應用在自動門上的直線電機控制系統設計
2023-12-08 12:31:24鞠振宇
電子制作 2023年22期
鞠振宇
(安徽理工大學 電氣與信息工程學院,安徽淮南,232001)
0 引言
隨著現代社會的快速進步,經濟和科學技術得到了質的提高。因此,越來越多的高檔場所如酒店、商場、銀行等,在他們的入口處采用更加方便、美觀、智能的自動門控制系統。
據《紐約時報》的記載,最早的自動門是由美國的史丹利公司于1930 年推出的,當時由于受技術的限制,那個年代的自動門是由油壓、空壓進行驅動的,運行效果與運行效率都不太好。然而隨著后面電氣控制技術的發展,電力電子與電機控制技術越來越成熟,于是便出現了采用電機驅動的自動門,運行效果與運行效率得到了很大的提升。
目前市場上大部分的自動門控制系統,基本結構都是由旋轉電機、減速器、傳動裝置所組成,通過減速器把旋轉電機的轉速減小,轉矩增大,再由傳動裝置把電機的旋轉運動轉化為自動門所需要的直線運動,進而驅動門體進行開門與關門動作。但是其存在一些無法避免的缺點:旋轉電機、減速器和傳動裝置占用空間較大,需要預留足夠的空間才能安裝;由于機械傳動裝置的存在,不可避免地出現機械結構相互碰撞、摩擦產生的噪聲,和帶來的能量損失的問題。
本文設計了一種應用在自動門上的直線電機控制系統。因為直線電機可以直接產生直線運動,避免了旋轉電機由旋轉到直線的轉化過程,減少了減速器和傳動裝置,所以由直線電機驅動的自動門的效率更高,噪音更小,占用的額外空間更少。
