404 Not Found
404 Not Found
基于改進YOLOv5的蝴蝶蘭花朵識別與計數
肖克輝 楊宏 蘇章順 楊小丹
摘要:為精確預測蝴蝶蘭產量和對蝴蝶蘭的生產進行科學管理,對大苗時期的蝴蝶蘭植株花朵和花苞進行識別與檢測,統計其花量。由于蝴蝶蘭花苞目標體積較小,提出一種基于改進YOLOv5的蝴蝶蘭花朵與花苞識別方法。首先,修改頸部網絡的結構,在特征金字塔FPN(Feature Pyramid Network)和路徑聚合網絡PANet(Path Aggregation Network)中引入有利于小目標檢測的160×160尺度特征層,以提升對小目標的檢測效果;其次,使用K-means++聚類算法針對訓練集生成更合適的先驗框,并采用載入預訓練權重和凍結主干網絡的訓練方式,以使模型更加容易學習,提高網絡模型收斂速度和泛化能力;最后,在頸部網絡加入輕量級注意力機制,加強對目標的關注,減少背景干擾,以提升模型的特征提取能力。試驗結果顯示,該算法對花苞的檢測精確率達到89.54%,比改進前提升9.83%;對花苞和花朵的平均精確率達到91.81%,比改進前提升5.56%。該算法有優異的檢測精度并有效提高對小目標的檢測能力。
關鍵詞:蝴蝶蘭花朵;深度學習;目標檢測;YOLOv5;聚類算法;注意力機制
中圖分類號: TP391.41: S6文獻標識碼:A文章編號:20955553 (2023) 11015508
Identification and counting of phalaenopsis flowers based on improved YOLOv5
Xiao Kehui Yang Hong Su Zhangshun Yang Xiaodan
(1. College of Mathematics and Informatics, South China Agricultural University, Guangzhou, 510640, China;
2. Key Laboratory of Smart Agricultural Technology in Tropical South China, Ministry of Agriculture and
Rural Affairs, Guangzhou, 510640, China)
Abstract:In order to accurately predict the yield of phalaenopsis and scientifically manage the production of phalaenopsis, this study identified and detected the flowers and buds of phalaenopsis plants in the big seedling stage and counted the number of flowers and buds. Due to the small target volume of phalaenopsis bud,, a phalaenopsis flower and bud recognition method based on improved YOLOv5 was proposed. Firstly, the structure of the neck network was modified in feature pyramid network and Path Aggregation Network. A 160×160 feature map was introduced to improve the detection effect of small targets. Secondly, the K-means++ clustering algorithm was used to generate a more appropriate anchor box for the training set, and the training method of loading pretraining weights and freezing the backbone network was adopted to make the model easier to learn and improve the convergence speed and generalization ability of the network model. Finally, a lightweight attention mechanism was added to the neck network to strengthen the attention to the target and reduce the background interference, to improve the feature extraction ability of the model. The experimental results showed that the AP of the algorithm for buds was 89.54%, which was 9.83% higher than that before the improvement, and the mAP of buds and flowers was 91.81%, which was 5.56% higher than that before the improvement. So, the algorithm has excellent detection accuracy and effectively improves the detection ability of small targets.
