適應無人駕駛汽車的道路設施設計綜述
2023-12-21 09:43:46陳正委張高峰
西南交通大學學報 2023年6期
關鍵詞:汽車
徐 進 ,陳 欽 ,陳正委 ,張高峰 ,袁 泉 ,陳 堅
(1.重慶交通大學交通運輸學院,重慶 400074;2.重慶交通大學山區復雜道路環境人-車-路協同與安全重慶市重點實驗室,重慶 400074;3.重慶城市綜合交通樞紐(集團)有限公司,重慶 401121)
第46 屆世界經濟論壇會議確定了第四次工業革命的三大技術大趨勢,即連通性、人工智能和靈活自動化,全自動駕駛技術與這些趨勢相一致.從宏觀角度來講,自動駕駛是先進制造業的助推劑;從微觀角度來看,無人駕駛汽車的發展和應用能更好地緩解交通擁堵,也能降低交通事故率.目前,我國發展無人駕駛技術已經上升至國家戰略層面,交通運輸部等多個部門出臺了關于無人駕駛技術的政策法規和標準,智能網聯汽車產業發展取得積極效果.“交通強國建設綱要”明確提出大力發展智慧交通和智能網聯汽車.
無人駕駛汽車是道路運載工具在未來時期的主要形式,在5G 通信技術、人工智能和車路協同等前沿技術的推進下,無人駕駛汽車發展已經進入新階段.無人駕駛汽車有2 條發展路徑:一是單車智能,通過高級自動駕駛輔助系統(ADAS)中的各種傳感器感應周圍的環境,結合高清攝像機、雷達和高精度地圖,循序漸進地完善輔助駕駛系統,進而實現無人駕駛;二是車路協同,在道路路側安裝智慧感知設施,基于5G 技術、物聯網技術、無線通信等先進技術完成車-車、車-路動態信息實時交互,將“人-車-路-云”中各交通參與要素有機結合在一起,提高自動駕駛感知和決策能力,降低車輛自動感知道路、車輛信息的復雜度,實現人、車、路之間的有效協同,進而實現無人駕駛.
當無人駕駛汽車行駛在路上時,車載集成系統實時感知或者通過路側設施和云平臺接收道路環境信息,同時需要更可讀的標志標線和交通信號,通過智能決策和控制取代人類駕駛員完成各種駕駛任務.因此,無人駕駛汽車對道路設施和交通管理提出了新要求.現行道路設施設計是面向傳統人工駕駛汽車,在本質上,道路幾何線形、交通標志、標線及交通信號等基礎設施考慮的是車輛運行特性和駕駛人行為特性(包括心理、生理特性).而無人駕駛汽車需要一種多功能集成的道路基礎設施系統來輔助進行環境感知和實時通信.除了特斯拉是以攝像頭為主傳感器外,不同自動駕駛廠商的傳感器配置基本相同,都是采用攝像頭+激光雷達+毫米波雷達/超聲波雷達+“衛星定位-慣性導航”系統組合傳感器方案,以及感知層、決策層、執行層的技術架構.不同自動駕駛等級的區別在于:除了本地傳感器外,L4 及以上等級的自動駕駛系統還與其他車輛和路側設施進行信息交互,并在高精度地圖的輔助下獲得更好的環境感知能力.此外,實現自主駕駛的關鍵還在于系統的處理和決策能力,包括算法、計算平臺和通信時延,復雜行駛環境下傳感器會產生大量實時數據,計算平臺需在極短時間內對海量數據進行處理、分析,并給車輛執行層下達操作指令,以保證自動駕駛車輛的安全行駛.目前,低速環境的自動駕駛技術已經基本成熟,并且在物流配送、自動巡檢、低速公交等場景已經取得商用.但高速行駛環境(高于80 km/h)自動駕駛技術還不成熟,系統的可靠性還不足以保證行駛安全,尤其是在復雜道路環境(如施工區、復雜線形、畸形交叉口、雨霧、冰雪道路等)中還存在目標識別緩慢、準確率低、數據傳輸延誤等基本問題.
在無人駕駛發展演進過程中,必定會經歷無人駕駛車輛和人工駕駛車輛混行的階段.對于大多數的車輛而言,斷崖式地去除人工駕駛會浪費現有25 億駕駛員的駕駛技能,不會被社會認可.在人工智能成熟度有待發展、配套的道路基礎設施沒有達到理想狀態以及無人駕駛汽車的道德倫理和法律法規沒有完善的情況下,傳統人工駕駛汽車在未來相當長時期內仍然是主流.無人駕駛專用車道是無人駕駛發展過程中的一個過渡階段,配備專用的標志標線、信號控制以及低延遲的5G 通信來完成環境監測和車輛運行控制,進而實現不需要駕駛人介入的無人駕駛.
本文從無人駕駛汽車的技術特點和發展戰略入手,分析目前國內外適應無人駕駛汽車運行特性的道路基礎設施設計的研究現狀,明確無人駕駛汽車對道路設施設計的需求和影響,為無人駕駛道路的幾何設計、標志標線設計等提供理論支撐.對面向未來的交通基礎設施開展研究,有助于提前謀劃相關道路基礎設施的未來發展方向,提高基礎設施適應性、兼容性,提升資源利用效率和社會經濟效益.
