基于系留放飛雙模無人機(jī)的雷達(dá)標(biāo)校方法研究
2023-12-11 12:10:38邾立志
艦船電子工程 2023年9期
關(guān)鍵詞:信號(hào)
苗 菁 李 歸 姚 元 邾立志
(1.南京電子技術(shù)研究所 南京 210039)(2.南京理工大學(xué)計(jì)算機(jī)科學(xué)與工程學(xué)院 南京 210094)
1 引言
雷達(dá)對(duì)目標(biāo)的測(cè)量精度是關(guān)系到其作戰(zhàn)使用效能的核心指標(biāo)。為了保證測(cè)量精度,須對(duì)測(cè)量誤差進(jìn)行修正。雷達(dá)測(cè)量誤差包括隨機(jī)誤差和系統(tǒng)誤差,其中隨機(jī)誤差與信噪比、多徑、雜波等因素相關(guān),一般不可消除;系統(tǒng)誤差與安裝誤差、平臺(tái)形變、機(jī)電軸誤差及導(dǎo)航誤差等相關(guān),可通過標(biāo)校將測(cè)量值與真值比對(duì)來進(jìn)行修正[1~2]。
傳統(tǒng)雷達(dá)標(biāo)校方法主要有高塔標(biāo)校[3]、衛(wèi)星標(biāo)校[4]和民航標(biāo)校[5~6]等,在效率、適應(yīng)性、機(jī)動(dòng)性、通用性等方面存在不足。高塔標(biāo)校需建設(shè)標(biāo)校塔或?qū)S靡苿?dòng)標(biāo)校車,成本高,組織標(biāo)校活動(dòng)不便;衛(wèi)星標(biāo)校受艦艇搖擺與衛(wèi)星重返時(shí)間制約;基于民航廣播式自動(dòng)相關(guān)監(jiān)視(ADS-B)系統(tǒng)的標(biāo)校方法真值與雷達(dá)測(cè)量值時(shí)間對(duì)準(zhǔn)困難,標(biāo)定精度差。近年來,在全球衛(wèi)星導(dǎo)航系統(tǒng)(GNSS)支持下進(jìn)行標(biāo)校的方法逐漸成熟[7],其與無人機(jī)平臺(tái)結(jié)合,具有經(jīng)濟(jì)、快捷、可動(dòng)態(tài)部署的特點(diǎn),可有效解決上述問題,是雷達(dá)標(biāo)校系統(tǒng)的重要發(fā)展方向。
