基于多星座GNSS的高軌航天器組合導航性能評估
2023-12-15 08:51:12謝禮偉武領華莊學彬
無線電工程 2023年12期
謝禮偉,石 濤,武領華,莊學彬
(中山大學 系統科學與工程學院,廣東 廣州 510006)
0 引言
近年來,高軌航天器的發射次數、應用服務和任務類型逐漸增多,高軌航天器利用全球導航衛星系統定位是GNSS的重要應用之一[1]。由于GNSS導航衛星最初設計主要是為地面用戶服務,導航衛星的信號基本都指向地球中心,而高軌航天器的軌道高度遠大于GNSS衛星運行軌道高度,因而高軌航天器接收機只能接收到來自地球另一端的信號,這使得導航衛星與高軌航天器之間的距離進一步增加,來自路徑和大氣的損耗導致接收信號的信噪比大幅度降低[2]。 即使高軌航天器可見衛星滿足多GNSS定位解算條件,定位誤差也可高達百米量級。對于太空中處于零重力環境下的高軌航天器,在非機動狀態下可通過軌道積分遞推直接獲得其短期位置,但其誤差均低于GNSS定位結果,因而高軌道航天器通常采取軌道濾波的形式進行定軌計算并利用GNSS的偽距、偽距率等信息對軌道參數進行修正[3]。
隨著北斗三號全球衛星導航系統正式向用戶提供全天時、全天候、高精度的全球定位導航服務,全球有超過120顆能夠提供導航服務的在軌衛星,大量的在軌衛星為高軌航天器定位技術的發展奠定了良好的基礎,同時利用多星座GNSS可以提高可見衛星數,從而有效改善高軌自主定位服務的可用性[4]。對于機動模式下的航天器,可利用加速度計和陀螺儀獲得的加速度數據信息來推算出航天器的短期運動狀態。慣性測量單元 (Inertial Measurement Unit,IMU) 的采樣頻率遠高于GNSS接收機且短期內誤差低于GNSS定位誤差,因此捷聯慣性系統 (Strapdown Inertial Navigation System,SINS)通常作為實時輸出航天狀態信息的主要系統。由于IMU 的噪聲以及長期積分會導致誤差累積,因此常采用GNSS 導航或天文導航來校正SINS的參數[5]。
