新型四自由度并聯隔振系統的機構設計與分析
2023-12-04 05:38:42李亞晶岳義韋寶琛崔國華劉國興
機床與液壓 2023年21期
李亞晶,岳義,2 ,韋寶琛,2 ,崔國華 ,劉國興
(1.上海工程技術大學機械與汽車工程學院,上海 201620;2.上海交通大學機械與動力工程學院,上海 200240)
0 前言
救護車在行駛過程中會因路面不平而引起上下振動,因制動與啟動引起前后振動,因轉彎引起左右振動,即在x、y、z3個方向上振動[1]。這些振動通過車身傳遞到病人所在的擔架上,傷員會受到來自垂直、縱向、橫向的振動沖擊,不僅不能有效地保護傷員,還會對傷員造成二次傷害。研究表明:大約10%的傷員會在運輸的過程中出現病情惡化的現象[2]。針對此類問題,國內外研究機構和學者通過設計不同減振裝置解決。
并聯機構因具有承載高、剛度好、精度高、動態特性好等優點[3]而被廣泛應用于各個領域。如運動模擬器(飛行模擬器、娛樂模擬系統、汽車運行模擬器)、微操作機器人(醫療設備、微加工、生物工程)、航天對接器、并聯機床等。同樣,并聯機構在減振裝置中也有很大的應用,吸引了大批學者進行研究。如KARNOPP等[4]設計并研究了有關航空航天器的整星隔振系統;WANG等[5]提出了一種新型的微隔振Stewart平臺;朱偉等人[6]構建了以3-PUU并聯機構為主體結構的三平移減振平臺;楊啟志等[7]設計一種新型三自由度汽車并聯減振座椅;牛軍川、張福亮[8]針對3-PRC機構的不足,設計一種3-PRRP4R并聯機構,用來解決多維振動問題;羅敏等人[9]設計了一種“并聯隔振裝置”承載隔振一體化系統用來保證成像質量。
其中救護車減振裝置因對重癥傷員的保護作用而被重點研究。通過將擔架安裝在減振裝置上實現對不期望振動的降低或抑制,來削減救護車行駛過程中對病人造成的二次傷害。早在1990年張鐵硯、劉軍[10]就對輕型救護車減振擔架進行設計研究;同年黃永勇[11]對兩自由度減振擔架模型進行了平順性分析。