Keywords:phalaenopsis flower; deep learning; target detection; YOLOv5; clustering algorithm; attention mechanism
0引言
蝴蝶蘭是我國花卉市場中占據份額較大的蘭花品種之一[1]。對大苗時期已開放的花朵與未開放的花苞數量進行精確統計有助于預測蝴蝶蘭產量,并且對實際生產的規劃管理有重要意義。同時,對單株蝴蝶蘭的花量統計有助于蝴蝶蘭按等級分類,使用自動化的檢測和識別手段,可以減少人工投入,提高生產效率。
基于卷積神經網絡[2](Convolutional Neural Networks, CNN)的目標檢測算法替代傳統目標檢測算法被廣泛應用于計算機視覺中。相比傳統目標檢測算法需要依賴人為設計特征,卷積神經網絡在提取特征時不用關心具體的特征,并且應用局部相關性和權值共享的思想,降低網絡的參數量,使它在精度和效率上都有大幅提升。目前,CNN算法主要分為兩類:一是兩階段目標檢測算法,如RCNN[34](Regions with CNN features)系列、SPPNet[5](Spatial Pyramid Pooling-Net)等,其核心是先獲得建議區域,然后在當前區域內進行精確的分類與位置預測。二是一階段目標檢測算法,如SSD[67](Single Shot MultiBox Detector)系列、YOLO[89](You Only Look Once)系列等,其核心是通過單個卷積神經網絡處理圖像,直接計算出目標的分類結果和位置坐標。
YOLO系列的算法具有高準確率和高檢測速度的優點,特征提取也更著眼于整體,所以越來越多的YOLO系列的方法被應用在農業領域。Wu等[10]使用一種基于通道修剪的YOLOv4算法來檢測自然環境下的蘋果花,發現該算法對變化的果樹品種和光照方向具有較好的魯棒性。胡根生等[11]提出一種基于YOLOv5改進模型的茶尺蠖檢測方法,該方法引入卷積核組來提高網絡的特征提取能力,并更換邊界框回歸損失函數來減少前景和背景的類不平衡對檢測結果的影響,發現該方法可以實現對茶尺蠖的準確檢測。
由于上述基于YOLO系列的改進算法檢測單一類型目標時,準確率較高,但針對多種類型目標時,平均準確率較低。且大苗時期的蝴蝶蘭圖像中,蝴蝶蘭花苞具有尺寸小、分辨率低、遮擋較多等特點,容易造成漏檢和誤檢。所以本文關注的主要問題是如何提高對蝴蝶蘭花苞這種小目標檢測的精確率,同時不會降低對蝴蝶蘭花朵的檢測效果。
本文在原YOLOv5x模型的基礎上進行改進,對大苗時期的蝴蝶蘭圖像進行花朵識別和檢測,解決小尺度花苞目標識別難的問題,通過獲取照片中蝴蝶蘭花朵和蝴蝶蘭花苞2個類型的目標總數,提升單株或多株蝴蝶蘭植株圖像花量統計的精確程度,為蝴蝶蘭植株大苗時期的花量科學管控以及花量預測提供參考。
1試驗數據
1.1圖像獲取
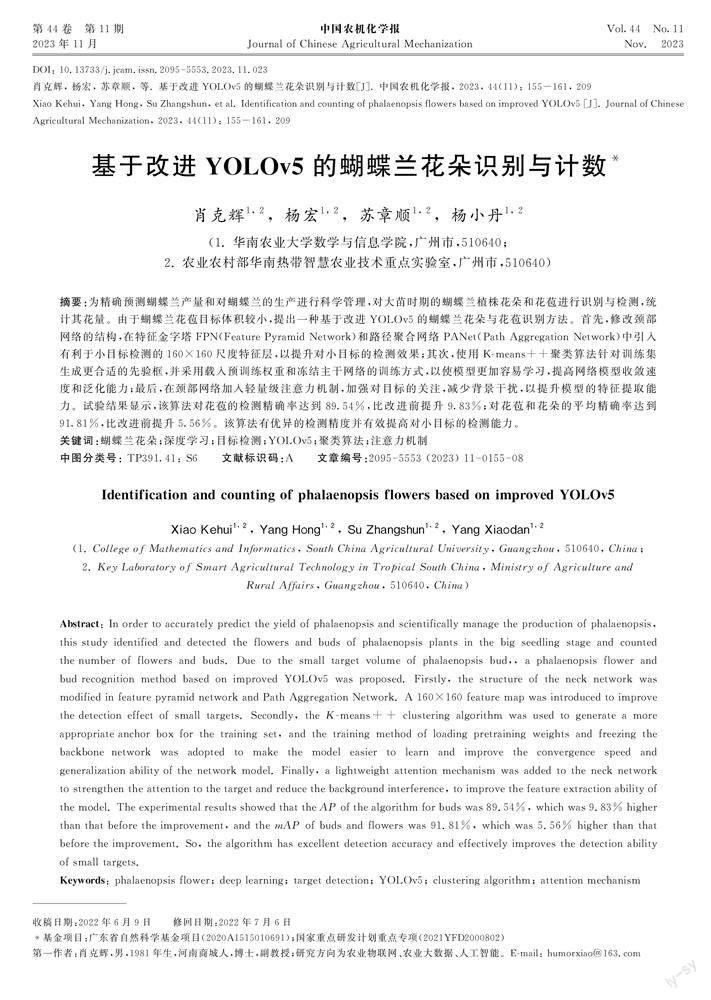