GNSS 測(cè)量精度是準(zhǔn)確標(biāo)校雷達(dá)的基礎(chǔ)[8],采用差分GPS(DGPS)技術(shù)[9]和RTK 技術(shù)[10]可將三維定位精度提高到厘米級(jí)。將高精度GNSS接收機(jī)放在無人機(jī)上,雷達(dá)跟蹤該目標(biāo),獲得固定翼無人機(jī)[11~12]或懸停無人機(jī)[13~14]定位數(shù)據(jù)和雷達(dá)測(cè)量數(shù)據(jù)后,進(jìn)行坐標(biāo)轉(zhuǎn)換和數(shù)據(jù)處理,即可標(biāo)定雷達(dá)系統(tǒng)誤差。利用無人機(jī)對(duì)艦載雷達(dá)進(jìn)行標(biāo)校,還應(yīng)從局部基準(zhǔn)獲取艦姿態(tài)修正值以克服艦船搖擺所帶來的不利影響[15~16]。
本文提出了采用系留放飛雙模多旋翼無人機(jī)平臺(tái)結(jié)合空饋任務(wù)載荷、信號(hào)源、信標(biāo)機(jī)和DGPS設(shè)備等構(gòu)建標(biāo)校系統(tǒng)的方法,對(duì)某艦載雷達(dá)進(jìn)行波瓣圖繪制和模擬運(yùn)動(dòng)目標(biāo)標(biāo)校場(chǎng)景下的射頻鏈路進(jìn)行分析計(jì)算,給出試驗(yàn)方案,并開展了相關(guān)驗(yàn)證工作。
2 系留放飛雙模無人機(jī)標(biāo)校系統(tǒng)的組成與原理
針對(duì)無人機(jī)標(biāo)校在精度、穩(wěn)定度、連續(xù)工作時(shí)間、特殊使用環(huán)境、載荷、可靠性等方面的較高要求,選用一種新型系留放飛雙模無人機(jī)平臺(tái)構(gòu)建標(biāo)校系統(tǒng)。該系統(tǒng)由雙模無人機(jī)系統(tǒng)、空饋任務(wù)載荷、差分GPS 設(shè)備、信號(hào)源/信標(biāo)機(jī)、無線數(shù)傳設(shè)備等組成。
雙模即“系留模式”加“放飛模式”,即同一無人機(jī)通過電源切換,實(shí)現(xiàn)系留和自由飛行兩種工作狀態(tài)。雙模無人機(jī)系統(tǒng)由多旋翼無人飛行器、系留線纜及收放裝置、供電系統(tǒng)、地面控制站等構(gòu)成,其系留升限為300m,可長(zhǎng)時(shí)間空中懸停,克服了常規(guī)無人機(jī)連續(xù)工作時(shí)間短(約30min)的問題。雙模無人機(jī)可搭載各種任務(wù)設(shè)備,在不同場(chǎng)景下靈活選擇多種作業(yè)模式,全天候、全天時(shí)地完成多種任務(wù)。雙模無人機(jī)在斷開復(fù)合光纜的情況下,可像常規(guī)無人機(jī)一樣自由飛行。
