海面GNSS-R 模型與時(shí)延-多普勒特征研究
2023-12-01 11:08:16萬林鈺楊鵬舉吳瑞曹新亮任新成
全球定位系統(tǒng) 2023年5期
萬林鈺,楊鵬舉,吳瑞,曹新亮,任新成
( 延安大學(xué)物理與電子信息學(xué)院, 陜西 延安 716000 )
0 引言
全球?qū)Ш叫l(wèi)星系統(tǒng)反射測(cè)量(Global Navigation Satellite System-Reflectometry,GNSS-R)是一種無源遙感技術(shù),于1978 年被首次提出.該技術(shù)利用衛(wèi)星導(dǎo)航的反射信號(hào)進(jìn)行遙感,在風(fēng)速反演[1]、海面測(cè)高[2]和海面溢油探測(cè)[3]等海洋遙感領(lǐng)域具有重要的研究意義和廣闊的應(yīng)用前景.
自上世紀(jì)90 年代中期GPS 得到廣泛應(yīng)用以來,人們開始關(guān)注并深入研究GNSS-R 在海洋遙感領(lǐng)域的應(yīng)用.1988 年,Hall 等[4]首次提出了利用地球表面反射的GNSS 信號(hào)進(jìn)行散射測(cè)量的想法.1993 年,Martin-Neira[5]第一次提出了PARIS 的概念,以利用GNSS 反射信號(hào)進(jìn)行海洋測(cè)高.1998 年,Garrison等[6]首次在機(jī)載實(shí)驗(yàn)中證明可利用GPS 反射信號(hào)進(jìn)行風(fēng)速測(cè)量.2002 年,Lowe 等[7]首次在星載高度觀測(cè)到GNSS 反射信號(hào).2005 年,Gleason 等[8]在UK-DMC衛(wèi)星上檢測(cè)到GPS 海洋反射信號(hào),表明利用近地軌道的雙基GNSS 反射信號(hào)進(jìn)行海洋遙感是可行的.
相較于國外,國內(nèi)在GNSS-R 技術(shù)領(lǐng)域的研究起步較晚,但取得了顯著進(jìn)展.2006 年,北京航空航天大學(xué)率先開展了利用GPS 信號(hào)進(jìn)行海面風(fēng)場(chǎng)探測(cè)的研究[9],并成功研制出GNSS-R 接收機(jī)[10].近幾年,北京航空航天大學(xué)在GNSS 反射信號(hào)建模及遙感應(yīng)用方面進(jìn)行了大量的研究[11-13].
中國礦業(yè)大學(xué)構(gòu)建了星載GNSS-R 海浪有效波高的反演模型[14].武漢大學(xué)利用改進(jìn)的星載GNSS-R卷積神經(jīng)網(wǎng)絡(luò)進(jìn)行海冰探測(cè)研究[15].
近年來,各國相繼發(fā)射GNSS-R 接收衛(wèi)星,為GNSS-R 技術(shù)在海洋領(lǐng)域的應(yīng)用提供了大量實(shí)測(cè)數(shù)據(jù)資源.2014 年,英國薩里衛(wèi)星技術(shù)公司發(fā)射了TechDemoSat-1(TDS-1)衛(wèi)星,搭載GNSS-R 遙感儀器,以完成星載GNSS-R 測(cè)量的任務(wù)[16].NASA 于2016 年啟動(dòng)了旋風(fēng)全球衛(wèi)星導(dǎo)航系統(tǒng)(Cyclone Global Navigation Satellite System,CYGNSS)任務(wù)[17],旨在監(jiān)測(cè)颶風(fēng)變化和熱帶氣旋.歐洲航天局和西班牙國家研究委員會(huì)也在這一領(lǐng)域積極展開研究.2019 年,中國自主研制的捕風(fēng)一號(hào)A/B 星發(fā)射成功,實(shí)現(xiàn)了利用衛(wèi)星導(dǎo)航信號(hào)進(jìn)行海面風(fēng)場(chǎng)探測(cè)的突破,對(duì)臺(tái)風(fēng)預(yù)警和防災(zāi)減災(zāi)具有重要意義[18].隨著我國自主研制的北斗衛(wèi)星導(dǎo)航系統(tǒng)(BeiDou Navigation Satellite System,BDS)[19]正式開通運(yùn)行,利用北斗衛(wèi)星反射信號(hào)進(jìn)行海洋遙感的應(yīng)用也越來越多[20-21].
