基于方位導(dǎo)引的無人僚機(jī)著艦進(jìn)近引導(dǎo)技術(shù)研究
2023-12-22 01:54:44張潤(rùn)哲劉雪嬌王全喜
現(xiàn)代導(dǎo)航 2023年6期
張潤(rùn)哲,劉雪嬌,王全喜
基于方位導(dǎo)引的無人僚機(jī)著艦進(jìn)近引導(dǎo)技術(shù)研究
張潤(rùn)哲,劉雪嬌,王全喜
(海軍研究院,北京 100036)
提出了一種由光電載荷、信息發(fā)送設(shè)備、信息接收設(shè)備和信息處理設(shè)備等組成的無人僚機(jī)著艦進(jìn)近引導(dǎo)系統(tǒng)(CAGS),利用方位導(dǎo)引方法實(shí)現(xiàn)長(zhǎng)機(jī)對(duì)無人僚機(jī)的著艦進(jìn)近引導(dǎo)。該系統(tǒng)擺脫了對(duì)衛(wèi)星導(dǎo)航技術(shù)的依賴,且無人僚機(jī)無需額外搭載用于進(jìn)近引導(dǎo)的雷達(dá)或光電設(shè)備。
著艦引導(dǎo);方位導(dǎo)引;無人僚機(jī)
0 引言
早在2015年,美軍便提出“忠誠(chéng)僚機(jī)”概念并不斷完善,此后包括我國(guó)在內(nèi)的多個(gè)國(guó)家持續(xù)對(duì)此開展作戰(zhàn)概念研究。“忠誠(chéng)僚機(jī)”旨在打造一系列與有人駕駛飛機(jī)相比性價(jià)比更高,與現(xiàn)有無人機(jī)相比功能性能更加出色的無人僚機(jī)系統(tǒng),目前“忠誠(chéng)僚機(jī)”尚停留在作戰(zhàn)概念或初步試驗(yàn)階段,暫未有成熟裝備誕生[1]。無人僚機(jī)具有一定的人工智能水平,參考美國(guó)的“小精靈”無人機(jī)(Unmanned Aerial Vehicle,UAV),其巡航速度為0.9 Mh,可以無人機(jī)集群方式組網(wǎng)作戰(zhàn),也可與有人駕駛飛機(jī)密集編隊(duì)、高效協(xié)同,執(zhí)行協(xié)同偵察、制空作戰(zhàn)和對(duì)陸攻擊等任務(wù),可使用多種平臺(tái)發(fā)射和回收[2]。無人僚機(jī)可采用通用平臺(tái),根據(jù)任務(wù)需要靈活配置載荷,多架無人僚機(jī)可與一架或多架有人駕駛飛機(jī)組網(wǎng)協(xié)同作戰(zhàn)。在可預(yù)見的未來,無人僚機(jī)可部署在航空母艦或兩棲攻擊艦等艦艇,可與陸基或艦載作戰(zhàn)飛機(jī)進(jìn)行編隊(duì)作戰(zhàn),作戰(zhàn)任務(wù)開始前,引導(dǎo)無人僚機(jī)起飛,抵近有人駕駛飛機(jī)并組網(wǎng)編隊(duì);任務(wù)結(jié)束后,引導(dǎo)無人僚機(jī)返回母艦[3]。
現(xiàn)有無人機(jī)著艦引導(dǎo)的一般流程為:
1)通過衛(wèi)通數(shù)據(jù)鏈向無人機(jī)發(fā)送返回指令,使其保持一定飛行高度并飛行至母艦視距范圍內(nèi);
2)母艦通過無人機(jī)起降引導(dǎo)數(shù)據(jù)鏈與無人機(jī)建立聯(lián)系,獲取無人機(jī)位置、航向、航速和高度等狀態(tài)信息;
3)編隊(duì)批準(zhǔn)無人機(jī)著艦進(jìn)近后,通過無人機(jī)起降引導(dǎo)數(shù)據(jù)鏈以較低數(shù)據(jù)率引導(dǎo)無人機(jī)飛向母艦進(jìn)行著艦進(jìn)近;
4)無人機(jī)距母艦距離、高度和速度等滿足著艦最終階段要求時(shí),通過無人機(jī)起降引導(dǎo)數(shù)據(jù)鏈以較高數(shù)據(jù)率引導(dǎo)無人機(jī)最終著艦[4]。現(xiàn)有無人機(jī)著艦引導(dǎo)全程需要通過衛(wèi)星導(dǎo)航獲取母艦和無人機(jī)平臺(tái)位置信息,尤其是最終著艦階段[5],更是需要通過實(shí)時(shí)差分定位(Real-Time Kinematic,RTK)衛(wèi)導(dǎo)技術(shù)獲取母艦和無人機(jī)平臺(tái)極高的定位精度(≤1 m)。
現(xiàn)有無人機(jī)著艦對(duì)衛(wèi)星導(dǎo)航技術(shù)的依賴,決定了在戰(zhàn)時(shí)一旦遭遇衛(wèi)導(dǎo)拒止,無人機(jī)將無法完成著艦,因此亟需發(fā)展衛(wèi)導(dǎo)拒止條件下的無人機(jī)高精度著艦引導(dǎo)技術(shù)。
1 無人僚機(jī)著艦進(jìn)近引導(dǎo)系統(tǒng)組成
基于方位導(dǎo)引的無人僚機(jī)著艦進(jìn)近引導(dǎo)系統(tǒng)如圖1所示,包括長(zhǎng)機(jī)和無人僚機(jī)。