無人機(jī)采用GPS 載波相位實(shí)時(shí)差分傳輸技術(shù)和高穩(wěn)定飛控對(duì)無人機(jī)位置進(jìn)行實(shí)時(shí)修正。通過利用DGPS、飛控、慣導(dǎo)、加速度計(jì)、陀螺儀、磁傳感器、氣壓計(jì)等多種傳感器數(shù)據(jù),保證無人機(jī)位置姿態(tài)數(shù)據(jù)的平滑和穩(wěn)定,滿足雷達(dá)標(biāo)校條件。
空饋任務(wù)載荷采用寬頻帶設(shè)計(jì),主要用于L、S、C、X、Ku 波段的信號(hào)接收、放大及轉(zhuǎn)發(fā),其A 端、B端接高增益喇叭天線,原理框圖如圖2所示。
3 射頻鏈路計(jì)算
3.1 天線波瓣圖測(cè)試
利用雙模無人機(jī)標(biāo)校系統(tǒng)繪制天線波瓣圖須開啟上行鏈路:地面信號(hào)源/信標(biāo)機(jī)產(chǎn)生連續(xù)波信號(hào),經(jīng)空饋任務(wù)載荷收發(fā)組件的發(fā)射通道放大后通過天線輻射至空間,被雷達(dá)接收,見圖3。
圖3 中,信號(hào)源天線發(fā)射功率為P,增益為G;空饋任務(wù)載荷A 端天線用于接收,有效孔徑為AA,增益為GA,口面處能流密度為Sur,接收信號(hào)功率為Pur;空饋任務(wù)載荷B端發(fā)射天線增益為GB;信號(hào)源天線到空饋任務(wù)載荷A 端天線的距離為l;空饋組件增益為M;空饋任務(wù)載荷發(fā)射功率為Put;無人機(jī)平臺(tái)到雷達(dá)的距離為R,雷達(dá)接收增益為Gr,雷達(dá)前端收到信號(hào)能流密度為Sr,功率為Pr。這些物理量存在以下關(guān)系:
綜合式(1)~(6)得到
3.2 模擬目標(biāo)測(cè)試
利用雙模無人機(jī)標(biāo)校系統(tǒng)模擬運(yùn)動(dòng)目標(biāo)須開啟下行鏈路:空饋任務(wù)載荷接收到雷達(dá)信號(hào),轉(zhuǎn)發(fā)給信標(biāo)機(jī)(見圖4)。信標(biāo)機(jī)將信號(hào)延時(shí)、加多普勒頻移后再通過上行鏈路轉(zhuǎn)發(fā)給雷達(dá)。
