基于NDO的永磁同步電動機自適應分數階滑模控制
2023-11-28 09:40:12趙希梅王超金鴻雁
中國機械工程 2023年9期
趙希梅 王超 金鴻雁


摘要:針對永磁同步電動機(PMSM)驅動的高檔數控機床進給系統易受參數變化、外部擾動等不確定性因素影響的問題,設計了一種基于非線性干擾觀測器(NDO)的自適應分數階滑模控制(AFOSMC)方法。建立了含有不確定性的PMSM動態數學模型。將自適應控制與分數階滑模控制(FOSMC)相結合,抑制了整數階滑模控制的抖振現象,且能實時調整切換增益,提高了系統的控制精度。然而,外部干擾會對系統產生極大的影響,因此采用NDO實時辨識外部干擾,將觀測值作為前饋補償引入AFOSMC中,以提高控制器的抗干擾能力。實驗結果表明,基于NDO的AFOSMC方法有效地削弱了抖振現象,提高了進給系統的跟蹤性能和抗擾能力。
關鍵詞:永磁同步電動機;分數階滑模控制;自適應控制;非線性干擾觀測器
中圖分類號:TM341
DOI:10.3969/j.issn.1004-132X.2023.09.010
Adaptive Fractional Order Sliding Mode Control for PMSMs Based on NDO
ZHAO Ximei WANG Chao JIN Hongyan
Abstract: The feed system of CNC machines driven by PMSM servo system was susceptible to parameters variation, external disturbances and other uncertain factors, an AFOSMC scheme was designed based on NDO. First, the dynamic mathematical model of PMSM with uncertainties was established. Then, FOSMC and adaptive control were combined to suppress the chattering phenomenon of integer order sliding mode control, and the switching gain might be adjusted in real time to improve the control accuracy of the system. However, external disturbances would have a great impact on the system. Therefore, NDO was used to identify the external disturbances in real time, and the observed values were introduced into AFOSMC as feedforward compensation to improve the anti-interference ability of the controller. Finally, the experimental results show that the designed AFOSMC may weaken the chattering phenomenon effectively based on NDO, improve tracking performance and anti-interference ability of the feed systems.
Key words: permanent magnet synchronous motor(PMSM); fractional order sliding mode control(FOSMC); adaptive control; nonlinear disturbance observer(NDO)