對(duì)GNSS 反射信號(hào)建模與仿真分析是開展GNSS-R遙感應(yīng)用研究的重要基礎(chǔ).本文首先分析了GNSS 海面散射的幾何模型和GNSS 信號(hào)的結(jié)構(gòu),然后建立了GNSS 反射信號(hào)模型,利用經(jīng)典Z-V 模型研究了海面反射信號(hào)的時(shí)延一維相關(guān)功率和時(shí)延-多普勒二維相關(guān)功率譜特征,討論了時(shí)延間隔和多普勒頻移間隔分別對(duì)時(shí)延一維相關(guān)功率和時(shí)延-多普勒?qǐng)D(delay-Doppler map,DDM)波形的影響.
1 GNSS-R 幾何模型與信號(hào)結(jié)構(gòu)
1.1 GNSS-R 幾何模型
GNSS 衛(wèi)星、海面與接收機(jī)的雙基雷達(dá)幾何模型如圖1 所示.對(duì)于本文中的海面散射問題,使用了固定在反射面上的局部散射坐標(biāo)系.原點(diǎn)設(shè)置在鏡面反射點(diǎn)處,z軸位于局部水平面的法線方向.y、o、z平面包括GNSS 衛(wèi)星、接收機(jī)和鏡面反射點(diǎn),正y軸朝向GNSS 衛(wèi)星,x軸由右手正交法則可得.
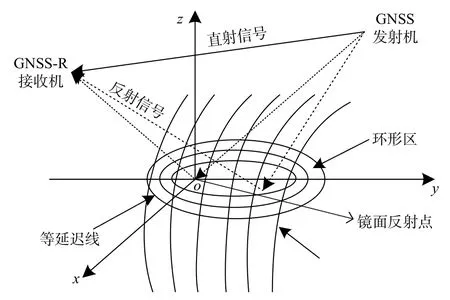
圖1 GNSS-R 幾何模型圖
GNSS 衛(wèi)星發(fā)射的信號(hào)經(jīng)由兩條路徑到達(dá)信號(hào)接收機(jī),一是從GNSS 衛(wèi)星直接到接收機(jī),信號(hào)中間傳播過程的衰減忽略不計(jì);二是GNSS 衛(wèi)星到海面再到信號(hào)接收機(jī),散射信號(hào)與直射信號(hào)相比,在時(shí)延和多普勒兩個(gè)維度上均有差異.GNSS 衛(wèi)星信號(hào)兩種到達(dá)接收機(jī)的方式,如圖1 所示.
1.2 GNSS 信號(hào)結(jié)構(gòu)
以BDS B1I 信號(hào)為例對(duì)GNSS 信號(hào)結(jié)構(gòu)進(jìn)行說明.BDS B1I 信號(hào)與其他GNSS 發(fā)射的信號(hào)如GPS L1 信號(hào)、Galileo E1 信號(hào)和GLONASS L1 信號(hào)具有相似的特點(diǎn)和相近的調(diào)制方式.B1I 信號(hào)在北斗二號(hào)(BeiDou-2Navigation Satellite System,BDS-2)和北斗三號(hào)(BeiDou-3Navigation Satellite System,BDS-3)系統(tǒng)的中圓地球軌道(medium earth orbit,MEO)衛(wèi)星、傾斜地球同步軌道(inclined geo-synchronous orbit,IGSO)衛(wèi)星和地球靜止軌道(geostationary earth orbit,GEO)衛(wèi)星上播發(fā),提供公開服務(wù)[22].
BDS B1I 信號(hào)由“測(cè)距碼+導(dǎo)航電文”調(diào)制在頻率為1561.098MHz 的載波上構(gòu)成,其信號(hào)表達(dá)式為
式中:上角標(biāo)i為北斗衛(wèi)星編號(hào);AB1I為信號(hào)振幅;CB1I為信號(hào)測(cè)距碼;DB1I為導(dǎo)航電文;f為B1I 信號(hào)的載波頻率;φB1I為信號(hào)初始相位.
