邊破壞對多智能體系統(tǒng)能控性的影響
2023-12-18 05:53:30肖朋朋紀(jì)志堅(jiān)
電子設(shè)計(jì)工程 2023年24期
肖朋朋,紀(jì)志堅(jiān)
(1.青島大學(xué) 自動化學(xué)院,山東青島 266071;2.山東省工業(yè)控制重點(diǎn)實(shí)驗(yàn)室,山東青島 266071)
隨著社會的發(fā)展和科技的進(jìn)步,國內(nèi)外眾多學(xué)者對多智能體系統(tǒng)的研究逐步深入,網(wǎng)絡(luò)拓?fù)錇檠芯慷嘀悄荏w系統(tǒng)提供了一種分析工具。近年來,多智能體系統(tǒng)不僅在控制領(lǐng)域,在無人機(jī)編隊(duì)等領(lǐng)域[1-8]也進(jìn)行了深入研究。
能控性概念是上個世紀(jì)60 年代由卡爾曼首次提出,2004 年能控性的概念被引入到多智能體的研究當(dāng)中。近些年,多智能體系統(tǒng)研究取得了顯著的成就,如自適應(yīng)控制[9-11]、博弈控制[12-14]、切換系統(tǒng)[15]等都已應(yīng)用于多智能體系統(tǒng)中。一類邊集失效對復(fù)雜網(wǎng)絡(luò)能控性的影響已經(jīng)有過討論[16],但不同類型的邊失效對多智能體系統(tǒng)能控性的影響,以及對拉普拉斯矩陣秩的影響,目前還沒有給出確切的結(jié)論。因此,為了解決此問題,將系統(tǒng)中的邊進(jìn)行分類,并從理論層面給出不同類型的邊失效對系統(tǒng)能控性影響的確切結(jié)論。文中提出了一種邊的分類方式,將多智能體系統(tǒng)中的邊分為三種類型,邊組合分為四種組合類型,并提供了一種辨識邊類型的算法,給出了不同類型的邊失效后系統(tǒng)能控性的變化規(guī)律。同時,為了保證邊失效后的系統(tǒng)是能控的,給出了領(lǐng)導(dǎo)者的選擇方法,最后通過實(shí)例驗(yàn)證了結(jié)論。
1 預(yù)備知識
1.1 圖論知識
對于含有N個節(jié)點(diǎn)的多智能體系統(tǒng)G(A)=(V,E,A),其中V={v1,v2,…,vN} 表示系統(tǒng)的節(jié)點(diǎn)集,E={e1,e2,…,eN}表示系統(tǒng)的邊集,A=[aij]∈RN×N表示加權(quán)鄰接矩陣,aij表示節(jié)點(diǎn)j對節(jié)點(diǎn)i的影響程度,若無特殊說明,aij=1。文中不考慮存在自環(huán)的情況,即(vi,vi)?E。Ni={j∈V∣(j,i)∈E}表示節(jié)點(diǎn)i的鄰居集合。在有向圖G中,對于不同的節(jié)點(diǎn)i、j,都有一條從i開始到j(luò)結(jié)束的定向路徑,則稱圖G為強(qiáng)連通圖。di=||Ni表示節(jié)點(diǎn)i的度,有向圖G的度矩陣為D(G)=diag(d1,d2,…,dN)。拉普拉斯矩陣(Laplacian matrix)是相較于度矩陣的另一種表達(dá)圖中頂點(diǎn)關(guān)系的矩陣,拉普拉斯矩陣可以用L(G)=D(G)-A(G)表示。
1.2 數(shù)學(xué)符號
R表示實(shí)數(shù)集,Rn表示n維實(shí)向量空間。XY表示屬于X但不屬于Y的集合,I為單位矩陣,O表示文中合適維度的零矩陣,?表示空集。
1.3 系統(tǒng)模型
其中,L∈RN×N為拉普拉斯矩陣,B∈RN×P為外部控制輸入矩陣。
對于線性時不變系統(tǒng)(1),若存在一個分段連續(xù)的輸入u(t)能夠在有限時間[t0,tf]內(nèi)使得系統(tǒng)從任意初始狀態(tài)轉(zhuǎn)移到任意終止?fàn)顟B(tài),則稱此系統(tǒng)的狀態(tài)是完全能控的。可以通過能控性判據(jù)來判斷系統(tǒng)是否是能控的,即系統(tǒng)完全能控的充分必要條件是矩陣C=[B,LB,…LN-1B] 滿秩,即rankC=N。此時,我們稱該系統(tǒng)是完全能控的。
