基于虛擬現(xiàn)實技術的低質(zhì)量船舶三維圖像重建
2023-12-04 06:38:12周雷
艦船科學技術 2023年20期
周 雷
(河南工程學院,河南 鄭州 451191)
0 引言
船舶圖像在成像后,三維信息轉換為二維信息[1],將導致部分船舶目標三維數(shù)據(jù)丟失[2],對船舶圖像應用產(chǎn)生消極影響。為獲取船舶目標的三維數(shù)據(jù),提升圖像應用性能,需對船舶圖像實施三維重建。
石磊等[3]研究圖像三維重構問題過程中,對圖像實施奇異值分解字典訓練,通過稀疏度自適應正則化校正匹配算法重建圖像。該方法匹配過程消耗大量時間,不能保障圖像重建的實時性要求。姚程等[4]針對圖像三維重構問題,構建基于八叉樹的卷積神經(jīng)網(wǎng)絡,將平面補丁發(fā)現(xiàn)與位移作為輸入,輸出重構結果。該方法實際應用過程中有較大概率出現(xiàn)圖像信息丟失問題。針對上述問題,提出基于虛擬現(xiàn)實技術的低質(zhì)量船舶三維圖像重建方法,從而獲取高質(zhì)量重建結果。
1 低質(zhì)量船舶三維圖像重建方法
1.1 基于虛擬現(xiàn)實技術的低質(zhì)量船舶圖像預處理
由于船舶三維圖像在采集過程中受外界環(huán)境因素與采集設備因素等影響,導致所采集的船舶圖像質(zhì)量較低,因此在進行三維圖像重建前,需采用虛擬現(xiàn)實技術中的形態(tài)學濾波技術對所采集的船舶三維圖像實施增強處理,提升最終圖像重建精度。f(i,j)和g(i,j)分別表示大小為m×n的船舶圖像和其結構元素,采用虛擬現(xiàn)實技術中的形態(tài)學濾波技術對f(i,j)實施處理。
利用式(1)進行膨脹運算:
式中,⊕表示膨脹運算。
利用式(2)進行腐蝕運算:
式中,Θ表示腐蝕運算,x∈(0,m],y∈(0,n]。
利用式(3)進行開啟與閉合運算:
通過開啟處理過程能夠濾除船舶圖像內(nèi)孤立的毛刺[5],能夠顯著抑制比結構元素小的正峰值噪聲。由宏觀角度分析可知,通過開啟運算可在保障船舶圖像尺寸固定的條件下對其進行平滑處理,但在船舶圖像鄰域像素灰度值噪聲點分布較為密集,同時結構元素尺寸與噪聲點距離相比顯著提升的條件下,開啟運算對于船舶圖像增強的效果顯著降低。而閉合運算能夠有效填充船舶圖像目標間狹小裂縫,實現(xiàn)臨近目標物的連接[6],但在噪聲點灰度值高于鄰域像素、同時密度值較大的條件下,閉合運算的濾波處理效果也有所下降。