BDS B1I 信號(hào)測(cè)距碼類似于GPS 信號(hào)中的擴(kuò)頻碼.測(cè)距碼稱為偽隨機(jī)噪聲(pseudo random noise code,PRN)序列,具有確定、周期性和良好的相關(guān)特性,BDS 優(yōu)先使用1~37 號(hào)測(cè)距碼.圖2 給出了BDS 4 號(hào)衛(wèi)星測(cè)距碼的自相關(guān)函數(shù).圖3 給出了BDS4 號(hào)和10 號(hào)衛(wèi)星測(cè)距碼的互相關(guān)函數(shù).圖2 和圖3說明了BDS B1I 信號(hào)測(cè)距碼具有良好的自相關(guān)和互相關(guān)特性,高自相關(guān)峰值和低互相關(guān)峰值可為信號(hào)捕獲提供很寬的動(dòng)態(tài)范圍.
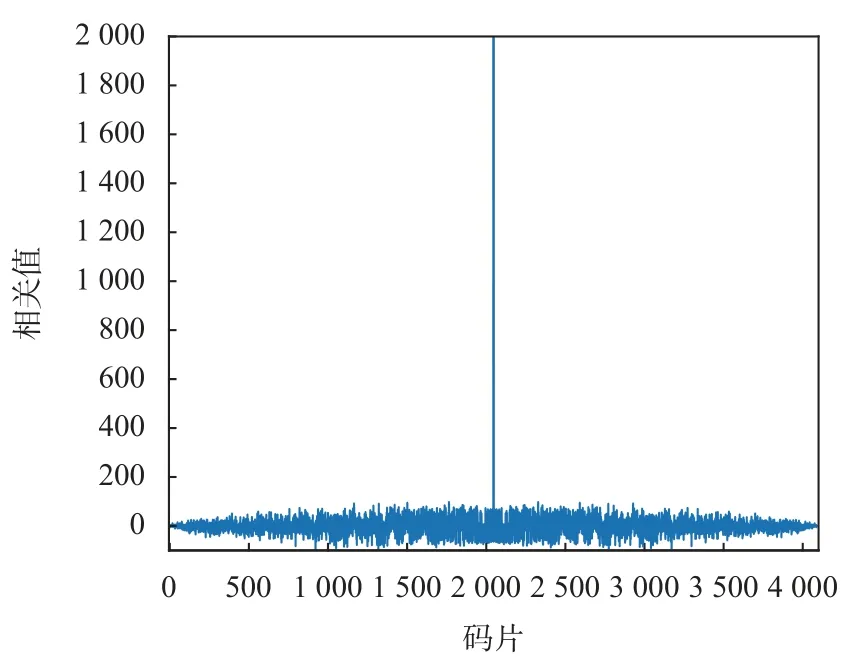
圖2 BDS 4 號(hào)衛(wèi)星B1I 信號(hào)測(cè)距碼的自相關(guān)函數(shù)
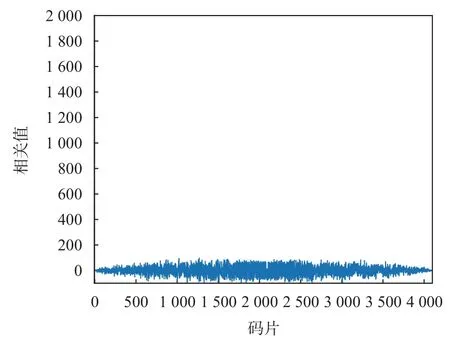
圖3 BDS 4 號(hào)和10 號(hào)衛(wèi)星B1I 信號(hào)測(cè)距碼的互相關(guān)函數(shù)
2 GNSS 反射信號(hào)模型
在實(shí)際測(cè)量中,GNSS-R 接收機(jī)平臺(tái)接收到的信號(hào)來自閃耀區(qū)內(nèi)多個(gè)散射點(diǎn)處反射信號(hào)的集合.由于反射信號(hào)的傳播路徑不同,不同散射點(diǎn)的時(shí)延也不同.GNSS-R 接收機(jī)、GNSS 衛(wèi)星和散射點(diǎn)始終處于相對(duì)運(yùn)動(dòng)狀態(tài),因此不同散射點(diǎn)處的反射信號(hào)具有不同的多普勒頻率.故不同的時(shí)延間隔和多普勒頻率間隔對(duì)反射信號(hào)具有不同的影響,而海面的特征信息包含在不同的反射信號(hào)里.