1 系統整體設計
本方案設計的控制系統以ST 公司的STM32F446RET6單片機為控制核心,來實現自動門的開門、關門的功能。該控制系統主要由單片機電路、電源電路、磁耦隔離電路、驅動逆變電路、電流采樣電路和霍爾傳感器組成。具體結構框圖如圖1 所示。由外部直流24V 電源輸入給電源電路,電源電路可以分別產成+3.3V、+5V、+12V 電壓,給系統中的其他部分電路提供合適穩定的電壓;利用電流采樣電路采集永磁同步直線電機的三相電流,傳輸給單片機的ADC 接口對電機電流進行實時處理;然后STM32F446RET6 單片機通過計算,生成六路SVPWM 信號輸入給磁耦隔離電路,再由磁耦隔離電路輸入給驅動電路,驅動電路再通過逆變電路驅動永磁同步直線電機動作。
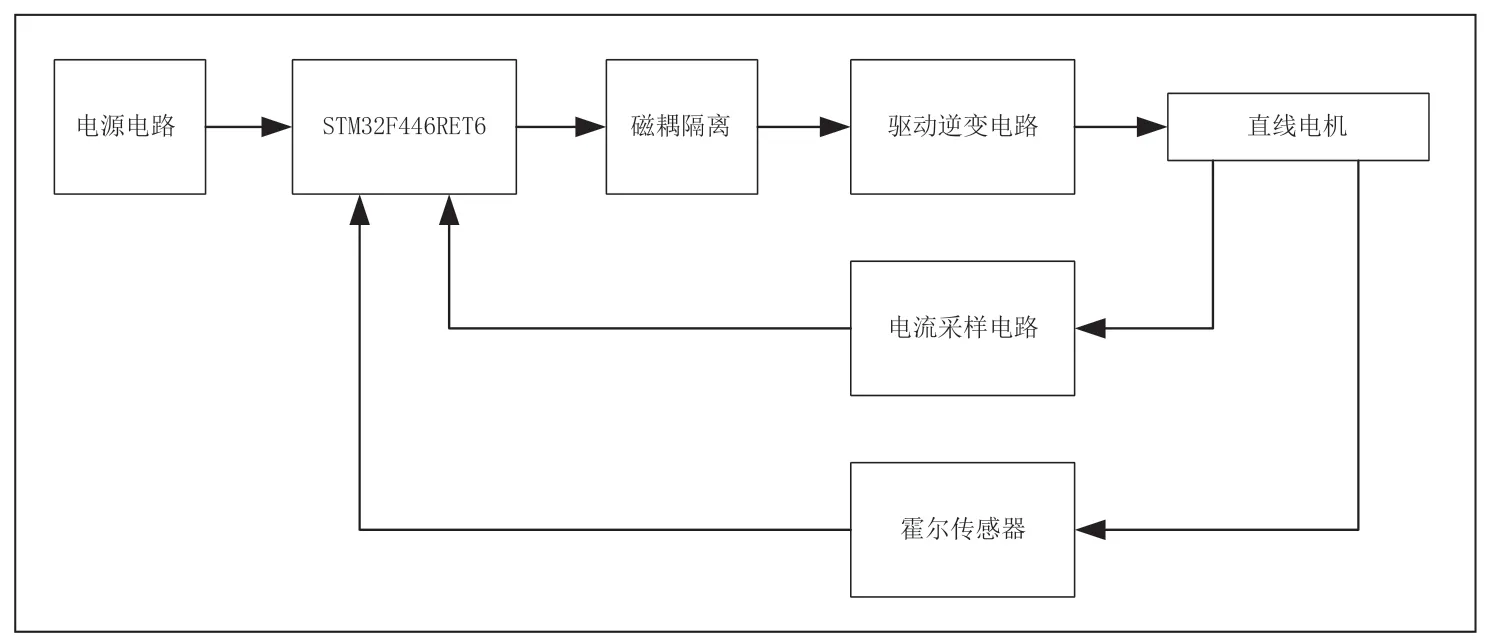
圖1 系統結構框圖
2 硬件電路設計
■2.1 電源電路
該控制系統的電源電路設計如圖2 所示。其中包含了+5V 供電電路,+3.3V 供電電路和+12V 供電電路,滿足了該系統所用電子元器件的所有供電需求,保證了系統的穩定性。
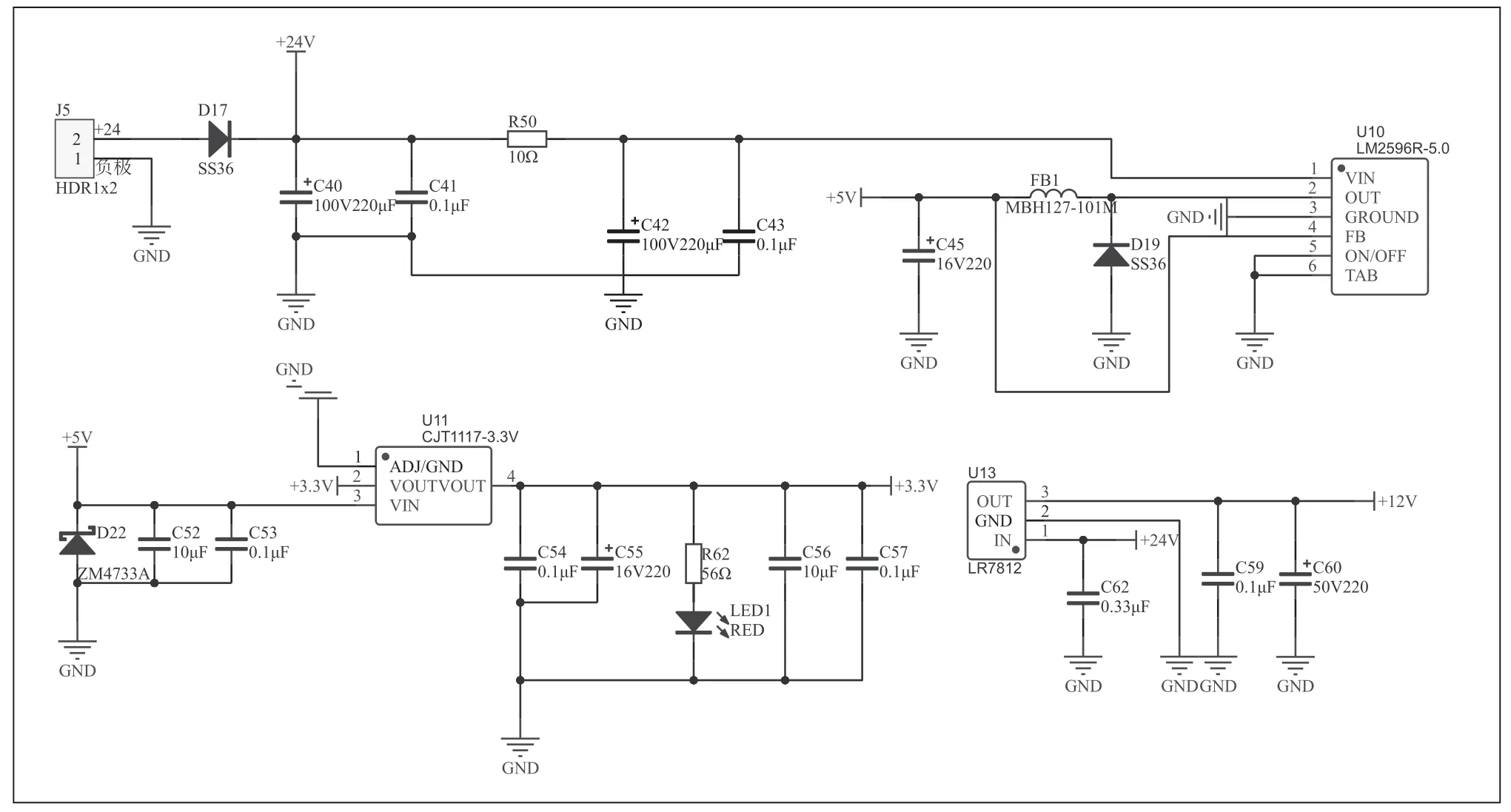
圖2 電源電路原理圖
該自動門控制系統由外部+24V 電源供電,+24V 電壓通過電源接口接入電路,利用SS36 二極管限制其電流的方向,由220μF 的電解電容和0.1μF 的貼片陶瓷電容進行濾波處理之后輸入給+5V 電源芯片,再由+5V 電源芯片輸出+5V電壓,輸出的+5V電壓再給+3.3V電源芯片,使其輸出+3.3V 電壓。