1 適應無人駕駛汽車的道路基礎設施
適應無人駕駛汽車的基礎設施研究仍處于起步階段.目前,國內外出臺的相關標準與規范還較少,大多數研究學者都建議對現有的技術標準(比如美國公路及運輸協會(AASHTO)頒布的綠皮書)進行修改和調整,以適應無人駕駛車輛的行駛特性.對于道路的基礎設施建設,大家討論的焦點主要集中于幾何線形、路面結構、標志標線、停車設施、車路協同設施、交通設施數字化等方面.
1.1 道路幾何線形
對于道路縱斷面設計,Khoury 等[1-2]認為凸形和凹形豎曲線半徑可以適當減小,相比于傳統人工駕駛模式,無人駕駛汽車收集環境信息的雷達裝置要高于駕駛人眼睛的高度,可以保證車輛在豎曲線半徑較小的路段安全通過,如圖1 所示.豎曲線半徑和長度的減小可以減少道路建造時的填、挖方量,節約建筑成本的同時也能最大程度保護自然環境;考慮到無人駕駛減少了人為因素影響,停車視距、感知反應時間、決策視距會減小,因此,感知反應時間將會由AASHTO 推薦的2.5 s 降低到0.5 s.對于上述變化,Sen 等[3]組織學生進行了實踐驗證,得出的結論與上述情況基本吻合.

圖1 無人駕駛與人工駕駛車輛對豎曲線半徑的行駛需求差異Fig.1 Driving demand difference in vertical curve radius between self-driving car and manual driving car
關于道路平曲線設計,不管是人工駕駛還是無人駕駛,平曲線參數都是受車輛橫向力系數和行駛穩定性控制,與是否由人來駕駛無關,因此,Othman[2]認為:平曲線半徑、緩和曲線的設計不會發生改變.
出于駕駛人視覺特性的考慮,不管是國內還是國外,現行的道路設計規范大都對平曲線最小長度和平曲線最小轉角做出了限制,即規定了平曲線路段的最小允許偏角值,這是由于過小的偏角會使得曲線路段呈現出明顯的“折彎”錯覺,可能誘發駕駛人的錯誤操作行為,導致車輛失控進而駛離路面或是與路側設施相撞,如圖2(a)、(b)所示.但對于無人駕駛車輛,道路幾何線形信息是由車載傳感器感知或者由路側設備提供,小偏角曲線不存在視錯覺的問題,因此,可以放寬對最小偏角的限制.取消小偏角的限制之后,沿江的山區道路更容易進行路線布設(見圖2(c),沿江道路由于地形特點,主要由小偏角曲線構成),可以顯著降低道路修建導致的土建費用和由此帶來的環境擾動.
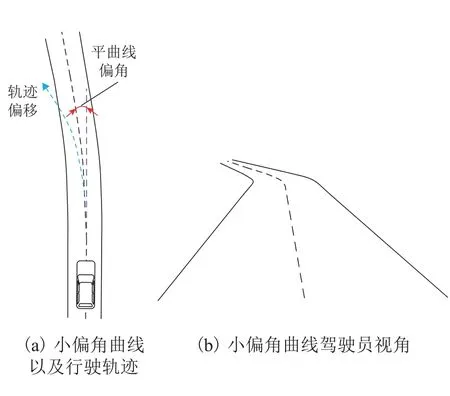
圖2 小偏角曲線示意Fig.2 Curves with small declination angle
對于直線路段,現行的設計規范對直線最大長度做出了規定,因為直線過長會導致駕駛人員犯困.與此同時,出于對駕駛人員視覺特性的考慮,現行規范對相鄰曲線之間的直線最短長度也進行了限定.對于無人駕駛車輛而言,對直線長度的限制將失去意義,因此,可不再考慮最短長度和最大長度的限制.
1.2 車道以及路面寬度
關于道路橫斷面以及路面結構設計,Machiani等[4]認為無人駕駛車輛可以在9 英尺(約2.75 m)寬的路面上安全行駛,車輛在無人駕駛時更有可能在車道中間以高精度運行[5],即車輛的橫向擺動會減小,如圖3(a)所示.而人類駕駛員操縱車輛時,車輛行駛軌跡會發生橫向擺動,尤其是彎坡路段,如圖3(b)所示.Chen 等[6]運用有限元建模分析得出,車輛橫向擺動的減小會使路面經受更多的集中荷載,柔性路面在車輪反復碾壓下將加速車轍、裂縫和其他損壞的出現,尤其是供貨車自動駕駛編隊行駛的車道.這一問題的解決方法有2 種:一種是加強柔性路面的抗車轍設計,但這樣勢必會增加路面的建造和維護成本;另一種是對車輛路徑進行編程,使其在整個路面上均勻的分布.

圖3 傳統人工駕駛車輛和無人駕駛車輛的行駛軌跡Fig.3 Trajectories of traditional manual driving car and self-driving car
1.3 交通標志標線
面向無人駕駛車輛,標志、標線有2 種主流設計方案.1)一種是對現有的標志和標線作較小的改動,并對圖像檢測識別算法進行優化升級,以便無人駕駛車輛更精準地識別出交通標志標線,但需要保證交通標線的連續性,不能出現較長范圍內標線缺失的情況,以避免可行駛路面空間規劃中斷導致的安全隱患.對此,Li 等[7]提出了車道標志、標線的3 個質量指標(正確性、形狀和可見性)要求,以及計算3 個指標的雙模算法,該方法能夠識別車道標志、標線的異常,以便于道路管理部門的維修與整改.2)另一種方案是建設數字基礎設施,在車道兩旁和車道內預埋傳感器,當無人駕駛車輛駛過路段時就可以接收到傳感器發出的信息,從而作出規劃和決策.此種方案可以隱藏標志、標線,避免了標志、標線由于被遮擋帶來的安全隱患,同時乘客會有更廣闊的視野,提高了駕乘的舒適感,而這一方案的關鍵在于V2I(vehicle to infrastructure)技術的發展.