2 無人僚機(jī)著艦進(jìn)近引導(dǎo)系統(tǒng)工作原理
系統(tǒng)準(zhǔn)備時(shí)需將光電載荷中的光電探測(cè)設(shè)備和測(cè)距設(shè)備一并安裝于同一伺服機(jī)構(gòu),將以上設(shè)備基準(zhǔn)線標(biāo)校一致并與伺服機(jī)構(gòu)的方位零位與俯仰零位保持一致,將光電載荷安裝于長(zhǎng)機(jī)平臺(tái),確保伺服機(jī)構(gòu)的零位線方向與長(zhǎng)機(jī)平臺(tái)基準(zhǔn)線方向一致。如圖2所示。

圖2 無人僚機(jī)著艦進(jìn)近引導(dǎo)系統(tǒng)示意圖
1)長(zhǎng)機(jī)與伴飛僚機(jī)前往母艦附近區(qū)域
2)長(zhǎng)機(jī)引導(dǎo)僚機(jī)飛向母艦,準(zhǔn)備著艦進(jìn)近


式中,為的輻角。
長(zhǎng)機(jī)載機(jī)坐標(biāo)系復(fù)平面中位置量的定義如圖4所示,在長(zhǎng)機(jī)載機(jī)坐標(biāo)系的復(fù)平面中,母艦的位置矢量,如式(2)所示

式中,為的輻角。
光電載荷將以上信息輸出至信息發(fā)送設(shè)備,信息發(fā)送設(shè)備將以上信息作為著艦進(jìn)近引導(dǎo)指令信息發(fā)送至無人僚機(jī)的信息接收設(shè)備,引導(dǎo)無人僚機(jī)飛向母艦。信息發(fā)送設(shè)備在每個(gè)著艦進(jìn)近引導(dǎo)指令周期末將著艦進(jìn)近引導(dǎo)指令發(fā)送至信息接收設(shè)備。

由式(1)和式(3),可獲取無人僚機(jī)在長(zhǎng)機(jī)載機(jī)坐標(biāo)系中的速度矢量如式(4)所示

幅角

3)長(zhǎng)機(jī)對(duì)無人僚機(jī)進(jìn)行著艦進(jìn)近引導(dǎo)直至無人僚機(jī)由母艦接管





由式(1)和式(9),有

此時(shí)長(zhǎng)機(jī)載機(jī)坐標(biāo)系復(fù)平面中母艦位置矢量和母艦相對(duì)無人僚機(jī)位置矢量如式(12)和式(13)所示。