+5V 電源芯片我們采用的是德州儀器生產的LM2596R-5.0 芯片,該芯片為DC-DC 開關型電壓調節器,最大輸出電流為3A,轉換效率高達70%~90%,當它的ON/OFF 引腳為低電平時,此芯片開始工作,同時產生一個1.235V 的參考電壓,用來和反饋電壓進行比較,進而實現穩壓。FB 引腳接在電路的輸出端,通過輸出端的反饋電壓與基準電壓1.235V 進行比較,從而檢測輸出電壓是否偏離所需電壓,進而對芯片進行相應的穩壓控制。雖然該芯片已經問世很長時間了,但是其熱度一直沒有減少,因為他使用方便,性能穩定,現如今在很多場合仍然有很多人在使用該芯片;+3.3V 電源芯片我們采用的是江蘇長晶科技股份有限公司生產的CJT1117-3.3V 電源芯片,該芯片為低壓降線性穩壓器,輸入5V 電壓,輸出3.3V 電壓,最大輸出電流為1A。其價格低廉,外圍電路簡單,使用方便;+12V 電源芯片我們采用的是樂山無線電生產的LR7812 電源芯片,該芯片為3 端1A 正壓調節器,輸入24V,輸出12V。
■2.2 主控芯片電路
該控制系統的控制核心采用的是意法半導體生產的STM32F446RET6 處理器,STM32F446 集成了ARM Cortex-M4 內核,采用了90nm 的非易 失性存儲器(NonVolatile Memory)技術和自適應實時存儲器加速器(Adaptive Real-Time MemoryAccelerator)技術,使程序零等待運行,可以充分發揮出Cortex-M4 的性能。Flash容量為512KB,主頻最高為180MHz。