1.4 適應高速無人駕駛的道路設施設計
根據自動駕駛技術的發展趨勢可以預見,我國高速公路設計速度將突破現有的120 km/h 最高限速[8].何永明[9]將自動駕駛背景下的超高速公路設計速度分為3 個等級,如表1 所示.印順超[10]針對最大設計速度180 km/h 的超三級高速公路進行了幾何設計標準研究,提出無人駕駛高速公路幾何設計包括平面線形、縱斷面和橫斷面要素的指標推薦值.但目前這些推薦值僅是由理論分析得出,并沒有構建嚴謹的計算模型,同時,也沒有進行實驗來驗證這些推薦值的可行性.

表1 無人駕駛超高速公路等級劃分Tab.1 Classification of self-driving superhighways
李智等[11]應用壓力膠片技術采集高速公路路面的輪胎接觸應力分布數據,分析發現,高速公路路面抗滑性能隨通車時間的延長而逐漸衰減.與傳統高速公路相比,超高速公路能為無人駕駛車輛提供更高車速的運行條件,但存在因為路面抗滑性不夠導致車輛運行不穩定的風險[12].基于高速公路瀝青路面的附著特性,黃曉明等[13]運用CarSim/Simulink仿真軟件分析了無人駕駛車輛在瀝青路面上的制動特性,結果表明:隨著車速的不斷增加,輪胎與路面之間的接觸面逐漸減小,導致摩擦系數不斷降低,進而影響高速行駛狀態下的行車安全.因此,在高速行駛環境下需要著重考慮路面摩擦系數變化對無人駕駛車輛運行安全的影響,在公路建設、運營和維護階段須對公路路面進行檢測分析,保障路面的各項性能指標滿足通車要求.
1.5 停車設施
與傳統停車方式不同,無人駕駛車輛可以在駕駛員和乘客下車后自動前往最近的停車場停車,這將為停車位的組織和管理帶來變革.Ferreira 等[14]提出機動性停車概念,駕駛人無需進入停車場,無人駕駛車輛能夠全自動自主停車,保證了人員安全并節約了開關車門的空間,實現停車場空間的充分利用,能夠將停車場空間利用率提高約20%.Nourinejad等[15]指出,當無人駕駛車輛需要停車時,乘客在指定區域下車后,車輛會自動駕駛到停車位停車,這樣每個停車位能夠平均減少2 m2的空間,并提出了一個混合整數非線性規劃,將停車場中的每個停車區視為一個排隊系統,優化了車輛停車次序,如圖4 所示.因此,自動駕駛停車場可以將停車位需求平均減少62%,最大減少87%.2021 年,小鵬汽車推出了記憶泊車功能(VPA),VPA 系統通過路線學習記憶路口、車道線、墻面等基本信息,并繪制高精度地圖,通過該系統可自動駕駛車輛停在空余車位,該功能支持記憶100 個停車位,2022 年3 月上線的VPA-L 實現了跨樓層記憶泊車.
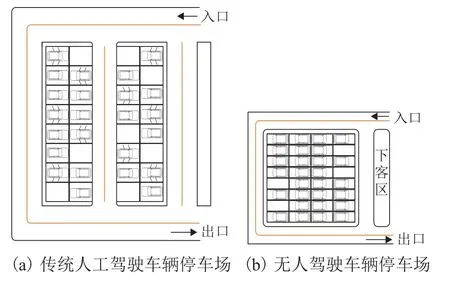
圖4 傳統人工駕駛與無人駕駛停車場占地對比Fig.4 Comparison between parking lots for traditional manual driving car and self-driving car
在共享無人駕駛車輛的背景下,停車位的需求將會大大減少.Zhang 等[16]模擬了佐治亞州亞特蘭大市的共享無人汽車運行,結果表明,共享無人駕駛在5%的市場滲透率水平下可以將亞特蘭大的停車場面積減少4.5%.因此,無人駕駛汽車的停車場占地面積會更小,同時,城市中停車場的總數也將減少.
1.6 道路設施數字化
在數字基礎設施方面,Grigorescu 等[17]介紹了基于AI 的自動駕駛架構、卷積/循環神經網絡以及深度強化學習規范,構成了調查駕駛場景感知、路徑規劃、行為判斷和運動控制算法的基礎.在運營實踐中,更新道路基礎設施數據非常繁瑣、耗時,Yang等[18]提出語義標記框架,識別道路基礎設施相關信息,為公路基礎設施信息存儲提供理論支撐.
AI 在過去的幾年得到了快速發展,傳感技術得到巨大提升,在一定程度上促進了數字基礎設施的發展,但與此同時,不得不注意網絡攻擊給數字基礎設施帶來的威脅.與所有網絡計算設備一樣,連接性的增強通常會導致網絡攻擊風險的增加,進而威脅到無人駕駛的行車安全.對于網絡攻擊帶來的威脅應該持有這樣的態度,即不能因為存在這樣的安全隱患放棄數字基礎設施的建設,也不能在建設數字基礎設施時忽視這一因素,在數字基礎設施應用以前應做好足夠的實驗以檢查和修復漏洞.