此時(shí),

(3)將步驟(2)反復(fù)迭代,無人僚機(jī)接收若干批次著艦進(jìn)近引導(dǎo)指令,直至無人僚機(jī)飛抵母艦附近,無人僚機(jī)至母艦距離和高度滿足最終著艦階段要求,如圖5所示。
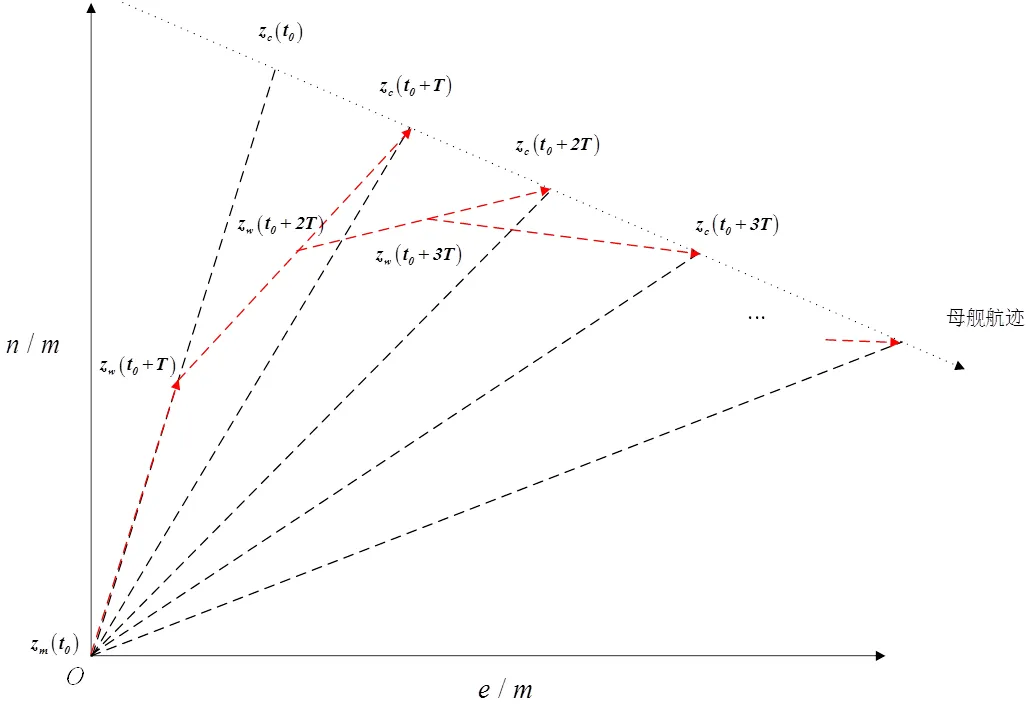
圖5 長(zhǎng)機(jī)載機(jī)坐標(biāo)系中著艦進(jìn)近引導(dǎo)工作流程示意圖
4)著艦進(jìn)近引導(dǎo)階段結(jié)束,無人僚機(jī)由母艦接管
3 無人僚機(jī)著艦進(jìn)近引導(dǎo)仿真分析
設(shè)定仿真的想定如下:首先在大地坐標(biāo)系中設(shè)定長(zhǎng)機(jī)平臺(tái)和母艦的初始位置和狀態(tài),如圖6所示。
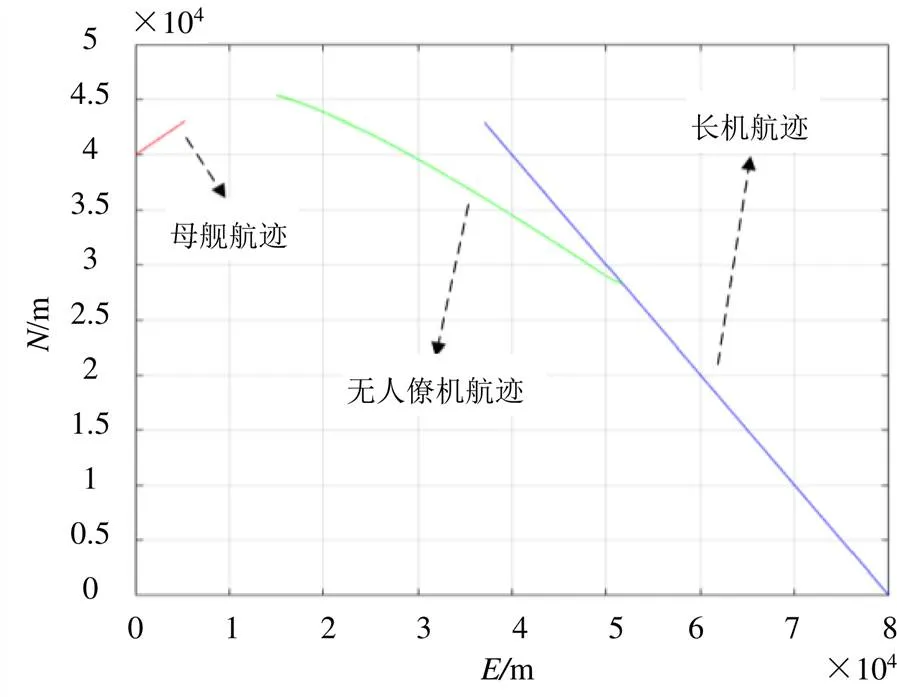
圖6 大地坐標(biāo)系中航跡示意圖
1)長(zhǎng)機(jī)