圖3 為STM32F446RET6 處理器的最小系統原理圖。
圖3 STM32F446RET6 最小系統原理圖
■2.3 磁耦隔離電路
為了防止電路故障時,電機驅動電路的大電流損害單片機,我們在單片機與電機驅動電路中間加入了磁耦隔離電路。我們采用的是德州儀器生產的SN74HC244N 緩沖器,該緩沖器是一款三態八路正向緩沖器,它具有兩個輸出使能端:1OE 與2OE,通過控制1OE 與2OE 端口上高低電平的變化,就可以自主選擇要導通的通道。當1OE 與2OE 的選通工作信號為低電平時,該緩沖器的輸出端Y 和輸入端A狀態相同;當1OE 與2OE 的選通工作信號為高電平時,輸出呈現高阻態。
圖4 為SN74HC244N 緩沖器電路的原理圖。
■2.4 驅動逆變電路
單片機輸出的SVPWM 信號經過磁耦隔離電路后,傳輸到電機驅動芯片上,來控制MOS 管的關斷驅動電機。我們采用的是英飛凌公司生產的IRS2003STRPBF 電機驅動芯片,該驅動芯片是一個高壓、高速功率的MOSFET 和IGBT驅動器,具有可靠的高側和低側參考輸出通道,供電電壓為10~20V,高壓側電壓最大值可達200V。MOS 管我們采用的是無錫新潔能公司生產的NCEP85T12 場效應管,該MOS 管為N 溝道電力MOS 場效晶體管,漏極與源極之間所能承受的最大電壓值為85V,可承受120A 的大電流,完全保障了使用要求。