定義1對于有向圖G的一個子圖G′,如果G′為單向強(qiáng)連通環(huán)圖,且對于任意j∈V/V′,i∈V′,都有(i,j)?E,強(qiáng)連通子圖G′整體只有單個輸入,這種結(jié)構(gòu)稱為InSCC。在文中將InSCC 結(jié)構(gòu)外且沒有入度的節(jié)點(diǎn)作為初始節(jié)點(diǎn),即節(jié)點(diǎn)1 為初始節(jié)點(diǎn),如圖1所示。
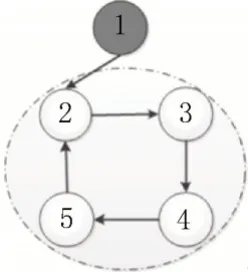
圖1 InSCC結(jié)構(gòu)
2 多智能體系統(tǒng)中邊的分類辨識
在含有InSCC 結(jié)構(gòu)的多智能體系統(tǒng)中,邊失效后,系統(tǒng)的能控性怎樣變化以及如何再次選擇領(lǐng)導(dǎo)者保證系統(tǒng)能控,都是十分有意義的問題。
2.1 多智能體系統(tǒng)中邊的分類
含有InSCC 結(jié)構(gòu)的多智能體系統(tǒng)通常由節(jié)點(diǎn)和有向邊組成,其中節(jié)點(diǎn)存在三種類型,邊也存在三種類型。
2.1.1 邊的分類
類型1:如圖2(a)所示,對于多智能體系統(tǒng)中的一條邊,如邊(v1→v2),如果和初始節(jié)點(diǎn)相連,則這條邊為關(guān)鍵邊,記作xK。
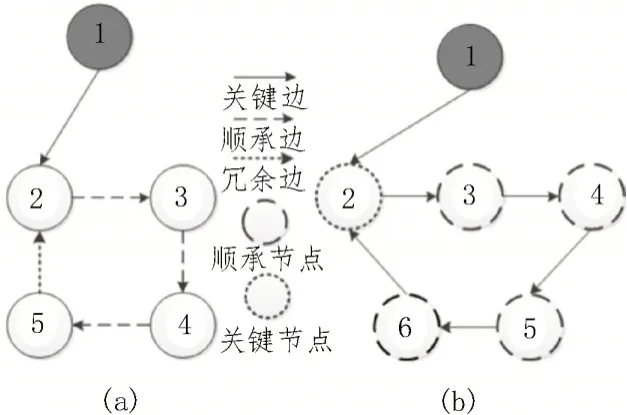
圖2 節(jié)點(diǎn)和邊在網(wǎng)絡(luò)中的關(guān)系
類型2:如圖2(a)所示,對于多智能體系統(tǒng)中的一條邊,如邊(v2→v3)或(v3→v4),如果一條邊由關(guān)鍵節(jié)點(diǎn)指向順承節(jié)點(diǎn)或者由順承節(jié)點(diǎn)指向順承節(jié)點(diǎn),則這條邊為順承邊,記作xF。
類型3:如圖2(a)所示,對于系統(tǒng)中的一條邊,如邊(v6→v2),如果一條邊由順承節(jié)點(diǎn)指向關(guān)鍵節(jié)點(diǎn),則這條邊為冗余邊,記作xR。
2.1.2 節(jié)點(diǎn)分類
類型1:如圖2(b)所示,對于多智能體系統(tǒng)中的一個節(jié)點(diǎn),獨(dú)立于InSCC 結(jié)構(gòu)外且沒有入度的節(jié)點(diǎn)作為初始節(jié)點(diǎn),如節(jié)點(diǎn)1。
類型2:如圖2(b)所示,對于多智能體系統(tǒng)中的一個節(jié)點(diǎn),和初始節(jié)點(diǎn)相連的邊指向的節(jié)點(diǎn)為關(guān)鍵節(jié)點(diǎn),如節(jié)點(diǎn)2。
類型3:如圖2(b)所示,對于多智能體系統(tǒng)中的一個節(jié)點(diǎn),順承邊指向的節(jié)點(diǎn)為順承節(jié)點(diǎn),如節(jié)點(diǎn)3、4、5 和6。
2.2 多智能體系統(tǒng)中邊組合失效類型
根據(jù)節(jié)點(diǎn)和邊的類型,對不同邊的組合進(jìn)行分類,每個組合有且僅有兩條邊。
類型1:關(guān)鍵邊和順承邊遭到破壞而失效,則失效組合為關(guān)鍵邊-順承邊組合,記xK-F。
類型2:關(guān)鍵邊和冗余邊遭到破壞而失效,則失效組合為關(guān)鍵邊-冗余邊組合,記xK-R。
類型3:順承邊和順承邊遭到破壞而失效,則失效組合為順承邊-順承邊組合,記xF-F。
類型4:順承邊和冗余邊遭到破壞而失效,則失效組合為順承邊-冗余邊組合,記xF-R。
2.3 邊組合的辨識算法
為了更好地探究邊失效對多智能體系統(tǒng)能控性的影響,需要找出多智能體系統(tǒng)中邊的類型,下面給出多智能體系統(tǒng)中邊的辨識算法,具體步驟如下:
Step1:遍歷多智能體系統(tǒng)中的所有節(jié)點(diǎn),如果存在一條邊(vi→vj),其中節(jié)點(diǎn)vi為初始節(jié)點(diǎn),那么由節(jié)點(diǎn)vi指出的邊為關(guān)鍵邊。
Step2:遍歷多智能體系統(tǒng)中的所有節(jié)點(diǎn),如果存在一條邊(vi→vj),其中節(jié)點(diǎn)vi為關(guān)鍵節(jié)點(diǎn)或者為順承節(jié)點(diǎn),節(jié)點(diǎn)vj為順承節(jié)點(diǎn),那么由節(jié)點(diǎn)vi指向節(jié)點(diǎn)vj的邊為順承邊。
Step3:遍歷多智能體系統(tǒng)中的所有節(jié)點(diǎn),如果存在一條邊(vi→vj),其中節(jié)點(diǎn)vi為順承節(jié)點(diǎn),節(jié)點(diǎn)vj為關(guān)鍵節(jié)點(diǎn),那么由節(jié)點(diǎn)vi指向節(jié)點(diǎn)vj的邊為冗余邊。
Step4:搜尋第一條與初始節(jié)點(diǎn)相連接的邊為關(guān)鍵邊,如果第二條邊是從關(guān)鍵節(jié)點(diǎn)或順承節(jié)點(diǎn)vj出發(fā),到順承節(jié)點(diǎn)vj+1結(jié)束,邊(vj→vj+1)為順承邊,則找出關(guān)鍵邊-順承邊組合xK-F,否則進(jìn)行下一步。
Step5:搜尋第一條與初始節(jié)點(diǎn)相連接的邊為關(guān)鍵邊,如果第二條邊是從順承節(jié)點(diǎn)vj出發(fā),到關(guān)鍵節(jié)點(diǎn)vj+1結(jié)束,邊(vj→vj+1)為冗余邊,找出關(guān)鍵邊-冗余邊組合xK-R。
Step6:搜尋第一條邊從關(guān)鍵節(jié)點(diǎn)或順承節(jié)點(diǎn)vi出發(fā),到順承節(jié)點(diǎn)vi+1結(jié)束,邊(vi→vi+1)為順承邊,如果第二條邊是從關(guān)鍵節(jié)點(diǎn)或順承節(jié)點(diǎn)vj出發(fā),到順承節(jié)點(diǎn)vj+1結(jié)束,邊(vj→vj+1) 為順承邊,那么邊(vi→vi+1)與邊(vj→vj+1)的組合為順承邊-順承邊組合xF-F,否則進(jìn)行下一步。
Step7:搜尋第一條邊從關(guān)鍵節(jié)點(diǎn)或順承節(jié)點(diǎn)vi出發(fā),到順承節(jié)點(diǎn)vi+1結(jié)束,邊(vi→vi+1)為順承邊,如果第二條邊是從順承節(jié)點(diǎn)vj出發(fā),到關(guān)鍵節(jié)點(diǎn)vj+1結(jié)束,邊(vj→vj+1)為冗余邊,那么邊(vi→vi+1)與邊(vj→vj+1)的組合為順承邊-冗余邊組合xF-R。
3 邊失效對多智能體系統(tǒng)能控性影響
定理1 對于含有N個節(jié)點(diǎn)的多智能體系統(tǒng),其中含有n個不同的InSCC 結(jié)構(gòu)。
1)當(dāng)失效n條關(guān)鍵邊時,多智能體系統(tǒng)的能控子空間維數(shù)降低。rank(LK)=N-n-1,LK為丟失關(guān)鍵邊后的拉普拉斯矩陣。保證丟失n條關(guān)鍵邊后的多智能體系統(tǒng)是能控的,需要選擇初始節(jié)點(diǎn)和n個關(guān)鍵節(jié)點(diǎn)為領(lǐng)導(dǎo)者。
2)當(dāng)失效n條順承邊時,多智能體系統(tǒng)的能控子空間維數(shù)降低。其中每個InSCC 結(jié)構(gòu)失去一條順承邊,rank(LF)=N-n-1,LF為丟失順承邊后的拉普拉斯矩陣。保證丟失n條順承邊后的多智能體系統(tǒng)是能控的,需要對初始節(jié)點(diǎn)和n個失效順承邊指向的順承節(jié)點(diǎn)施加外部控制輸入。
