基于最大圖像清晰度的泛探雷達(dá)目標(biāo)距離-多普勒走動校正
2023-12-08 06:21:56李云莉唐先慧葉祥龍陸炫宇
現(xiàn)代雷達(dá) 2023年10期
關(guān)鍵詞:方法
李云莉,蔣 文,唐先慧,葉祥龍,陸炫宇
(四川九洲電器集團(tuán)有限責(zé)任公司, 四川 成都 621000)
0 引 言
泛探雷達(dá)基于陣列天線技術(shù),充分利用天線口徑,實(shí)現(xiàn)同時(shí)多波束。整個(gè)探測空域的波束對目標(biāo)進(jìn)行凝視探測從而可以實(shí)現(xiàn)長時(shí)間的相干積累,改進(jìn)雷達(dá)發(fā)射功率的利用率,提高雷達(dá)對微弱目標(biāo)的檢測和識別能力[1-3]。常規(guī)波束掃描體制雷達(dá),波束在每個(gè)指向的駐留時(shí)間有限,可供相干積累的回波數(shù)目有限。為了進(jìn)一步提高檢測概率,只能利用多個(gè)掃描周期的信息進(jìn)行非相干積累。已經(jīng)證明非相干積累總會發(fā)生積累損失,所獲得的信噪比低于相干積累[4],對于泛探雷達(dá)長時(shí)間的相干積累,積累時(shí)間僅取決于系統(tǒng)相關(guān)性和目標(biāo)運(yùn)動特性,不受波束掃描時(shí)間影響[5],可大大提升積累增益,提高雷達(dá)的目標(biāo)檢測性能。然而長時(shí)間的相干積累會增加運(yùn)動目標(biāo)的距離走動量和多普勒走動量,對于高速機(jī)動目標(biāo),走動現(xiàn)象更加明顯。距離走動和多普勒走動會導(dǎo)致目標(biāo)在距離—多普勒域呈現(xiàn)散焦(跨距離和多普勒單元),影響雷達(dá)檢測性能[6-8]。因此有效地進(jìn)行目標(biāo)距離、多普勒走動的補(bǔ)償才能更好地體現(xiàn)泛探雷達(dá)的長時(shí)間相干積累特性。盡管泛探雷達(dá)還會存在目標(biāo)跨波束現(xiàn)象[9],但考慮對于微弱目標(biāo),例如低慢小弱目標(biāo)(在積累時(shí)間內(nèi)仍然在一個(gè)波束范圍內(nèi)運(yùn)動)和高速運(yùn)動弱目標(biāo)(通常探測距離高達(dá)上百公里),雷達(dá)波束幅寬足夠大,目標(biāo)仍不足以跨波束,因此本文不考慮泛探雷達(dá)的目標(biāo)跨波束現(xiàn)象。