高精度自主定位是高軌航天器的核心關鍵技術,多星座GNSS的在軌衛星數量多、衛星所在軌道分布廣,且高軌道用戶終端和導航衛星相對動態關系變化快,對導航性能的可用性提出了較大的挑戰。基于以上因素,本文首先對多星座GNSS和北斗三號星座構型進行簡要介紹,然后對高軌航天器的定位系統誤差狀態進行推導以確定衛星導航與慣性導航緊組合的狀態觀測模型,最后通過仿真對比結果證明,超同步轉移軌道(Super-Synchronous Transfer Orbit, SSTO)典型高軌航天器應用高軌緊組合算法可獲得較穩定的定位信息和更高的定位精度。
1 多星座GNSS
與單個衛星系統相比,多星座組合可以增加可見衛星的數量,有效改善衛星的空間幾何結構,提高衛星定位的可靠性[6]。
1.1 多星座系統時間融合
由于BDS、GPS、Galileo、GLONASS四個系統時間都與協調世界時 (UTC) 相關,將其他3個系統的時間都統一為GPST,從而完成多星座時間數據的融合。根據 GPS 接口控制文件中的內容,GPST、GLONASST 的時間基準可以用下式進行轉換[7]:
(1)

tGPS-tGALILEO≈19 s±30 ns。
(2)
根據BDS接口控制文件內容,BDT和GPST的時間基準可以用下式進行轉換:
(3)
(4)
式中:tBDS是北斗時間,A0GPS是2個系統之間的鐘差,A1GPS是2個系統的鐘速差。
1.2 北斗三號星座構型
北斗三號系統的空間星座由 3 顆地球靜止軌道(Geostationary Earth Orbit, GEO)衛星、3顆傾斜地球同步軌道(Inclined GeoSynchronous Orbit, IGSO)衛星和24 顆中圓地球軌道(Medium Earth Orbit, MEO)衛星混合組成[8],如圖1所示。
