的機車型號較多,牽引特性亦不完全一致。ATO子系統需要有良好的通用性和一定的人工智能,通過采用數字孿生技術收集并自主分析司機人工操縱時的習慣動作,尋找出司機的關鍵操作點、關鍵操作時刻,ATO子系統從而吸收司機人工操縱的優點,并不斷自我訓練,持續優化輔助控車水平,從而提高運輸效率,降低司機勞動強度,間接起到保障運輸安全的功能。
4 結束語
通過研究和分析,提出新型重載列車移動閉塞系統,新增部分ATO特性,在保證行車安全的前提下,在九礦—苗圃—寶豐3站2區間測試了發車間隔時間,并進行單相追蹤運輸試驗和上、下行追蹤運行試驗,在上、下行追蹤運行測試中,42 min內上、下行共計可通過4列車,大幅提升區間交會能力,系統順利通過測試,為展開進一步的工程化實驗研究提供了理論支撐,也為開展進一步的工程化實施創造了條件。系統的應用可推動設計、產品研發單位提高貨運專線鐵路的技術水平,也有助于重載鐵路進一步增運上量,同時達到降本、增效的作用。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
工業設計(2016年12期)2016-04-16 02:52:00