圖4中雷達(dá)發(fā)射功率為Pt,發(fā)射增益為Gt;無人機(jī)平臺(tái)到雷達(dá)的距離為Rd;空饋任務(wù)載荷B 端天線用于接收,有效孔徑為AB,增益為GB,口面處能流密度為Sdr,接收信號(hào)功率為Pdr,信標(biāo)機(jī)天線有效孔徑為As,雷達(dá)信號(hào)在信標(biāo)機(jī)天線處的能流密度為Ss,輸入信號(hào)功率為Pd。這些物理量存在以下關(guān)系:
綜合式(8)~(13)可知
4 試驗(yàn)驗(yàn)證及分析
4.1 無人機(jī)懸停精度分析
波瓣圖繪制過程中,需要無人機(jī)具有校高的懸停精度。
無人機(jī)采用GPS載波相位實(shí)時(shí)差分傳輸技術(shù),無人機(jī)的位置信息實(shí)時(shí)發(fā)送到地面站并被記錄,通過對(duì)無人機(jī)的GPS數(shù)據(jù)與基站GPS數(shù)據(jù)進(jìn)行比對(duì),得到無人機(jī)相對(duì)基站位置的偏離值,求其均方根誤差(RMSE)以分析懸停穩(wěn)定情況。
在2級(jí)到5級(jí)風(fēng)速條件下試飛錄取數(shù)據(jù)對(duì)懸停精度進(jìn)行分析,結(jié)果表明雙模無人機(jī)懸停水平和高度均方根誤差不大于11cm,航向角、滾轉(zhuǎn)角和俯仰角均方根誤差不大于0.7°,此精度可滿足一般雷達(dá)的標(biāo)校需求。
試飛誤差數(shù)據(jù)見表1。

表1 系留無人機(jī)懸停精度分析
其中,第一架次飛行數(shù)據(jù)見圖5~圖12。

圖1 系留放飛雙模無人機(jī)組成示意圖
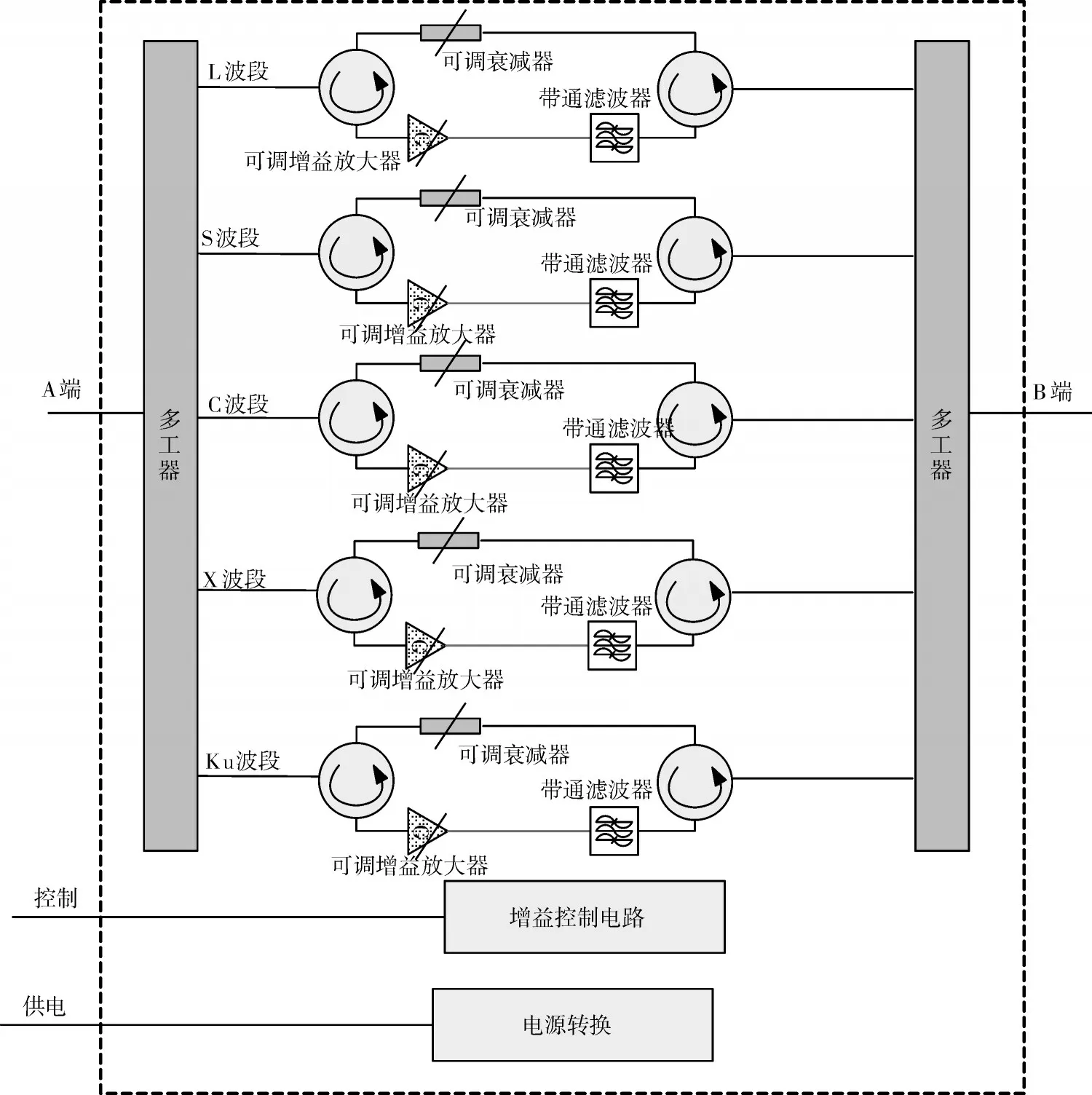
圖2 空饋任務(wù)載荷原理框圖
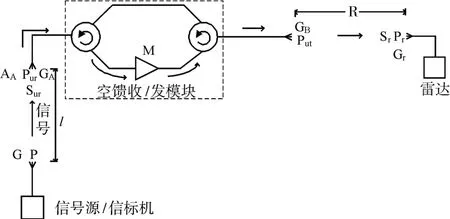
圖3 上行鏈路信號(hào)流程圖

圖4 下行鏈路信號(hào)流程圖
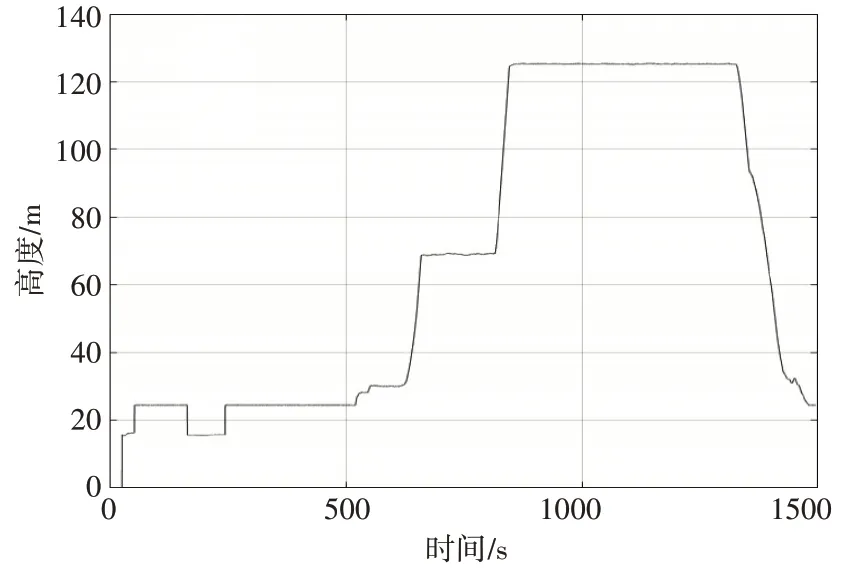
圖5 飛行高度隨時(shí)間變化圖

圖6 水平誤差分布圖(相對(duì)懸停中心)

圖7 懸停時(shí)X向(向東)偏差隨時(shí)間變化圖
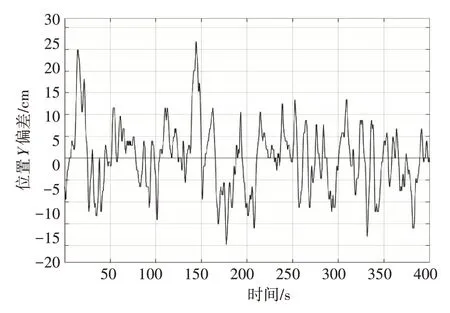