0 引言
高速度高精度加工是高檔數控機床發展的重大趨勢和關鍵指標,采用永磁同步電動機(permanent magnet synchronous motor,PMSM)驅動的數控機床進給系統已經在電子設備制造、精密儀器儀表及工業機器人等領域廣泛應用。然而,快速發展的制造業對數控機床進給系統的要求越來越高,盡管采用PMSM作為動力源的進給系統具有效率高、體積小、結構簡單等優點,但PMSM控制系統是一個強耦合、多變量的非線性系統,易受參數變化和負載擾動的影響,因此,難以在較寬的調速范圍內精確控制轉速,難以保證數控機床的速度平穩性和準確性[1]。為了解決上述問題,學者們采用了許多方案,例如魯棒控制、自適應控制、模糊控制及神經網絡等[2-5]。
近年來,滑模控制(sliding mode control,SMC)在伺服系統中被廣泛應用。SMC相較于PID控制具有響應速度快、對參數變化不敏感的優勢,但它不可避免地存在抖振現象,影響控制效果。為削弱SMC的抖振現象,采用分數階滑模控制(fractional order sliding mode control,FOSMC)替代傳統整數階SMC,分數階滑動面在切換過程中會經歷較慢的能量傳遞,可以有效地削弱抖振。FOSMC已廣泛應用于工業控制領域,例如機械手臂、遠程電氣化系統和電機控制等[6]。ZAIHIDEE等[7]對FOSMC和SMC進行了比較,實驗結果證明FOSMC具有更平滑的控制過程、更好的跟蹤性能和更小的抖振,但是加入負載轉矩后系統存在穩態誤差。為滿足可達性條件,SMC中的切換增益應大于不確定量的上界,但是在實際工程中不確定因素的上界是難以得到的,選擇過大的切換增益會增加系統的抖振,為此,可以使用自適應切換增益,根據系統狀態實時改變控制器參數。KIM等[8]提出了一種自適應滑模速度控制器,在PMSM參數嚴重變化的情況下保證了精確的速度跟蹤性能。趙希梅等[9]使用自適應積分滑模控制器,不僅使電機的跟蹤精度有所提高,而且抑制了抖振現象。JUNEJO等[10]設計了一種自適應終端滑模趨近律,可以實時調整切換增益,但控制器較為復雜,難以實際應用。SMC對參數變化具有較強的魯棒性,但是變化的負載轉矩會削弱控制效果[11-12]。為了提高控制器的抗擾能力,可以采用非線性干擾觀測器(nonlinear disturbance observer, NDO)估計外部擾動并再將觀測值引入控制器中。劉旭東等[13]采用NDO估計系統擾動并用于前饋補償控制,提高了控制器的性能。NGUYEN等[14]設計了一種變增益的NDO,可以在突加負載時增加收斂速度,提高了SMC的抗擾性能,但是觀測值的波動較大。
本文設計了一種基于NDO的自適應分數階滑模控制(adaptive fractional order sliding mode control based on NDO,NDO-AFOSMC)方法。利用分數階滑模面能量傳遞較慢的特點削弱抖振現象,采用自適應切換增益來應對不同的運行狀態,以實現提高控制精度的同時避免產生較大抖振,通過NDO來估計外部干擾,將觀測值作為前饋補償控制添加到控制律中,避免產生系統受外部擾動影響而導致調速性能下降的問題。最后,通過模擬機床進給系統的工況,用實驗來驗證所提控制策略的有效性。
1 PMSM數學模型
PMSM電磁轉矩為
3 實驗分析
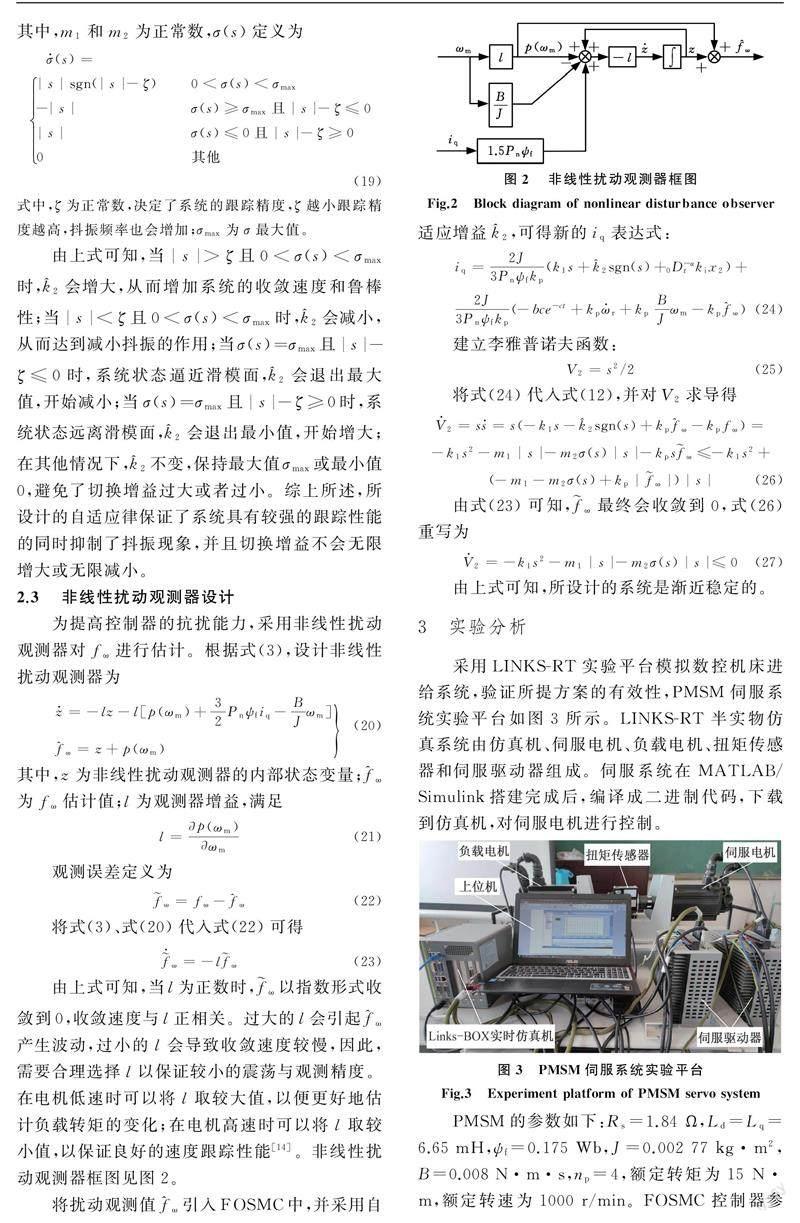
采用LINKS-RT實驗平臺模擬數控機床進給系統,驗證所提方案的有效性,PMSM伺服系統實驗平臺如圖3所示。LINKS-RT半實物仿真系統由仿真機、伺服電機、負載電機、扭矩傳感器和伺服驅動器組成。伺服系統在MATLAB/Simulink搭建完成后,編譯成二進制代碼,下載到仿真機,對伺服電機進行控制。