本文試驗數據采集自廣東省廣州市白云區鐘落潭鎮的廣東省農業科學院白云實驗基地。本文的試驗數據由人工手持Nikon 1 J4數碼相機拍攝獲得,拍攝內容主要為單株和多株的大苗時期的蝴蝶蘭植株,共計1 928張,均使用jpg格式保存。圖1為收集的兩幅圖像。
1.2數據預處理
本文采用PASCAL VOC的數據集格式,使用LabelImg軟件手工標注圖像中蝴蝶蘭的花朵和花苞,生成xml格式的標注文件。標注完成后,隨機選擇數據集中1552張作為訓練集,183張作為驗證集,193張作為測試集。
為了提高模型的泛化能力和魯棒性,需要對數據集進行數據增強,增加數據集的樣本數量與噪聲數據。本文使用Mosaic數據增強方法[12],具體操作為每次隨機讀取4張圖像,對這4張圖像分別進行隨機縮放、翻轉、色域變換等數據增強方法,然后將4張圖像從左上角逆時針拼接到一起并與調整后的標簽一同傳入網絡中進行訓練,如圖2所示。Mosaic數據增強方法的優點在于檢測目標的背景更豐富,且經過標準化BN(Batch Normalization)層時會同時處理4張圖片,使得BN層求出的均值與方差更接近于整體數據集的均值與方差,增強了模型的魯棒性。
2基于YOLOv5蝴蝶蘭檢測模型改進
YOLOv5架構根據復雜程度的遞增分為4種模型,分別為s、m、l、x,本文選擇復雜程度最高但同時精度最高的YOLOv5x進行改進。由于大苗時期大部分蝴蝶蘭花苞目標面積占整副圖像比例較小,極易造成漏檢和誤檢。
針對這個問題,本文提出了一種改進的YOLOv5x模型,以增強對小目標的檢測能力。首先,增加更大尺度的檢測層,以提升對小目標的檢測效果;其次,使用K-means++算法針對訓練集聚類出更合適的先驗框,以使模型更加容易學習;最后,在頸部網絡加入CBAM注意力模塊,以增加模型的特征提取能力。
2.1大尺度檢測層
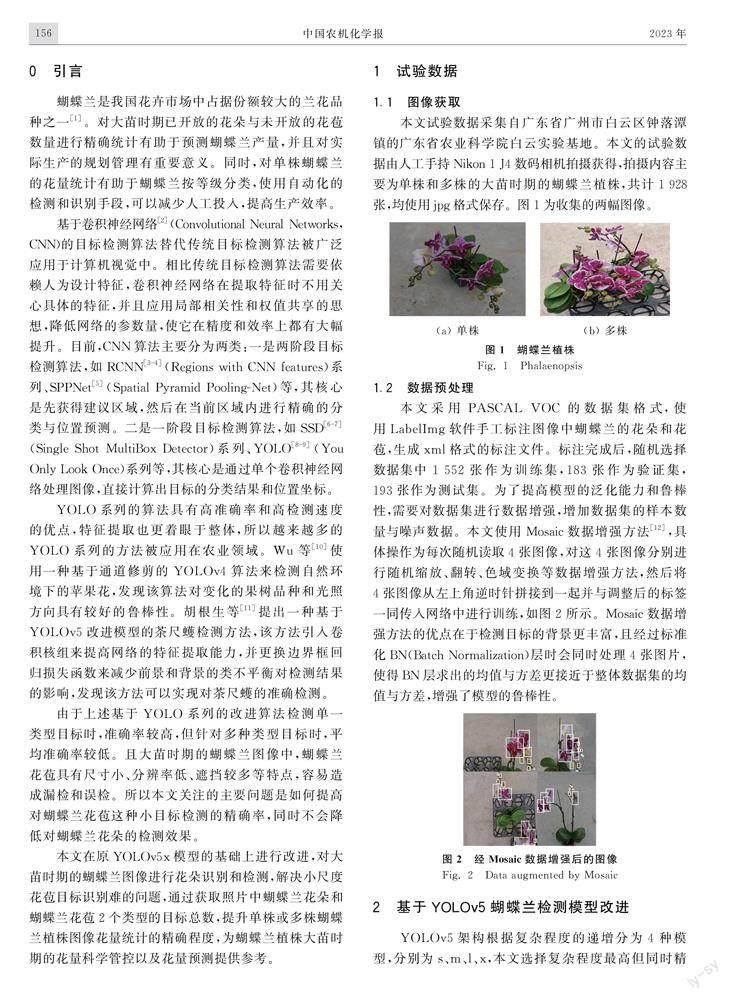
YOLOv5x模型可以分成3部分,分別是主干網絡、頸部網絡和YOLO Head。YOLOv5x的主干網絡采用的是CSPDarkNet,作用為提取輸入圖片的特征,并通過8倍下采樣、16倍下采樣、32倍下采樣獲得3個不同尺度的特征層,將其傳入頸部網絡。頸部網絡使用特征金字塔FPN[13]將主干網絡傳來的3個不同尺度的特征進行上采樣實現特征融合,并且使用PANet結構,對特征進行下采樣以再次實現特征融合。
頸部網絡結構如圖3所示。YOLO Head的作用為預測目標的類別與位置,通過一次卷積操作完成。
FPN是通過融合經淺層卷積后得到具有準確目標位置信息的特征和經多次卷積后得到具有豐富語義信息的特征來解決目標檢測中的多尺度問題。所以針對蝴蝶蘭花苞目標小的問題,將主干網絡中4倍下采樣得到的特征層與原有特征層一并傳入FPN。4倍下采樣得到的特征層擁有更豐富的位置信息。FPN和PANet將在4個不同尺度的特征上進行特征融合,可以提升對小目標的檢測效果,結構如圖4所示。
2.2K-means++聚類算法