2.1 伍德沃德模糊函數(shù)
雷達(dá)脈沖壓縮技術(shù)中,距離和多普勒頻率測(cè)量的不確定性是一個(gè)重要問題.為了分析這種不確定性,可以應(yīng)用模糊函數(shù)這一理論工具.該函數(shù)最初由伍德沃德引入用于雷達(dá)系統(tǒng)的分析.而在GNSS-R 中,雙基雷達(dá)方程是其理論基礎(chǔ),因此也可借用伍德沃德模糊函數(shù)來進(jìn)行相關(guān)分析.故伍德沃德模糊函數(shù)χ(τ,f)可定義為[23]
式中: ?τ為時(shí)延變化值;?f為多普勒頻率變化值;Ti為積分時(shí)間;uPRN(·)為PRN 序列.
圖4 給出了矩形脈沖的模糊函數(shù),它是實(shí)際PRN 模糊函數(shù)的理想化.由圖4 可知,該函數(shù)的最大值出現(xiàn)在原點(diǎn)(τ=f=0)處,值為1.
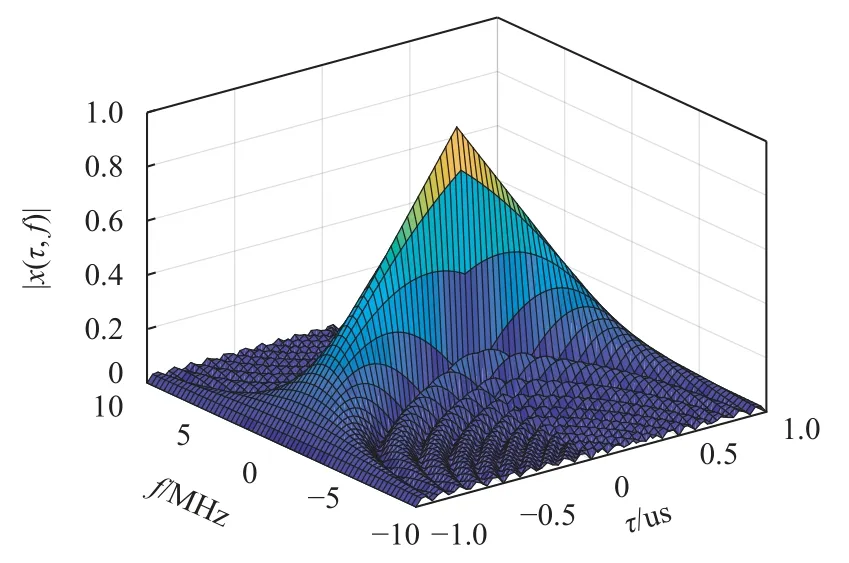
圖4 矩形脈沖的模糊函數(shù)
沿軸?τ=0(零延遲)和?f=0(零多普勒)的窄區(qū)域中,模糊函數(shù)可以用三角形相關(guān)函數(shù)Λ(?τ)及sinc型函數(shù)S(?f)的乘積來近似
Λ函數(shù)和S函數(shù)分別決定了等環(huán)形區(qū)和等多普勒區(qū).圖4 在零多普勒和零延遲時(shí)的切片分別為三角形Λ函數(shù)和具有相移的sinc函數(shù).
式中,τc為碼片周期.