PMSM的參數如下:Rs=1.84 Ω,Ld=Lq=6.65 mH,ψf=0.175 Wb,J=0.002 77 kg·m2,B=0.008 N·m·s,np=4,額定轉矩為15 N·m,額定轉速為1000 r/min。FOSMC控制器參數如下:kp=100;ki=0.51;α=0.4;k1=0.401;k2=7.43。NDO-AFOSMC控制器參數為:kp=100;ki=0.51;α=0.4;k1=0.401;m1=7.43;m2=1;σmax=5;ζ=10。
首先,驗證NDO的估計能力,取l=1000,假設電機參數未發生改變,則fω僅與負載轉矩有關。圖4所示為負載轉矩給定值與觀測值曲線,可以看出,負載轉矩在0.3 s時從5 N·m突變為10 N·m,NDO可以精確地觀測負載轉矩,4.5 ms后收斂到穩定,并且幾乎沒有波動。由此可知,所設計的NDO具有較快的收斂速度和較高觀測精度。對SMC、FOSMC和NDO-AFOSMC系統在不同工況下進行對比實驗。
為了模擬進給系統受到外部擾動影響的情況,PMSM空載啟動,給定轉速為1000 r/min,電機參數保持不變,在1 s時突加15 N·m負載轉矩并在2 s時卸下,SMC、FOSMC和NDO-AFOSMC系統轉速曲線如圖5所示。由圖5a可以看出,在啟動時FOSMC和NDO-AFOSMC系統收斂速度較快,在0.15 s達到穩定狀態,并且抖振非常小,不存在超調,SMC系統收斂速度較慢,在0.175 s達到穩態,具有較大抖振,存在1.2%的超調量。由圖5b可以看出,系統在突加負載轉矩和突卸負載轉矩后,三種方法都可以很好地跟蹤給定轉速。突加負載:SMC系統最大轉速偏差為59 r/min,在76 ms后恢復到穩態;FOSMC系統最大轉速偏差為35 r/min,比SMC系統小40.68%,在5 ms恢復到穩態,比SMC系統快93.42%;NDO-AFOSMC系統最大轉速偏差為23 r/min,比FOSMC系統小34.29%,在3 ms恢復到穩態,比FOSMC系統快40%。突卸負載:SMC、FOSMC和NDO-AFOSMC系統最大轉速偏差分別為50 r/min、17 r/min和13 r/min,并且NDO-AFOSMC系統收斂速度最快,FOSMC系統收斂速度次之。綜上所述,分數階滑模面相對于傳統整數階滑模面明顯削弱了抖振現象,并且所設計的NDO-AFOSMC提高了進給系統的抗擾能力。
為了驗證進給系統的跟蹤性能,PMSM帶載運行,負載轉矩為10 N·m,給定的轉速信號為幅值為300 r/min、周期為0.628 s的正弦信號,如圖6所示。圖7所示為正弦輸入的三種控制策略的轉速跟蹤誤差曲線,可知SMC、FOSMC和NDO-AFOSMC系統最大轉速偏差分別為58 r/min(19.3%)、32 r/min (10.7%)和15 r/min(5%),NDO-AFOSMC系統跟蹤誤差最小。綜上所述,所設計的NDO-AFOSMC有效地提高了進給系統的跟蹤性能。
電機參數變化是影響進給系統跟蹤精度的重要因素,為了驗證參數變化對系統的影響,將控制器中所用到的電機參數B、J分別變為對應標稱值的2倍,給定轉速為1000 r/min,在1 s時加入10 N·m負載轉矩,圖8所示為加入負載后三種控制策略的轉速跟蹤曲線。由圖8a可以看出,加入負載后,SMC系統在標稱狀態下最大轉速偏差為38 r/min,在83 ms后恢復到穩態,參數變化后最大轉速偏差為65 r/min,增加了71.1%,收斂速度比標稱狀態相同。由圖8b可以看出,加入負載后,FOSMC系統在標稱狀態下最大轉速偏差為20 r/min,在3 ms后恢復到穩態,參數變化后最大轉速偏差為21 r/min,增加了5%,在4 ms恢復到穩態,慢了1 ms,并且存在2 r/min的穩態誤差。由圖8c可以看出,加入負載后,NDO-AFOSMC系統在標稱狀態下最大轉速偏差為11 r/min,在2 ms后恢復到穩態,參數變化后最大轉速偏差為標稱狀態相同,收斂速度比標稱狀態慢了0.4 ms。因此,電機參數變化對NDO-AFOSMC系統影響是最小的。綜上所述,所設計的NDO-AFOSMC系統在參數變化后依然可以保持較強的抗擾能力。