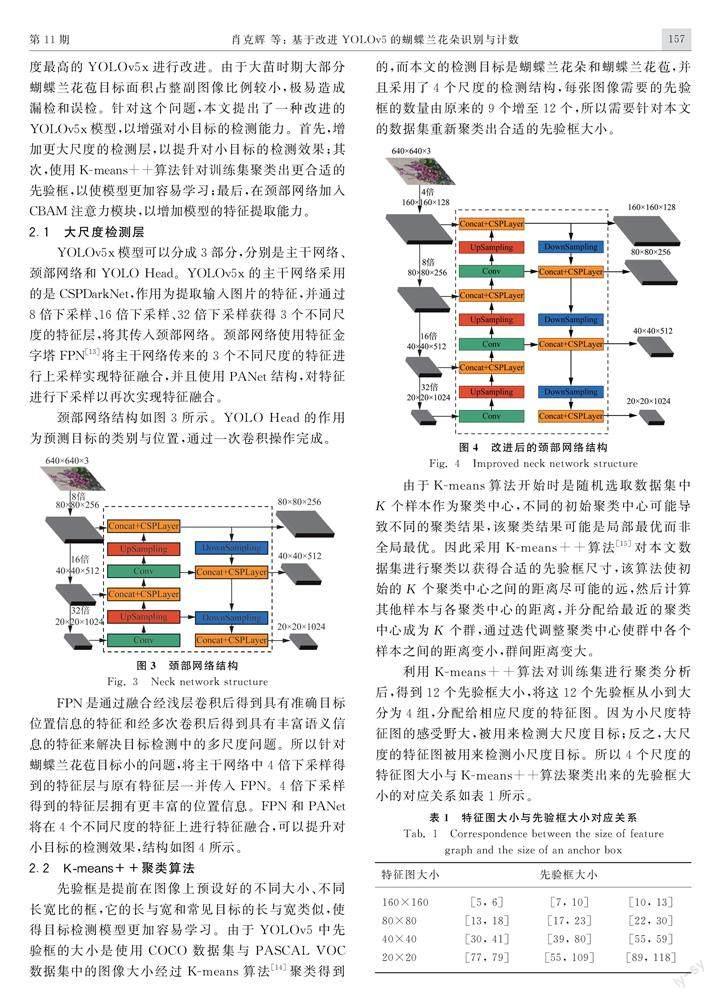
先驗框是提前在圖像上預設好的不同大小、不同長寬比的框,它的長與寬和常見目標的長與寬類似,使得目標檢測模型更加容易學習。由于YOLOv5中先驗框的大小是使用COCO數據集與PASCAL VOC數據集中的圖像大小經過K-means算法[14]聚類得到的,而本文的檢測目標是蝴蝶蘭花朵和蝴蝶蘭花苞,并且采用了4個尺度的檢測結構,每張圖像需要的先驗框的數量由原來的9個增至12個,所以需要針對本文的數據集重新聚類出合適的先驗框大小。
由于K-means算法開始時是隨機選取數據集中K個樣本作為聚類中心,不同的初始聚類中心可能導致不同的聚類結果,該聚類結果可能是局部最優而非全局最優。
因此采用K-means++算法[15]對本文數據集進行聚類以獲得合適的先驗框尺寸,該算法使初始的K個聚類中心之間的距離盡可能的遠,然后計算其他樣本與各聚類中心的距離,并分配給最近的聚類中心成為K個群,通過迭代調整聚類中心使群中各個樣本之間的距離變小,群間距離變大。
利用K-means++算法對訓練集進行聚類分析后,得到12個先驗框大小,將這12個先驗框從小到大分為4組,分配給相應尺度的特征圖。因為小尺度特征圖的感受野大,被用來檢測大尺度目標;反之,大尺度的特征圖被用來檢測小尺度目標。所以4個尺度的特征圖大小與K-means++算法聚類出來的先驗框大小的對應關系如表1所示。
2.3CBAM
卷積注意力機制模塊CBAM[16](Convolutional Block Attension Module)是一種結合了空間維度和通道維度的注意力機制模塊。注意力機制模仿人類視覺系統看到圖像時注意力有選擇性地聚集于圖像的顯著部分的特點。通過注意力機制,圖像的重要特征得到關注,不必要的特征被抑制。CBAM關注通道和空間這兩個維度上的有意義特征,可以被集成到大部分網絡模型中,在不顯著增加計算量和參數量的前提下提升網絡模型的特征提取能力。為進一步融合主干網絡提取到的4個尺度特征圖,分離出顯著的特征,在頸部網絡引入CBAM。
CBAM將通道注意力模塊與空間注意力模塊串聯在一起,學習輸入特征中不同通道和不同位置的重要性權值,然后將學習到的重要性權值與輸入特征相乘,輸出新的特征。通道注意力模塊保持通道維度不變,壓縮空間維度,因此該模塊對蝴蝶蘭花朵和花苞目標類別信息敏感;空間注意力模塊保持空間維度不變,壓縮通道維度,因此該模塊對蝴蝶蘭花朵和花苞目標位置信息敏感。CBAM結構如圖5所示。
改進后的YOLOv5x模型結構如圖6所示,基于改進YOLOv5的蝴蝶蘭花朵識別與計數過程如下:(1)將任意輸入的蝴蝶蘭植株圖像,經過Mosaic數據增強等預處理操作,將其轉換為640像素×640像素×3通道的圖像輸入到改進的YOLOv5模型中。(2)在主干網絡部分進行特征提取,將獲取到的4個特征層輸入到頸部網絡。(3)在改進后的頸部網絡進行特征融合,進一步提取特征。(4)將4個經過加強提取的特征層輸入到YOLO Head,獲得預測結果。