2 服務于無人駕駛的智慧路側設施
車路協同技術是智慧交通系統的重要組成部分,現有的一些研究將車路協同路側設施稱為智慧路側系統,該系統集成了V2X(vehicle to everything)通信、高精定位、高精地圖、融合感知、邊緣計算等技術,能夠實現數據感知、交通效率、交通安全、數據服務等功能.智慧路側系統通常包括路側單元(RSU)、路側智能設施(包括攝像頭、雷達、環境感知設備、智能紅綠燈、智能化標志標識等)、移動邊緣計算(MEC,包括路側MEC 和運營商MEC)等設備[19].在智慧路側設施部署方面,江蘇科創車聯網產業研究院牽頭編寫了《車聯網路側設施設置指南》[20],為車路協同和智慧路側設施建設提供指導.
RSU 是車路協同路側設備的核心設備,由高增益定向束控讀寫天線和射頻控制器組成,其中,天線是一個微波收發模塊,主要負責信號和數據的接發、調制編碼、加密等工作;射頻控制器是控制接發、處理數據以及向上位機收發信息的模塊.RSU 采用DSRC(dedicated short-range communication)技術與車載單元(OBU)和各系統組件進行實時通信,實現車、路、云平臺之間的通信,同時還具備邊緣計算功能.在高速公路和停車場中安裝RSU,能夠建立無人值守的快速專用車道.
路側設施提供了車輛與路之間的通信服務,目前,國際主流的車路通信技術包括DSRC 和LTEV2X(基于Long Term Evolution 系統的V2X)技術路線,在DSRC 技術下,V2V(vehicle to vehicle)的信息傳遞必須通過RSU 才能完成[21].RSU 的部署是一個熱點問題,國內外學者做了詳細的研究:朱涵[22]構建了RSU 的部署模型,運用遺傳算法和粒子群算法對高速公路以及城市道路的路側RSU 部署問題優化求解,應用MATLAB 軟件進行模擬,驗證RSU部署的最優性;吳湧[23]提出有用貢獻量的概念,設計了基于有用貢獻量的RSU 部署算法,在相同服務質量要求下,減少RSU 的數量;李志龍[24]將最小化RSU及線纜部署成本作為優化目標,提出一種基于平面加權無向圖的雙層嵌套遺傳算法和實時部署策略,能夠有效解決RSU 的部署問題;王健[25]提出一種基于優先級的交叉路口節點部署方法,并比較在不同區域使用迭代法、動態優化法以及混合法所需要的節點數量以及重疊度;Fogue 等[26]提出了一種能夠自動提供適用于任何給定路線圖布局的RSU 部署遺傳算法,能夠縮短警告通知時間,提高車輛通信能力;Massobrio 等[27]提出了2 種最先進的貪婪算法,一個專注于優化成本,另一個專注于QoS(服務質量),模仿人類決策者的規劃策略,以構建路側單元部署問題的解決方案;Guerna 等[28]提出了一種新的基于優先級概念的遺傳交叉覆蓋算法,與傳統貪婪方法進行比較,該算法能夠確保最大的網絡連通性,同時,對RSU 的數量需求最少,重疊率降低.
總的來說,關于RSU 的部署方法的研究大多數都是通過計算機仿真來驗證方案的可行性,缺少對部署方案的實踐驗證.大多數方案均為靜態部署的,靜態部署方案針對的交通狀況比較簡單,在真實城市環境下,城市熱點區域和交通稀疏區域可能會隨著時間的推移發生遷移,此時靜態部署方案的優點不再顯現.相比于靜態部署,動態部署方案是RSU部署方案的新趨勢,可在不同密度場景和復雜布局下提高車輛通信能力.王健[25]研究表明,動態與靜態部署方案相互配合形成的混合方案也能體現出不俗的優點.
3 無人駕駛專用車道
3.1 無人駕駛車道的必要性
網聯自動駕駛汽車(CAV)通過安裝在車輛上的交互系統和其他車輛以及道路環境進行信息實時交互,自主完成車輛駕駛任務.但是,目前CAV 車輛尚未普及,實際應用較少,一方面是因為相關核心技術還沒能取得突破性進展,另一方面是現有的道路基礎設施不能較快地為無人駕駛汽車提供專項服務.相關研究表明,為防止未來無人駕駛汽車在混合交通演變過程中頻繁出現事故,需要在政策、法律以及道路設施設計方面提出更高要求[29].綜合考慮道路設施設計因素、交通安全和效率因素,Rad 等[30-31]提出劃分路網中的部分車道供自動駕駛車輛使用,為自動駕駛道路的演進提供了一種過渡方案.
專用車道能夠減少無人駕駛汽車和人工駕駛車輛之間的干涉,避免混行帶來的各種問題,在本質上減少了無人駕駛車輛和其他傳統車輛的沖突,有利于提升道路使用效率和行駛安全,也有利于無人駕駛汽車的發展和普及[32-33].由于明確了車輛的專用路權,解決了無人駕駛系統出現故障或者在混合交通中不兼容導致的交通事故或者侵權行為,為后續責任判定和相關立法掃清了障礙[34].
3.2 專用車道設施和隔離方式
無人駕駛專用車道總體構架是由物理基礎設施和數字基礎設施組成,物理基礎設施主要包含行車道、標志標線、車道隔離設施等;數字基礎設施主要包含高精度雷達、攝像設備、通信設備、高精度定位系統等,結合5G 技術的云計算平臺共同輔助無人駕駛汽車行駛[35].