4 結語
實驗結果表明,采用AFOSMC顯著地削弱了傳統整數階SMC的抖振現象。使用自適應切換增益,并且與NDO結合后,進一步提高了電機的跟蹤精度,降低了負載轉矩對控制性能的影響,即使參數嚴重變化也能保持較高的魯棒性,提高了收斂速度,顯著地減小了轉速跟蹤誤差,能夠滿足PMSM驅動數控機床進給系統的跟蹤性能和魯棒性能要求。
本文通過模擬機床進給系統的工況情況,用實驗驗證了NDO-AFOSMC方法的有效性,同時,所提方法也適用于機械手臂、工業控制等控制精度要求較高的場合。
參考文獻:
[1]BARKAT S, TLEMCANI A,NOURI H. Noninteracting Adaptive Control of PMSM Using Interval Type-2 Fuzzy Logic systems[J]. IEEE Transactions on Fuzzy Systems, 2011, 19(5):925-936.
[2]侯利民, 申鶴松, 閻馨, 等.永磁同步電機調速系統H∞魯棒控制[J].電工技術學報,2019,34(7):1478-1487.
HOU Liqun, SHEN Hesong, YAN Xin, et al. H∞ Robust Control of PMSM Speed Regulation System[J]. Transactions of China Electrotechnical Society, 2019, 34(7):1478-1487.
[3]付東學, 趙希梅. 永磁直線同步電機自適應反推全局快速終端滑模控制[J]. 電工技術學報, 2020, 35(8):1634-1641.
FU Dongxue, ZHAO Ximei. Adaptive Backstepping Global Fast Terminal Sliding Mode Control for Permanent Magnet Linear Synchronous Motor[J]. Transactions of China Electrotechnical Society, 2020, 35(8):1634-1641.
[4]DELAVIRI H, GHADERI R, RANJBAR A, et al. Fuzzy Fractional Order Sliding Mode Controller for Nonlinear Systems[J]. Communications in Nonlinear Science and Numerical Simulation, 2010, 15(4):963-978.
[5]金鴻雁, 趙希梅. 永磁直線伺服系統遞歸小波Elman 神經網絡互補滑模控制[J]. 電機與控制學報, 2019, 23(10):102-109.
JIN Hongyan, ZHAO Ximei. Wavelet-based Elman Neural Network Complementary Sliding Mode Control for Permanent Magnet Linear Servo System[J]. Electric Machines and Control, 2019, 23(10):102-109.
[6]SUN G, MA Z. Practical Tracking Control of Linear Motor with Adaptive Fractional Order Terminal Sliding Mode Control[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(6):2643-2653.