圖5 為IRS2003STRPBF 電機驅動芯片與NCEP85T12場效應管所搭建的半橋電路原理圖。
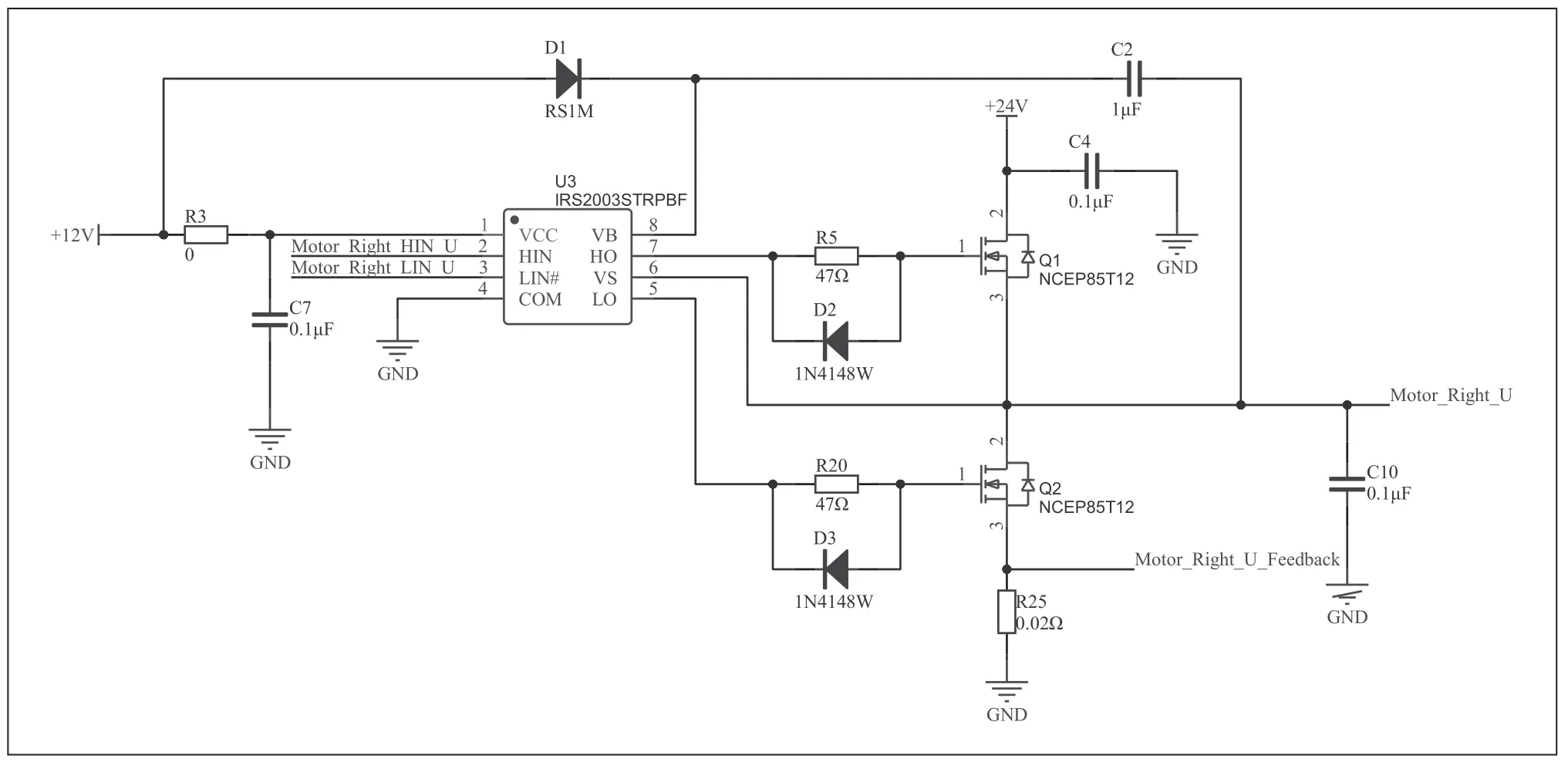
圖5 驅動逆變電路原理圖
■2.5 采樣放大電路
為了使電機運行更加地可靠,運行得更加平穩,我們需要對電機運行電流進行采樣,從而實現閉環控制。我們采用精密電阻采樣,把精密電阻串聯在下橋臂的源極與地之間,通過運算放大電路放大精密電阻上的電壓信號,傳輸給單片機進行運算處理,得到流經采樣電阻上的電流值。運算放大器我們采用的是德州儀器生產的LMV358AIDR 雙通道運算放大器芯片,輸入電壓范圍為0~6V,增益帶寬為1MHz。通過配置外圍電路,形成單極低通濾波器。運算放大倍數公式為:
式中:RF為反饋電阻;RG為反向輸入端到地之間的電阻;R1為輸入信號到正向輸入端之間的電阻;C1為正向輸入端與地之間的電容。
截止頻率計算公式為:
本運放電路的放大倍數通過以上公式計算得出為63倍,截止頻率為37kHz,滿足使用要求。圖6 為采用LMV358AIDR 芯片的運放電路原理圖。
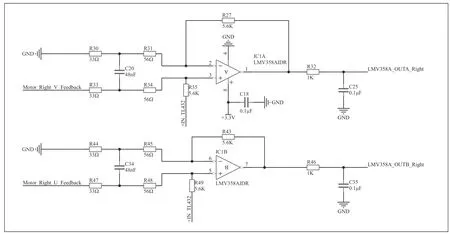
圖6 運算放大電路原理圖
3 軟件設計