2.2 時(shí)延一維相關(guān)功率
Zavorotny 和Voronovich 提出了一個(gè)經(jīng)典理論模型用于描述GNSS 散射信號(hào)的功率,該模型基于雙基雷達(dá)方程,使用基爾霍夫近似的幾何光學(xué)極限導(dǎo)出了散射信號(hào)的相關(guān)功率,表達(dá)式為[23]
其中,
式中: τ為兩條不同路徑的時(shí)間延遲,即從發(fā)射機(jī)-散射點(diǎn)-接收機(jī)和發(fā)射機(jī)-鏡面反射點(diǎn)-接收機(jī)的路徑;fd為多普勒頻移;Ti為相干積分時(shí)間;G是積分區(qū)域;D為接收機(jī)的天線增益;Λ為測(cè)距碼的自相關(guān)函數(shù);S為多普勒濾波函數(shù);Λ2(?τ)|S(?f)|2是上文提到的GNSS-R 雙基雷達(dá)模糊函數(shù),描述了相關(guān)功率譜對(duì)時(shí)延和多普勒頻移的選擇性;r0和r分別為發(fā)射機(jī)、接收機(jī)到散射點(diǎn)的距離;ρ為平均海面上的某一散射點(diǎn);σ0為歸一化散射截面(或散射系數(shù)),在KA-GO的近似條件下,可表示為
式中:R是菲涅爾反射系數(shù);q是散射向量;P(·)是海面坡度概率密度函數(shù)(probability density function,PDF).文獻(xiàn)[24]利用Gram-Charlier 分布來描述海面坡度PDF,Gram-Charlier 分布通過修正二維高斯分布,在海面坡度PDF 中引入了偏度(skewness)和峰度(peakedness).GNSS 信號(hào)的等效均方坡度(mean square slopes,MSS)[25]:
其中,
式中,U表示海面風(fēng)速,單位為m/s.
反射信號(hào)的時(shí)延一維相關(guān)功率與海面的風(fēng)速和風(fēng)向等物理參數(shù)有著密切的關(guān)系[23].在接收機(jī)高度為682km,風(fēng)向與入射面夾角為0°的條件下,風(fēng)速為4~10m/s,間隔為2m/s 的反射信號(hào)時(shí)延一維相關(guān)功率曲線如圖5 所示.由圖5 可知,在不同風(fēng)速條件下,反射信號(hào)的時(shí)延一維相關(guān)功率曲線呈現(xiàn)出不同的特征.這種差異可以歸因于波形對(duì)海面風(fēng)速的敏感性,隨著風(fēng)速逐漸增大,波形后沿斜率也逐漸變大.
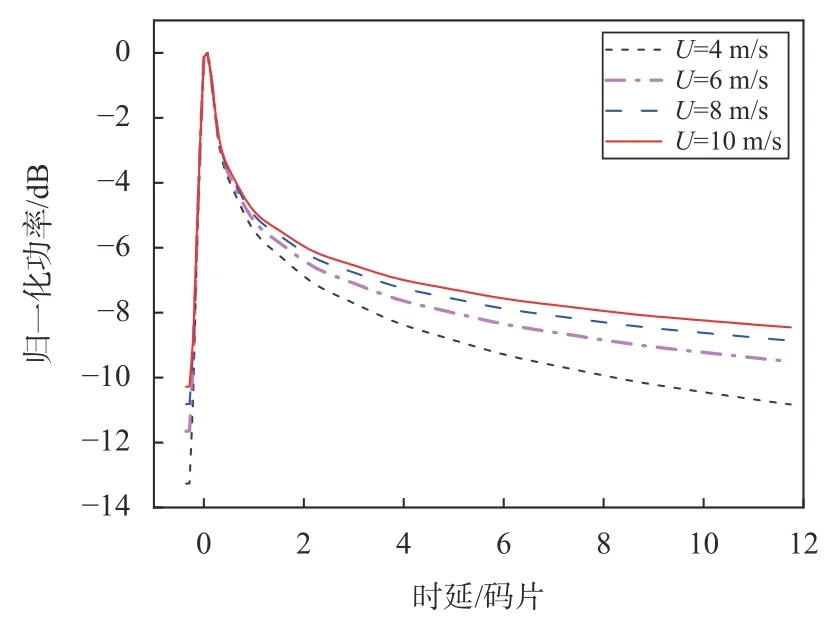
圖5 時(shí)延一維相關(guān)功率曲線
2.3 時(shí)延-多普勒二維相關(guān)功率
式(6)可表示為二維卷積形式
式(12)可通過二維傅里葉變換加速計(jì)算.在式(12)中,χ2(τ,fd)是模糊函數(shù),χ可理解為來自單個(gè)延遲-多普勒單元的散射信號(hào)的脈沖響應(yīng).Σ由式(13)給出
GNSS 反射信號(hào)的時(shí)延-多普勒二維相關(guān)功率可視為海面閃耀區(qū)內(nèi)散射信號(hào)相關(guān)功率在時(shí)延和多普勒兩個(gè)維度上的映射,也稱為DDM.由式(12)可知,DDM 可由(τ,fd)域上的二維卷積完全確定,故只需在時(shí)延-多普勒坐標(biāo)系下考慮式(12),而無需關(guān)注模擬的物理表面的實(shí)際大小.
