滑刀開溝-氣力引射式液肥霧化側深施肥裝置設計與試驗
2023-11-26 10:12:16楊秀麗甄文斌
農業工程學報 2023年16期
關鍵詞:深度
楊秀麗 ,陳 彬 ,邢 航 ,甄文斌 ,齊 龍 ,2※
(1. 華南農業大學工程學院,廣州 510642;2. 嶺南現代農業科學與技術廣東省實驗室,廣州 510642;3. 農業農村部南京農業機械化研究所,南京 210014)
0 前言
國內水稻施肥方式一直以表面撒施、條施、噴施技術為主,存在化肥用量高、利用率低的問題,對生態、農業綠色可持續發展造成了阻礙[1]。水稻側深施肥技術可將肥料施在水稻秧苗根系附近并讓泥土覆蓋,最大程度提高肥料利用率,施肥量相對傳統施肥方式少,可降低化肥對水田周邊水系的污染,促進水稻分蘗,提高水稻產量[2-3]。現有的水田肥料側深施機具多使用固體肥,國產固體肥受潮后黏度變大,易造成排肥不均、肥料堵塞等問題;液肥具有吸收利用率高、肥效好、成分配比精準、利用率可達80%以上[4]。因此,開展水田液肥側深施肥機械的研究對水稻綠色生產具有重要意義。
液肥深施技術可分為條形深施和扎穴深施。RAHMAN 等[5]研制了一種Y 型犁刀及圓盤開溝器相結合的液肥注射式深施裝置,利用圓盤開溝器減少Y 型犁刀的工作阻力,通過Y 型犁刀控制施肥深度并增加液肥與土壤的作用面積,從而提高肥料利用率。BASSETT[6]研制了一種液肥開溝深施機,該機利用波紋圓盤開溝器開溝,肥料通過噴肥器施入溝中,最后由鎮土輪覆蓋壓實土壤,實現液肥側條深施。奚小波等[7]研制了氣爆松土注肥機,液肥在注肥機構作用下可在深土層中無堵塞噴射,并均勻擴散,工作效率達0.048 hm2/h。
SILVA 等[8]研制的液肥扎穴深施機,由地輪驅動凸輪轉動,帶動曲柄滑塊機構上下運動從而完成扎穴注肥作業,扎穴深度為90 mm。王金武等[9]設計了一種扎穴施肥機,這種施肥機藥液噴射均勻,覆蓋性較好,噴肥針的施肥深度達18 cm,對作物的機械損傷較小。楊自棟等[10]設計了一種輪盤式液肥穴播深施機,該機可實現等距、膜下、變量深施液肥,可調節施肥深度和施肥量,并能將液肥直接施入作物根系附近。周文琪等[11]針對深施型液肥穴施肥機存在損傷作物、穴口寬度大和噴肥效率低等問題,設計了一種深施型斜置式液肥穴施肥機,該機扎穴性能優越,肥料噴射均勻,對作物的機械損傷小,穴口寬度、作物損傷率、施肥量和施肥深度分別為45.0 mm、0.3%、28.5 mL/次和102 mm。