近年來,SHINTANI等[12]提出了救護車病床二維基礎隔離裝置;徐新喜等[13]提出了采用小剛度彈簧并附加液壓阻尼器的阻尼減振方案用于救護車擔架;李駿等人[14]利用 MATLAB/Simulink建立九自由度救護車—擔架—臥位人體振動系統仿真模型,有效提高人體舒適度;高翔等人[15]對4-PUU并聯機構進行改進,有效隔離了沿坐標軸的平移振動以及繞X軸的旋轉振動;徐鴻佳等[16]基于3-RPS并聯機構對越野救護車車載平衡裝置進行分析,得出該機構在Z軸方向上的移動和繞X、Y軸的轉動有良好的輸出效果,在一定空間內具有較高的靈巧度,且奇異性非常低。上述研究雖然在多維減振方面有了一定成果,但并沒有考慮實際救護車尺寸以及裝置的安裝空間,導致目前救護車減振裝置不能應用在實際場景中。
為了隔離所有方向上的旋轉和移動,需要一種六自由度的隔振裝置。但在救護車設計過程中,考慮到需要在擁堵路段快速通過,對車身的寬度進行了壓縮,同時,車內需要醫護人員陪同,車內空間進一步降低,這使得減振裝置的尺寸要求嚴格。五自由度以及六自由度的裝置安裝空間存在著較大的問題。二自由度以及三自由度不能很好地改善擔架的振動影響,所以為了在有限空間內能盡可能地補償更多維度的振動,四自由度的并聯機構是一種較好的解決方法。空間四自由度是少自由度并聯機構中重要分支,已有不少學者對此進行了研究。馬履中等[17]基于船舶儀器設備的減振要求,提出具有冗余四自由度的并聯機構作為減振裝置;劉旭升等[18]提出一種四自由度廣義球面并聯機構來滿足踝關節康復運動需求;彭紅梅等[19]針對自動化生產線分揀需求,提出一種新型四自由度的三平移一轉動(3T1R)并聯機器人機構;盧月紅、徐彩蓮[20]提出一種可實現三平移一轉動的空間并聯機器人機構,并利用方位特征集理論分析機構的自由度和方位特征集;HAN等[21]提出一種用于高速場合的3T1R四自由度并聯機器人。目前,許多學者仍將空間四自由度機構的研究重心放在3T1R或者3R1T上面,2T2R的研究還相對缺乏。雖然2T2R四自由度并聯機構的運動效果更佳,但因為無法避免奇異位型的出現,這類機構的研究相對較少。
綜上所述,針對救護車在運載重癥傷員時因啟動、制動、轉彎與顛簸使車身發生垂直、前后、橫滾與俯仰4個自由度方向的振動問題,本文作者基于螺旋理論提出一種具有兩移兩轉(2T2R)運動特性的新型的2RRU-2UPS四自由度并聯隔振裝置。