3模型訓練
3.1試驗環境
本文的實驗環境配置如下:CPU為Intel Xeon(R) CPU E5-2620 v4;運行內存為64 GB;GPU為2塊12 GB的Tesla K40c;操作系統為Ubuntu 16.04;NVIDIA驅動為418.87.00;編程語言Python與深度學習框架Pytorch的版本分別為3.7和1.2.0。
3.2訓練過程
本試驗輸入圖像大小為640像素×640像素,總訓練代數設為150世代,批處理大小設為16,優化器選擇SGD。初始學習率設為0.01,動量因子設為0.937,為防止過擬合,權值衰減設為0.000 5,門限值設為0.5,每個世代保存一次權值,采用余弦退火學習算法對學習率進行更新。
為縮短訓練時間加快迭代收斂,并提升模型魯棒性,本試驗采取遷移學習[17]的方法進行訓練。使用經過大型數據集訓練的預訓練權重,凍結主干網絡訓練前50世代,以調整非主干網絡的權重。后100世代解凍主干網絡,對整體網絡進行訓練。改進后的YOLOv5x模型訓練損失如圖7所示,其中藍色折線代表訓練集損失,黃色折線代表驗證集損失。從圖7中可以看出,訓練集損失和驗證集損失能較快地下降并在110世代開始收斂,顯示出模型的有效性和可學習性。
3.3評價指標
4試驗結果與分析
由于蝴蝶蘭花朵目標體積較大,以下參與試驗的各網絡模型對其均有良好的檢測效果,因此各試驗將主要關注各網絡模型對體積較小的蝴蝶蘭花苞的檢測效果,并分析造成該結果的原因。
4.1采用不同注意力機制的模型檢測效果
為探究不同注意力機制對蝴蝶蘭花苞的檢測效果的影響,在已增加更大尺度檢測層和經過K-means++算法重新聚類出合適尺寸先驗框的YOLOv5x模型的頸部網絡中分別加入SE[18](Squeeze and Excitation)模塊、CA[19](Coordinate Attention)模塊、CBAM模塊,進行對比試驗,試驗結果如表2所示,其中None表示不加入任何注意力機制。P1、R1、F1_1、AP1為各網絡模型檢測蝴蝶蘭花苞的準確率、召回率、F1得分、AP值,AP2為各網絡模型檢測蝴蝶蘭花朵的AP值。檢測效果如圖8所示,其中紅色框為檢測到的蝴蝶蘭花朵區域,藍色框為檢測到的蝴蝶蘭花苞區域,方框上的數字表示被檢測成相應目標的概率。
由表2可知,在已增加更大尺度檢測層和經過K-means++算法重新聚類出合適尺寸先驗框的YOLOv5x模型的頸部網絡中加入CBAM模塊相比加入SE模塊、CA模塊準確率分別高出1.27%、2.52%,召回率分別高出2.21%、8.45%。結合圖8可知:加入SE模塊相比加入CBAM模塊,漏檢的蝴蝶蘭花苞較多,表明它只考慮重新衡量各通道的重要性而忽略了位置信息。加入CA模塊相比加入CBAM模塊,漏檢的花苞較多,表明它雖然關注位置信息但在本文數據集上的效果并沒有CBAM模塊好。綜上可知,將CBAM模塊融合入頸部網絡的改進方案表現出了更好的適應性和有效性。