針對這些問題,可對開啟與閉合處理過程實施串聯(lián),構建數(shù)學形態(tài)學開啟—閉合濾波器,其結構如圖1 所示。數(shù)學形態(tài)學開啟—閉合濾波器內(nèi)的圖像融合是為了最大限度結合開啟與閉合運算的優(yōu)勢,經(jīng)由兩類濾波結果最大限度融合的過程能夠提升船舶圖像濾波效果,實現(xiàn)低質(zhì)量船舶圖像的增強處理。
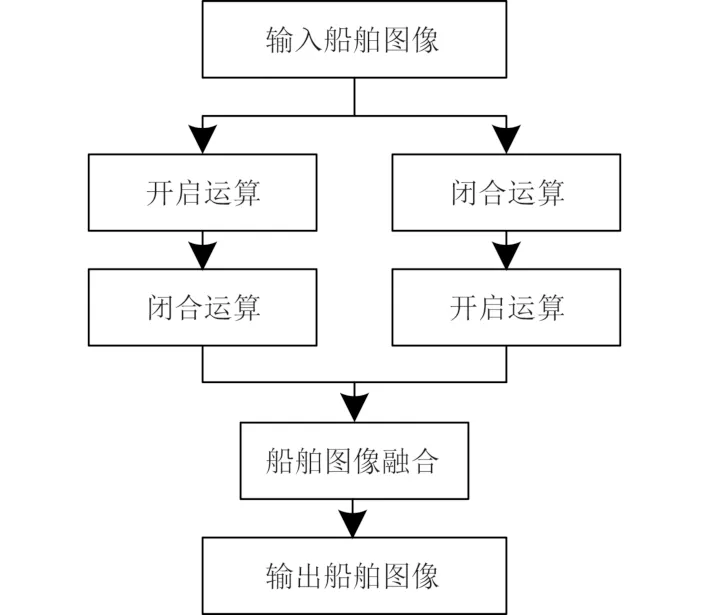
圖1 數(shù)學形態(tài)學開啟—閉合濾波器結構圖Fig.1 Mathematical morphology opening closing filter structure diagram
1.2 基于指數(shù)權重系數(shù)的船舶圖像特征提取
在完成低質(zhì)量船舶圖像增強處理后,對其實施三維圖像重建。船舶三維圖像重建過程中,需確定重構前后船舶圖像的對應關系。將增強處理后的船舶圖像內(nèi)特征點作為不變信息,通過特征描述保障重構過程中的信息完整性[7]。根據(jù)增強處理后船舶圖像的點云信息構建包含全部點云的元網(wǎng)格,確定不同網(wǎng)格中點云數(shù)據(jù)的均值。匯集全部組成的集合以H表示,也就是增強處理后的船舶三維點云圖像。針對H,可利用式(4)描述特征描述點Af算子:
式中:n和xn分別表示描述船舶圖像特征算子維度與特征描述信息,xn中主要包含船舶圖像中的幾何、紋理與亮度等信息。對待實施特征描述的船舶圖像點云數(shù)據(jù)區(qū)域實施加權求和處理,即可獲取此區(qū)域的特征矢量描述符。
1.3 基于虛擬現(xiàn)實技術的船舶圖像三維重建
采用虛擬現(xiàn)實技術獲取船舶圖像最小識別距離,基于所確定的船舶圖像特征,實現(xiàn)各三維點云的高精度匹配,在此基礎上達到船舶三維圖像重建。設定通過虛擬現(xiàn)實設備獲取的三維虛擬船舶均為點光源,不同點光源將形成艾里斑,若任意艾里斑邊緣零點與其與艾里斑的中心產(chǎn)生重疊,則可通過虛擬現(xiàn)實設備能分辨的最遠距離表示不同艾里斑的間距,公式為:
式中:l和D分別表示三維船舶與虛擬現(xiàn)實設備的間距和光通直徑,?表示光攝入虛擬現(xiàn)實設備的波長。
通過式(5)得到,光波同虛擬現(xiàn)實設備內(nèi)光學部分可識別的最大距離呈正比例相關。
利用式(6)能夠描述虛擬現(xiàn)實技術下三維船舶圖像重建過程:
式中:f(o+1)和f(o)分別表示重建后和重建前的船舶三維圖像,σo和V分別表示重建過程中的松弛因子和N階船舶圖像的正定矩陣,W和p分別表示M階船舶圖像的正定矩陣和船舶圖像特征提取迭代過程。
圖2 為船舶三維圖像重建過程,具體步驟如下:
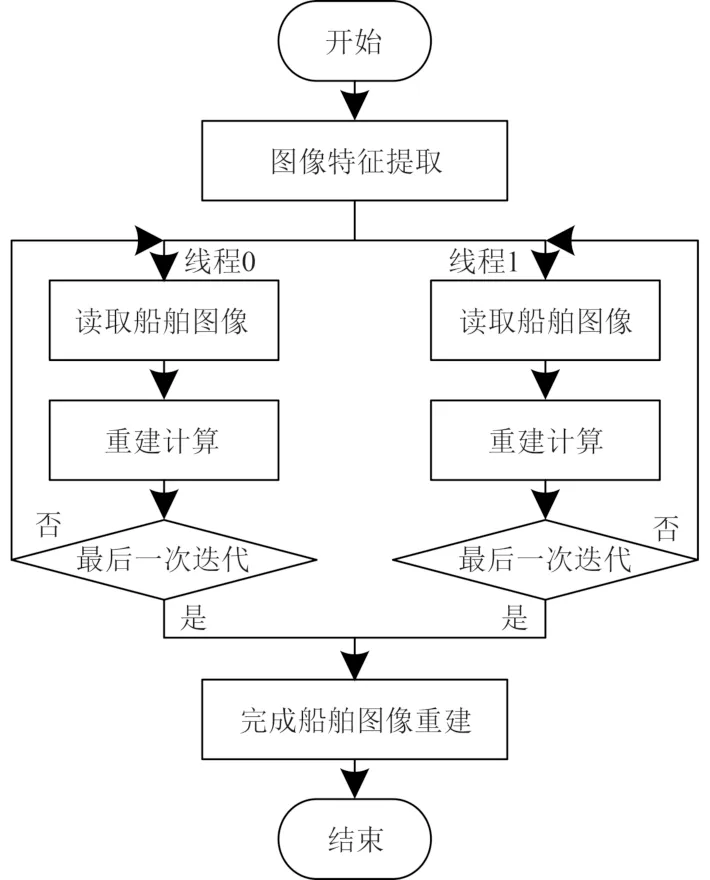
圖2 船舶三維圖像重建過程流程圖Fig.2 Flow chart of ship 3D image reconstruction process
步驟1確定某個投影角度下的投射射線i,利用帶重建船舶圖像的初始值得到第i條投影射線的投影
步驟2獲取船舶三維圖像投影值與實際測量的投影值的差值,確定理論船舶圖像投影值與實際投影值間的差值,公式為:
步驟3保存所獲取的 ?i值。
步驟4估算任意投影角度下第i+1條射線投影值,循環(huán)步驟1~步驟3,直到完全糾正所有射線偏差為止。
步驟5通過步驟4 獲取的偏差值修改重建后船舶圖像像素值。
針對其余投影角度,循環(huán)進行上述操作過程,直到所有角度下的船舶重建圖像校準完成為止,通過船舶重建圖像的Q次迭代實現(xiàn)高質(zhì)量的船舶三維圖像重建。
2 實驗結果與分析
選取某大型船舶圖像構建圖像集,采用本文方法對船舶圖像進行三維圖像重建實驗。
2.1 圖像處理性能測試
為驗證本文方法的圖像增強效果,在圖像集內(nèi)隨機選取2 幅圖像作為研究對象,在研究對象中加入20%的隨機噪聲,采用本文方法對其進行增強處理,結果如圖3 所示。分析可知,采用本文方法能夠有效實現(xiàn)研究對象的增強處理,通過增強處理后的圖像能夠準確識別船舶目標的輪廓信息,令船舶目標完全由噪聲中恢復出來,整體上提升了圖像的清晰度,最大程度接近初始圖像。

圖3 本文方法圖像增強效果Fig.3 Image enhancement effect of the method in this article
為客觀分析本文方法的圖像增強效果,以峰值信噪比為增強效果的評價指標,峰值信噪比值越大說明本文方法圖像增強效果越好。表1 為本文方法增強處理后的圖像峰值信噪比。分析可知,采用本文方法對研究對象進行增強處理,在不同噪聲密度條件下,峰值信噪比均呈現(xiàn)不同程度的提升,提升幅度在14%以上,由此說明采用本文方法的圖像增強效果較好。
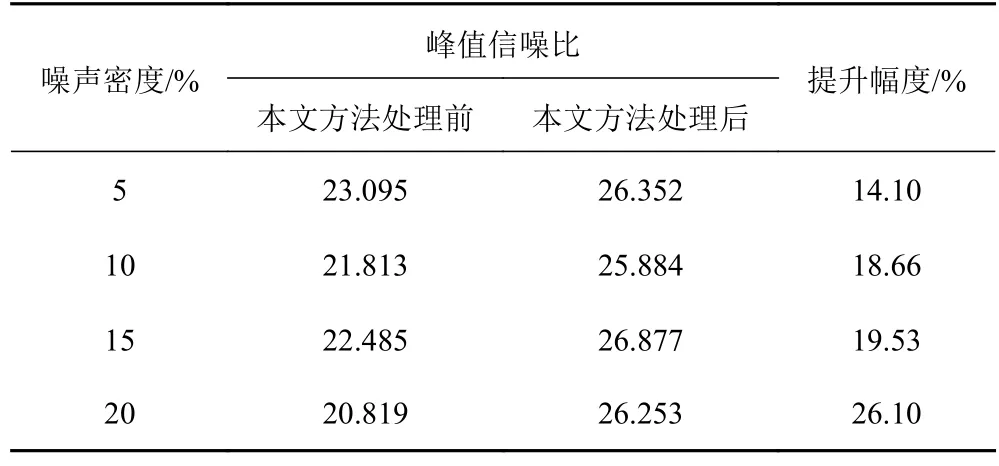