在無人駕駛物理基礎設施規劃設計中,Liu 等[36]模擬了一段帶有一條無人駕駛專用車道的高速公路,研究了新的變道規則和速度控制算法,為無人駕駛專用車道的設置提供理論依據.在規劃無人駕駛專用車道數量時,隨著無人駕駛汽車的不斷滲透,無人駕駛車輛需要更多的路權來保證運行暢通,Saeed[29]認為L3 級自動駕駛階段完成后,會限制傳統人工駕駛車輛行駛在人工車道上面,而其余車道完全為所有無人駕駛車輛服務,例如無人駕駛公交車道、無人駕駛網約車道、無人駕駛貨車車道.自動駕駛專用車道通常設置在同向至少3 條行車道的道路上,即扣除掉自動駕駛車道外還需保留至少2 條常規車道,以方便人工駕駛車輛進行換道超車.
由于與常規車道共用一幅路面,需要進行專用道隔離以實現無人駕駛車輛的專用路權.美國國家自動高速公路系統聯盟在1997 年自動高速公路系統的報告[37]中引入3 種自動駕駛專用道隔離方式,分別為普通標線分隔、緩沖帶分隔和物理設施硬性分隔.傳統的硬質隔離設施包含波形梁護欄、矩形護欄、組合式護欄以及綠化帶分隔設施,除了這4 種隔離設施之外,考慮到中國駕駛人的行為習慣和車輛運行特點,城市道路工況也可以采用橡膠棒、橡膠桿等軟質隔離設施;還可以使用在無人駕駛車道上鋪設特殊顏色的隔離方式,并配合交通標志標線明確自動駕駛車道的專用路權,如表2 所示.

表2 專用車道的隔離方式Tab.2 Isolation methods of exclusive lane
3.3 無人駕駛車道的發展演進
當前形勢下,為應對無人駕駛汽車的推廣普及需要更高水平的道路基礎設施的支持,但是,目前無人駕駛專用車道的規劃使用還僅僅局限在工業園區、港口等封閉區域,這些場景主要面向速度較低的商用無人駕駛車輛.因為乘用車無人駕駛技術還未取得突破性進展,開放道路的無人駕駛汽車專用車道還需要更加全面地評估才能推廣到實際應用中.在無人駕駛乘用車技術完全成熟之后,無人駕駛專用車道數會隨著無人駕駛車輛滲透率的增加而增加,由階段Ⅰ逐漸演進到階段Ⅳ,最終實現完全化的無人駕駛道路,如圖5 所示.
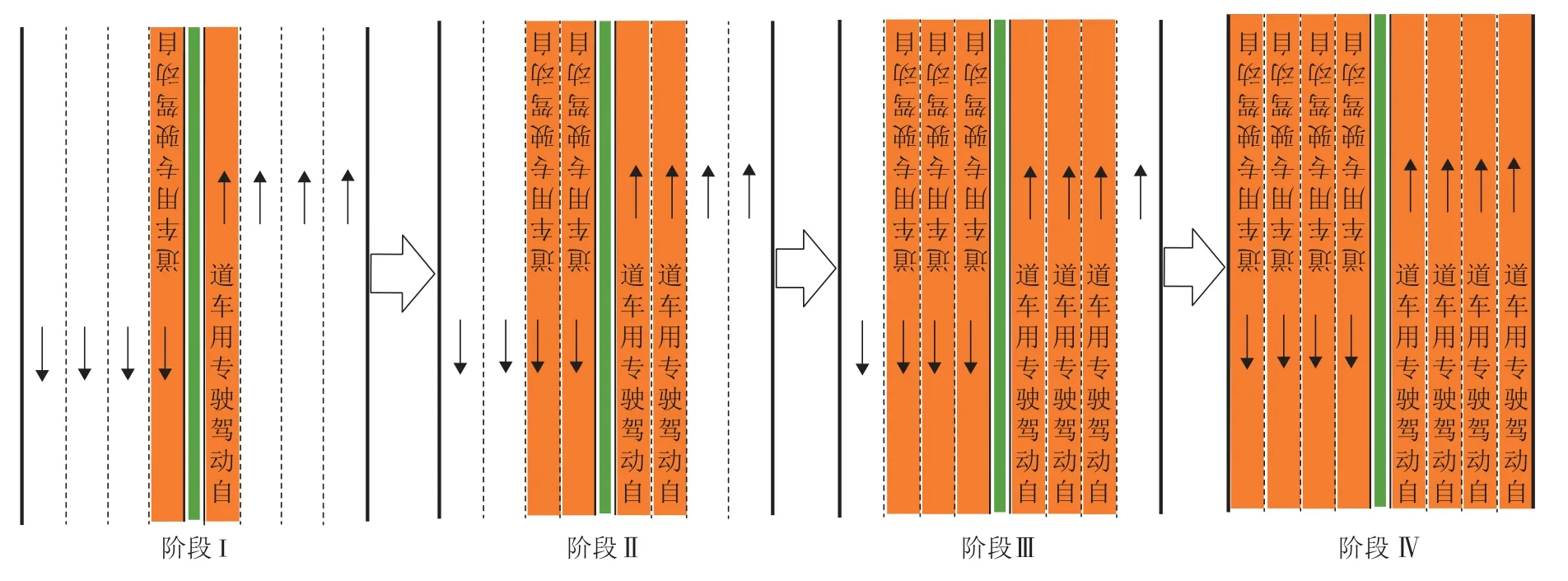
圖5 由自動駕駛專用車道過渡到自動駕駛道路(以雙向八車道為例)Fig.5 Transition from self-driving exclusive lane to self-driving roadway(taking two-way roadway with eight lanes as an example)
根據行業當下的發展趨勢,貨車自動駕駛編隊可能比無人駕駛乘用車更先落地商用,所以自動駕駛專用車道大概率會先應用于支持貨車自動駕駛編隊.目前面臨的問題是:如果是為自動駕駛貨車服務,高速公路和快速路的專用車道該如何設置,是參考乘用車將其設置在內側車道,還是根據管理慣例將專用車道設置在外側 ?需要綜合駕駛習慣、交通沖突、事故后果、通行效率等因素進行平衡和折中考慮.