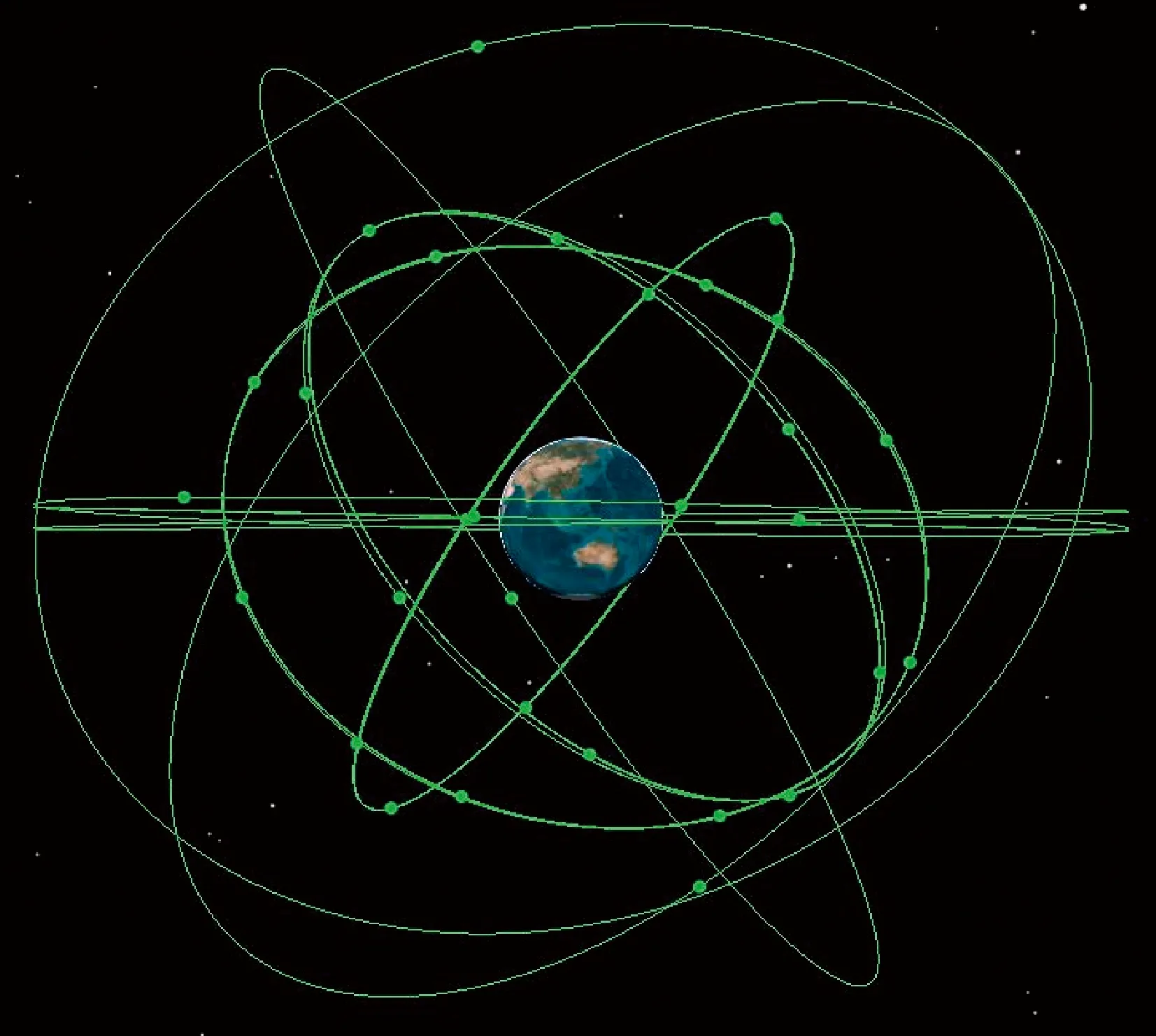
圖1 三維空間結構Fig.1 Three-dimensional spatial structure
GEO衛星的軌道面與地球赤道面重合,星下點相對地面基本保持靜止;IGSO衛星與GEO衛星的軌道高度相同,位于3個軌道面上,星下點相對地面自南向北運動,軌跡呈現“8字型”;MEO衛星星下點相對地面自西向東運動,軌跡呈現“波浪型”。GEO和IGSO衛星的使用可以大大提高北斗系統的導航性能和抗遮擋能力,而MEO衛星可為北斗系統服務全球打下堅實的基礎,提高系統的可靠性和魯棒性[9]。
2 定位系統模型
針對高軌多GNSS連續定位解算難以保障問題,基于偽距、偽距率的高軌緊組合定位算法對高軌航天器的系統誤差狀態進行推導,確定衛星導航與慣性導航緊組合的系統誤差狀態模型。
2.1 緊組合模型
緊組合是一種相對復雜的組合方式,如圖2所示。在該組合方式中,GPS和IMU僅作為測量傳感器,利用IMU輸出的位置和速度信息來估計GPS的偽距和偽距率,并將其與GPS定位原始信息進行比較。觀測方程經過卡爾曼濾波以獲得準確的導航解。
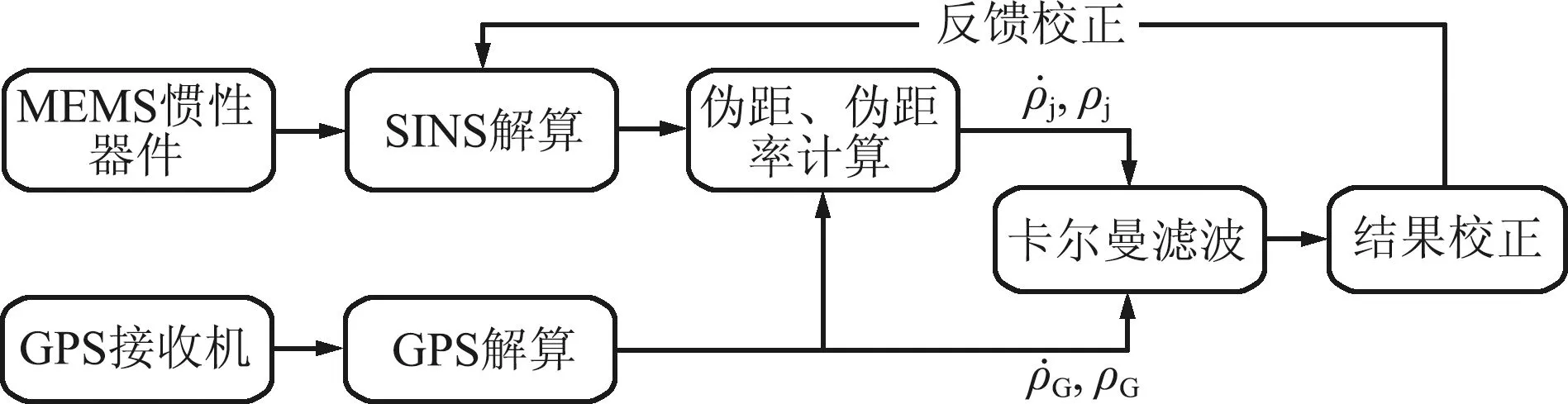
圖2 緊組合模型Fig.2 Tight combination model
相對而言,緊組合導航系統具有更高的導航解算精度。 同時,即使載體移動或受到外部信號干擾,緊組合導航系統也能執行GPS信息有限環境下的導航方案,避免組合導航系統退化成純慣性導航系統,并且使用偽距、偽距率或載波相位等同級信息來修正慣性導航系統對可見星數的要求較低,不需要接收機先單獨完成解算,因此緊組合方式具有更好的實現效果[10]。下文將基于高軌航天器采用多星座導航系統/慣導緊組合方法進行定位性能仿真和評估。
2.2 高軌航天器運動狀態的誤差狀態模型