由此可見,對于液肥條形深施和扎穴深施裝置國內外學者進行了深入研究,并取得了良好效果。SAGLAM等[12]指出氣體肥料能夠與土壤混合更均勻,相比液肥吸收利用率更高。故本文結合機械側深施肥技術與液肥的各自優點,提出液肥霧化側深施技術,利用高壓氣流引射液肥,使液肥處于霧化狀態,增加與土壤顆粒的接觸面積,使肥料與深層土壤充分混合,以減少肥料流失,提高肥料利用率。參考現有文獻設計氣力引射式霧化施肥器和滑刀式開溝器的結構參數,應用EDEM 軟件仿真優化滑刀式開溝器,研制一種適用于水田的滑刀開溝-氣力引射式液肥霧化側深施肥裝置,該裝置采用滑刀式開溝器開溝,利用氣力引射式霧化施肥器霧化引射液肥,將液肥側深施于水稻根區附近土壤。
1 材料與方法
1.1 滑刀開溝-氣力引射式液肥霧化側深施肥裝置
1.1.1 總體結構
滑刀開溝-氣力引射式液肥霧化側深施肥裝置主要由氣力引射式霧化施肥器、開溝部件、安裝支架組成;其中開溝部件由破土部件、推土部件、擋泥板、擋泥罩組成,如圖1 所示。
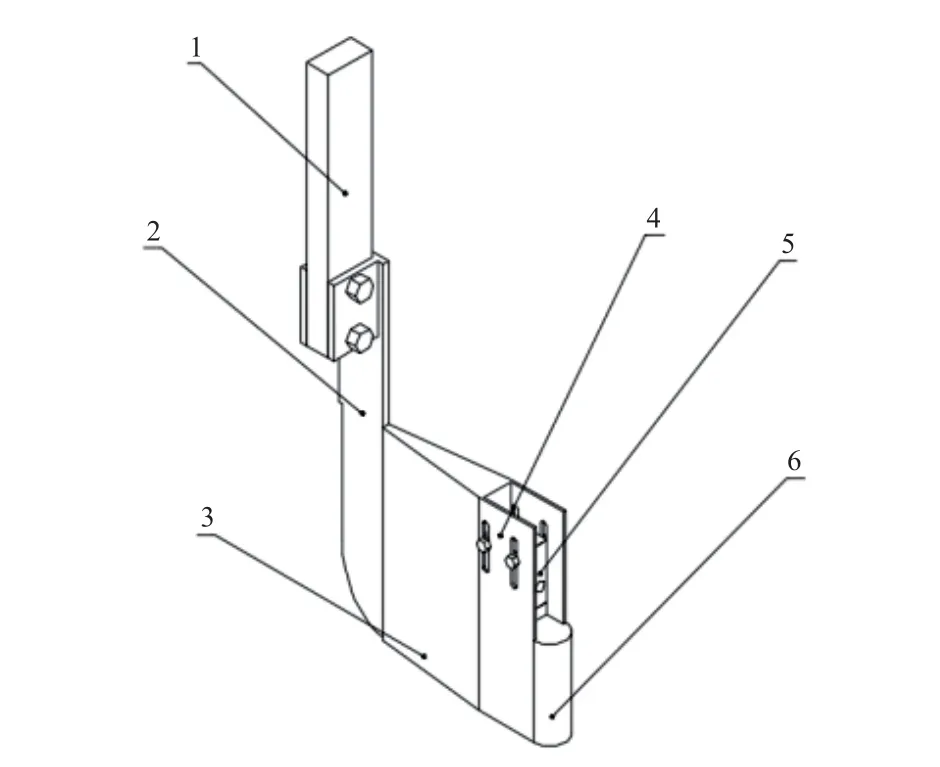
圖1 滑刀開溝-氣力引射式液肥霧化側深施肥裝置結構示意圖Fig.1 Structure diagram of side-deep fertilization device with sliding-knife furrow opener and pneumatic ejector liquid fertilizer atomizer
氣力引射式液肥霧化施肥器采用氣液同軸霧化機構,通過螺栓固定連接在擋泥部件中間,利用高速氣體在氣力引射式霧化施肥器內部產生負壓,從而引射液肥(前期試驗發現,在0.1 MPa 的供氣壓力下即可引射液肥,在0.2 MPa 的供氣壓力下即可霧化液肥,提高了施肥作業效率及均勻性),配合開溝部件實現開溝、施肥一體化作業,進而實現液肥霧化側深施。通過變換安裝支架在水田拖拉機機架上的安裝高度,可實現施肥深度調整。該裝置可加裝于插秧機、直播機或水田中耕機上,同步完成側深施肥或追肥作業。