通過全雅克比對其奇異性進行分析,不改變其運動特性的條件下,在2個RRU支鏈上分別增加RPU支鏈構成混合支鏈用以避免奇異或者避免接近奇異,最終提出2-UPS-2-(RP-RR)U對稱并聯隔振裝置。基于螺旋理論對其連續轉軸進行分析,確定該機構的2條連續轉軸,驗證該機構運動的連續性。通過分析其結構特征,運用閉環矢量法建立運動學逆解模型,運用MATLAB軟件進行編程,驗證其運動模型的正確性,同時結合邊界搜索法仿真出該機構的工作空間,為設計者提供理論基礎。
1 四自由度隔振裝置機構設計
1.1 機構設計方法
在螺旋理論中,力螺旋與運動螺旋的互易積為零時互為反螺旋。并聯機構設計的核心是尋找運動支鏈,為平臺提供相應的運動與約束。對設計n個自由度的非冗余并聯機構來說,必須要滿足以下幾個條件:(1)運動平臺至少有n個自由度;(2)每一個支鏈的自由度個數必須大于等于n;(3)所有的支鏈自由度共同作用之后其和一定等于n;(4)每個分支的約束螺旋個數必須小于等于(6-n);(5)所有支鏈的約束螺旋共同作用之后,整個系統的約束螺旋一定為(6-n)。并聯機構動平臺的約束可以表示為
(1)

設計一款每個分支都相互對稱并且每個分支上所受到的約束也相同的機構十分困難。但如果單獨考慮并聯系統的所有分支,考慮4個特殊的子系統分布類型,設計過程將會被簡化。對于n自由度非冗余并聯機構,根據其約束的類型可分為兩大類:一類是分支機構中有6個運動螺旋沒有約束集;另一類是運動螺旋不足6個有約束集。如式(2)所示:
(2)
1.2 四自由度并聯機構設計
救護車的振動主要是由道路顛簸引起的垂直振動和救護車啟動與制動引起的前后振動,即在Z軸與X軸方向上的移動。同時為了保證患者的舒適度,救護車的傾斜也需要平衡,即在X軸以及Y軸上的轉動。所設計的救護車隔振裝置至少需要4個自由度運動,即X&Z平移自由度和X&Y旋轉自由度,如圖1所示。

圖1 隔振裝置的運動分析Fig.1 Motion analysis of vibration isolation device
根據螺旋理論當中的運動螺旋以及約束螺旋的關系,可以得到四自由度2R2T(2-旋轉-2-平移)移動平臺的運動螺旋系統。移動平臺的2個轉動2個移動運動螺旋(2-ξ0-2-ξ∞) 如圖2(a)所示,相應的約束螺旋如圖2(b)所示,包含了沿Y軸方向的力約束以及沿Z軸方向的力矩約束。ξ0、ξ∞、ζ0和ζ∞分別代表著轉動、移動、約束力和約束力矩。