對于高軌航天器,其運動狀態可用位置、速度、加速度零偏、角速度零偏和姿態進行描述,分別用pi、vi、ab、ωb和θbi表示,其中上角標i代表該值在i系中的矢量值,b則代表機體b系,θbi為機體b系旋轉至i系的旋轉矢量(簡寫為θ)。
將系統狀態的誤差值作為ESKF系統狀態空間向量:
δX=[δpT,δvT,δθT,δaT,δωT,δbT,δd]T。
(5)
系統誤差狀態維數為20。將所有誤差項利用泰勒展開并略去二階以上高階項,進行線性化后得到誤差狀態的微分方程為:
(6)
(7)
(8)
(9)
(10)
(11)
(12)
因而,誤差狀態方程為:
(13)
此時可以得到ESKF的預測公式中狀態轉移矩陣為:
(14)
式中:F33=RT{(ωm-ωb)}×。根據系統噪聲W的定義得到ESKF更新式中的協方差矩陣為:
(15)
2.3 系統觀測模型
對于ESKF來說,需要額外的觀測信息對濾波器進行矯正,在緊組合模型中選取偽距與偽距率作為觀測值。接收機偽距觀測方程為:
(16)
式中:T表示矩陣轉置,ρj表示當前第j顆可見星,pj表示該衛星坐標(i系),p為當前接收機坐標(由于忽略了桿臂誤差,等效為航天器坐標),nρ為對所有衛星相同的白噪聲。
從而,觀測方程寫成:
δZ=HδX+V。
(17)
若當前觀測到n顆衛星,則有:
(18)
式中:衛星編號為1~n。由于當觀測到的n顆衛星可能來自4個不同系統,其量測矩陣寫為:
(19)
式中:Bj(j=1,2,…,n)為1×4維第j顆衛星時鐘偏差分配矩陣,根據衛星所屬系統不同分別取對應列為1,其余列為0。匯總標稱狀態與誤差狀態更新過程,系統運動狀態的更新流程如圖3[13]所示。
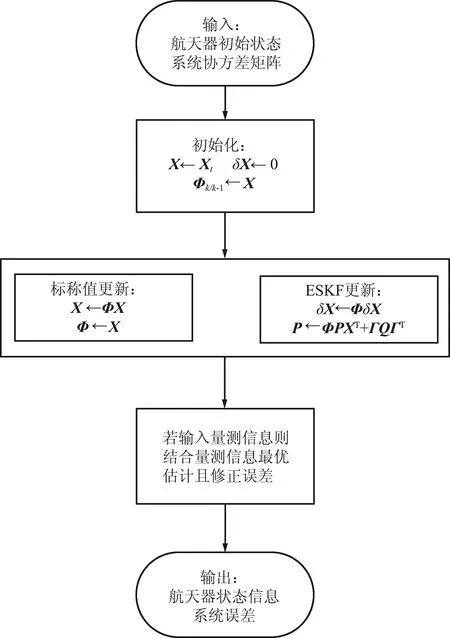
圖3 航天器狀態更新流程Fig.3 Update process of spacecraft status
3 高軌選星算法
典型高軌可見星分布普遍較差,僅依靠幾何分布進行衛星選擇不大適用于高軌多GNSS定位,選星算法旨在提升高軌航天器多GNSS定位時的性能。