目前,已有許多國內(nèi)外專家學(xué)者對目標(biāo)的距離走動、多普勒走動的補(bǔ)償方法進(jìn)行研究。在合成孔徑雷達(dá)(SAR)成像領(lǐng)域,文獻(xiàn)[10-11]提出利用keystone變換進(jìn)行由于平臺運(yùn)動導(dǎo)致的圖像散焦問題。文獻(xiàn)[12-13]提出自聚焦的方法進(jìn)行相位補(bǔ)償,建立相位誤差和圖像質(zhì)量的函數(shù)關(guān)系式,利用優(yōu)化的方法實(shí)現(xiàn)相位誤差的補(bǔ)償。在雷達(dá)探測領(lǐng)域,文獻(xiàn)[5]提出結(jié)合keystone 變換與 Dechirping方法相結(jié)合進(jìn)行相參積累的多目標(biāo)檢測方法,但是該方法的多普勒維度補(bǔ)償需要進(jìn)行多通道的加速度搜索,對于最大搜索加速度、搜索步長沒有給出定量的計(jì)算,極易產(chǎn)生誤差,同時(shí)該方法只針對存在加速度的情況,未考慮更高階運(yùn)動。文獻(xiàn)[6]對于勻加速運(yùn)動目標(biāo),只考慮一階距離單元走動,提出了keystone變換和改進(jìn)離散多項(xiàng)式相位變換的長時(shí)間相參積累算法,無法對距離彎曲進(jìn)行校正。同時(shí)文獻(xiàn)[6]提出的高階運(yùn)動目標(biāo)回波長時(shí)間積累算法,將長時(shí)間劃分多個(gè)片段,再進(jìn)行段間的非相參積累,該算法忽略了段間的距離走動,同時(shí)分段受限。文獻(xiàn)[7]對于勻加速運(yùn)動目標(biāo),提出了基于Radon呂分布的相參積累算法;對于變加速運(yùn)動,提出了基于KT和廣義去調(diào)頻處理的相參積累算法。上述兩種方法都是針對于單一運(yùn)動模型,對于時(shí)變模型,不具備適應(yīng)性;同時(shí)需要提前確定距離搜索范圍、速度搜索范圍、加速度搜索范圍以及搜索步長,搜索參數(shù)設(shè)置規(guī)則未知;此外對于慢速運(yùn)動目標(biāo),校正性能下降。文獻(xiàn)[14] 提出慢速小目標(biāo)距離分段長時(shí)間積累算法,該方法需要目標(biāo)運(yùn)動參數(shù)的先驗(yàn)信息,求取目標(biāo)距離和多普勒變化階數(shù),劃分距離段,再設(shè)計(jì)相應(yīng)校正算法。