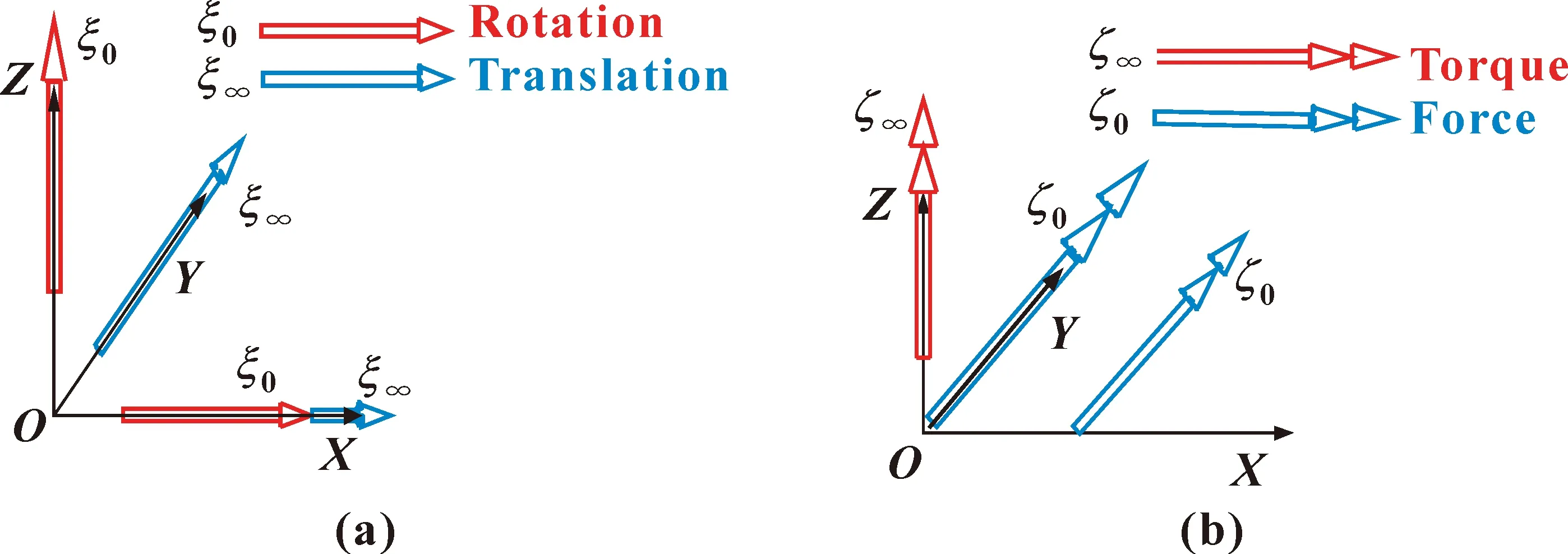
圖2 2R2T并聯機構的運動螺旋(a)和約束螺旋(b)Fig.2 Motion screw (a)and constraint screw (b)of 2R2T parallel mechanism
許多分支系統所呈現的運動是等效的,如一個約束力與一個約束力偶共同作用與兩個約束力共同作用所產生的約束是等價的。第一個約束螺旋系是由一個沿Y方向的約束力以及一個沿Z軸方向的約束力偶組成的。第二個是由沿Y軸方向的兩個約束力組成的,同時這兩個約束力所組成的平面要垂直于Z軸。
并聯機構分支中的約束螺旋包括1-ξ0、1-ξ∞、1-ξ0-1-ξ∞或者是沒有運動螺旋。根據螺旋理論當中約束螺旋與運動螺旋的關系,即當約束力與該分支所有轉動副軸線共面且與所有移動副軸線相互垂直時,兩者互為反螺旋;當約束力偶與該分支所有轉動副軸線相互垂直時,兩者互為反螺旋。
如圖3所示:只有一個約束力的支鏈應滿足:(1)所有的轉動副軸線都應平行于約束力;(2)所有的移動副都應垂直于約束力。如圖4所示,只有一個約束力偶的支鏈應滿足所有的轉動副垂直于約束力偶。如圖5所示,一個約束力與一個約束力偶共同作用的分支鏈應滿足:(1)所有的轉動副軸線都應平行于約束力;(2)所有的轉動副都應垂直于約束力偶;(3)所有的移動副都應垂直于約束力。

圖3 帶有一個約束力的分支Fig.3 Branch with a force constraint
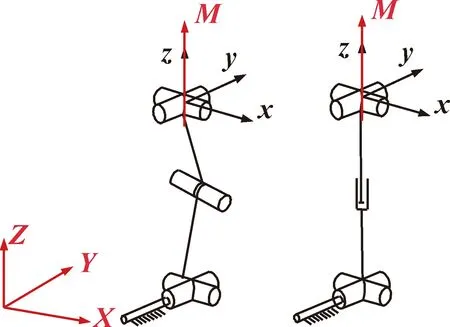
圖4 帶有一個約束力偶的分支Fig.4 Branch with a torque constraint
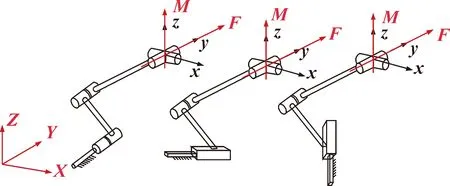
圖5 帶有一個約束力和一個約束力偶的分支Fig.5 Branch with a force constraint and a torque constraint