3.1 PGA
目前,并行遺傳算法(Parallel Genetic Algorithm,PGA)是一種基于不同種群并行優化的遺傳算法,如圖 4所示,主要有3種模型:主從模型、粗粒度模型和細粒度模型[14]。
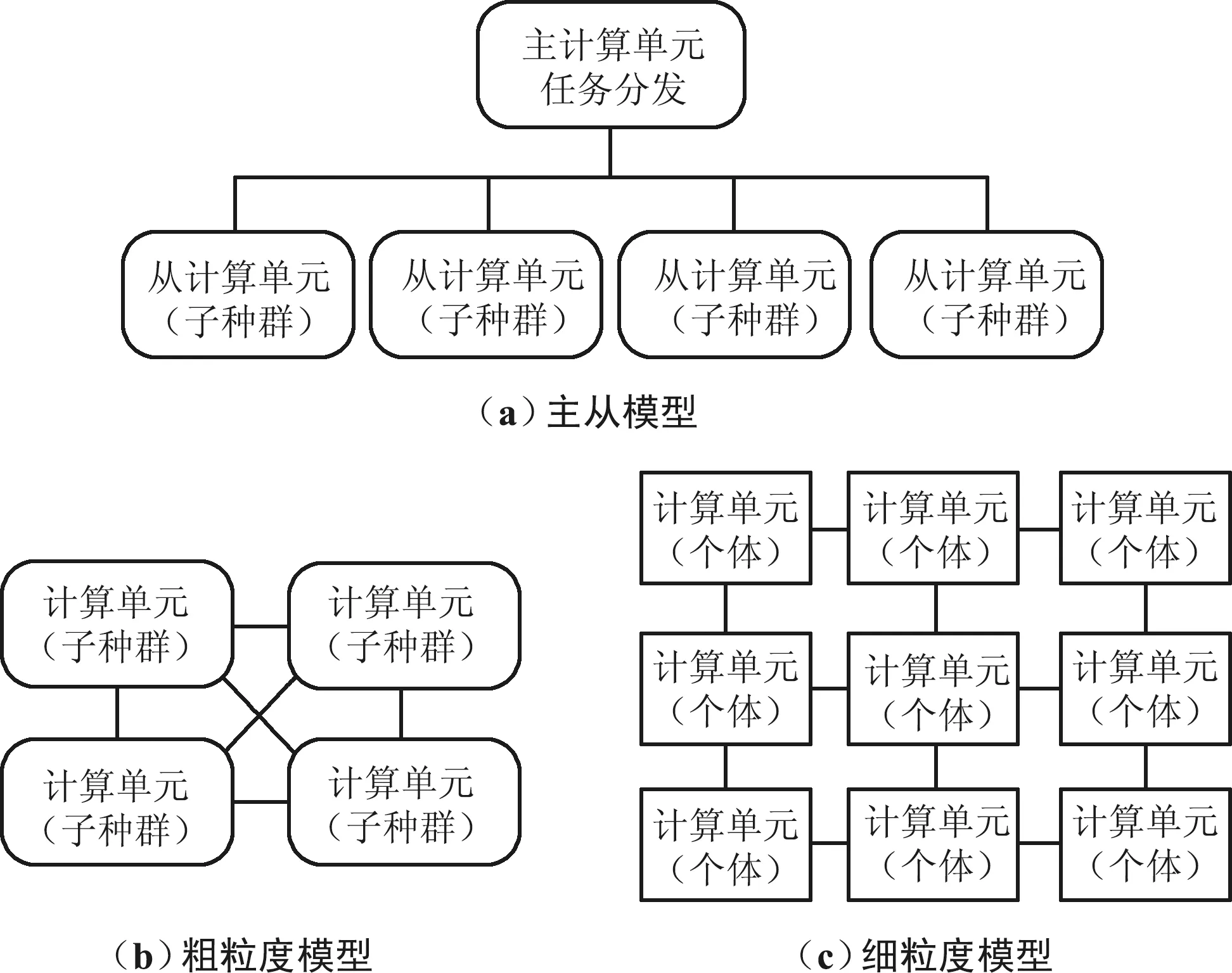
圖4 PGA Fig.4 PGA
3.2 基于并行遺傳的選星算法
航天器機載計算機頻率普遍低于地面工業產品頻率。為了滿足計算要求,現代航天器電子系統主要采用分布式計算結構,用多個處理核心或計算單元完成各種任務[15]。該低頻多核計算結構適應粗粒度模型且實現方法靈活。因此,選擇基于粗粒度模型的PGA。圖5為基于并行遺傳的選星算法流程[16]。
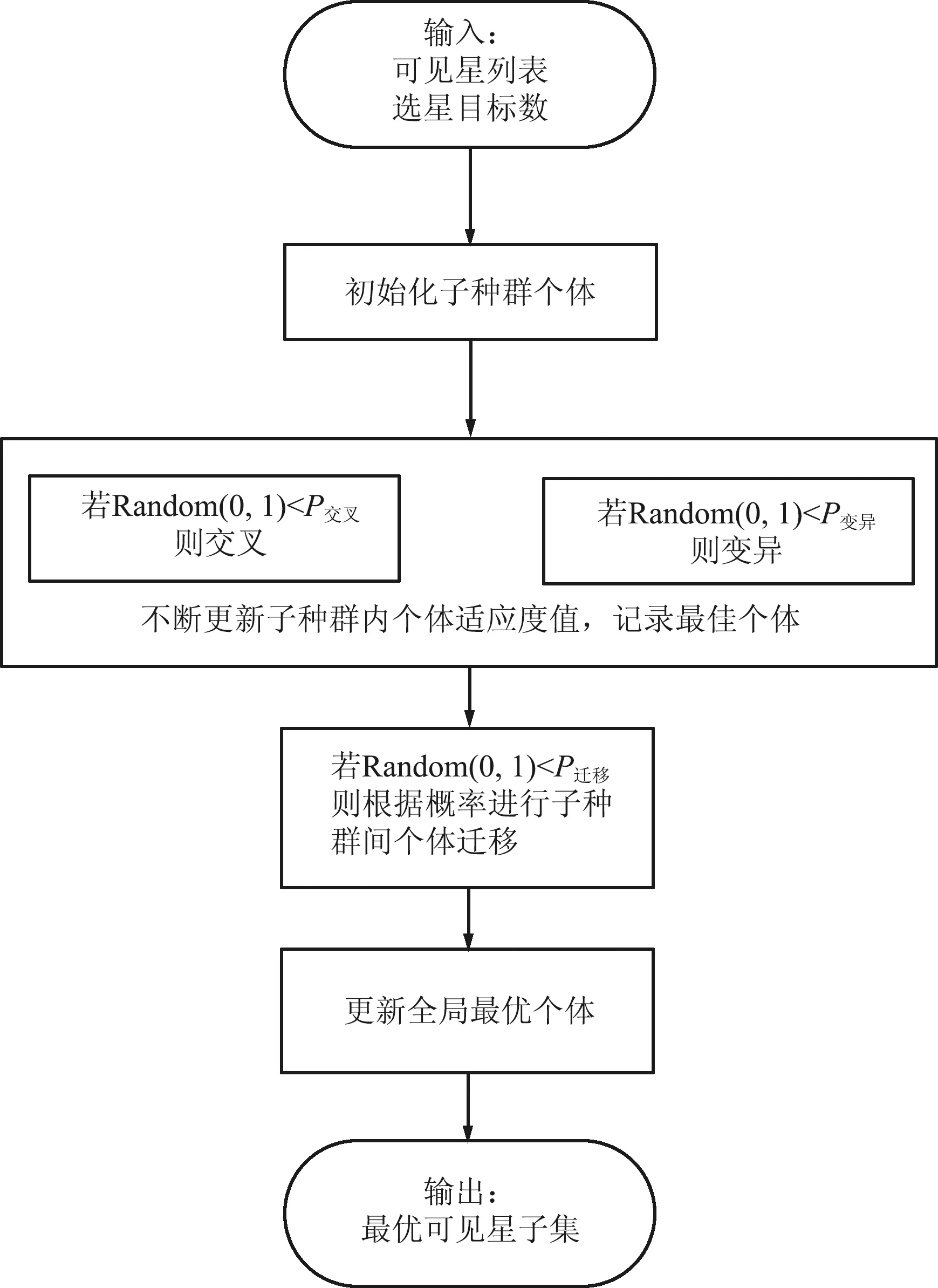
圖5 選星算法流程Fig.5 Process of star selection algorithm
4 實驗及結論
4.1 仿真環境說明
通過仿真軟件Satellite Tool Kit (STK) 分析SSTO航天器在遠地點機動到地球同步軌道期間結合多GNSS與慣導緊組合定位的精度。由于在軌的每顆 GNSS 衛星都在不斷維護和更新,因此可以服務的衛星數量會隨時間而變化,本實驗使用了最新公開發布的GNSS兩行根數 (Two-Line Element) 文件和各系統運行狀態以及各系統建設計劃,模擬生成對應的星座,其具體配置如圖6所示。北斗系統中的同步軌道衛星分為GEO和IGSO兩類。

圖6 多GNSS配置參數Fig.6 Multi-GNSS configuration parameters