文獻(xiàn)[15]利用分?jǐn)?shù)階傅里葉變換形成掃頻濾波器組,實(shí)現(xiàn)對每個(gè)多普勒頻率檢測單元進(jìn)行二次相位補(bǔ)償。該方法以目標(biāo)不出現(xiàn)跨距離單元走動為前提,對于跨距離單元走動的情況,不能達(dá)到較好的積累效果。
本文提出一種基于最大圖像清晰度的泛探雷達(dá)的目標(biāo)距離-多普勒走動校正方法(BSRD)。圖像清晰度是指圖像清晰度和圖像邊緣的銳利程度,銳度越大,圖像細(xì)節(jié)對比度會變得更高,圖像更清楚。基于最大圖像清晰度的泛探雷達(dá)的目標(biāo)距離-多普勒走動校正方法,通過對目標(biāo)進(jìn)行長時(shí)間觀測,從而獲得目標(biāo)較高的多普勒分辨率;在距離-多普勒域,推導(dǎo)出目標(biāo)在距離-多普勒域中的多普勒走動量和圖像銳度的數(shù)學(xué)表達(dá)式,根據(jù)最大圖像清晰度準(zhǔn)則利用坐標(biāo)下降方法(CD)建立相應(yīng)的優(yōu)化模型,利用一元優(yōu)化求解的方法迭代計(jì)算出多普勒走動量并補(bǔ)償。本方法相較于已有的距離-多普勒走動校正方法而言,其優(yōu)勢在于不需要任何先驗(yàn)信息,適應(yīng)于任意幾何構(gòu)型,不受限于目標(biāo)運(yùn)動模型、運(yùn)動速度等,能夠?qū)δ繕?biāo)的跨距離單元和跨多普勒單元現(xiàn)象進(jìn)行校正,仿真驗(yàn)證了該方法的有效性。
1 問題建模與算法設(shè)計(jì)
1.1 問題建模
為了方便表述本文內(nèi)容,首先定義如表1所示符號。
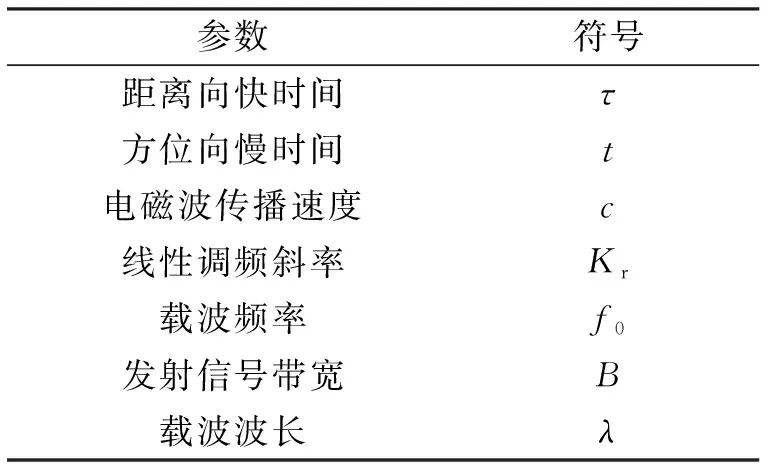
表1 設(shè)置參數(shù)符號Tab.1 Parameter setting
以典型勻加速運(yùn)動目標(biāo)為例,建立以雷達(dá)為原點(diǎn)的直角坐標(biāo)系,如圖1所示。其中1指代目標(biāo),距離雷達(dá)的初始距離為R0,與Y軸的初始夾角為θ,沿著Y軸以初始速度v、加速度為a勻加速飛行(靠近雷達(dá)時(shí),目標(biāo)速度為正,遠(yuǎn)離雷達(dá)時(shí),目標(biāo)速度為負(fù))。任意t時(shí)刻,目標(biāo)的瞬時(shí)距離為R(t),表達(dá)式為