為了得到DDM,先進(jìn)行一個(gè)變量變換,將其從空間域(x,y)轉(zhuǎn)換到時(shí)延-多普勒域(τ,fd)
式(13)中的表面微分d2ρ變?yōu)?/p>
式中: dfd,xy和dτxy為新積分變量的微分;|J|為式(14)中變量變換的雅可比矩陣的行列式.雅可比矩陣說明了物理空間與延遲-多普勒空間的對(duì)應(yīng)關(guān)系.
等時(shí)延線和等多普勒線將反射面劃分成了大量的反射面元,而時(shí)延間隔和多普勒間隔的大小決定了這些反射面元的大小,如圖6 所示.
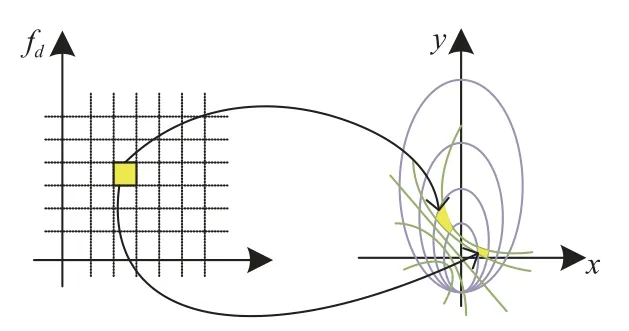
圖6 反射面單元與時(shí)延-多普勒單元映射圖
GNSS 反射信號(hào)由于傳播特性和海面粗糙性,總體表現(xiàn)為信號(hào)幅度的衰減,且相對(duì)于直射信號(hào),反射信號(hào)有不同的時(shí)延和多普勒頻移.GNSS 海面反射信號(hào)是不同海面散射單元的散射信號(hào)共同作用的結(jié)果.利用等延遲線和等多普勒線將海面散射單元?jiǎng)澐殖梢粋€(gè)個(gè)小反射面元,這些小面元在時(shí)延和多普勒兩個(gè)維度上的功率疊加起來即是反射信號(hào)的DDM.反射面單元與時(shí)延-多普勒單元的映射關(guān)系如圖6 所示.
3 結(jié)果與分析
為分析時(shí)延間隔對(duì)海面反射面元的影響,圖7 仿真了在多普勒頻移一定時(shí),時(shí)延間隔分別為0.25、0.50 和1.0 個(gè)碼片的反射信號(hào)海面散射單元的劃分區(qū)域顯示.在圖7 中,接收機(jī)高度為682km,GNSS衛(wèi)星高度角為60°,風(fēng)速為10m/s,多普勒間隔固定為500Hz.