4.2采用不同模型的檢測效果
在相同的試驗條件下采用不同網絡模型進行對比試驗,并計算各網絡模型對蝴蝶蘭花苞的準確率、召回率、F1得分、AP值,和對蝴蝶蘭花朵的AP值,以及各模型的參數量,試驗結果如表3所示。
由表3可知,改進后的YOLOv5x模型檢測蝴蝶蘭花苞的準確率比Faster RCNN、SSD、CenterNet[20]、YOLOv3、原YOLOv5x分別高出67.96%、55.29%、6.32%、22.75%、3.95%,在召回率上分別高出52.28%、57.58%、42.44%、23.70%、12.18%。參數量相比Faster RCNN少180.44MB,相比SSD、CenterNet、Yolov3、原YOLOv5x分別多242.71MB、217.86MB、106.15MB、162.96MB。并使用FPS(Frame Per Second)衡量檢測速度,它表示算法在每秒鐘內檢測圖片的數量。由表3可知,改進后的YOLOv5x模型的FPS比Faster RCNN高1.4,相比SSD、CenterNet、Yolov3、原YOLOv5x分別低5.24、4.02、2.44、1.68。檢測效果如圖9所示。
結合圖9可知,使用Faster RCNN模型時,檢測到的花苞數量很少,表明Faster RCNN只是將主干網絡提取的最后一層特征信息作為區域生成網絡和特征預測頭的輸入,不利于檢測小目標。使用SSD模型時,檢測到的花苞數量較少,且錨框尺寸偏大,表明SSD模型使用的錨框尺寸不合適。使用CenterNet模型時,檢測到的花苞數量很少,且置信度較低,表明CenterNet模型只提取特征提取網絡的最后一層特征信息,丟失了大量的花苞信息,不利于花苞的檢測。使用YOLOv3模型時,檢測到的花苞數量較少,且部分花苞邊緣定位不準確,表明YOLOv3模型使用的錨框尺寸與圖像中花苞的尺寸不匹配。使用原YOLOv5x模型時,其很少檢測到靠近花梗頂部的體積較小的花苞,表明它對小目標的特征信息提取能力較弱。使用改進的YOLOv5x模型時,克服了原YOLOv5x模型的缺點,能檢測到大部分體積較小的花苞,但是模型的參數量比原YOLOv5x多了近一倍,檢測速度下降了37.58%。改進的YOLOv5x模型相比于其他各目標檢測模型對小目標有最好的檢測效果,表現出了極強的優越性,但代價是模型的參數量增多,檢測速度降低。
4.3消融試驗
本文對YOLOv5x的改進包括增加更大尺度檢測層、使用K-means++算法重新聚類先驗框尺寸和在頸部網絡中加入CBAM模塊。為研究各項改進及各項改進之間的組合對算法性能優化的程度,設計了消融實驗,消融試驗數據如表4所示,其中“√”表示向YOLOv5x模型中加入該項改進。