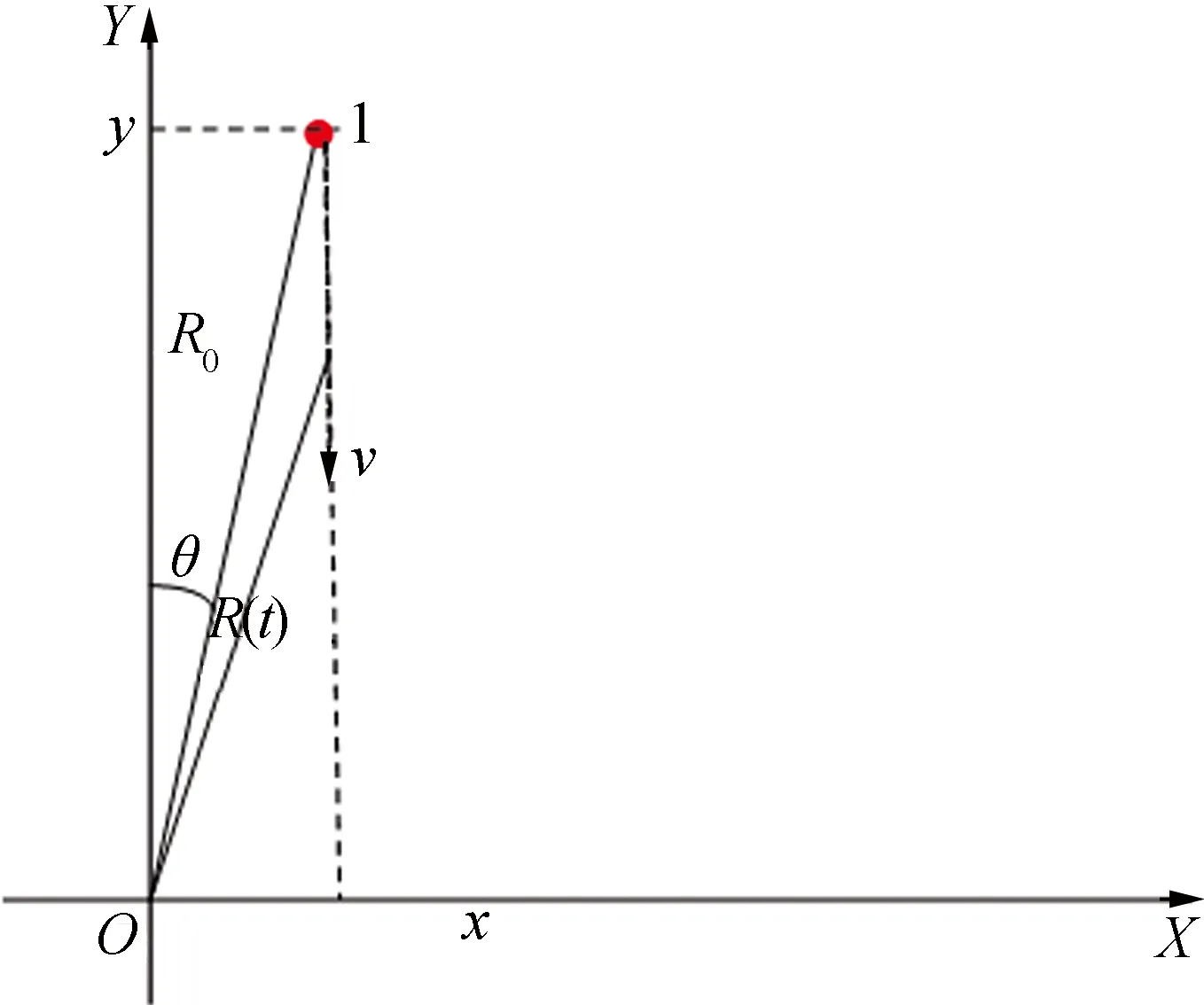
圖1 幾何構(gòu)型Fig.1 Geometrical configuration
(1)
對式(1)在t=0附近作泰勒級數(shù)展開,并忽略三階及以上項(xiàng)可得
(2)
假設(shè)雷達(dá)發(fā)射調(diào)頻脈沖,回波信號為
(3)
以上四項(xiàng)分別記為距離向包絡(luò)、方位向包絡(luò)、發(fā)射信號相位以及多普勒調(diào)制項(xiàng)。
首先對接收到的回波信號進(jìn)行距離維脈沖壓縮處理。距離壓縮過程表示為
src(τ,t)=IFFT(s(fτ,t)H(fτ))
(4)
式中:H(fτ)為參考函數(shù)的響應(yīng)函數(shù);s(fτ,t)為回波在快時(shí)間域的傅里葉變換。將式(3)在快時(shí)間域進(jìn)行傅里葉變換后代入式(4)得到距離壓縮的結(jié)果為
exp(-j(2π/λ)(2R(t))
(5)
式中:sinc(·)為距離脈沖壓縮響應(yīng)函數(shù)。從式(5)可以看出脈壓后的包絡(luò)與有關(guān),隨著其變化產(chǎn)生相應(yīng)的偏移,即距離走動,需要采用對應(yīng)的手段進(jìn)行距離走動的校正。
1.2 算法設(shè)計(jì)
本文提出的目標(biāo)二維走動校正算法,即基于最大圖像清晰度的泛探雷達(dá)目標(biāo)距離-多普勒走動校正算法,主要包含兩大步驟,即基于keystone變換的距離走動校正和基于最大圖像清晰度的多普勒走動校正。基于keystone變換的距離走動校正可以在保持回波相位的同時(shí),補(bǔ)償目標(biāo)的跨距離單元走動,從而為匹配濾波后的多普勒處理奠定了基礎(chǔ)。基于最大圖像清晰度的多普勒走動校正可以校正任意幾何構(gòu)型下引起的多普勒展寬,實(shí)現(xiàn)目標(biāo)在距離-多普勒域的聚焦,提升雷達(dá)目標(biāo)檢測的性能。算法流程如圖2所示。
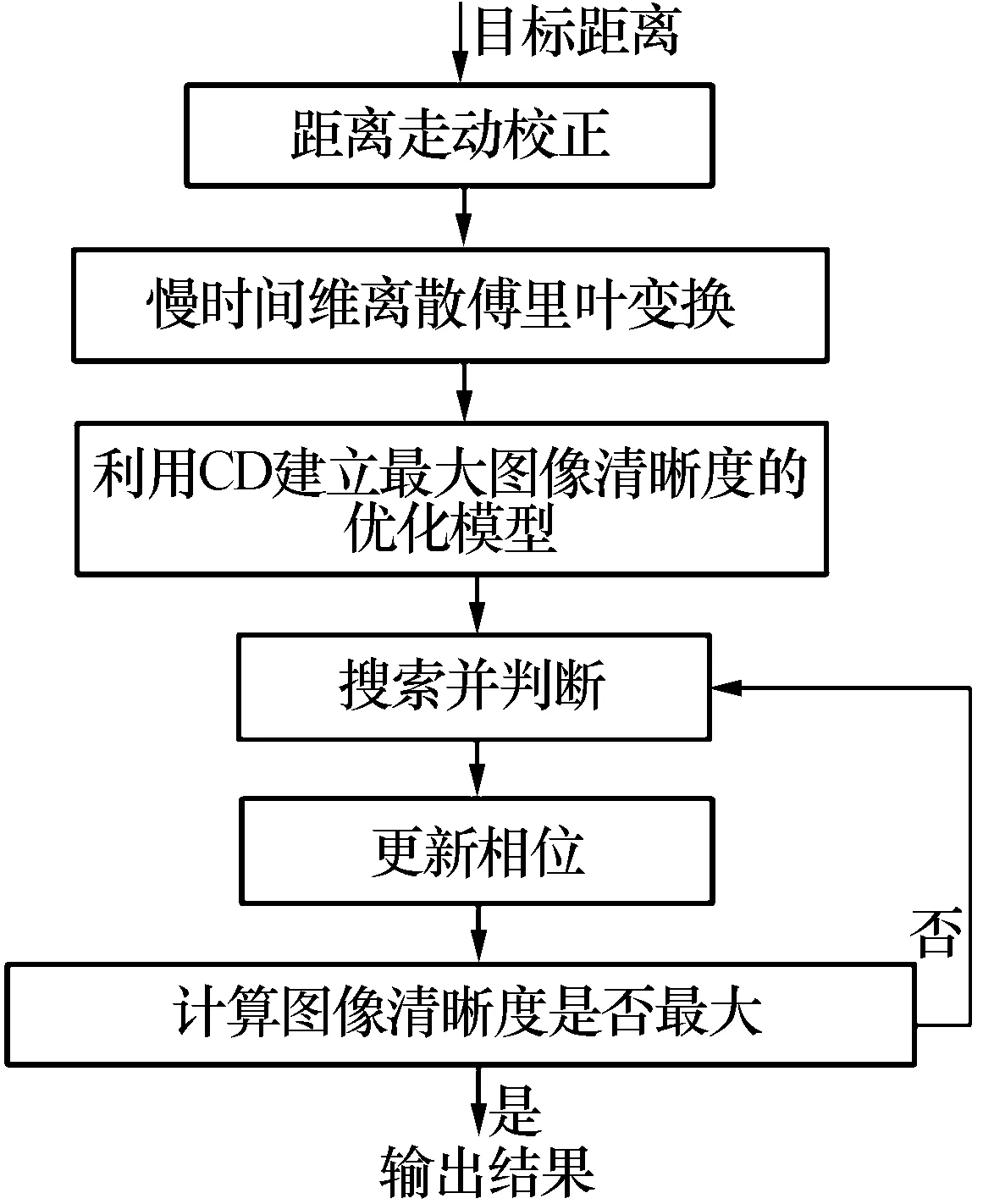
圖2 算法流程圖Fig.2 Algorithm flow chart
1.2.1 基于keystone變換的距離走動校正