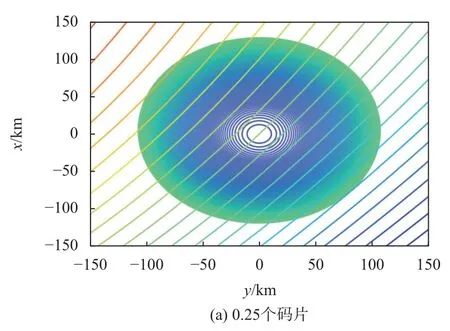
圖7 不同時(shí)延間隔的海面散射單元?jiǎng)澐?/p>
當(dāng)多普勒頻移一定時(shí),時(shí)延間隔越小,等延遲線和等多普勒線相交的反射面面元越小.由圖7 可知,整個(gè)環(huán)形區(qū)的寬度及環(huán)的厚度取決于時(shí)間延遲τ和雙基幾何結(jié)構(gòu),而環(huán)形區(qū)的寬度攜帶了有關(guān)海浪坡度或近海面風(fēng)的信息.
當(dāng)時(shí)延保持不變時(shí),多普勒頻移間隔的大小對(duì)于DDM 波形的仿真結(jié)果有一定影響.圖8 展示了兩種情況下的評(píng)估結(jié)果.仿真中涉及到的主要輸入?yún)?shù)如表1 所示.
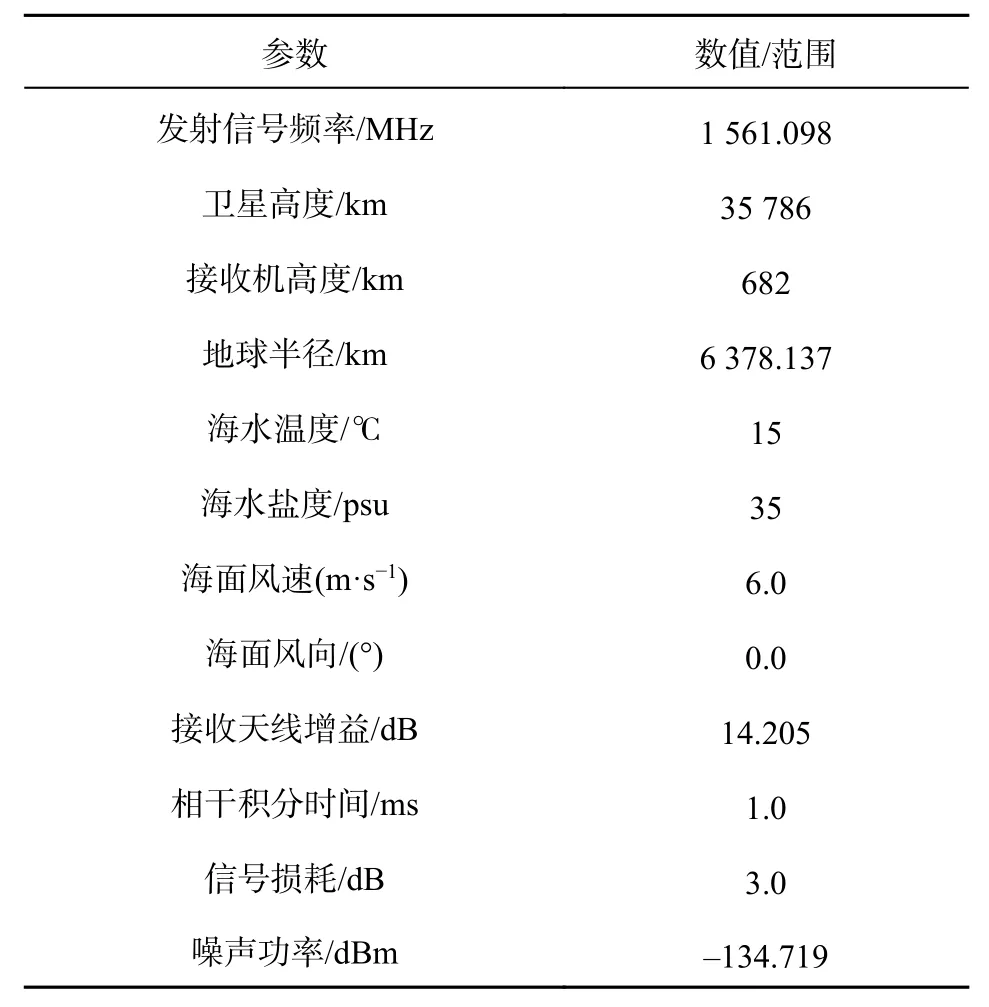
表1 主要輸入?yún)?shù)
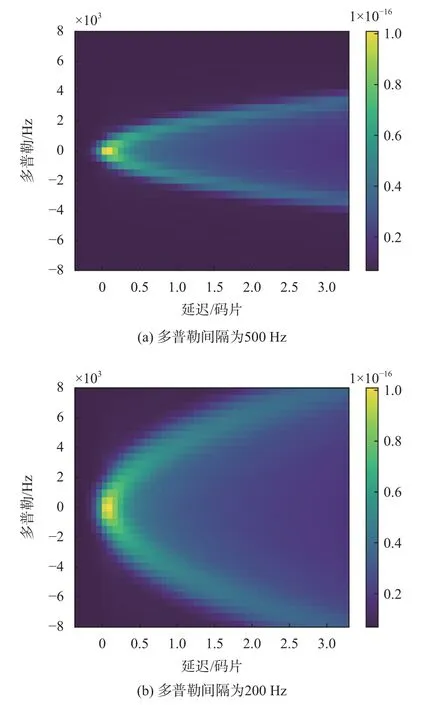
圖8 不同多普勒間隔下的DDM 波形
圖8 給出了不同多普勒間隔下的DDM 波形.由圖8 可知,二維時(shí)延-多普勒相關(guān)功率呈經(jīng)典的“馬蹄”狀分布.其中圖8(a)是多普勒間隔為500Hz 時(shí)的DDM 波形.圖8(b)的多普勒間隔為200Hz,對(duì)比圖8(a)和圖8(b)可知,多普勒頻移間隔越小,仿真得到的DDM 波形分辨率越高.由圖8 可以發(fā)現(xiàn),DDM最大相關(guān)功率位于時(shí)延和多普勒為零處,也就是鏡面反射點(diǎn)的位置.鏡面反射點(diǎn)是發(fā)射機(jī)-地球表面-接收機(jī)之間距離最短的點(diǎn),是測(cè)量和建模的主要參考點(diǎn).通過對(duì)比圖4 和圖8 可以發(fā)現(xiàn),DDM 具有很強(qiáng)的中心瓣和較弱的旁瓣,恰好反映了GNSS 信號(hào)的伍德沃德模糊函數(shù)的結(jié)構(gòu)特征.