由表4可知,各項改進方法單獨加入或組合加入YOLOv5x模型中均能有效提升模型對體積較小的蝴蝶蘭花苞的檢測效果。其中加入更大尺度檢測層提升效果最明顯,相比未加入時對花苞的AP值提升了8.63%,mAP提升了5.06%,但是參數量也增加了160.40MB。在YOLOv5x模型的頸部網絡中加入CBAM模塊并配合K-means++算法重新聚類先驗框尺寸,相比未加入這兩項改進,可以在參數量時僅增加1.56MB的情況下,對花苞的AP值提升5.98%,mAP提升3.88%。表明了本文各項模型改進方案的有效性和可行性。
4.4花量計數結果
采用訓練后改進的YOLOv5x模型對測試集193幅圖像進行測試,通過多個評價指標對模型的性能進行評價。測試集193幅圖像共有蝴蝶蘭花苞2084個,蝴蝶蘭花朵817朵。對花量計數結果如表5所示,由表中數據可知,改進的YOLOv5x模型對于體積較小的蝴蝶蘭花苞和體積較大的蝴蝶蘭花朵均有良好的計數效果。
5結論
本文提出一種改進的YOLOv5x模型對大苗時期的蝴蝶蘭的花朵和花苞進行檢測,有效地提高對花苞小目標的檢測效果,使對蝴蝶蘭花量的統計更加精確。
1)? 針對本文的蝴蝶蘭數據集,利用K-means++算法重新聚類出新的先驗框尺寸,相對于沒有使用聚類時對花苞的檢測精確率提升了3.24%。
2)? 使用更大尺度檢測層,相對于原YOLOv5x模型對花苞的檢測精確率提升了8.63%,提升了對小目標的特征提取能力。
3)? 在頸部網絡中加入CBAM模塊,相對于原YOLOv5x模型對花苞的檢測精確率提升了3.23%,可以有效提高對目標特征的利用率。
4) ?改進的YOLOv5x模型對花苞的檢測精確率達到89.54%,比改進前提升了9.83%,平均精確率達到91.81%,比改進前提升了5.56%,高于其他5種經典的目標檢測模型,且對蝴蝶蘭花朵的檢測精確率相比改進前提高了1.28%。
5) 為了探究在頸部網絡加入CBAM注意力模塊對最后檢測效果的影響,本文設計了注意力模塊對比試驗,試驗結果表明:CBAM模塊相比于SE模塊、CA模塊在本文數據集上取得了最好的檢測效果。并且為了探究各項改進對提升檢測效果的貢獻程度,本文設計了消融試驗,試驗結果表明:增加更大尺度的檢測層能有效提升對小目標的檢測效果,但是參數量增加近一倍。
由于本文提出的模型對蝴蝶蘭花苞仍存在漏檢和誤檢,且模型參數量較大,后續可以進一步改進網絡,以減少模型參數,提升運算速度并爭取更好的檢測效果。
參考文獻
[1]王瑞華, 王俊. 中國蝴蝶蘭產業現狀及發展建議[J]. 湖北農業科學, 2018, 57(3): 45-47, 50.
[2]Lu Jinzhu, Tan Lijuan, Jiang Huanyu. Review on convolutional neural network (CNN) applied to plant leaf disease classification [J]. Agriculture, 2021, 11(8): 707.
[3]Girshick R. Fast R-CNN [C]. Proceedings of the IEEE International Conference on Computer Vision, 2015: 1440-1448.