2)母艦
3)無人僚機(jī)

σ=602.77 s (RMS),1 000次獨(dú)立重復(fù)試驗(yàn)中σmax=620.24 s,σmin=589.33 s;
ΔR=246.71 m (RMS),1 000次獨(dú)立重復(fù)試驗(yàn)中ΔRmax=446.33 m,ΔRmin=3.87 m。

圖7 長(zhǎng)機(jī)載機(jī)坐標(biāo)系中航跡示意圖
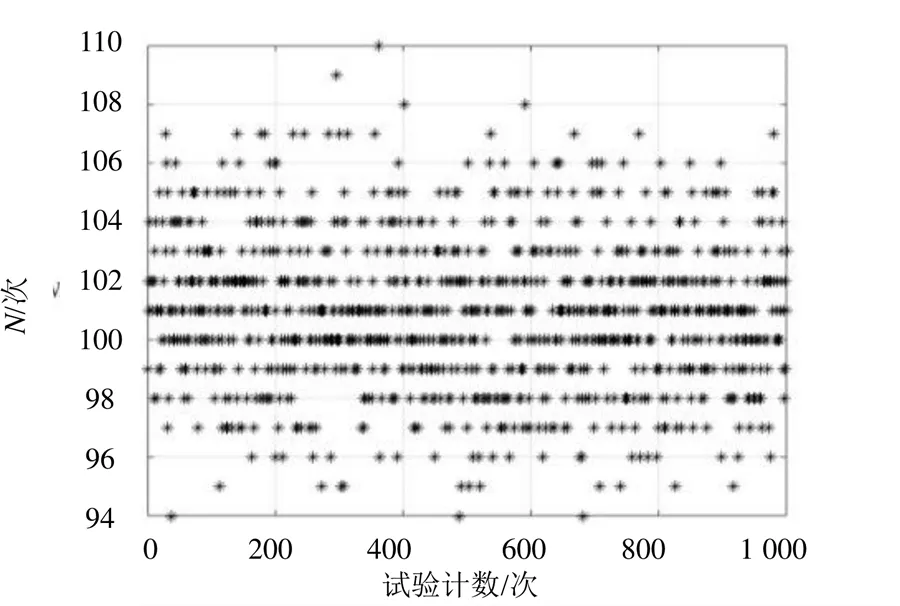
圖8 長(zhǎng)機(jī)向無人僚機(jī)發(fā)送著艦進(jìn)近引導(dǎo)指令周期總數(shù)統(tǒng)計(jì)示意圖
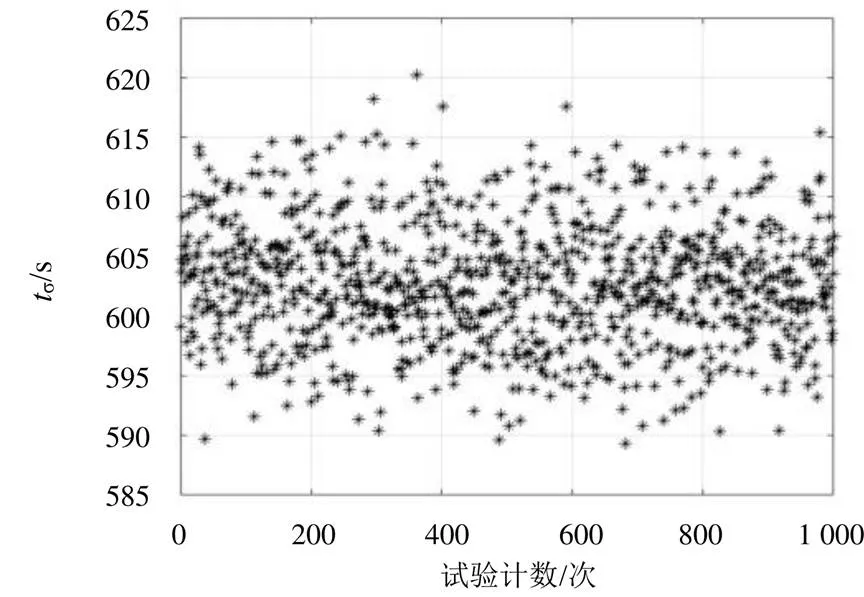
圖9 無人僚機(jī)由母艦接管時(shí)刻統(tǒng)計(jì)示意圖
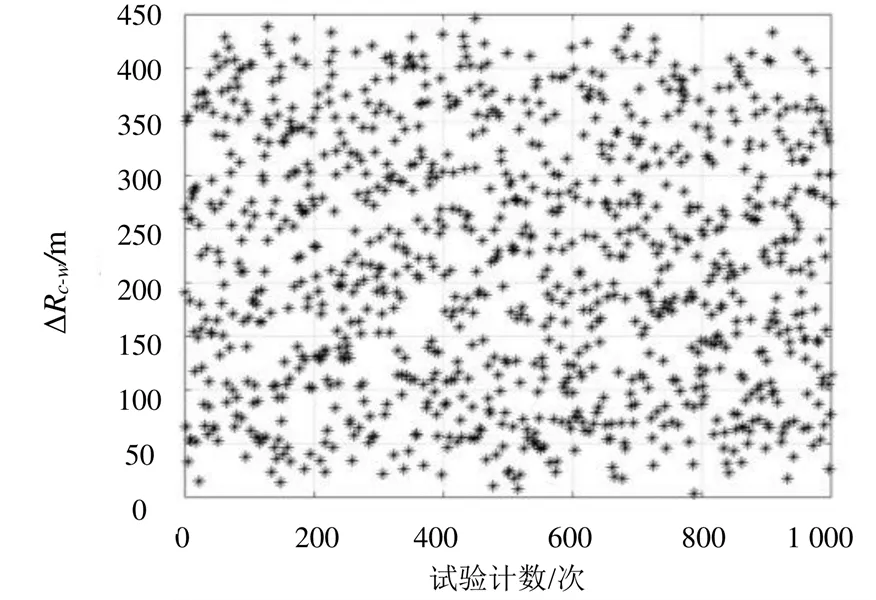
圖10 無人僚機(jī)由母艦接管時(shí)系統(tǒng)定位精度統(tǒng)計(jì)示意圖
4 結(jié)語(yǔ)
本文提出了一種基于方位導(dǎo)引的無人僚機(jī)著艦進(jìn)近引導(dǎo)系統(tǒng),該系統(tǒng)通過長(zhǎng)機(jī)搭載的光電載荷探測(cè)航行中的母艦,形成無人僚機(jī)的方位導(dǎo)引信息,引導(dǎo)無人僚機(jī)飛近母艦完成進(jìn)近。該系統(tǒng)擺脫了無人機(jī)著艦進(jìn)近引導(dǎo)對(duì)衛(wèi)星導(dǎo)航技術(shù)的依賴,全程無需獲取長(zhǎng)機(jī)平臺(tái)和無人僚機(jī)的精確地理坐標(biāo),在衛(wèi)導(dǎo)拒止條件下依然能夠抵近母艦;并且無人僚機(jī)進(jìn)近全程接收長(zhǎng)機(jī)發(fā)送的著艦進(jìn)近引導(dǎo)指令,無需自行對(duì)母艦方位、俯仰和距離等信息進(jìn)行探測(cè),可節(jié)約無人僚機(jī)有限的載重量,以便增加其它有效任務(wù)載荷。
[1] 羅伯特肖. 戰(zhàn)斗機(jī)空戰(zhàn):戰(zhàn)術(shù)與機(jī)動(dòng)(下)[M]. 北京:中國(guó)市場(chǎng)出版社,2018.
[2] Major Paul Calhoun. DARPA emerging technologies[J]. Air & Space Power Journal,2016(12).