航天器初始高度約為71 225 km,初始位置誤差為10 m,速度誤差為0.1 m/s。總仿真時間為11 000 s,慣性導航系統輸出頻率為10 Hz,多GNSS接收機輸出觀測信息頻率為1 Hz。航天器在9 078~10 578 s段以約0.5 m/s2的加速度在恒定推力模式下進行機動。偽距率誤差取0.1 m/s。表1展示了IMU和機載時鐘誤差模型的相關參數[17-20]。仿真硬件采用的處理器為Intel Core i7-10700F @2.90 GHz,采取C++11標準多線程(std::thread)模擬實現多種群的粗粒度并行,仿真程序使用Python3.7編寫。
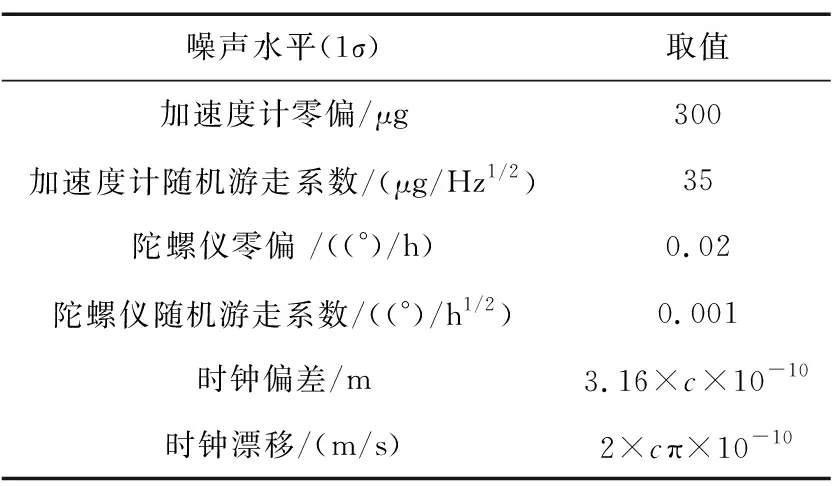
表1 IMU與時鐘誤差模型參數設定值Tab.1 Parameter settings for IMU and clock error model
4.2 可見衛星分布
通常采用方位圖統計分析高軌道航天器一個軌道周期內的可見衛星分布,其中俯仰角θ定義為航天器接收機天線的信號接收角,方位角ψ定義為航天器與衛星的連線與航天器當前速度方向的夾角。θ、ψ的計算如下:
(20)
(21)

(22)
式中:n為航天器接收機此刻位置向徑。
根據同時滿足接收機與導航衛星間幾何可見和接收功率大于門限值來分析SSTO航天器一個軌道周期內的可見衛星統計分布情況,如圖7所示。可以看出,BDS在高軌場景下具有更好的可見星分布(俯仰角范圍更大);與其他系統相比,Galileo的分布不利于高軌道航天器的導航,并且主瓣內缺少部分角度下的分布。結合在軌衛星的實際數據可看出,BDS的GEO/IGSO衛星在優化可見衛星的幾何分布方面發揮了明顯的作用[21]。
4.3 實驗結果分析
圖8和圖9顯示了SSTO航天器使用所有可見衛星進行緊組合定位時軌道的徑向(R)、切向(T)和法向(N)位置和速度誤差值。由圖 10可以看出,500 s和 4 700 s左右的誤差值明顯高于其他時間,比較各時間的平均載噪比,在對應時間接收到的可見衛星信號的載噪比明顯低于其他時間。 這是因為低載噪比會增加接收器的熱噪聲,因而增加了偽距觀測的誤差。