4 面向無人駕駛道路設施的研究方法
自動駕駛系統的研究和測試是一個耗費精力、投入巨大的技術開發過程,而無人駕駛車輛需要何種道路基礎設施環境?面對不同行駛工況,無人駕駛車輛如何做出回應?這一直都是備受關注的問題.先通過計算機進行仿真分析,再進行實車試驗,是研究無人駕駛車輛的常用思路,能夠大幅節約研發成本.目前,國內外有多種能夠模擬理想環境或現實環境,并定量分析研究智能交通系統中各個分支的軟件系統和仿真模型,常用的軟件有:LG 電子美國研發中心基于Unity3D 軟件開發的適用于無人駕駛開發者的多機器人模擬器LGSVL Simulator,Autodesk 公司推出的Infraworks 軟件,Mentor 公司的Modelsim 軟件,德國PTV 公司開發的VISSIM 軟件,西門子公司旗下汽車駕駛仿真軟件產品Prescan.通過不同軟件平臺的相互調用,可以實現自動駕駛聯合仿真,如Simulink-CarSim 軟件聯合仿真測試.
4.1 無人駕駛虛擬仿真測試方法
道路標志標線是正確引導車輛在道路上安全行駛的重要基礎設施,車輛通過道路交叉口時主要受交通信號燈的引導,目前,關于無人駕駛車輛與道路基礎設施之間信息交互的仿真模擬主要體現在車輛與交通信號燈之間的信息互通方面.王賀鵬等[38]通過Infraworks 軟件繪制模擬環境下的道路交叉口基本場景,使用三維建模軟件3Ds Max 構建交通燈的三維模型,再基于虛幻引擎軟件Unreal Engine 4 編程實現無人駕駛汽車行駛條件下的信號燈變化,以達到模擬無人駕駛汽車通過交叉口時根據信號燈變化作出正確駕駛動作的目的.無人駕駛汽車在實現完全化獨立行駛路權過程中避免不了無人駕駛和傳統人工駕駛混合行駛的過渡階段.王白凡等[39]運用VISSIM 軟件進行混合交通環境下無人駕駛汽車是否接受編隊管控的仿真,無人駕駛車輛在接受管控后會自動與交叉口信號燈進行實時通信,并根據整條街道的運行情況提供效率最優的通行方案,另外,駕駛員也可以根據自身情況和實時路況接控車輛.
為實現無人駕駛汽車的安全行駛,除了在交叉口與交通信號燈進行信息交互以外,還需要車輛智能控制系統完成路徑規劃、路徑導航、速度引導、規避障礙物等一系列操作.宋振偉[40]采用Mentor 公司的Modelsim 軟件進行仿真,實現無人駕駛汽車的車道線跟隨、保持安全行車距離、規避路障和自動超車等功能的模擬.林泓熠等[41]采用LGSVL-Autoware 聯合仿真來解決在無人駕駛車輛定位時需要編寫大量代碼、實時通信能力較差等難題,進行無人駕駛汽車在典型交通場景下的避障和路徑規劃.
另外,鑒于PreScan 軟件建立的場景具有可視、快速、方便、易修改等優點,并且CarSim 軟件可實現與Simulink 軟件的相互調用,王楠等[42]開展了上述3 個軟件平臺的聯合仿真,根據所提出的控制算法建立相應的Simulink 模型,并結合CarSim 車輛模型與Prescan 建立的仿真場景,驗證了定速巡航、穩態跟隨、接近前車、強加速、強減速和避撞等不同工況下ACC(adaptive cruise control)系統的模式劃分方法與控制算法的適應性.
4.2 無人駕駛實車測試和場地設施建設
4.2.1 無人駕駛實車測試
在國外,美國國防高級研究計劃局(Defense Advanced Research Projects Agency,DARPA)于2004 年、2005 年和2007 年舉辦了3 屆無人駕駛汽車長距離比賽,參賽隊伍在開賽前5 min 收到需要完成車輛交匯、規避動態或靜態障礙物等項目,同時增加無人駕駛車輛和常規車輛的交通量以創造一個接近實際情況的交通環境,該賽事旨在促進無人駕駛車輛技術的開發.2010 年,德國布倫瑞克工業大學Stadtpilot 團隊在所在城市布倫瑞克的開放道路上展示了其無人駕駛汽車Leonie,Leonie 利用高精度地圖和C2X(car-to-X)通信來識別交通燈的狀態,以此來控制車輛的自動運行.2013 年,卡內基梅隆大學在車輛上安裝了攝像頭探測交通燈,利用V2I 的方式獲取信號燈配時信息,并花了一年多時間在開放道路上測試該無人駕駛汽車.同年,德國梅賽德斯-奔馳公司測試了自動駕駛汽車Bertha,Bertha 配備了視覺和雷達傳感器識別并檢測交通燈狀態,結合準確的數字地圖,全面獲取復雜道路環境信息,但對于距離50 m 以上的交通燈需要提高識別精準率.谷歌無人駕駛項目于2009 年正式啟動,2016 年該項目發展成為谷歌旗下的子公司Waymo,經過2 000 萬英里開放道路以及100 億英里模擬仿真測試,2022 年3 月初,美國加州公共事業委員會向谷歌公司發放了自動駕駛客運服務許可證,允許在舊金山及周邊地區提供全天24 h、限速為65 km/h的自動駕駛出租車收費客運服務.