結(jié)合式(5)可以看出,雷達(dá)的回波支撐域是一個(gè)二維平面,平面的坐標(biāo)軸分別是快時(shí)間和慢時(shí)間。在快時(shí)間域進(jìn)行傅里葉變換,將回波變換到頻率平面,所謂keystone變換,就是進(jìn)行變量代換, 以上變換使f-t平面上的矩形支撐域在f-τ平面上變成一個(gè)倒梯形,Keystone變換實(shí)際上是一種對軸的伸縮變換,伸縮幅度與頻率有關(guān),高頻拉伸幅度較大。經(jīng)變換之后,對于不同的發(fā)射脈沖,信號的峰值位置只與初始時(shí)刻目標(biāo)的位置有關(guān),而與脈沖信號的位置無關(guān)。
對式(5)進(jìn)行快時(shí)間域的傅里葉變換,并代入式(2)的結(jié)果為
src(fτ,t)=Awa(t)G2B(fτ)·
(6)
式中:A是系數(shù);G2B是距離包絡(luò)。令tm=(fc+fτ)t/fc,帶入式(6)進(jìn)行慢時(shí)間尺度變換,實(shí)現(xiàn)慢時(shí)間-快時(shí)間頻率解耦,即keystone 變換,整理后近似得到
(7)
(8)
對式(7)在快時(shí)間維進(jìn)行傅里葉反變換, 得
(9)
從式(9)可以看出,keystone 變換能近似實(shí)現(xiàn)慢時(shí)間-快時(shí)間頻率的解耦, 在積累時(shí)間之內(nèi)不會出現(xiàn)距離單元走動, 但此時(shí)多普勒走動依然存在, 必須進(jìn)行相應(yīng)的補(bǔ)償,故而進(jìn)行進(jìn)一步的補(bǔ)償多普勒走動。
1.2.2 基于最大圖像清晰度的多普勒走動校正
圖像清晰度是指圖像清晰度和圖像邊緣的銳利程度,清晰度越大,圖像細(xì)節(jié)對比度會變得更高,圖像更清楚。因此,可以利用圖像清晰度來衡量距離-多普勒域中目標(biāo)聚焦的好壞,反映了多普勒維是否存在展寬。
快時(shí)間τ的采樣值記為τNr,慢時(shí)間tm的采樣值記為(tm)Na。其中Nr和Na分別表示快時(shí)間維度和慢時(shí)間維度的采樣點(diǎn),有Nr∈[1,M],Na∈[1,N]。式(9)進(jìn)行慢時(shí)間維的離散傅里葉變換,得到距離-多普勒域結(jié)果為
(10)