通過公式(2)對并聯機構分支類型進行選取。令公式(2)中的m=2,使得4個分支中的2個分支提供所有的約束,另外2個分支不提供約束。帶有約束螺旋的分支可以從1-ξ0、1-ξ∞、1-ξ0-1-ξ∞這3種分支中選擇,這些分支的約束螺旋共同作用后為1-ξ0-1-ξ∞或 2-ξ0的約束系。2R2T并聯機構中的其他2個不帶約束螺旋的分支可以選擇UPS鏈。2R2T并聯機構簡圖如圖6所示。
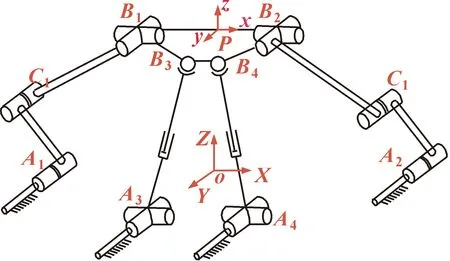
圖6 2RRU-2UPS機構簡圖Fig.6 2RRU-2UPS mechanism diagram
2 全雅可比矩陣奇異分析
2RRU-2UPS的結構簡圖如圖6所示。2個UPS支鏈中的移動副作為其驅動副(軸線位于AiBi之上),2個RRU支鏈中與機架相連的2個轉動副作為其驅動副(軸線位于Ai沿Y軸方向向上)。靜平臺(A1A2A3A4)位于靜坐標系O-XYZ當中,其原點位于A1A2中心處,動平臺(B1B2B3B4)位于動坐標系P-xyz當中,其原點位于B1B2中心處。
一個球關節相當于3個相交的非共面轉動關節,一個萬向節相當于2個相交的轉動關節。移動平臺的瞬時螺旋$p表達式如下:
(3)
式中:θj,i定義為速度;$j,i定義為第i條支鏈的第j個關節的單位螺旋;ci定義為每條支鏈的自由度個數;移動平臺的運動螺旋定義為$p=[ωTvT]T,其中ω是移動平臺的角速度,v是運動平臺中一點的線速度,它與表示螺旋的參考系的原點瞬間重合。
該機構的全雅可比[22]為
(4)
(5)
其中:bi=PBi;mi=BiCi;sj,i為第i條支鏈第j個關節的軸線方向。
Jc為該機構的約束雅可比,由支鏈所提供的約束螺旋構成,其表達式為
(6)
其中:ni為垂直于萬向鉸平面的單位約束力偶。
機構將會在以下幾種情況下發生奇異:(1)4個驅動約束力共面即動平臺與靜平臺重合;(2)4個驅動約束力在空間相交于一點;(3)2條RRU支鏈不在同一平面且不完全對稱;(4)4個驅動約束力兩兩相交的交點所形成的轉軸與動平臺Y軸平行。
機構不僅在奇異點處無法正常運行,同時其性能在奇異點的周邊空間極差。為避免機構奇異或接近奇異,并在有限空間內保證該機構具有高剛度、抗偏載能力強、運動響應快等性能,在2個RRU支鏈上分別增加RPU支鏈構成一個混合鏈,萬向鉸作為共用U副,如圖7所示;4個移動副作為機構的驅動副,其結構簡圖如圖8所示;三維模型如圖9所示。