圖8 懸停時(shí)Y向(向北)偏差隨時(shí)間變化圖

圖9 懸停時(shí)Z向(向天頂)偏差隨時(shí)間變化圖

圖10 懸停時(shí)航向角偏差隨時(shí)間變化圖
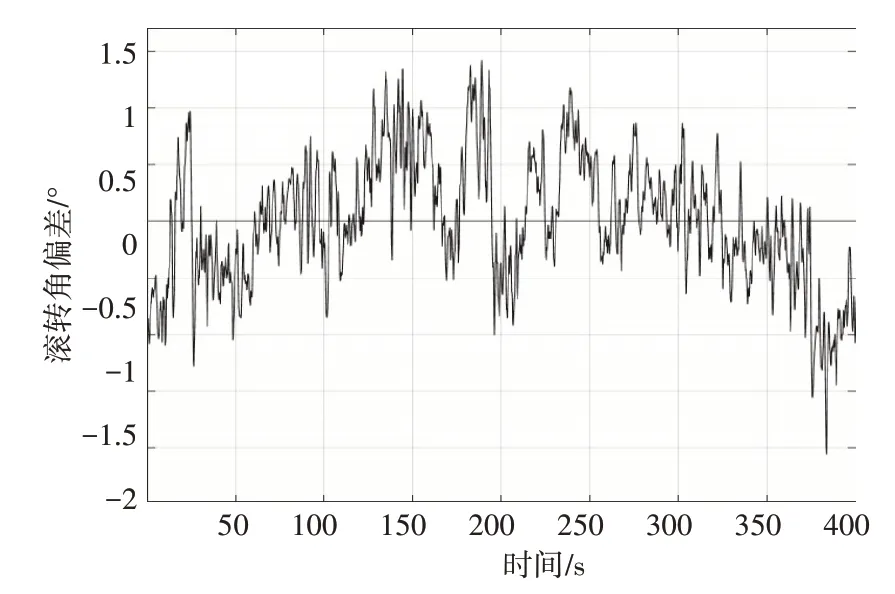
圖11 懸停時(shí)滾轉(zhuǎn)角偏差隨時(shí)間變化圖
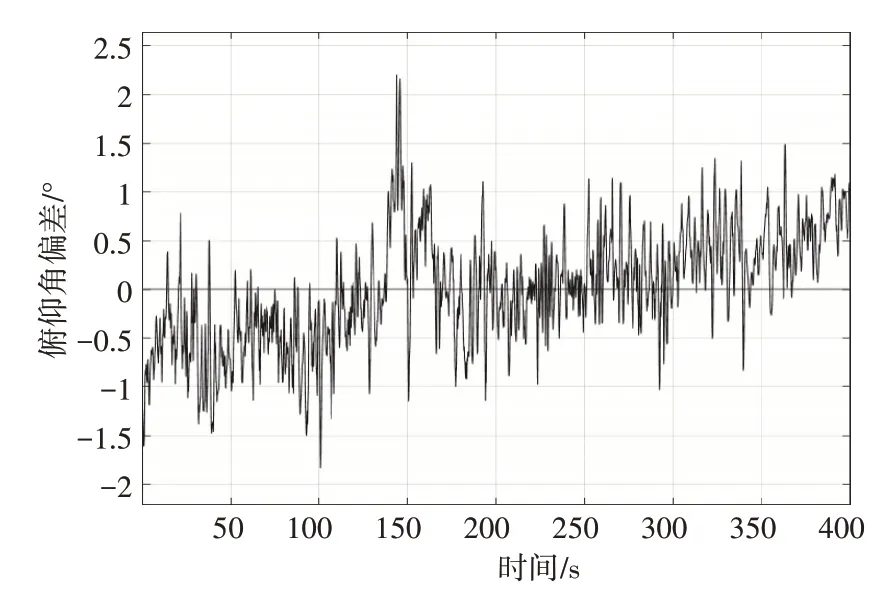
圖12 懸停時(shí)俯仰角偏差隨時(shí)間變化圖
4.2 波瓣圖繪制
被測(cè)雷達(dá)Gr=X1dB,工作波長(zhǎng)λ=0.03m。標(biāo)校系統(tǒng)信號(hào)源發(fā)射功率P=33dBm,G=13dB,空饋組件增益M=50dB,喇叭天線GA=GB=20dB,根據(jù)雷達(dá)周邊環(huán)境,確定距離關(guān)系l=300m,R=1700m,則雷達(dá)前端收到信號(hào)功率為(X1-83)dBm,滿足雷達(dá)繪制波瓣圖的靈敏度要求。該場(chǎng)景下繪制的雷達(dá)接收和波束與方位差波束的波瓣圖見圖13。

圖13 繪制的天線波瓣圖
4.3 模擬運(yùn)動(dòng)目標(biāo)標(biāo)校
被測(cè)雷達(dá)Pt=X2dBm,Gt=X3dB,工作波長(zhǎng)λ=0.03m。 標(biāo)校系統(tǒng)Gs=13dB,GA=GB=20dB,L=2dB,根據(jù)雷達(dá)周邊環(huán)境,確定距離關(guān)系l=200m,Rd=480m。該場(chǎng)景下Pd=(X2+X3-157)dBm,高于信標(biāo)機(jī)的靈敏度(-50dBm),滿足試驗(yàn)要求。對(duì)雷達(dá)進(jìn)行標(biāo)定,標(biāo)定結(jié)果詳見4.4節(jié)。
4.4 標(biāo)校精度對(duì)比
按照有關(guān)規(guī)定,標(biāo)校系統(tǒng)測(cè)量精度應(yīng)優(yōu)于被測(cè)雷達(dá)誤差指標(biāo)的1/3[17]。利用雙模無人機(jī)對(duì)雷達(dá)進(jìn)行標(biāo)定,作為對(duì)照,同步采用全站儀和高塔棱鏡進(jìn)行標(biāo)定,兩者的標(biāo)定結(jié)論均為:被測(cè)雷達(dá)方位與俯仰測(cè)角系統(tǒng)誤差均為負(fù)偏差,且均在誤差容限內(nèi)(見表2)。