[3] JOHN W.Configuration design development of the navy UCAS-D X47-B[J]. Bulletin of the World Health Organizatoin,2015,87(11):824-832.
[4] Ferrier,Bernard. Fire scout UAV launch and recovery system performance improvement[C]. AUVSI Unmanned Systems,2014,1106-1128.
[5] Wasson J P,Moresve J. Automatic decking of UAV helicopters on a ship [J]. Navigation,2009,57(228):19-44.
[6] Baeriswyl P, Schildknecht T,Springer T,et al.Time Transfer with Geodetic GPS Receivers Using Code and Phase Observations [C]// 10th International Conference on European Frequency and Time. Brighton: IET,1996:430-435.
[7] 毛虎,吳德偉,閆占杰. 針對(duì)GPS接收機(jī)性能的壓制干擾區(qū)域分析[J]. 宇航學(xué)報(bào),2014,35(9):1078-1086.
[8] René Jr Landry,Boutin P,Constantinescu A. New anti-jamming technique for GPS and GALILEO receivers using adaptive FADP filter [J]. Digital Signal Processing,2006,16(3):255-274.
[9] 趙丹寧,雷雨. GLONASS 星載原子鐘的長(zhǎng)期特性分析[J]. 武漢大學(xué)學(xué)報(bào)(信息科學(xué)版),2021,46(6): 895-904.
[10]Ai Q,Yuan Y,Xu T,et al. Time and frequency characterization of GLONASS and Galileo on-board clocks[J]. Measurement Science and Technology,2020,31(6):065003.