表1 本文方法增強后的峰值信噪比Tab.1 Peak signal-to-noise ratio after the method enhancement in this article
2.2 三維圖像重建性能分析
在圖像集內(nèi)選取不同結構復雜度的圖像,采用本文方法對其進行重構,以均方誤差與結構相似性2 個指標為評估指標,驗證本文方法的圖像重建性能,結果如表2 所示。分析可知,隨著目標結構復雜度的提升,本文方法重構結果的均方誤差整體表現(xiàn)出逐漸提升的趨勢,而結構相似性表現(xiàn)為逐漸下降的趨勢。但在目標結構復雜度達到0.80 時,本文方法重建結果的均方誤差低于0.27,而結構相似度達到95%,由此說明本文方法重建性能較好,更接近理想狀態(tài)。
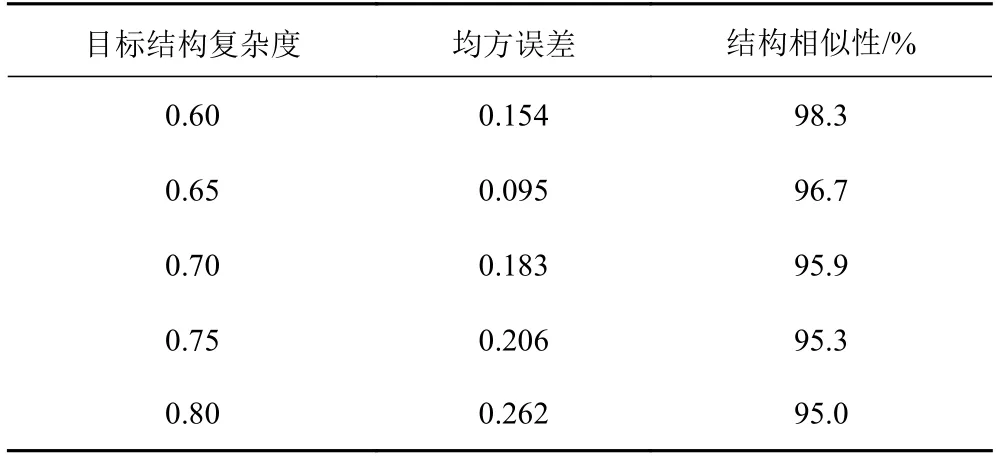
表2 本文方法重建圖像的均方誤差與結構相似性Tab.2 Mean square error and structural similarity of reconstructed images using this method
在圖像集內(nèi)選取6 幅分辨率為1 025×769 的船舶圖像,采用本文方法對其進行三維重建,對比重建前后的圖像分辨率,由此驗證本文方法的重建性能,結果如表3 所示。分析可知,采用本文方法對所選圖像實施重建后,圖像的分辨率提升至1 280×960,由此說明本文方法能夠在準確提取圖像特征的基礎上提升圖像清晰度。
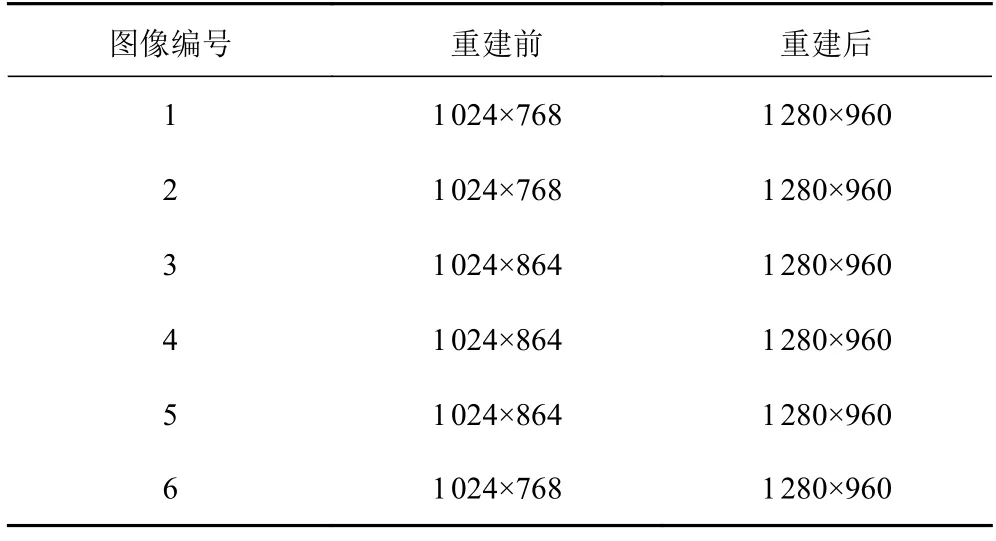
表3 圖像重建前后的分辨率對比結果Tab.3 Resolution comparison results before and after image reconstruction
3 結語
本文提出了基于虛擬現(xiàn)實技術的低質(zhì)量船舶三維圖像重建方法,采用虛擬現(xiàn)實技術中的濾波技術與虛擬現(xiàn)實設備實現(xiàn)三維圖像重建的目的。實驗結果表明,本文方法能夠有效實現(xiàn)圖像增強目的,達到高精度圖像重建的目的。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國船檢(2017年3期)2017-05-18 11:33:09
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