[4]Jiang H, Learned-Miller E. Face detection with the faster R-CNN [C]. 2017 12th IEEE International Conference on Automatic Face & Gesture Recognition (FG 2017). IEEE, 2017: 650-657.
[5]He Kaiming, Zhang Xiangyu, Ren Shaoqing, et al. Spatial pyramid pooling in deep convolutional networks for visual recognition [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9): 1904-1916.
[6]Zheng W, Tang W, Jiang L, et al. SE-SSD: Self-assembling single-stage object detector from point cloud [C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 14494-14503.
[6]Belfodil A, Belfodil A, Bendimerad A, et al. FSSD-a fast and efficient algorithm for subgroup set discovery [C]. 2019 IEEE International Conference on Data Science and Advanced Analytics (DSAA). IEEE, 2019: 91-99.
[7]付中正, 何瀟, 方逵, 等. 基于改進SSD網絡的西蘭花葉片檢測研究[J]. 中國農機化學報, 2020, 41(4): 92-97.Fu Zhongzheng, He Xiao, Fang Kui, et al. Study on the detection of broccoli leaves based on the improved SSD network [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(4): 92-97.
[9]Shen Z, Liu Z, Li J, et al. DSOD: Learning deeply supervised object detectors from scratch [C]. Proceedings of the IEEE International Conference on Computer Vision, 2017: 1919-1927.
[10]Malty M, Banerjee S, Chaudhuri S. Faster R-CNN and YOLO based vehicle detection: A survey [C]. 2021 5th International Conference on Computing Methodologies and Communication (ICCMC). IEEE, 2021: 1442-1447.
[8]Cheng L, Li J, Duan P, et al. A small attentional YOLO model for landslide detection from satellite remote sensing images [J]. Landslides, 2021, 18(8): 2751-2765.
[9]Jimin Y, Wei Z. Face mask wearing detection algorithm based on improved YOLO-v4 [J]. Sensors, 2021, 21(9): 3263.
[10]Wu D, Lü S, Jiang M, et al. Using channel pruning-based YOLO v4 deep learning algorithm for the real-time and accurate detection of apple flowers in natural environments [J]. Computers and Electronics in Agriculture, 2020, 178: 105742.
[11]胡根生, 吳繼甜, 鮑文霞, 等. 基于改進YOLOv5網絡的復雜背景圖像中茶尺蠖檢測[J]. 農業工程學報, 2021, 37(21): 191-198.Hu Gensheng, Wu Jitian, Bao Wenxia, et al. Detection of Ectropis oblique in complex background images using improved YOLOv5 [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(21):191-198.
[12]Dadboud F, Patel V, Mehta V, et al. Single-stage UAV detection and classification with YOLOV5: mosaic data augmentation and PANET [C]. 2021 17th IEEE International Conference on Advanced Video and Signal-based Surveillance (AVSS). IEEE, 2021: 1-8.
[13]Wang Y, Zell A. YOLO+FPN: 2D and 3D fused object detection with an RGB-D camera [C]. 2020 25th International Conference on Pattern Recognition (ICPR). IEEE, 2021: 4657-4664.
[14]Krishna K, Murty M N. Genetic K-means algorithm [J]. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 1999, 29(3): 433-439.
[15]Kapoor A, Singhal A. A comparative study of K-means, K-means++ and fuzzy C-Means clustering algorithms [C]. 2017 3rd International Conference on Computational Intelligence & Communication Technology (CICT). IEEE, 2017: 1-6.
[16]Woo S, Park J, Lee J Y, et al. CBAM: Convolutional block attention module [C]. Proceedings of the European Conference on Computer Vision (ECCV), 2018: 3-19.
[17]Zhuang F, Qi Z, Duan K, et al. A comprehensive survey on transfer learning [J]. Proceedings of the IEEE, 2020, 109(1): 43-76.
[18]Howard A, Sandler M, Chu G, et al. Searching for MobileNetV3 [C]. Proceedings of the IEEE/CVF International Conference on Computer Vision, 2019: 1314-1324.
[19]Hou Q, Zhou D, Feng J. Coordinate attention for efficient mobile network design [C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 13713-13722.
[20]Duan K, Bai S, Xie L, et al. CenterNet: Keypoint triplets for object detection [C]. Proceedings of the IEEE/CVF International Conference on Computer Vision, 2019: 6569-6578.