3)當(dāng)失效n條冗余邊時,多智能體系統(tǒng)的能控性保持不變,對應(yīng)的拉普拉斯矩陣LR的秩不變。當(dāng)選擇初始節(jié)點(diǎn)為領(lǐng)導(dǎo)者時,多智能體系統(tǒng)能控性保持不變。
證明:1)當(dāng)n條關(guān)鍵邊失效時,其所對應(yīng)的拉普拉斯矩陣為:
因?yàn)橄到y(tǒng)含有n個不同的InSCC,所以矩陣LKi的維數(shù)不相同。接下來計(jì)算在矩陣LK的特征值中零特征值的重?cái)?shù):
其中,LK0=0,每個|λI-LKi|中存在一個特征值λ=0,所以在LK的特征值中,λ=0 的重?cái)?shù)為n+1,即rank(LK)=N-n-1。
當(dāng)選擇初始節(jié)點(diǎn)為領(lǐng)導(dǎo)者時,關(guān)鍵邊失效后的系統(tǒng)存在N-1 個輸入不可達(dá)節(jié)點(diǎn),系統(tǒng)的能控子空間維數(shù)降低。根據(jù)InSCC 結(jié)構(gòu)的特性,當(dāng)多智能體系統(tǒng)中所有的節(jié)點(diǎn)輸入可達(dá)時,系統(tǒng)能控。保證丟失n條關(guān)鍵邊后的多智能體系統(tǒng)是能控的,選擇輸入矩陣B=[bK0,bK1,…,bKn],其 中bK0=[1,0,…,0]T,bKi=[0,…,?,…,?]T,bKi∈RN×1,i∈{1,2,…,n} 。當(dāng)在關(guān)鍵節(jié)點(diǎn)施加外部控制時,?=1,否則?=0,此時丟失關(guān)鍵邊后的系統(tǒng)所有節(jié)點(diǎn)是輸入可達(dá)的,系統(tǒng)能控。
2)當(dāng)n條順承邊失效時,其中每個InSCC 結(jié)構(gòu)失去一條順承邊。根據(jù)拉普拉斯矩陣行和為零的性質(zhì),拉普拉斯矩陣LF中出現(xiàn)n+1 個全零行,丟失n條順承邊后的拉普拉斯矩陣LF的秩減少n,因此有rank(LF)=N-n-1。保證丟失n條順承邊后的多智能體系統(tǒng)是能控的,則需要選擇輸入矩陣B=[bF0,bF1,…,bFn],其中bF0=[1,0,…,0]T,bFi=[0,…,*,…,*]T,bFi∈RN×1,i∈{1,2,…,n} 。當(dāng)對失效順承邊指向的順承節(jié)點(diǎn)施加外部控制輸入時,*=1,否則*=0,此時系統(tǒng)能控。
3)當(dāng)n條冗余邊失效時,拉普拉斯矩陣LR中仍有N-1 線性無關(guān)的行向量,LR與冗余邊失效前的拉普拉斯矩陣具有相同的秩。當(dāng)選擇初始節(jié)點(diǎn)為領(lǐng)導(dǎo)者時,系統(tǒng)中不存在輸入不可達(dá)節(jié)點(diǎn)。因此,冗余邊丟失前后多智能體系統(tǒng)能控性保持不變。
定理2對于一個含有N個節(jié)點(diǎn)的多智能體系統(tǒng),其中含有n個不同InSCC 結(jié)構(gòu),InSCC 結(jié)構(gòu)中節(jié)點(diǎn)數(shù)k≥3 。當(dāng)丟失n組順承邊—順承邊組合(xF-F)時,每個InSCC 中丟失一組xF-F,多智能體系統(tǒng)的能控子空間維數(shù)降低。rank(LF-F)=N-2n-1,LF-F為丟失xF-F后的拉普拉斯矩陣。保證丟失n組xF-F后系統(tǒng)能控,則對初始節(jié)點(diǎn)和失效順承邊指向的順承節(jié)點(diǎn)施加外部控制輸入。