式中:f表示多普勒域頻率。根據(jù)式(10)將目標(biāo)運(yùn)動引起的多普勒走動以相位走動的形式表示,即目標(biāo)在每個(gè)運(yùn)動時(shí)刻存在相位走動φ(tm)Na,將式(10)修正為
exp(jφ(tm)Na)exp(-jω(tm)Na)
(11)
src′(τNr,(tm)Na)=src′0(τNr,(tm)Na)exp(jφ(tm)Na)
(12)
式中:src′0(τNr,(tm)Na)為目標(biāo)不存在多普勒走動的脈壓結(jié)果。 因此,根據(jù)式(12),需要將相位走動φ(tm)Na補(bǔ)償?shù)?表示為
(13)

式(13)得到目標(biāo)距離-多普勒域結(jié)果和待估計(jì)相位走動量的關(guān)系式。考慮到該關(guān)系式下的誤差求解不存在閉集解,本算法將使用坐標(biāo)下降(CD)的迭代方法來求解最優(yōu)解。

n=1,2,…N
(14)


(15)
其中
(16)
式中:yy表示未校正的第q個(gè)頻點(diǎn)及其幅值;xx表示除了第q個(gè)頻點(diǎn)的其他所有頻點(diǎn)的線性組合。
在距離多普勒域中第l個(gè)像素點(diǎn)的銳度可以表示為
(17)
(18)
其中l(wèi)∈[1,L],L為所有像素點(diǎn)的個(gè)數(shù),L=M×N。即在坐標(biāo)下降下將多維優(yōu)化求解化為單變量求極值問題
(19)
2 仿真驗(yàn)證
為了驗(yàn)證本文所提算法的有效性,設(shè)計(jì)如表2所示的仿真參數(shù)進(jìn)行試驗(yàn),結(jié)果如下。

表2 仿真參數(shù)Tab.2 Simulation parameter
圖3展示了目標(biāo)未進(jìn)行走動校正的結(jié)果,可以看出,此時(shí)目標(biāo)在距離-多普勒域中為一條斜線,距離維和多普勒維均跨分辨單元,不能對目標(biāo)進(jìn)行準(zhǔn)確的檢測。
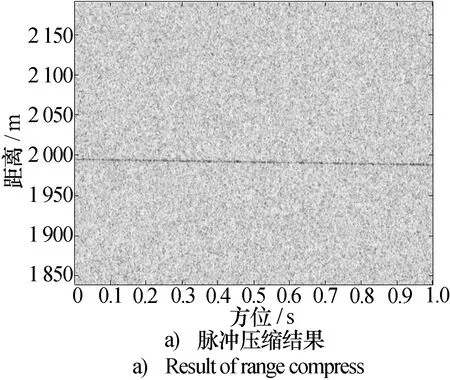
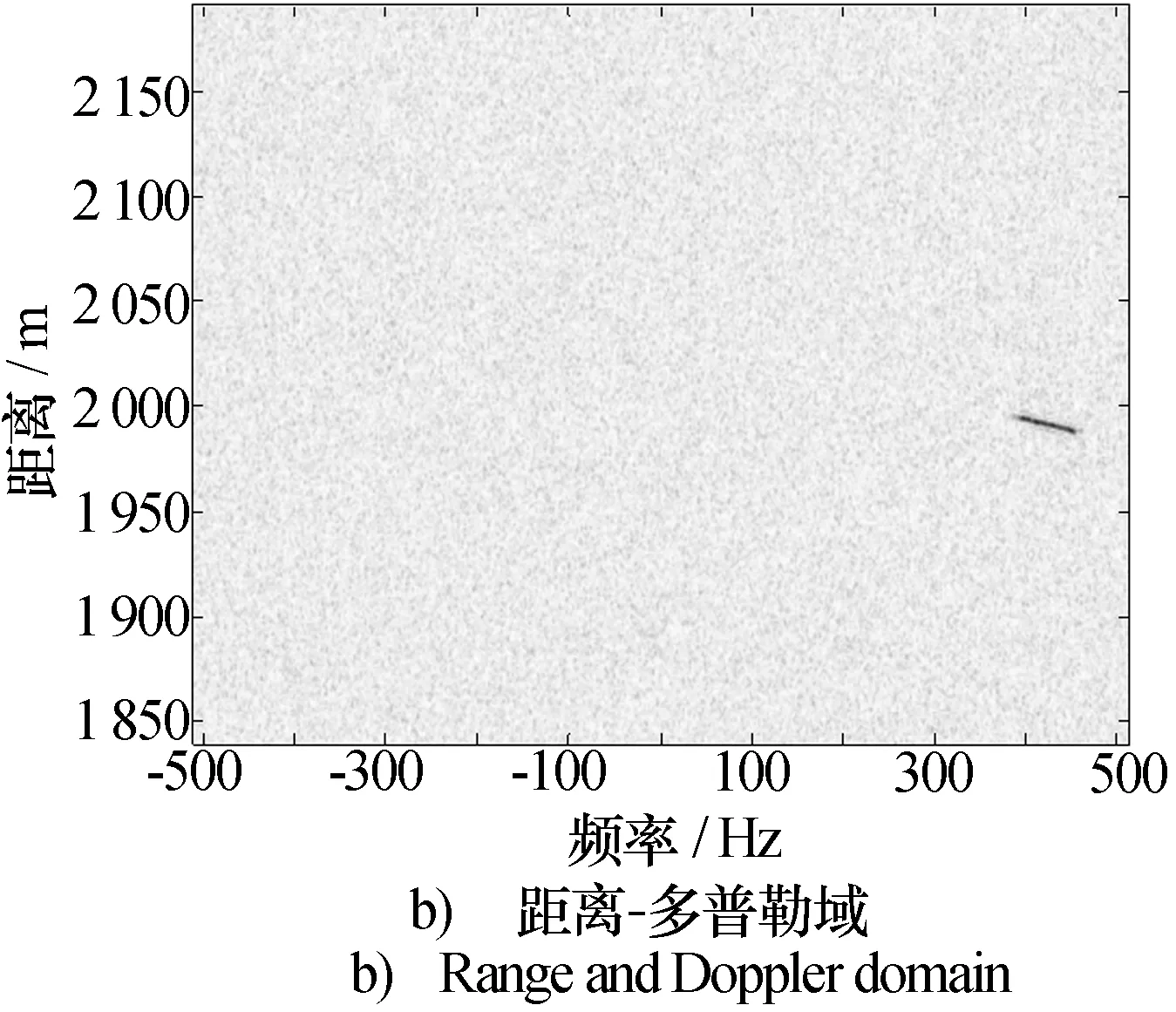
圖3 距離-多普勒走動校正前Fig.3 Result before range-Doppler deviation correction