在國內,為緩解交通擁堵等問題和搭建具有自主感知、控制、決策的無人駕駛汽車平臺,國家自然科學基金委員會決定從2009 年起,每年舉辦一屆“中國智能車未來挑戰賽”以檢驗無人駕駛汽車在真實環境中的研究成果,從2009 年到2013 年,比賽內容從識別標志標線/交通信號燈、規避障礙物/行人等簡單項目到添加了交通擁堵、臨時施工、拱橋、隧道等各種復雜項目.2018 年,百度在美國硅谷向媒體展示自動駕駛汽車Apollo 實現載人運行成果,在城市道路上完成識別交通信號燈、規避障礙物、掉頭等駕駛動作.2021 年,廣州正式啟動無人駕駛汽車與傳統汽車混行試點,加快了無人駕駛技術的落地應用和商業化進程.
4.2.2 無人駕駛道路建設
無人駕駛車輛除了智能系統的應用,還需要與之相匹配的道路基礎設施,美國加利福尼亞州作為全球首個為無人駕駛汽車制定法規的州郡,2019 年提出了建設自動駕駛專用車道的倡議.同樣,在2019 年11 月的 “第七屆中韓汽車產業發展研討會”上,韓國汽車產業協會室長表示,適應無人駕駛車輛的道路基礎設施和通信設施將在2024 年完成.與此同時,國內也加緊步伐建設為無人駕駛汽車服務的基礎設施,并且一部分基礎設施已經投入實際應用當中.
無人駕駛道路設施的建設可以分為開放運行道路和實驗測試道路.1)對于實驗測試道路,國內外有多個地區都建設了無人駕駛車輛測試專用道路,2015 年7 月,位于密歇根州安娜堡市的無人駕駛虛擬之城Mcity 正式對外開放,Mcity 內設置有數英里的兩車道、三車道和四車道公路供無人駕駛車輛實驗,測試無人駕駛汽車及V2X 技術.2016 年,上海成功投入使用國內第一個智能網聯汽車試點示范區,該示范區搭建了封閉測試區、開放測試區、典型城市道路測試區以及城際走廊4 個階段實驗場景.2019 年12 月,中國汽研智能網聯汽車試驗基地(大足基地)落成,基地內建設有一條長1 450 m、寬12 m 的智能網聯汽車專用測試道路,可開展輔助駕駛系統、網聯功能、車路協同應用、環境感知等測試項目.2)對于開放運行道路,2021 年8 月,海南智能網聯試驗場正式開放,該試驗場提供總長129.2 km的開放道路用于無人駕駛測試,包含7 段普通道路和1 段高速公路.京雄高速公路通過車路協同技術助力智慧運營和自動駕駛,目前該項目河北段已經建成通車,北京段完成了60%建設進度,全線建成后最內側雙向車道擬設置“自動駕駛車道”,將滿足自動駕駛車輛在高速公路的實車測試需求.重慶市于2018 年4 月開放了兩江新區智能汽車與智能交通應用示范區,開放測試范圍劃定為禮嘉環線,總長為12.5 km.2019 年7 月,位于重慶市渝北區仙桃國際大數據谷的5G 自動駕駛開放道路示范運營基地建成,區域內設置了4.3 km 的自動駕駛車道.自2020 年起,湖南長沙、江蘇無錫、重慶永川、河南鄭州、廣州珠江新城等地對選定的開放道路進行打造升級,建設智慧路側系統和智慧公交線路,實現了自動駕駛巴士(公交)在開放道路上的運營,但均是低速行駛公交.
5 挑戰以及展望
5.1 面臨的挑戰
人工智能和物聯網技術給汽車行業帶來巨大影響,更高等級的駕駛輔助系統使汽車變得更加智能化,如今越來越多的汽車企業與科研機構合作研發無人駕駛相關技術.但無人駕駛車輛未能推廣普及,一方面原因是一些關鍵技術和相關法律還沒有突破瓶頸,包括技術瓶頸和法律、道德等非技術瓶頸;另一個重要的原因是服務無人駕駛車輛的道路基礎設施還未成型,以及相關的道路設施技術標準不夠完善.因此,面臨的挑戰如下:
1)物理基礎設施研究薄弱.現有的相關研究主要是圍繞車路協同技術,包括路側設備感知、通信、信息交互、邊緣計算等.相比之下,物理基礎設施的研究較少,一些與無人駕駛汽車相匹配的道路基礎設施仍處于試驗階段,如適應無人駕駛車輛的道路幾何設計、互通立交設計、交通標志標線等.自動駕駛車道雖討論已久,但目前仍未見有高速公路或是快速路項目將專用車道付諸實踐.
2)跨越式發展難度大.無人駕駛車輛滲透率的增加,對提高交通流穩定性、降低混行中人工駕駛車輛耗油量、縮減擾動消散時間等方面有積極作用.然而,目前無人駕駛試驗和測試僅在封閉區域內開展,現有道路設施還不能完全滿足無人駕駛車輛開放式運行的最高要求,因此,無人駕駛汽車與常規車輛混行是不可跨越的過渡階段.