1.1.2 氣力引射式霧化施肥器
氣力引射式霧化施肥器屬于引射器或噴射器的一種,是利用高壓工作流體的射流作用在施肥器內部產生負壓,進而卷吸低壓流體進行質量、動量和能量交換的裝置。引射器主要結構包括:工作流體入口、工作流體噴嘴、引射流體入口、接收室、混合室(喉部)、混合流體出口等,如圖2 所示。
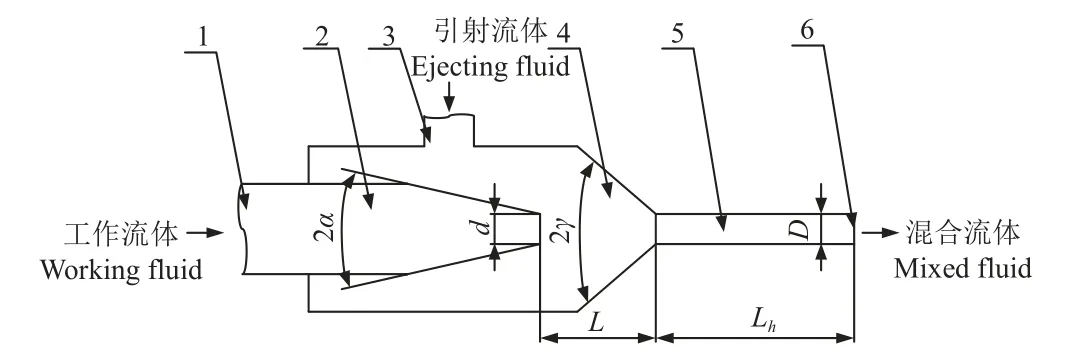
圖2 氣力引射式霧化施肥器結構示意圖Fig.2 Structure diagram of pneumatic ejector fertilizer atomizer
噴嘴采用拉瓦爾噴管形式,收縮角α一般為18°~37°[13]。在拉瓦爾噴管收縮段,氣體運動遵循氣體流速與管道截面面積成反比的運動規律,收縮角α越小,出口氣體流速越大[14],抽吸的液體質量越大[13]。為提高引射效率,本文取α=18°;為降低工作過程中的耗氣量,噴嘴出口直徑取d=1 mm。
接收室收縮角γ通常取為30°~45°[15]。γ影響接收室的長度和氣體的噴射距離,收縮角越小,氣體噴射距離越長,能量消耗越多,同時施肥器尺寸也越大。綜合考慮能耗和施肥器尺寸,本文取γ=45°。定義混合室(喉部)截面積S1與工作流體噴嘴出口截面積S2之比為面積比S,當S=4 時引射器有較好的工作性能[16]。根據S=S1/S2=D2/d2得D=2.0 mm,本文初步選取D為1.5、2.0、2.5、3.0、3.5 和4.0 mm。混合室長度Lh一般為D的3~7 倍,引射器則可獲得較佳的引射性能,綜合考慮D的取值和Lh的設計原則,結合加工方便性,取固定值Lh=10.0 mm。
喉嘴距L為工作流體噴嘴出口與接收室收縮末端之間的距離,根據引射器的引射原理,喉嘴距L=(0.8~1.5)d時,噴射器有較好的工作性能[17],本文初步選取L為0.5、1.0、1.5 和2.0 mm。
當引射流體通道軸線平行于工作流體通道軸線時,引射器的能量損失最小[18],本文采用氣體通道與液體通道同軸方式設計氣力引射式霧化施肥器內腔結構。