該控制系統利用Keil5 為軟件開發平臺,編寫了整個控制系統的控制代碼,控制代碼采用C 語言進行編寫,語法清晰,結構簡單,便于開發與后期的調試。采用了STM32標準庫進行開發,使用方便,可讀性比較好,便于理解。我們采用了FOC(Field-Oriented Control)矢量控制算法,來控制永磁同步直線電機。FOC 矢量控制算法是通過控制磁場的大小和方向來進一步控制電機,從而實現平穩地轉矩、低噪音、高效率和高速動態響應。程序主要分為兩個部分:主函數部分和中斷部分。
■3.1 主函數
主函數主要初始化各個模塊,配置好時鐘、定時器、ADC 與UART 的初始化狀態,并給一些基本的變量賦初始值,保證后面程序的運行。程序開始運行,先對串口進行初始化,配置其波特率為115200,再對霍爾傳感器、磁耦隔離、ADC、LED、定時器和中斷進行配置,設置ADC 中斷的搶占優先級與響應優先級都為0,之后給電流環PID 參數和Id_ref、Iq_ref 賦初值,再把定時器使能打開,進入while(1)循環,在里面執行LED 燈閃爍,在程序運行的時候來判斷程序是否正常運行。其主函數的程序流程圖如圖7所示。
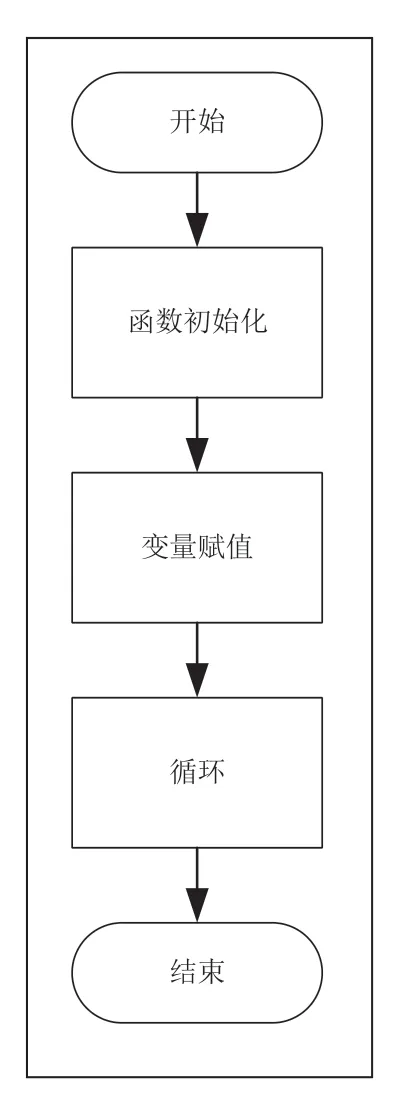
圖7 主函數程序流程圖
■3.2 中斷函數
中斷函數是該控制系統的主要部分,中斷函數為外部觸發中斷,主要包含了FOC 矢量控制算法所需變量的賦值與FOC矢量控制算法所需的各種變換。程序開始,判斷ADC 注入通道是否有上升沿觸發,當有上升沿觸發時進入中斷函數,否則,不進入中斷函數。