Carrier Approach Guidance Technology Based on Azimuthal Guiding Technique
ZHANG Runzhe, LIU Xuejiao, WANG Quanxi
An airborne Carrier Approach Guidance System (CAGS) is proposed which consists of photoelectric load, transmitting device, receiving device, data processing device, etc. CAGS implemented the leader-wingman azimuthal guiding technique for Unmanned Aerial Vehicle wingman carrier approach. CAGS is a satellite-free system that doesn’t rely on landing approach devices such as radar or photoelectric device carried by UAV.
Carrier Approach; Azimuthal Guiding; Unmanned Aerial Vehicle Wingman
V279
A
1674-7976-(2023)-06-416-06
2023-09-20。
張潤(rùn)哲(1990.02—),山東蓬萊人,碩士,主要研究方向?yàn)槔走_(dá)領(lǐng)域研究。
猜你喜歡
中國(guó)特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
數(shù)學(xué)小靈通(1-2年級(jí))(2020年9期)2020-10-27 03:24:18
當(dāng)代貴州(2019年41期)2019-12-13 09:28:56
電子制作(2018年11期)2018-08-04 03:26:08
中華手工(2017年2期)2017-06-06 23:00:31
工業(yè)設(shè)計(jì)(2016年12期)2016-04-16 02:52:00
中國(guó)共青團(tuán)(2015年7期)2015-12-17 01:24:38
中外會(huì)展(2014年4期)2014-11-27 07:46:46
消費(fèi)者報(bào)道(2014年7期)2014-07-31 11:23:57
環(huán)球時(shí)報(bào)(2009-09-09)2009-09-09 09:42:49