[7]ZAIHIDEE F M,MEKHILEF S,MUBIN M.Application of Fractional Order Sliding Mode Control for Speed Control of Permanent Magnet Synchronous Motor[J]. IEEE Access, 2019, 7:101765-101774.
[8]KIM E K, KIM J, NGUYEN H T, et al. Compensation of Parameter Uncertainty Using an Adaptive Sliding Mode Control Strategy for an Interior Permanent Magnet Synchronous Motor Drive[J]. IEEE Access, 2019, 7:11913-11923.
[9]趙希梅, 姬相超, 王浩林.永磁直線同步電動機的時滯自適應積分滑模控制[J].電機與控制學報, 2020, 24(8):44-50.
ZHAO Ximei, JI Xiangchao, WANG Haolin. Time Delay Adaptive Integral Sliding Mode Control for Permanent Magnet Linear Synchronous Motor[J]. Electric Machines and Control, 2020, 24(8):44-50.
[10]JUNEJO A K, XU W, MU C, et al. Adaptive Speed Control of PMSM Drive System Based a New Sliding-mode Reaching Law[J]. IEEE Transactions on Power Electronics, 2020, 35(11):12110-12121.
[11]周華偉, 于曉東, 高猛虎, 等.基于不匹配干擾觀測器的圓筒型永磁直線電機新型滑模速度控制[J].中國電機工程學報, 2018, 38(7):2163-2170.
ZHOU Huawei, YU Xiaodong, GAO Menghu, et al. Novel Sliding Mode Speed Control for Tubular Permanent Magnet Linear Motors Based on Mismatched Disturbance Observers[J]. Proceedings of the CSEE, 2018, 38(7):2163-2170.
[12]LIU X, YU H, YU J, et al. Combined Speed and Current Terminal Sliding Mode Control with Nonlinear Disturbance Observer for PMSM Drive[J]. IEEE Access, 2018, 6:29594-29601.
[13]劉旭東, 李珂, 張奇, 等.基于非線性擾動觀測器的永磁同步電機單環預測控制[J].中國電機工程學報, 2018, 38(7):2153-2162.
LIU Xudong, LI Ke, ZHANG Qi,et al. Single-loop Predictive Control of PMSM Based on Nonlinear Disturbance Observers[J]. Proceedings of the CSEE, 2018, 38(7):2153-2162.
[14]NGUYEN A T, BASIT B A, CHOI H H, et al. Disturbance Attenuation for Surface-mounted PMSM Drives Using Nonlinear Disturbance Observer-based Sliding Mode Control[J]. IEEE Access, 2020, 8:86345-86356.
[15]SHAH P, AGASHE S. Review of Fractional PID Controller[J]. Mechatronics, 2016, 38:29-41.
[16]張碧陶, 皮佑國. 基于分數階滑模控制技術的永磁同步電機控制[J]. 控制理論與應用, 2012, 29(9):1193-1197.
ZHANG Bitao, PI Youguo. Fractional Order Sliding-mode Control for Permanent Magnet Synchronous Motor[J]. Control Theory & Applications, 2012, 29(9):1193-1197.
[17]周挺, 徐宇工, 吳斌. 球形機器人的自適應分數階PIλDμ滑模速度控制方法[J]. 吉林大學學報(工學版), 2021, 51(2):728-737.
ZHOU Ting, XU Yugong, WU Bin. Adaptive Fractional PIλDμ Sliding Mode Control Method for Speed Control of Spherical Robot[J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(2):728-737.
[18]王振濱, 曹廣益, 朱新堅. 分數階線性定常系統的穩定性及其判據[J]. 控制理論與應用, 2004,21(6):922-926.
WANG Zhenbin, CAO Guangyi, ZHU Xinjian. Stability Conditions and Criteria for Fractional Order Linear Time-invariant Systems[J]. Control Theory & Applications, 2004,21(6):922-926.
(編輯 陳 勇)
作者簡介:
趙希梅,女,1979年生,教授、博士研究生導師。研究方向為電機控制、智能控制等。E-mail:zhaoxm_sut@163.com。
收稿日期:2021-12-24修回日期:2023-03-08
基金項目:遼寧省自然科學基金(20170540677)