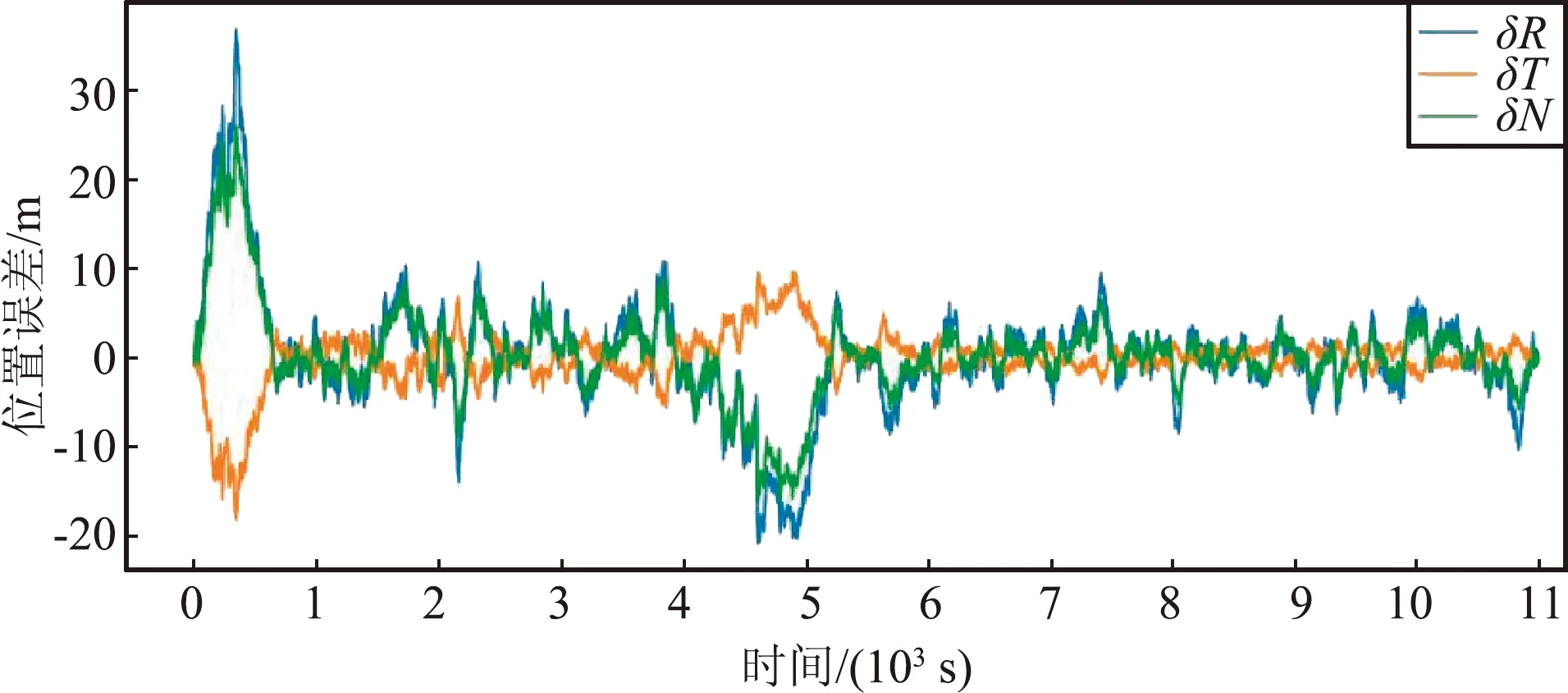
圖8 航天器位置誤差Fig.8 Spacecraft position error
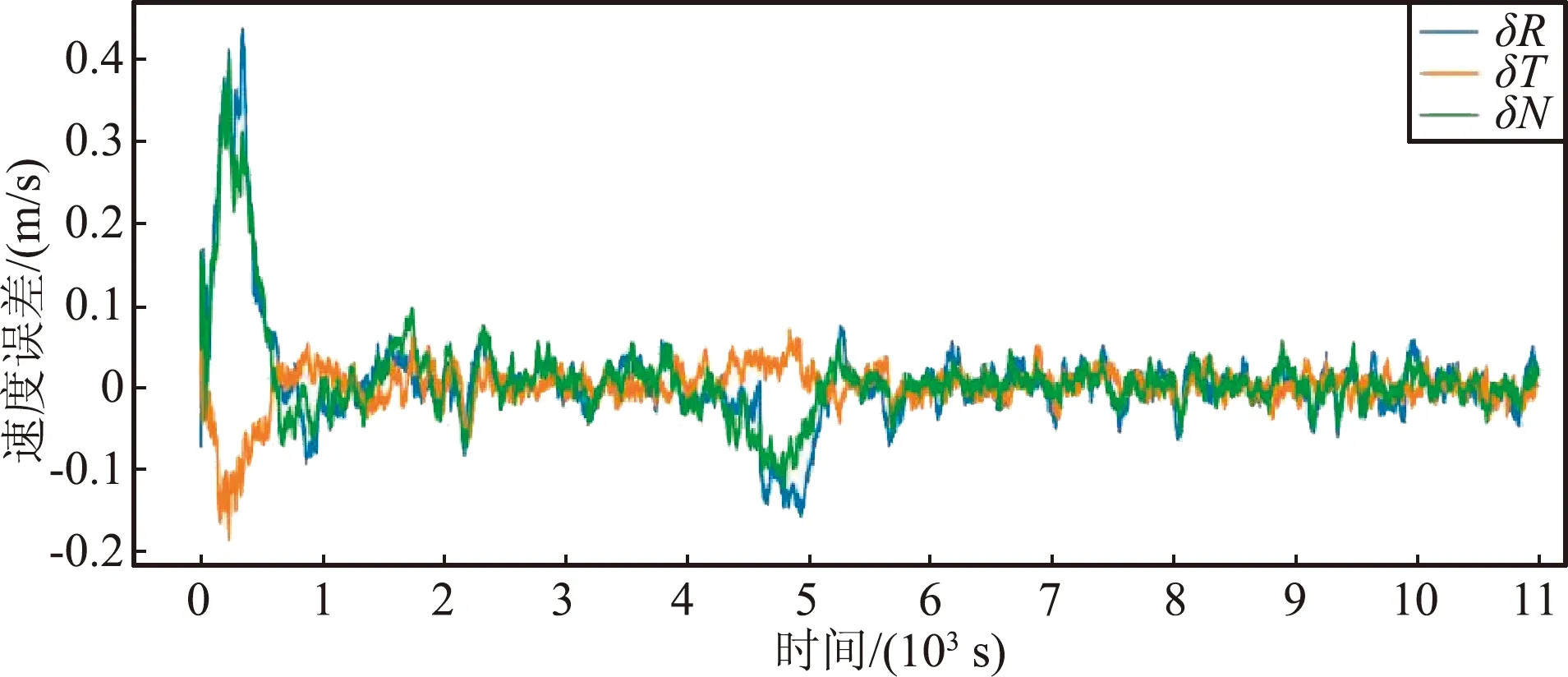
圖9 航天器速度誤差Fig.9 Spacecraft velocity error
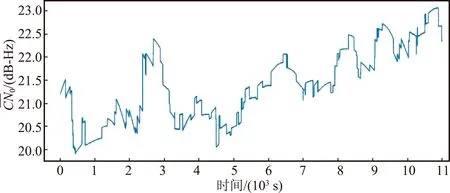
圖10 航天器可見星平均載噪比Fig.10 Average load-to-noise ratio of spacecraft visible star
通過PGA高軌選星算法選出加權精度因子最優的衛星組合作為觀測值輸入ESKF模型,結果如圖11和圖12所示。在選擇的衛星組合替換原來觀測量輸入系統之后,定位系統獲得更低的誤差值。表2顯示了緊組合定位的RMSE值,包括軌道徑向、切線、法線和三維誤差項。
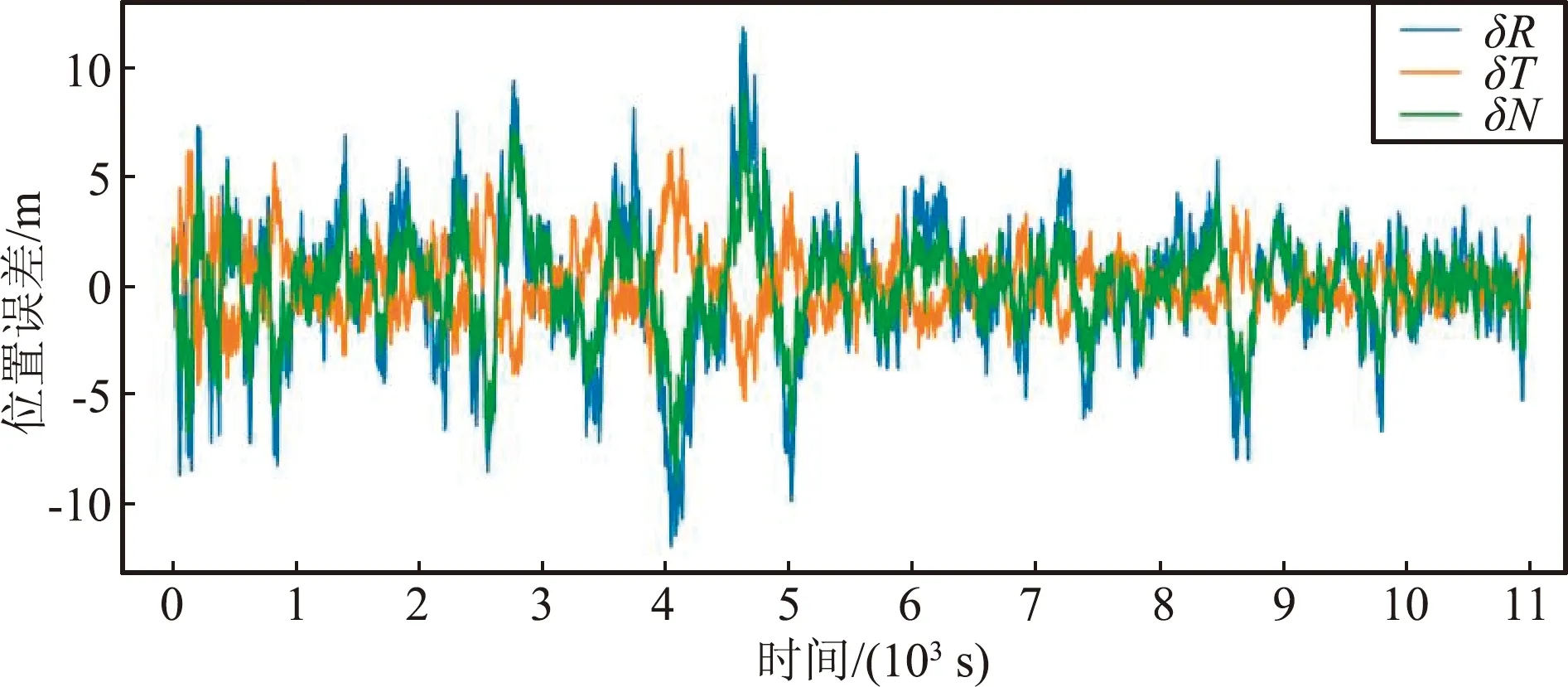
圖11 航天器位置誤差(優化選星)Fig.11 Spacecraft position error (optimized star selection)
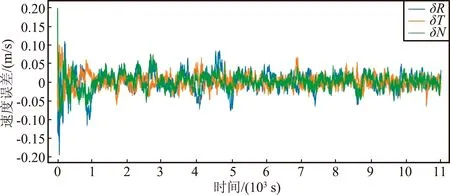
圖12 航天器速度誤差(優化選星)Fig.12 Spacecraft velocity error (optimized star selection)
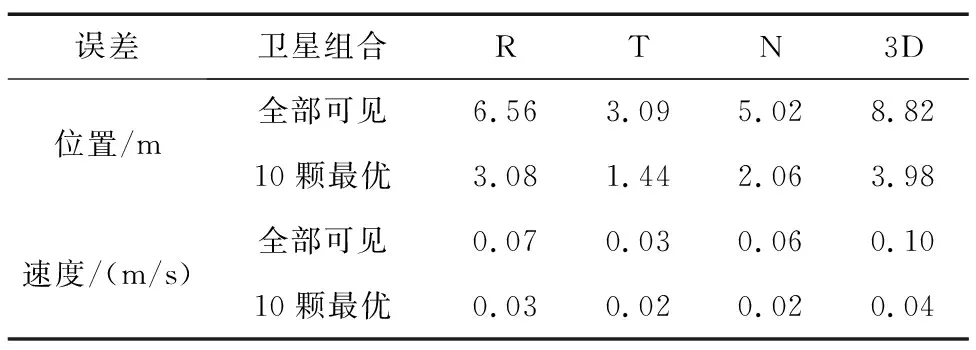
表2 ESKF緊組合定位下徑向、切向、法向與三維誤差值(RMSE)對比Tab.2 Comparison of radial, tangential, normal and three-dimensional error values (RMSE) for ESKF tight combination positioning