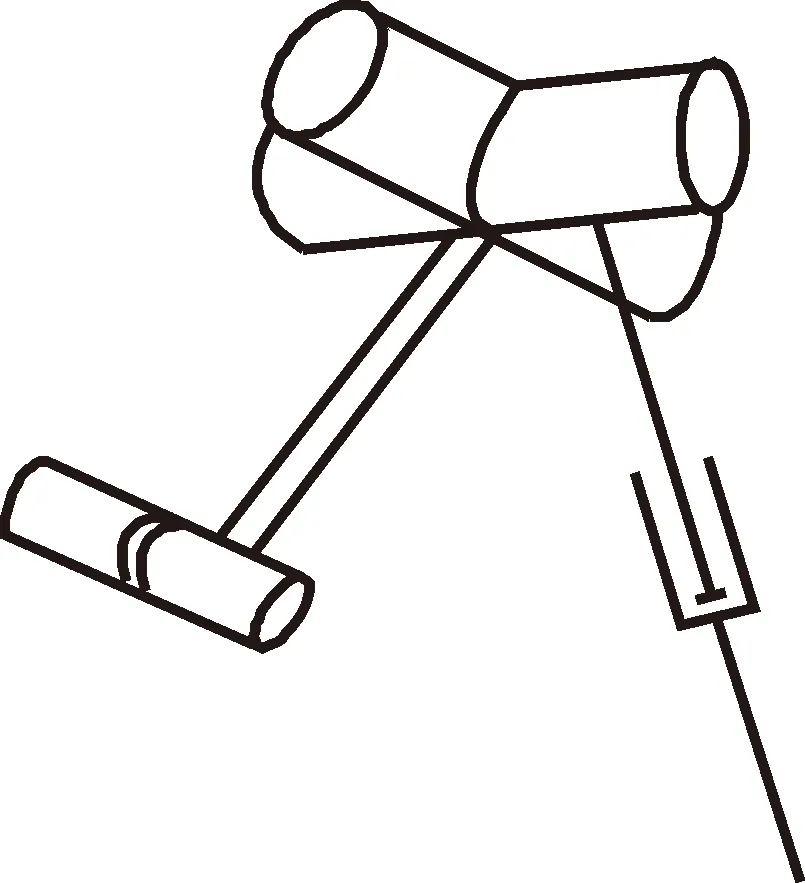
圖7 混合支鏈局部示意Fig.7 Partial schematic of mixed branching chain
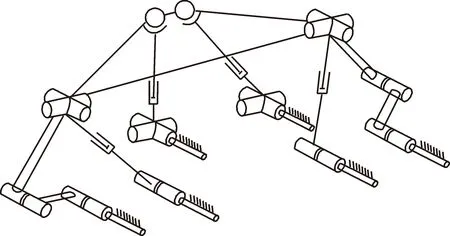
圖8 機構簡圖Fig.8 Mechanism diagram
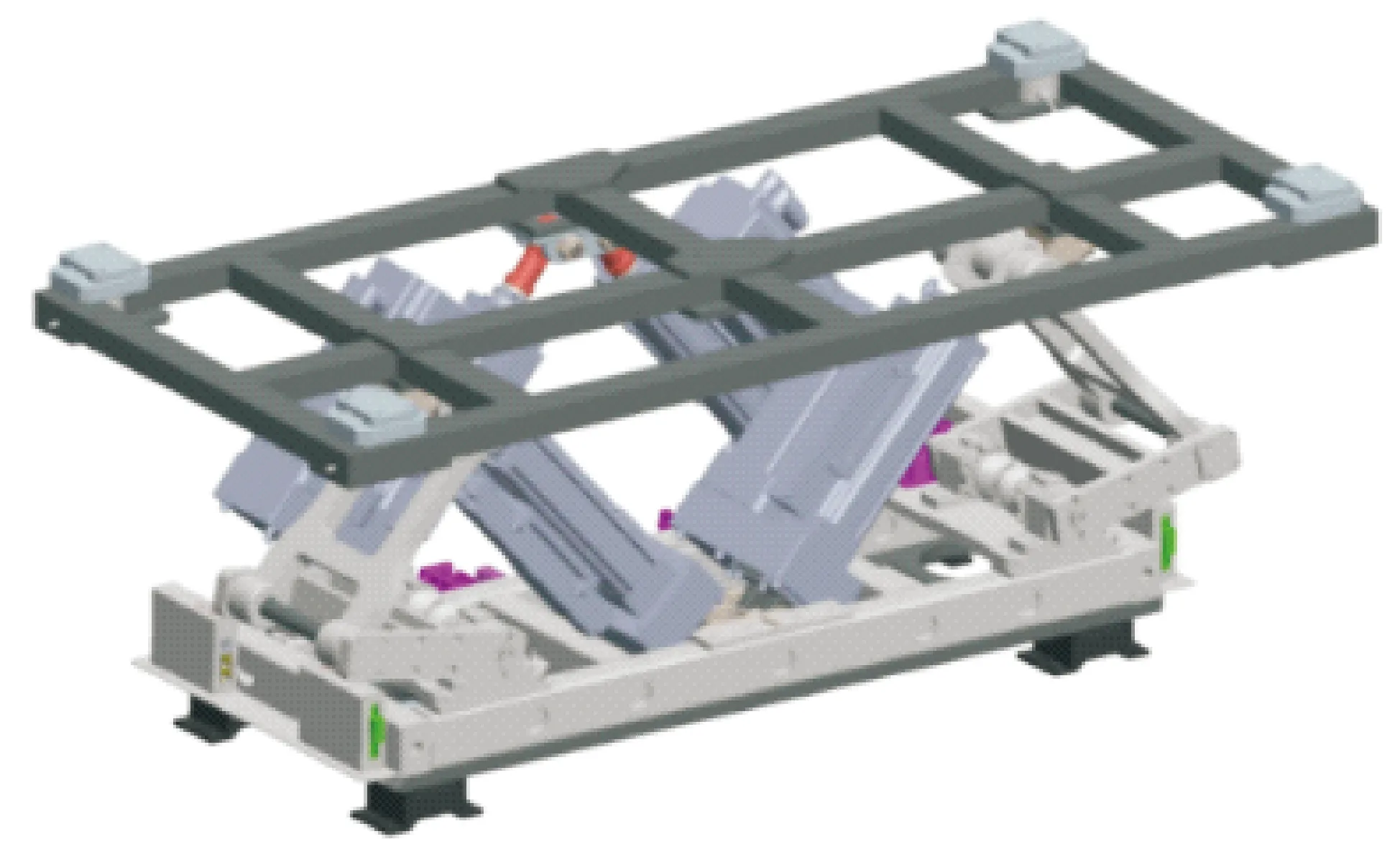
圖9 機構三維模型Fig.9 Mechanism 3D model
3 運動轉軸的連續性
3.1 自由度分析
基于螺旋理論對機構進行自由度分析,將移動副看作是節距為無窮大的偶量,將轉動副看作是節距為零的線矢量,使用修正的G-K公式對該機構進行自由度求解:
(7)
其中:d為機構的階;n為機構中包括機架總的活動構件的數目;g為運動副的數目;fi為第i個運動副的自由度數目;v為機構的過約束;ξ為機構的局部自由度。
式中,N為脈沖波形的總的采樣點,m為飽和點數,a為線性系數,c為修正偏移量.通過窗寬自適應形心修正算法對原始數據進行預處理濾波,并根據不同飽和度波形的飽和點獲得適應本波形的窗寬,進而以調整后的窗寬滑窗取樣,獲得窗寬W的數據x=[xa xa+1…xa+W]和y=[ya ya+1…ya+W],對獲得的波形數據求加權和并與前一次比較,在滑窗過程中獲得形心計算的起始位置xt
M=6×(14-16-1)+24+2-4=4
通過修正的G-K公式可以得到該機構的自由度為4,符合預先設定的動平臺自由度要求。
3.2 初始位形下連續轉軸分析
在初始位形下,在動平臺建立動坐標系P-xyz,在靜平臺建立靜坐標系O-XYZ。點Ai在靜坐標系中的坐標為(XAi,YAi,0),點Bi的坐標為(XBi,YBi,ZBi)。機構位形如圖10所示。
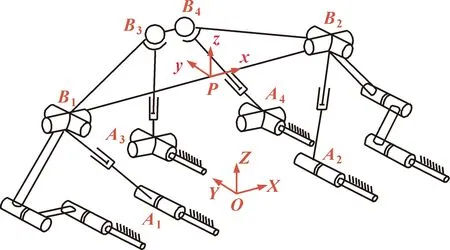
圖10 初始位形簡圖Fig.10 Initial configuration diagram
該機構的約束螺旋[23]為
(8)