證明:對于只含有n個不同InSCC 的多智能體系統(tǒng),InSCC 結(jié)構(gòu)中節(jié)點(diǎn)數(shù)k≥3。當(dāng)n組邊組合xF-F失效時,其中每個InSCC 結(jié)構(gòu)失去一組xF-F,根據(jù)拉普拉斯矩陣行和為零的性質(zhì),拉普拉斯矩陣LF-F中出現(xiàn)2n+1 個全零行。在LF-F的特征值中,特征值λ=0 的重?cái)?shù)為2n+1,rank(LF-F)=N-2n-1。當(dāng)選擇初始節(jié)點(diǎn)為領(lǐng)導(dǎo)者時,邊組合xF-F失效后的多智能體系統(tǒng)存在輸入不可達(dá)節(jié)點(diǎn),多智能體系統(tǒng)的能控子空間維數(shù)降低。保證丟失n條邊組合xF-F后的多智能體系統(tǒng)是能控的,則需要選擇輸入矩陣B=[bF0,bF1,…,bF2n],其 中bF0=[1,0,…,0]T,bFi=[0,…,*,…,*]T,bFi∈RN×1,i∈{1,2,…,2n}。當(dāng)對失效順承邊指向的順承節(jié)點(diǎn)施加外部控制輸入時,*=1,否則*=0,此時系統(tǒng)能控。
4 實(shí)例驗(yàn)證
圖3(a)所示為只含有一個InSCC 的多智能體系統(tǒng),系統(tǒng)的拉普拉斯矩陣為:

圖3 只含有一個InSCC的多智能體系統(tǒng)中不同類型邊失效
rank(L)=5。
1)當(dāng)丟失一條關(guān)鍵邊后,如圖3(b)所示,系統(tǒng)的拉普拉斯矩陣為:
rank(LK)=4,關(guān)鍵邊失效后系統(tǒng)的拉普拉斯矩陣的秩減少1。保證丟失關(guān)鍵邊后的系統(tǒng)是能控的,則需要選擇初始節(jié)點(diǎn)和關(guān)鍵節(jié)點(diǎn)為領(lǐng)導(dǎo)者,即選擇輸入矩陣BK,此時,根據(jù)系統(tǒng)能控性判據(jù)可知系統(tǒng)能控。
2)當(dāng)丟失一條順承邊后,如圖3(c)所示,系統(tǒng)的拉普拉斯矩陣為:
rank(LF)=4,順承邊失效后多智能體系統(tǒng)的拉普拉斯矩陣的秩減少1。保證丟失順承邊后的多智能體系統(tǒng)是能控的,則需要對初始節(jié)點(diǎn)和失效順承邊指向的那個順承節(jié)點(diǎn)施加外部控制輸入,即選擇輸入矩陣BF,此時,根據(jù)系統(tǒng)能控性判據(jù)可知系統(tǒng)能控。
3)當(dāng)丟失1 條冗余邊后,如圖3(d)所示,拉普拉斯矩陣LR為:
其中,存在五個線性無關(guān)的行向量,因此LR與冗余邊失效前的拉普拉斯矩陣L具有相同的秩。當(dāng)選擇初始節(jié)點(diǎn)為領(lǐng)導(dǎo)者時,系統(tǒng)中不存在輸入不可達(dá)節(jié)點(diǎn),因此,冗余邊丟失前后多智能體系統(tǒng)能控性保持不變。
5 結(jié)論
文中研究了只含有InSCC 的多智能體系統(tǒng)在遭受攻擊或破壞后,不同類型的邊失效對網(wǎng)絡(luò)能控性的影響。當(dāng)關(guān)鍵邊和順承邊失效時,系統(tǒng)拉普拉斯矩陣的秩減少,多智能體系統(tǒng)的能控子空間維數(shù)降低;當(dāng)冗余邊失效時,系統(tǒng)拉普拉斯矩陣的秩不發(fā)生改變,多智能體系統(tǒng)的能控性保持不變;當(dāng)邊組合xF-F失效時,系統(tǒng)拉普拉斯矩陣的秩減少,多智能體系統(tǒng)的能控子空間維數(shù)降低。同時,為了保證不同類型邊以及邊組合失效后的多智能體系統(tǒng)是能控的,給出了領(lǐng)導(dǎo)者的選擇方法。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化(高中版.高考理化)(2021年6期)2021-07-28 06:21:04
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
NBA特刊(2014年7期)2014-04-29 00:44:03