利用keystone變換對目標(biāo)進(jìn)行走動校正后,結(jié)果如圖4所示。此時(shí)目標(biāo)距離維走動被校正,但是多普勒維的走動依然存在。在距離-多普勒域建立最大圖像清晰度模型后,在多普勒維以多普勒分辨為步長進(jìn)行搜索,當(dāng)目標(biāo)距離-多普勒域圖像清晰度最大時(shí),搜索完成,結(jié)果如圖5所示。可以看出,多普勒維由展寬的線聚焦成一個(gè)亮點(diǎn)。根據(jù)圖6所示的距離維和方位維剖面可以看出,目標(biāo)能量聚焦,檢測信噪比提升。
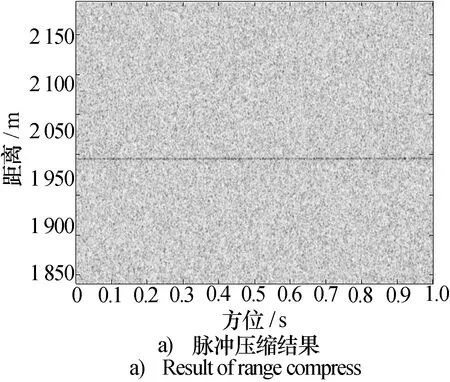

圖4 距離走動校正Fig.4 Result after range deviation correction
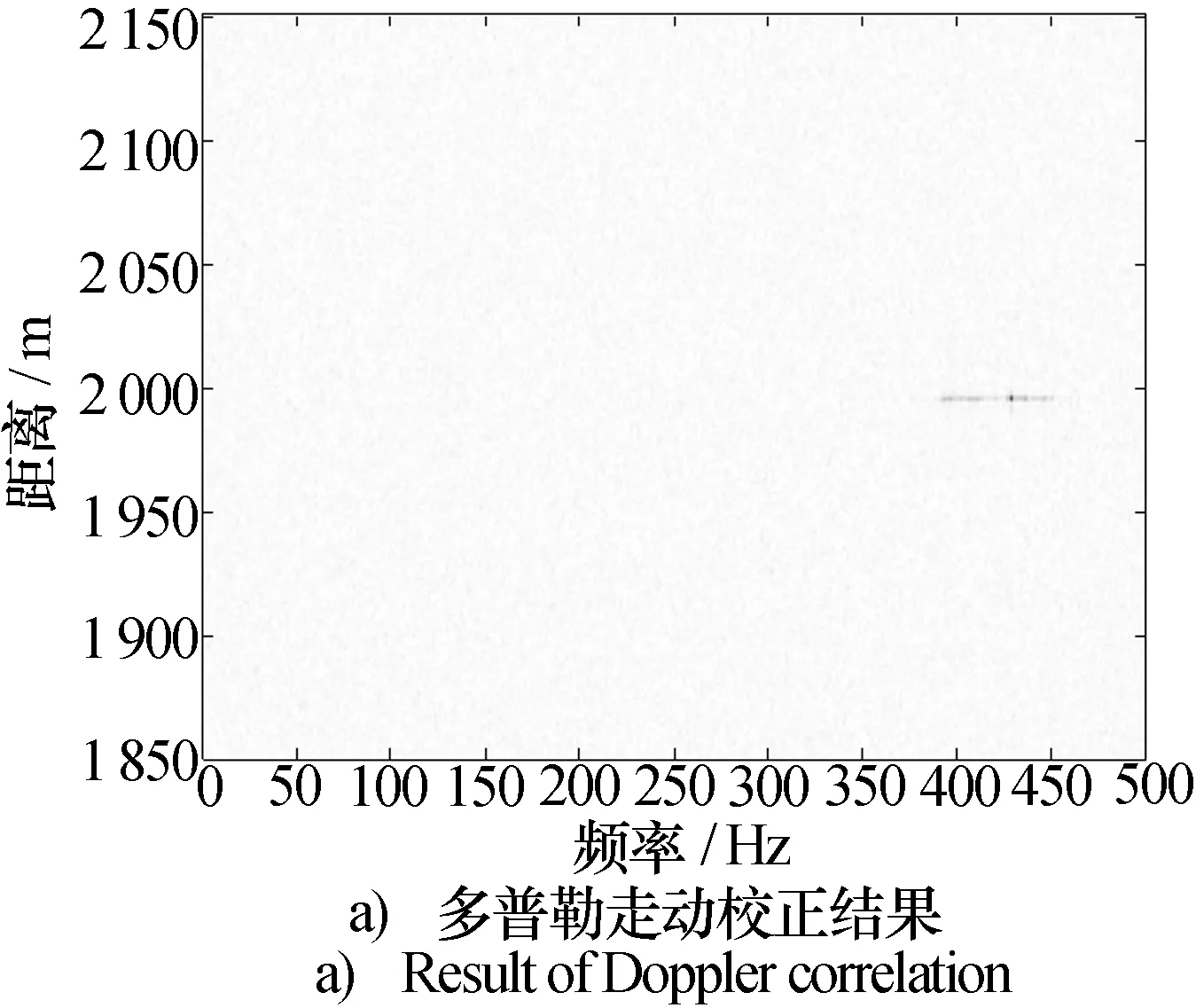
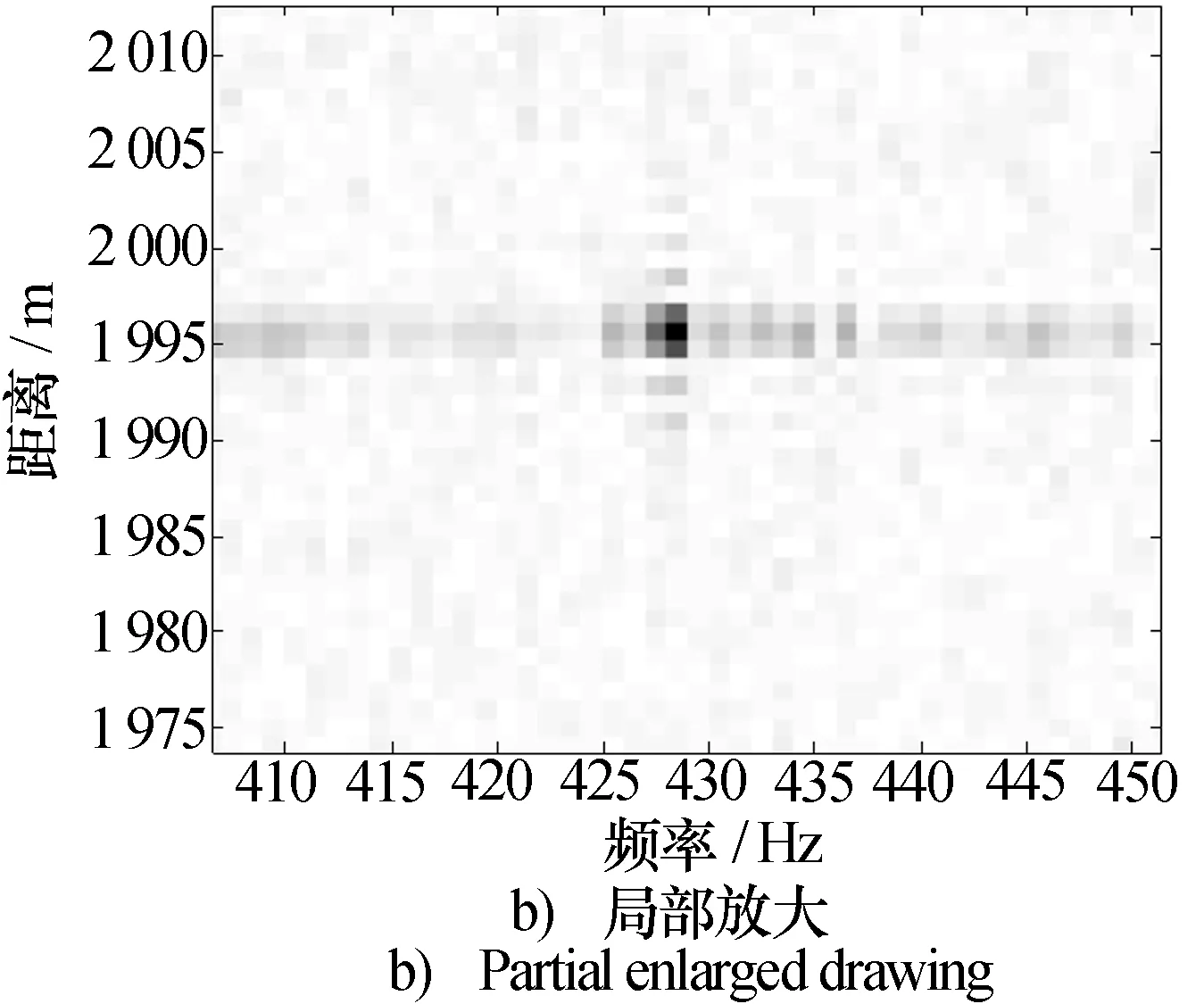
圖5 多普勒走動校正Fig.5 Result after Doppler deviation correction
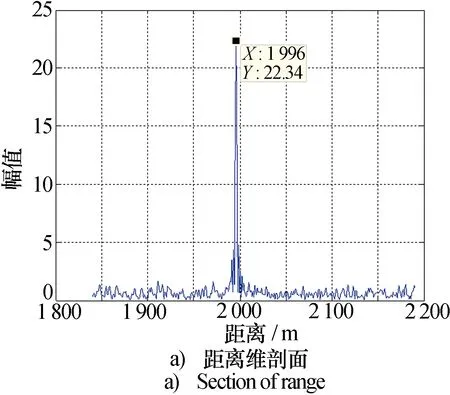

圖6 校正后剖面Fig.6 Section of Range and Doppler after correction
此外,為了驗(yàn)證本算法不受限于幾何構(gòu)型同時(shí)具有較高的校正性能,基于表2系統(tǒng)仿真參數(shù),設(shè)計(jì)目標(biāo)距離歷史呈正弦變化,變化周期為4 s。1 s積累時(shí)間內(nèi)目標(biāo)距離歷史如圖7所示。
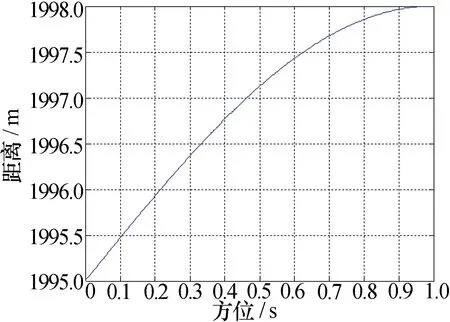
圖7 目標(biāo)距離歷史Fig.7 Range hisotry of target
設(shè)計(jì)目標(biāo)回波信號信噪聲為-10 dB,分別利用二階Keystone變換、Keystone變換和Dechirping搜索補(bǔ)償?shù)姆椒ㄒ约氨疚姆椒ǚ謩e對距離走動和多普勒走動進(jìn)行校正,得到結(jié)果分別如圖8所示。可以看出,在目標(biāo)非均勻運(yùn)動的情況下,原始距離多普勒域圖像中目標(biāo)能量散焦,主瓣拖尾較為嚴(yán)重,旁瓣能量較高。經(jīng)上述三種方法校正后,均可以降低旁瓣,校正主瓣展寬現(xiàn)象。經(jīng)圖9的剖面分析對比后,本文所提方法主瓣明顯變窄,旁瓣降低,峰值旁瓣比為-23.36 dB,計(jì)算得到二階Keystone變換補(bǔ)償后峰值旁瓣比為-3.32 dB,Keystone變換和Dechirping搜索補(bǔ)償后峰值旁瓣比為-3.47 dB。因此本文所提算法校正性能較優(yōu)。