圖13對比了基于ESKF的緊組合定位和松組合定位的位置誤差。其中,9 010~9 110 s可見衛星數為2~6顆,不滿足衛星定位方案的要求,此時定位誤差漸漸上升。當滿足解算條件時,松緊組合的誤差處于近似相同水平。當可見衛星數量較少且不滿足解算條件時,緊組合模式可以繼續修正慣性誤差,而松組合模式下誤差持續發散且出現定位較大偏移錯誤。

圖13 緊組合與松組合定位位置誤差對比Fig.13 Comparison of positioning position error between tight combination and loose combination
4.4 實驗結論
基于高軌仿真模型,對SSTO航天器遠地點變軌過程進行緊組合定位仿真驗證。實驗結果表明,典型的高軌航天器在使用多星座GNSS觀測和SINS進行緊組合定位時,可以達到米級定位精度。其中SSTO航天器3D位置 RMSE為8.82 m,3D速度RMSE為0.10 m/s。將PGA選星算法應用于緊組合定位算法時,3D位置和速度RMSE分別降低至3.98 m和0.04 m/s。與不滿足解算條件時誤差持續發散的松組合相比,緊組合模式可以在更苛刻的高軌環境下保持較為恒定的誤差水平。
5 結束語
本文考慮部分高軌任務中應用GNSS進行定位時的非連續性與慣導組件誤差長期累積的場景,對基于偽距、偽距率觀測值的高軌緊組合定位算法進行研究,得到了多星座 GNSS 背景下典型高軌航天器應用緊組合定位時的誤差結果。驗證了PGA選星算法在緊組合定位中依然能有效降低位置誤差、速度誤差。結果表明,當典型高軌航天器在使用多星座GNSS和SINS進行緊組合定位時,可以實現米級定位精度,且與松組合定位模式相比,緊組合定位模式導航性能更為高效穩定。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19