進入中斷函數以后,采集電機的三相電流和電機的角度,通過CLARK 變換,將三相電流Ia、Ib、Ic轉化為兩相Iα、Iβ,對Iα、Iβ做Park 變換,得到Id、Iq,與Id_ref、Iq_ref 作差,經過PID 控制器使Id、Iq最終達到設置的Id_ref、Iq_ref,然后通過反park 變換把直流信息轉化為交流信息用于SVPWM 的輸入,最后通過SVPWM 計算驅動電機。中斷函數的程序流程圖如圖8 所示。
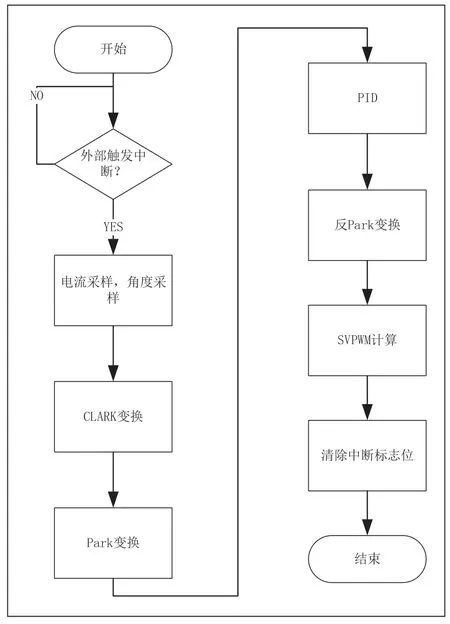
圖8 中斷流程圖
■3.3 控制算法
本永磁同步直線電機控制系統采用的是FOC 矢量控制算法,是目前永磁同步直線電機(PMLSM)高效控制的最優方法之一。
FOC 矢量控制算法結構框圖如圖9 所示。
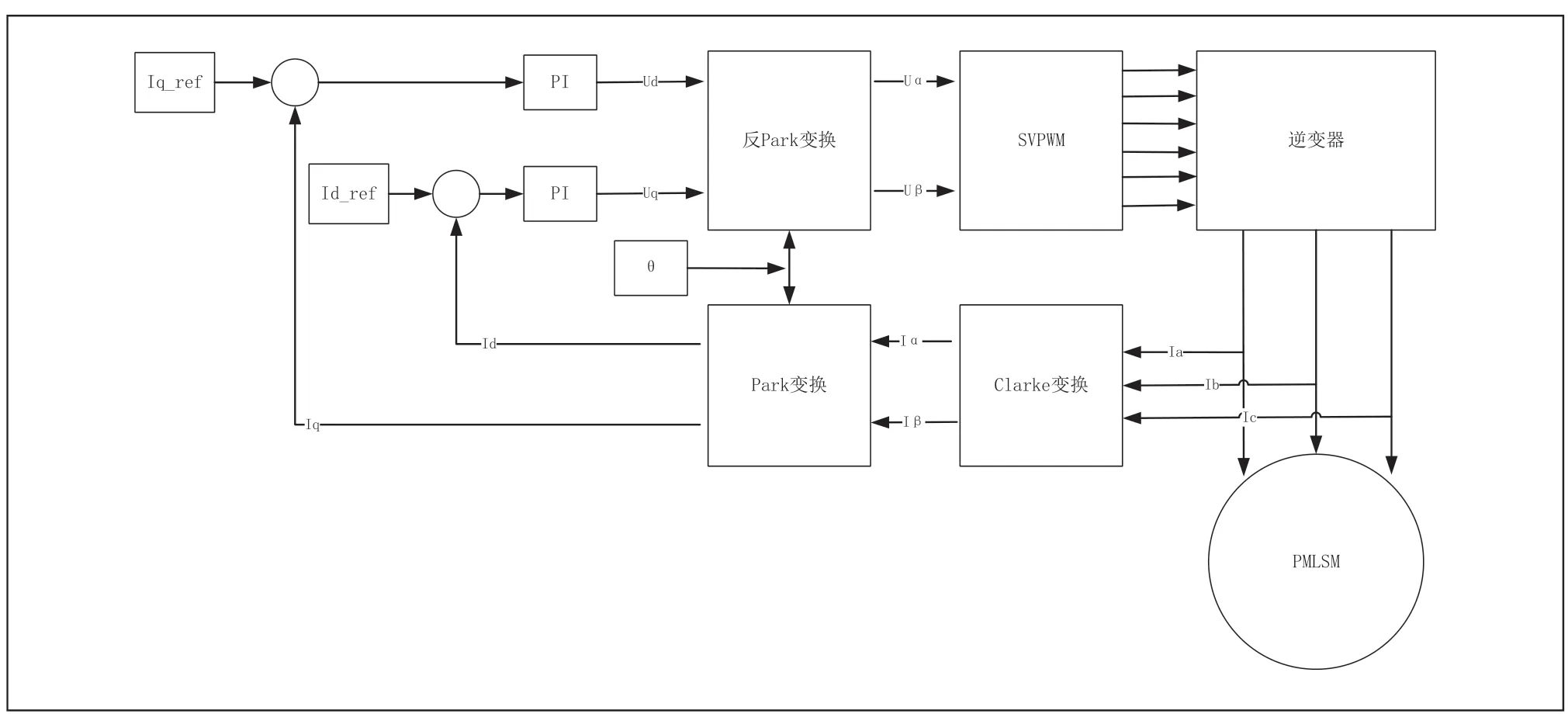
圖9 FOC 矢量控制算法結構框圖
首先,我們采集三相電流,在實際應用中,為了節約成本,我們采集兩相電流即可,第三相電流通過公式(3)基爾霍夫電流定律(KCL)來計算,該定律規定在任意時刻,流入一個節點的電流之和恒等于流出該節點的電流之和。基爾霍夫電流定律公式如下:
我們采集到的三相電流Ia、Ib、Ic基本上就是三個相位相差120 度的正弦波,經過Clarke 變換后將這三個非正交的基向量,正交化為一個直角坐標系,這個新的直角坐標系我們把它命名為α—β 坐標系。變換公式如下:
之后我們將Iα、Iβ進行線性化,我們通過作Clark 變換,將α-β 坐標系旋轉θ 度,其中θ 是轉子當前的角度。得到Id、Iq。Clark 變換公式如下:
Id、Iq為直流量,這時我們就可以采用控制直流電機的方式來控制永磁同步直線電機,我們采用的是工業界偏愛的PID 控制,這里我們只需要用PI 就可以滿足要求。
我們將反饋量Id、Iq與設定值Id_ref、Iq_ref 進行求差,輸入到PI 控制器中,得到Ud、Uq,再進行反Park 變換,得到兩個相位相差90°的正弦量Uα、Uβ。反Park變換公式如下:
最后,把得到的Uα、Uβ通過SVPWM 調制,生成SVPWM 信號控制逆變橋,來驅動永磁同步電機。這時,就完成了FOC 控制的整個流程。
4 實驗
最后,需要通過實驗來檢驗我們的硬件電路和控制程序是否正確。把設計的電機驅動電路板與永磁同步直線電機連接好,將程序通過下載器下載到電路板上,給電路板通上直流24V 電源,打開開關,驅動直線電機的運行。將示波器的探頭接到電路板驅動信號輸出端,監測電機驅動電路板輸出給電機的波形。波形如圖10 所示。
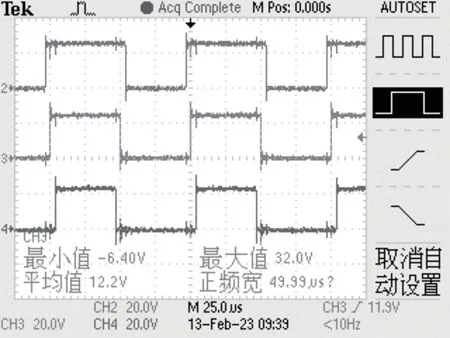
圖10 驅動信號波形圖
5 結論
本文針對自動門在實際應用中的需求,提出了一種新型的基于永磁同步直線電機的自動門控制系統,論述了該自動門控制系統的組成及其各部分的原理,設計并完成了永磁同步直線電機控制系統的硬件電路設計和控制軟件的編寫,對自動門控制系統未來的設計與開發使用具有一定的指導意義,提供了一定的參考價值。