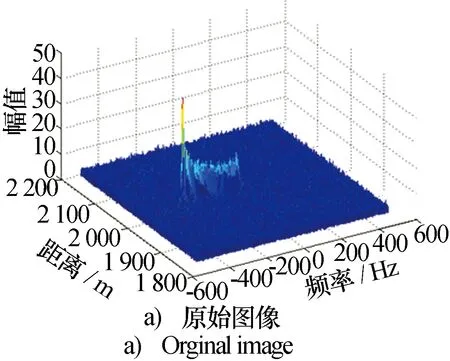
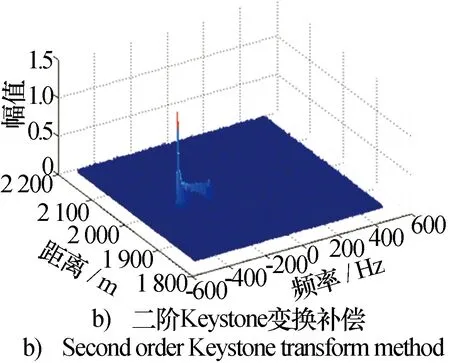
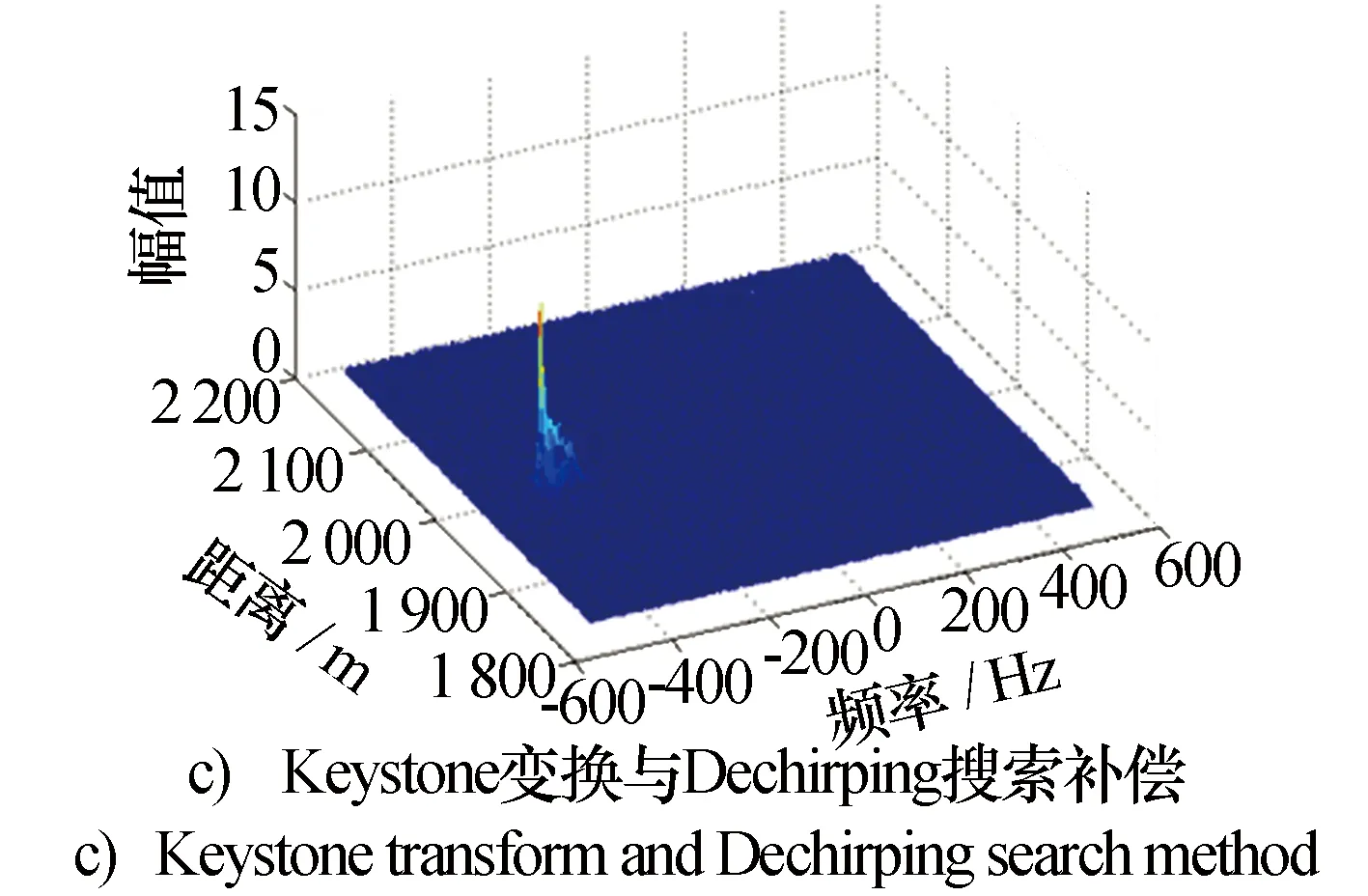
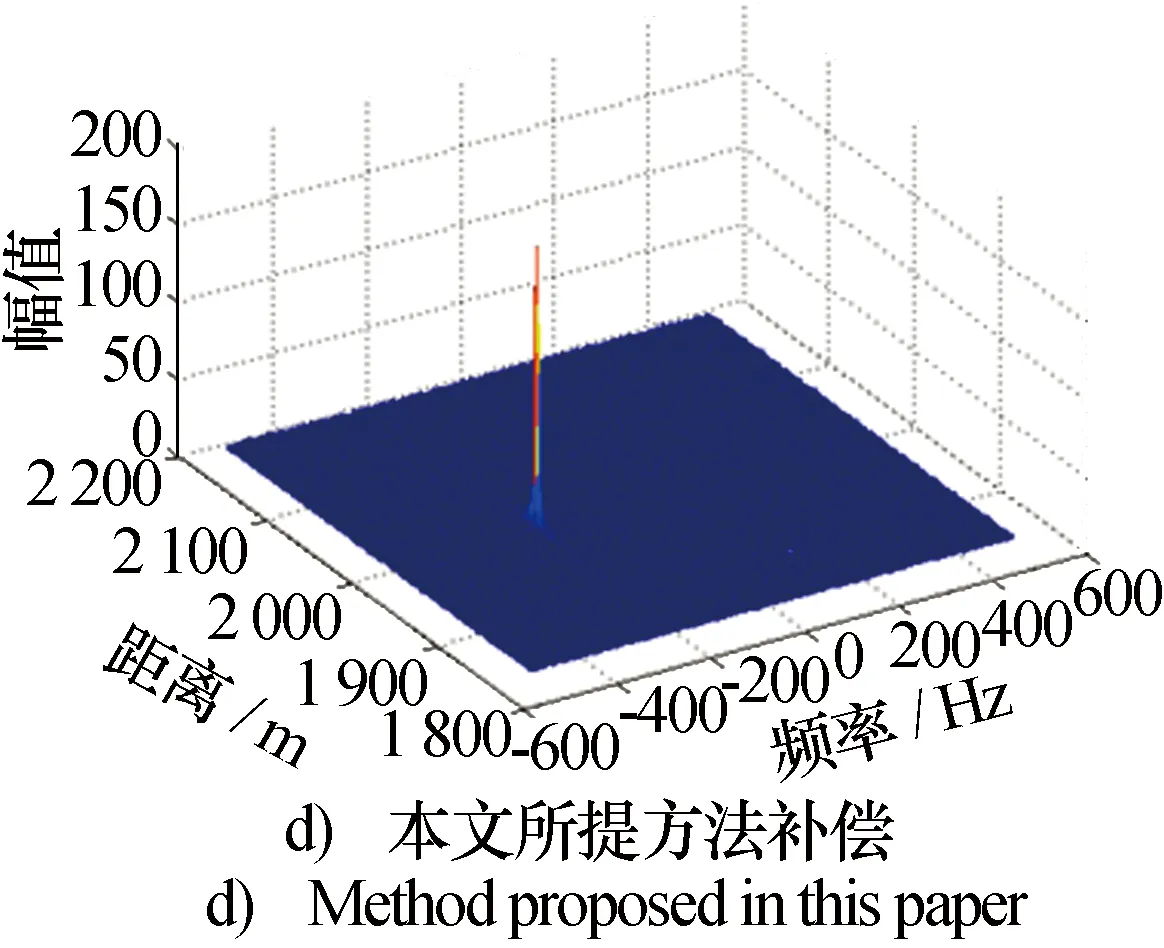
圖8 不同方法校正結(jié)果Fig.8 Results of different methods
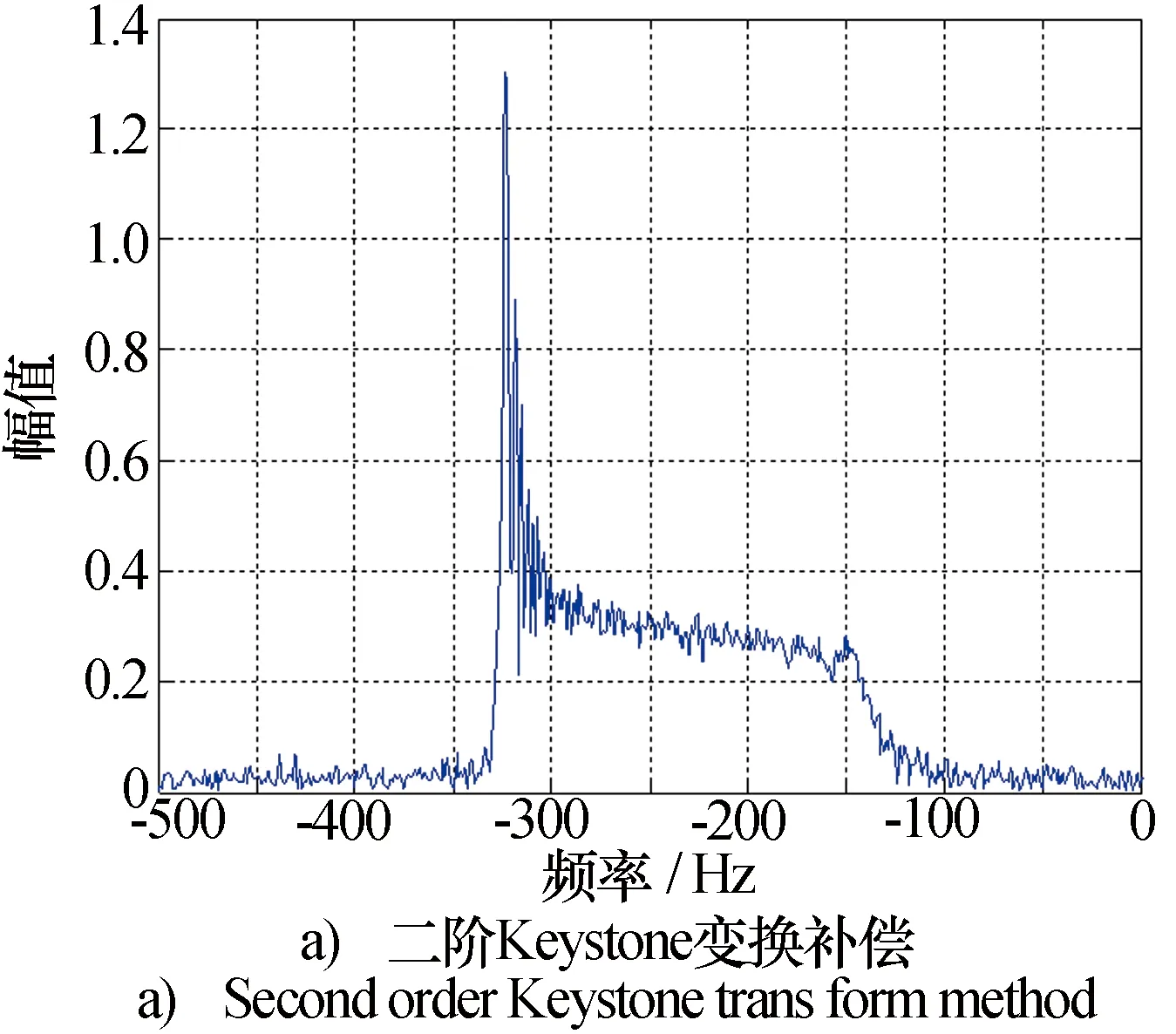
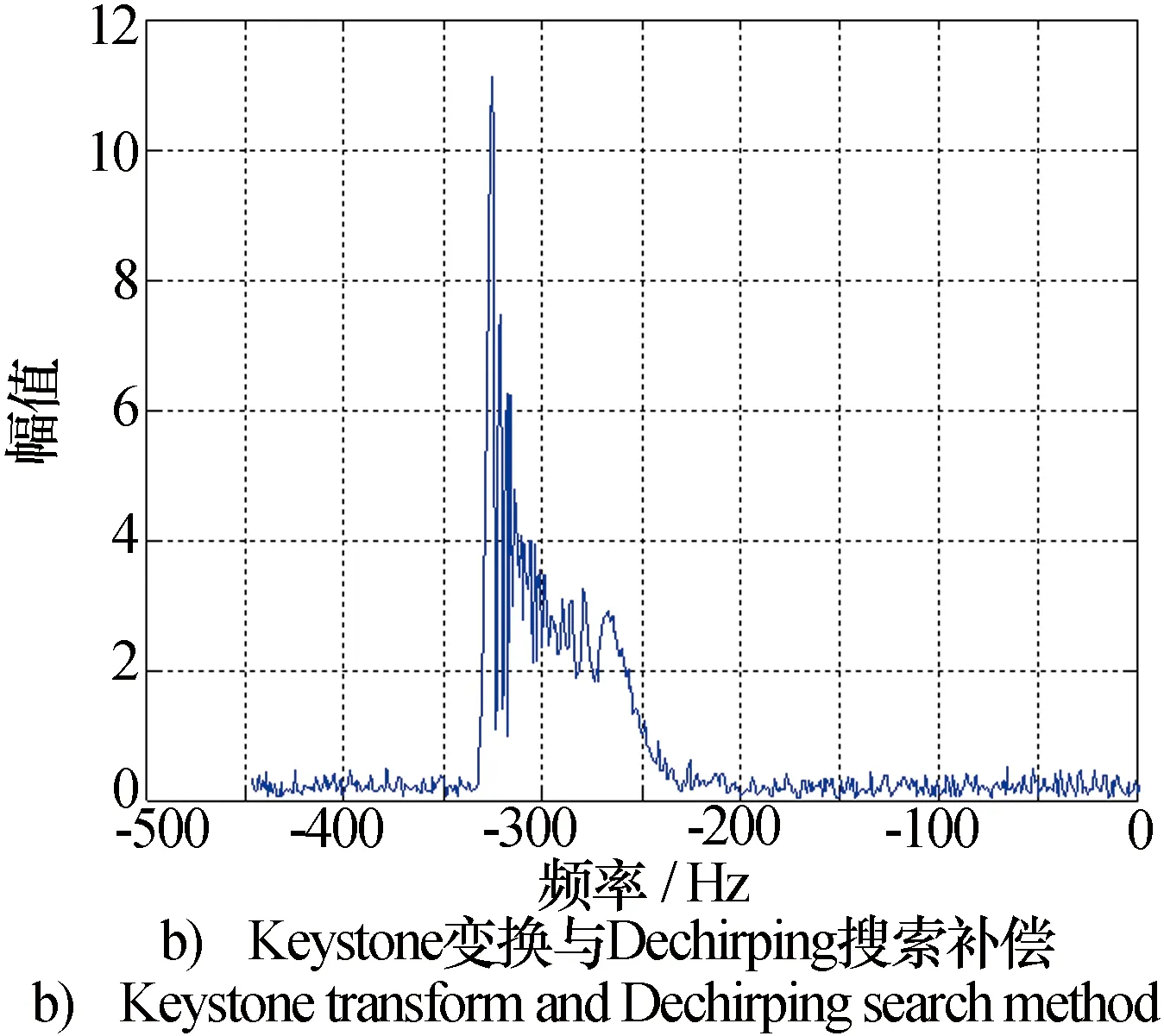
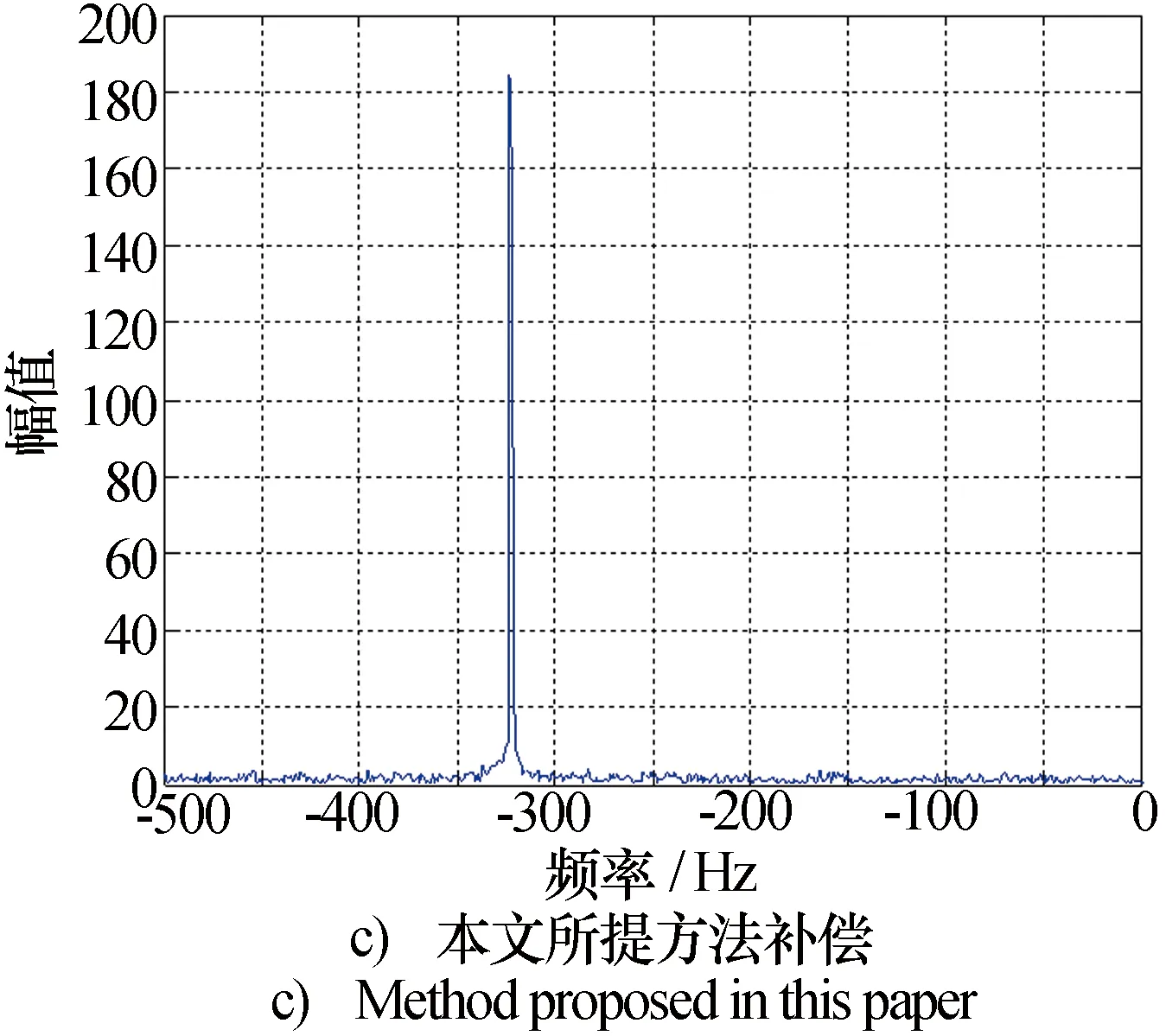
圖9 不同方法校正結(jié)果的多普勒剖面圖Fig.9 Section of Doppler of different methods
3 結(jié)束語
泛探雷達(dá)利用同時(shí)多個(gè)接收波束覆蓋整個(gè)觀測空域,可利用長時(shí)間相參積累提高目標(biāo)檢測性能,然而必須解決目標(biāo)在長積累時(shí)間之內(nèi)出現(xiàn)跨波束、跨距離單元和跨多普勒單元現(xiàn)象帶來的積累增益下降問題。忽略跨波束影響,本文提出的基于最大圖像清晰度的泛探雷達(dá)目標(biāo)距離-多普勒走動校正方法,不需要任何先驗(yàn)信息,適應(yīng)于任意幾何構(gòu)型,不受限于目標(biāo)運(yùn)動狀態(tài),可以有效地解決在泛探雷達(dá)長時(shí)間積累下的跨距離單元、跨多普勒單元的問題,充分體現(xiàn)出泛探雷達(dá)在目標(biāo)多普勒域的高分辨特性。目標(biāo)在距離多普勒域的二維高分辨、高信噪比,可用于雷達(dá)系統(tǒng)的高分辨探測、自聚焦成像以及強(qiáng)點(diǎn)特征識別,在探測、成像和識別一體化方向具有較強(qiáng)的應(yīng)用前景。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56