DDM 波形中的每一個(gè)單元表示GNSS-R 海面反射信號(hào)在特定時(shí)延和多普勒頻移下的強(qiáng)度,或者說相關(guān)功率.通過觀察DDM 波形,可以得到反射信號(hào)在時(shí)延和多普勒頻率上的功率分布情況.DDM 對(duì)于分析海面目標(biāo)的散射特性具有重要意義,在GNSS-R的研究和應(yīng)用中起著重要作用.
4 結(jié)束語
本文在經(jīng)典Z-V 模型的基礎(chǔ)上,研究了GNSS海面反射信號(hào)特性,所使用的建模方法不僅可以仿真時(shí)延一維相關(guān)功率,而且可以模擬反射信號(hào)的DDM.討論了不同風(fēng)速下的相關(guān)功率變化情況,數(shù)值結(jié)果表明,時(shí)延一維相關(guān)功率對(duì)風(fēng)速具有敏感性.研究了時(shí)延間隔對(duì)海面散射單元的影響,結(jié)果表明,時(shí)延間隔越大,等延遲線和等多普勒線相交的區(qū)域越大.分析了多普勒間隔對(duì)時(shí)延-多普勒二維相關(guān)功率即DDM的影響,結(jié)果表明,多普勒間隔越小,DDM分辨率越高,海面散射單元?jiǎng)澐衷叫。S相關(guān)功率的計(jì)算越精確.且在時(shí)延間隔不變的情況下,多普勒間隔變小,海面散射區(qū)域尾部逐漸展寬.因經(jīng)典的Z-V 模型中海面散射模型基于物理光學(xué)的幾何光學(xué)極限,故該模型不適用于低掠入射角場(chǎng)景.為此,后續(xù)將基于更合理的海面散射模型開展海面GNSS 散射信號(hào)建模及應(yīng)用研究.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03