3)自動駕駛技術難以適應復雜場景.目前國內自動駕駛技術尚停留在L2 或者L2+水平,即駕駛輔助系統能實現簡單場景(比如低干擾的高速公路和快速路)的自適應巡航、車道保持、自動變道等功能,但操縱過程還是要以駕駛人為主導.目前,自動駕駛汽車的環境感知準確率仍需進一步提高,無法達到L3 級自動駕駛的商用,而且即便L3 級自動駕駛車輛上路,當車輛脫離符合條件的場景時,也需要駕駛人重新接管車輛,存在較大的安全風險.與此同時,L4 級和L5 級自動駕駛技術久攻不下.中國2/3 地區都是山區,山區道路線形復雜、坡陡彎急、氣象復雜,對L4 和L5 級自動駕駛提出了更高的安全性要求.
4)道路設施技術標準體系不夠完善.目前國內出臺了《國家車聯網產業標準體系建設指南》,以及處在征求意見階段的《公路工程適應自動駕駛附屬設施總體技術規范》《道路交通車路協同信息服務通用技術要求》等行業標準,上述標準在基礎類設施、道路設施、車路交互、管理與服務、網絡安全等方面對適應未來無人駕駛車輛的道路設施提出整體框架,但在具體的操作層面和實施層面還不夠完善,包括無人駕駛專用車道劃分、標志標線設計、路側通信單元布設、互通立體、幾何線形設計等道路基礎設施設計標準還未具體制定.
5)車路交互信息的安全問題.適應無人駕駛車輛的路側數字化基礎設施與車載信息處理系統之間通過云端計算機進行數據傳輸與外界交互,一方面的隱患是數字化基礎設施傳輸道路基礎信息存在延遲、網絡不穩定等基本問題,進而造成無人駕駛車輛接收信息延遲或者錯誤的情況;另一方面,如果沒有高效的數據傳輸方案和安全防護措施,車輛與路側設施之間信息交互以及信息采集、儲存、處理系統存在被攻擊的風險.
5.2 展 望
1)道路設施數字化.道路設施數字化是未來無人駕駛汽車普及的一個重要支撐.一方面,鋪設智能路側單元,便于無人駕駛汽車與數字化道路設施之間通過射頻識別、微波雷達識別、智能傳感器識別等技術實現實時信息共享;另一方面,可以使用以二維碼等數字化信息為基礎的特殊顏色、字符、圖形來改造現有交通標志標線,并將這些變化信息存儲、發布給無人駕駛車輛.無人駕駛車輛行駛在夜間、雨霧天、下雨天以及其他多變復雜的道路環境中,數字化道路設施顯得更加有效,能更大程度減輕車載感知系統的任務和工作復雜度.
2)提高復雜環境感知精準性.目前,只在封閉路段或者是車輛很少的路段開展無人駕駛實驗,在未來,為了服務無人駕駛車輛,除了在高速公路、城市快速路等簡單的基礎場景搭建車路協同環境外,還應提高復雜道路場景的感知能力,比如山區環境中的長隧道、長下坡、連續急轉彎道路,以及城市道路的多層高架、復雜立交、畸形路口等場景;同時,提高雨雪、霧霾、強光等惡劣氣象條件的目標感知準確率,為無人駕駛車輛適應復雜多變環境的路況提供實驗支撐和理論依據.
3)鋪設無人駕駛專用道.未來匹配無人駕駛的道路設施將是一個集環境感知、信息交互、規劃決策等功能于一體的智能道路綜合體.目前無人駕駛專用道設置僅局限在特定區域,如港口道路、工業園區、景區等,主要用于低速自動駕駛貨車和低速自動駕駛巴士;但隨著自動駕駛技術逐漸成熟,為滿足無人駕駛車輛的快速行駛需求,需要在公共道路上設置無人駕駛專用車道,以降低感知環境的復雜度,提高無人駕駛的運行速度和安全性.未來更多的研究將建立在專用道的基礎設施設計、鋪設實施條件以及交通組織等方面.
4)建立相對完善的自動駕駛道路設施技術標準體系.雖然困難重重,但未來某個時點定會攻克無人駕駛L4 和L5 級難關,而在此之前需要考慮適應無人駕駛車輛高速行駛的道路基礎設施設計,建立相對完善的技術標準體系,以便新建道路在設計時充分考慮無人駕駛的需求,同時,也能改造現有道路基礎設施以滿足L4 級無人駕駛的要求.
5)發展應用泛在物聯網.泛在物聯網中5G 技術和IPv6(internet protocol version 6)技術的發展是物聯網發展的基礎,而物聯網又是未來技術的必然發展趨勢.無人駕駛車輛通過物聯網技術將識別采集的信息傳輸到云端,并將處理的信息指令傳輸到決策系統,通過泛在物聯網實現全面感知和泛在互聯,快速高效實現車輛間信息傳輸與處理.將物聯網技術融合到智能汽車領域,基于現代通信技術和計算機技術,實現車與X(everything)之間實時對接,提高自動駕駛能力.
致謝:重慶東站交通樞紐站前片區科研項目(E1210268).
猜你喜歡
人民交通(2020年22期)2020-11-26 07:36:44
小學生優秀作文(低年級)(2020年4期)2020-07-24 08:31:08
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車與安全(2019年8期)2019-09-26 04:49:10
汽車與安全(2019年5期)2019-07-30 02:49:51
汽車觀察(2019年2期)2019-03-15 06:00:06
汽車與新動力(2018年2期)2018-05-09 00:31:56
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50