無人機(jī)法與標(biāo)校塔法相對(duì)偏差約為被測(cè)雷達(dá)誤差指標(biāo)的1/10,而全站儀和高塔棱鏡檢定精度優(yōu)于被測(cè)雷達(dá)誤差指標(biāo)的1/10。因此無人機(jī)標(biāo)校系統(tǒng)精度優(yōu)于該雷達(dá)誤差指標(biāo)的1/5,滿足該雷達(dá)標(biāo)校需求。

表2 無人機(jī)法與標(biāo)校塔法標(biāo)校結(jié)果對(duì)比表
5 結(jié)語
基于雙模無人機(jī)的標(biāo)校系統(tǒng)具有以下特點(diǎn):
1)標(biāo)校形式靈活、動(dòng)態(tài)、經(jīng)濟(jì)。可采用雙模無人機(jī)搭載綜合標(biāo)校設(shè)備構(gòu)建快速部署標(biāo)校系統(tǒng),部分替代利用標(biāo)校塔、標(biāo)校車、軍機(jī)的傳統(tǒng)標(biāo)校方式。
2)空饋接力傳輸信號(hào),兼容性好。信號(hào)源/信標(biāo)機(jī)無需搭載升空,可選品種豐富,易于控制信號(hào)的延時(shí)、多普勒頻移等參數(shù),同時(shí)規(guī)避了這類設(shè)備受體積、重量、供電等因素限制難以搭載升空的問題。
3)支持多個(gè)不同頻段的雷達(dá)同時(shí)標(biāo)校、雷達(dá)與光電設(shè)備聯(lián)合標(biāo)校。搭載的綜合標(biāo)校設(shè)備采用寬頻天線,可支持不同波段的雷達(dá)同時(shí)進(jìn)行標(biāo)校,也可支持雷達(dá)與光電設(shè)備聯(lián)合標(biāo)校。
4)系留和自由放飛兩種工作模式,適合多種場(chǎng)景、多種環(huán)境條件下的雷達(dá)標(biāo)校。
標(biāo)校試驗(yàn)結(jié)果表明,雙模無人機(jī)的懸停穩(wěn)定精度高,射頻鏈路計(jì)算準(zhǔn)確,標(biāo)校精度能夠滿足某艦載雷達(dá)的標(biāo)校需求。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國(guó)病理生理雜志(2015年8期)2015-12-21 12:38:06