4個分支對動平臺施加的2個約束螺旋構成平臺的約束螺旋系,對其求反螺旋可得:
(9)

3.3 繞B1B2桿連續轉動后的轉軸分析
機構繞B1B2桿連續轉動后的機構位形如圖11所示。
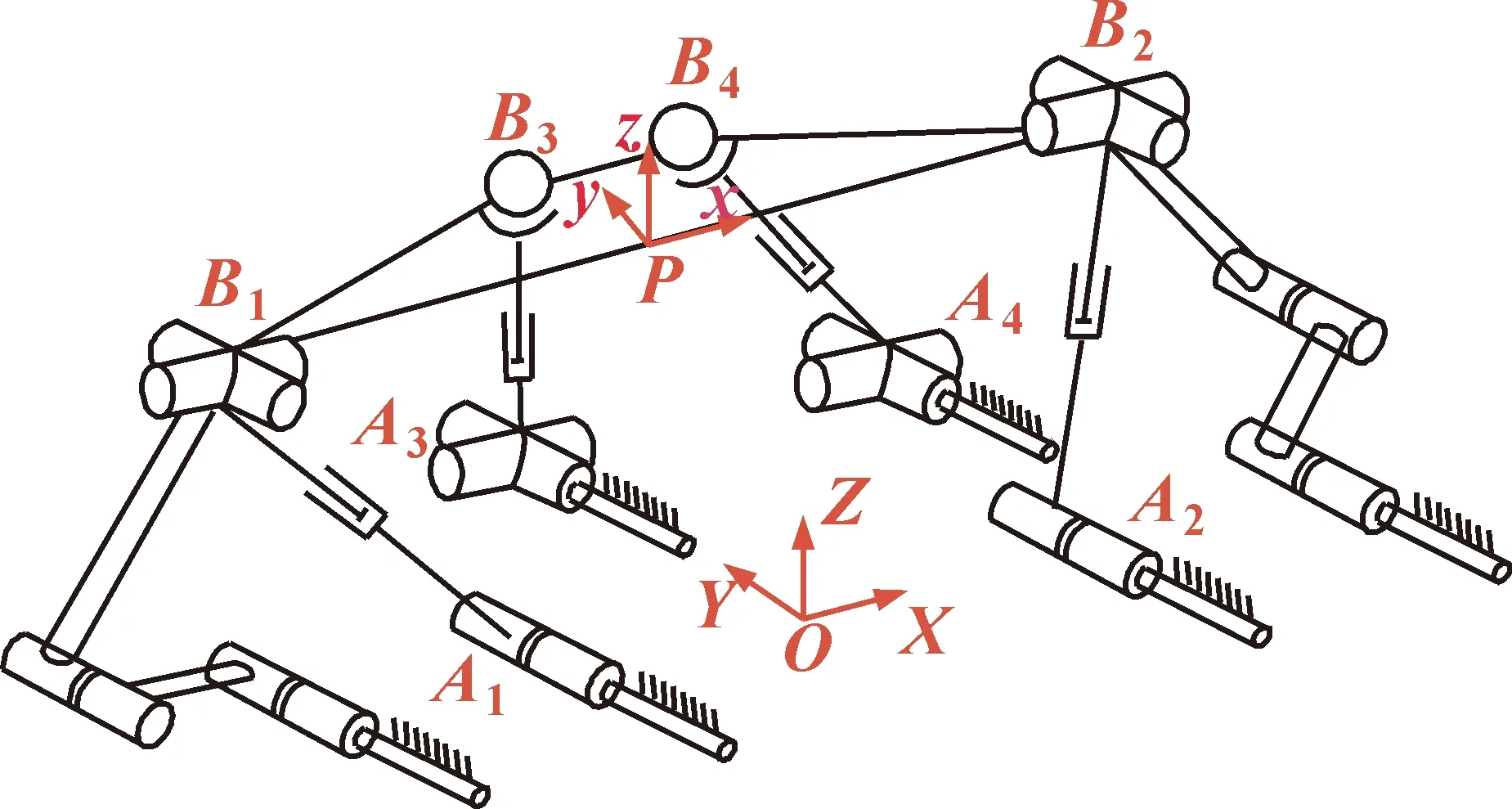
圖11 繞B1B2桿連續轉動后的機構簡圖Fig.11 Mechanism diagram after continuous rotation around the B1B2 rod
轉動后的機構約束螺旋為
(10)
4個分支對動平臺施加的2個約束螺旋構成平臺的約束螺旋系,對其求反螺旋可得
(11)
3.4 先繞Y軸再繞B1B2連續轉動后的轉軸分析
復合轉動后機構位形如圖12所示。
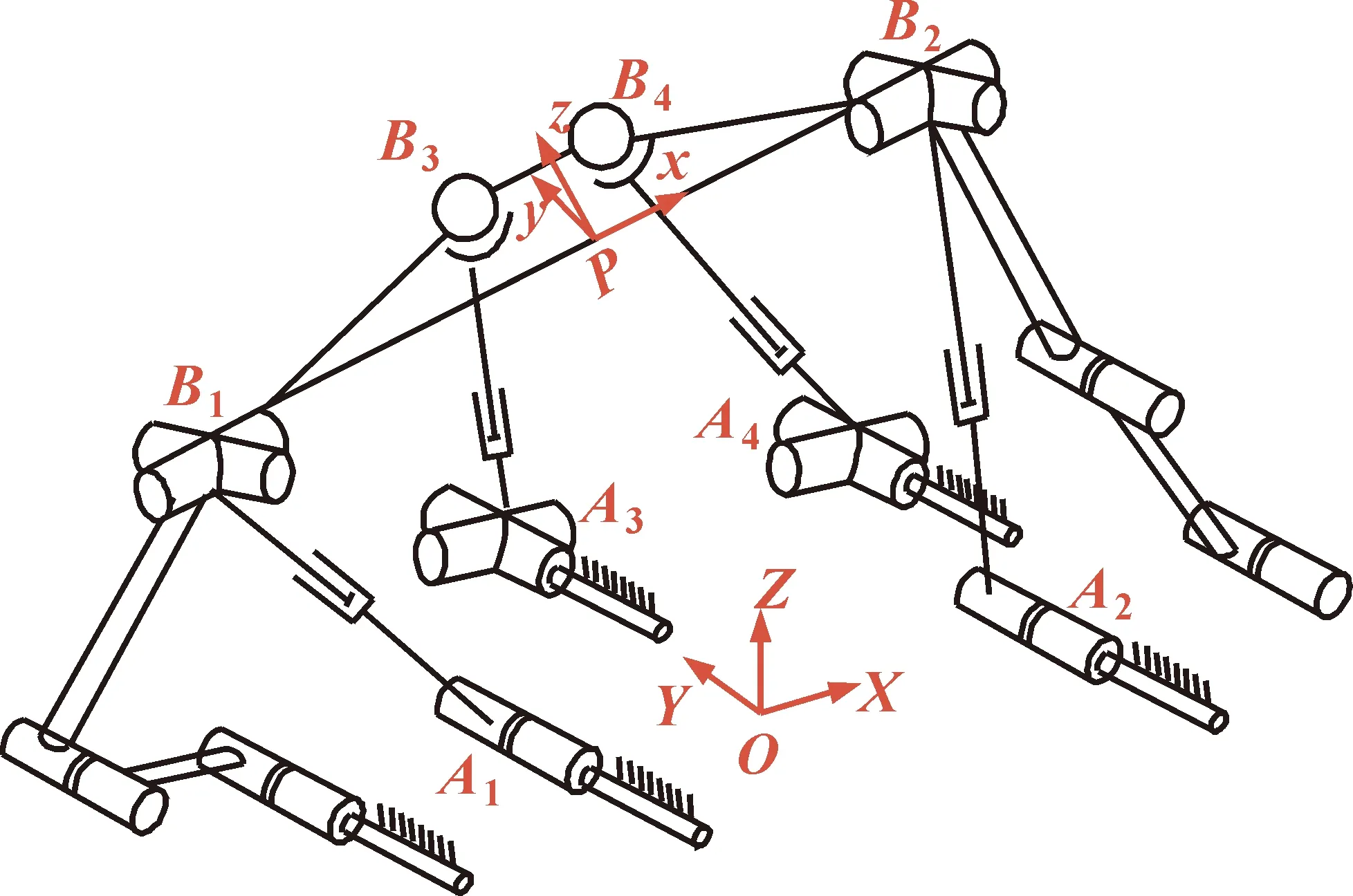
圖12 兩次轉動后的機構簡圖Fig.12 Mechanism diagram after two rotations
轉動后該機構的約束螺旋為
(12)
4個分支對動平臺施加的2個約束螺旋構成平臺的約束螺旋系,對其再次求反螺旋可得:
(13)
綜上所述,在動平臺連續轉動后仍可以繞B1B2桿與靜坐標系Y軸轉動,即B1B2桿與Y軸為該機構的2個連續轉軸。其中靜坐標系中的Y軸是該機構的固定轉軸,不隨動平臺的變化而變化,B1B2桿為任意轉軸,隨著動平臺的變化而變化。
4 運動學反解模型
求解2-UPS-2-(RP-RR)U并聯機構的運動學位置反解,即給定機構的尺寸參數、動平臺末端點x和z方向上的坐標以及動平臺的姿態(θx,θy),求4個驅動副的位移qi(i=1,2,3,4)。如圖10所示,在動平臺建立動坐標系P-xyz,在靜平臺建立靜坐標系O-XYZ。定義p為動坐標系原點相對于靜坐標系原點的位置矢量;定義ai為在靜坐標系下點Ai的位置矢量;定義bi為在動坐標系下點Bi的位置矢量;定義li為各個支鏈在靜坐標系中的位置矢量。
在該并聯機構中,θx、θy、θz分別為繞x、y、z軸的轉動角度,因為該機構沒有在z方向上的轉動,即θz=0,則動坐標系相對于靜坐標系的姿態可以表示為
R=Ryx(θy,θx)=Ry(θy)Rx(θx)
(14)
根據該機構的幾何特性可以得到以下的閉環方程:
p+Rbi=ai+li…(i=1,2,3,4)
(15)
解得支鏈在靜坐標系中的位置矢量li為
li=p+Rbi-ai…(i=1,2,3,4)
(16)
設機構位于初始位置時各個支鏈的長度為Li(i=1,2,3,4),可以得到各個支鏈的驅動輸入qi(i=1,2,3,4),如下所示:
(17)
若已知該機構末端在靜坐標系中的廣義位姿信息,可以通過上式求出各個支鏈的驅動輸入。上述公式為系統的運動學反解模型。
5 工作空間
機器人的工作空間是衡量機器人性能的重要指標。文中所述的2-UPS-2-(RP-RR)U對稱并聯隔振機構能實現在XOZ平面的二維移動以及繞X軸與Y軸的轉動。
現給定該機構的基本尺寸參數如表1所示。
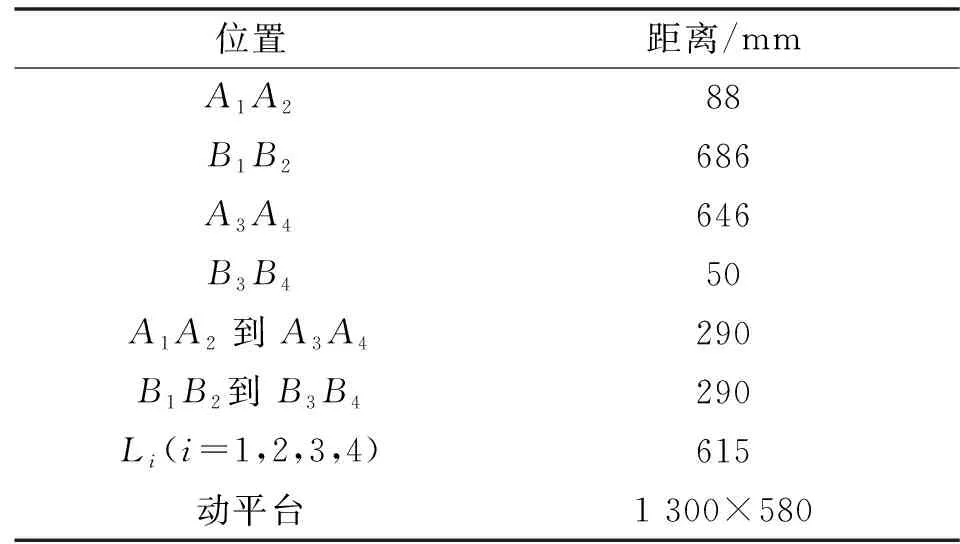
表1 參數尺寸Tab.1 Parameter size
在運動模型的基礎上,以運動反解算法為原型,結合邊界搜索法在MATLAB仿真軟件中編寫工作空間算法,給定桿長范圍(450~730 mm)并通過隨機選取未知參數來獲得參考點p可達到的所有點,即2-UPS-2-(RP-RR)U并聯機構的工作空間。仿真結果如圖13所示。
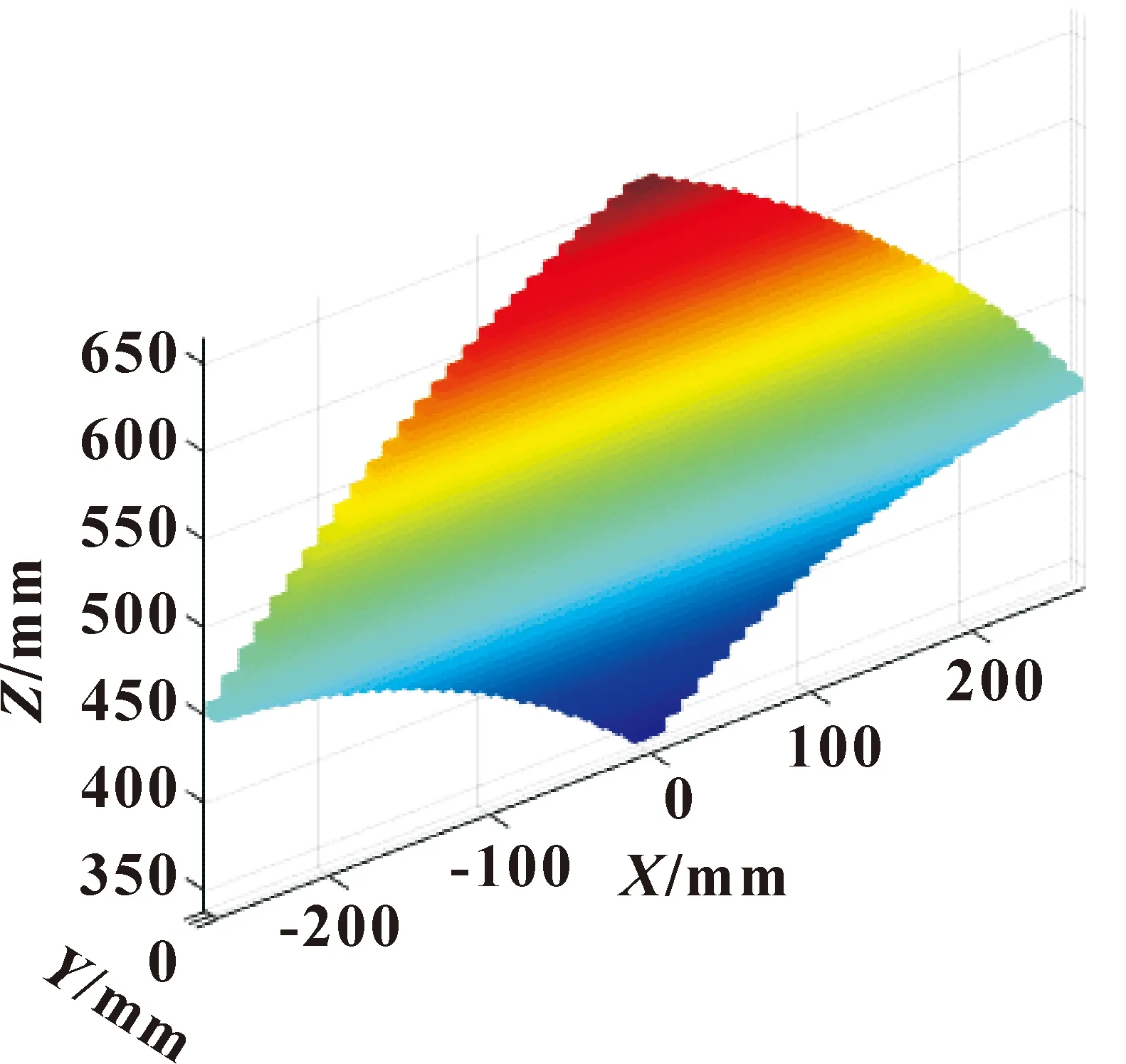
圖13 工作空間Fig.13 Workspace
由圖13可知:該新型2-UPS-2-(RP-RR)U對稱并聯隔振機構的工作空間關于X=0對稱。結合該機構采用關于YOZ平面完全對稱布置這一結構特點,該工作空間符合機構的理論分析與實際運動狀況。
6 結論
(1)提出了一種新型的2-UPS-2-(RP-RR)U對稱并聯隔振裝置,該機構具有2個轉動自由度和2個移動自由度,具有承載能力高、動態特性好等優點。
(2)通過全雅可比矩陣對其奇異性進行分析,采用2-(RP-RR)U混合支鏈代替2-RRU支鏈,在不改變其運動特性的情況下避免了奇異位形的出現。
(3)確定了該機構的兩條連續轉軸,分別為過靜坐標系原點且沿Y軸方向的固定轉軸與過動平臺兩U副中心點的任意轉軸,驗證了該機構運動的連續性。
(4)采用封閉矢量法建立了運動學逆解模型,結合邊界搜索法在MATLAB中仿真出的工作空間,驗證了運動學模型的正確性。