本文設計的氣力引射式霧化施肥器主要由集流閥塊、氣管接頭、氣管、連接管件、內噴頭和外噴頭等組成,如圖3a 所示。外噴頭與集流閥塊通過螺紋固定連接在連接管件兩側;內噴頭放置在外噴頭內,通過連接管件與外噴頭凸臺之間的擠壓作用固定;氣管接頭通過螺紋連接固定在集流閥塊內,二者之間設有密封墊圈;氣管接頭與內噴頭之間通過連接管件的內部氣管連接,形成中央氣體通道;氣管與連接管件之間形成環周液肥通道。
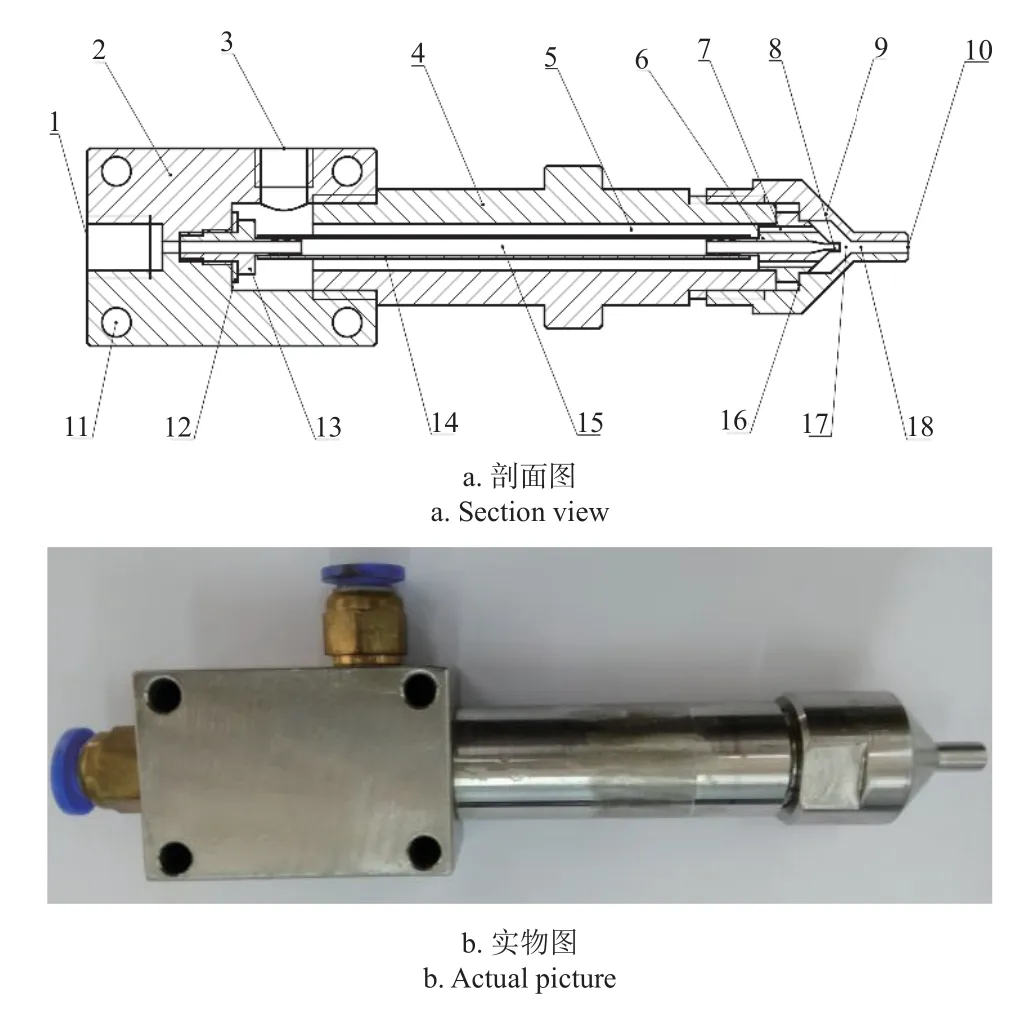
圖3 氣力引射式霧化施肥器Fig.3 Pneumatic ejector fertilizer atomizer
集流閥塊上方開有階梯狀進氣孔,側面開有液肥進口,液肥進口軸線垂直且正交進氣孔軸線;集流閥塊上開有安裝孔,保證了氣力引射式霧化施肥器的安裝固定。內噴頭與外噴頭采用漸縮錐形結構,二者出口孔同心,且它們之間形成相連通的液肥接收室和氣液混合室;內噴頭具有凸臺,凸臺上開有若干個呈圓周均勻分布的液肥通孔,液肥通孔前后連通環周液肥通道與液肥接收室。氣管接頭、內噴頭與氣管連接部分均設有寶塔接頭,保證進氣系統的密閉性。氣力引射式霧化施肥器實物如圖3b 所示。
1.2 滑刀式開溝器
水稻深施肥農藝要求施肥深度為30~80 mm,水田環境要求開溝器牽引阻力小、土壤擾動少、不纏草、不壅土、不堵塞等,本文設計的水田滑刀式開溝器主要由破土部件、推土部件、擋泥板組成。
1.2.1 破土部件
滑刀式開溝器是利用破土部件的刀刃進行鈍角式開溝入土,溝底平坦,有一定的寬度使肥料與溝底土壤密切接觸,其滑切部分為圓弧形刀刃,能切斷部分雜草及秸稈,減少工作過程中的牽引阻力及觸土部件夾掛雜草、秸稈等[19]。滑刀式開溝器的牽引阻力與破土部件的刃口曲線有關,刃口曲線的設計主要有二次函數曲線模型、等曲率半徑曲線模型和指數函數曲線模型等。隨著作業速度遞增,開溝器牽引阻力增長速率滿足規律:直線型最大、拋物線次之、指數曲線最小[20]。綜合上述研究成果,本文采用指數函數曲線模型,刃口曲線如圖4a 所示,圖中開溝器可作業深度應大于最大施肥深度,本文取b=100 mm。刃口角示意圖如圖4b 所示,刃口曲線方程如式(1)所示[21]。由式(1)可知,滑切曲線的形狀由起始滑切角θA、終止滑切角θB和可作業深度b確定。
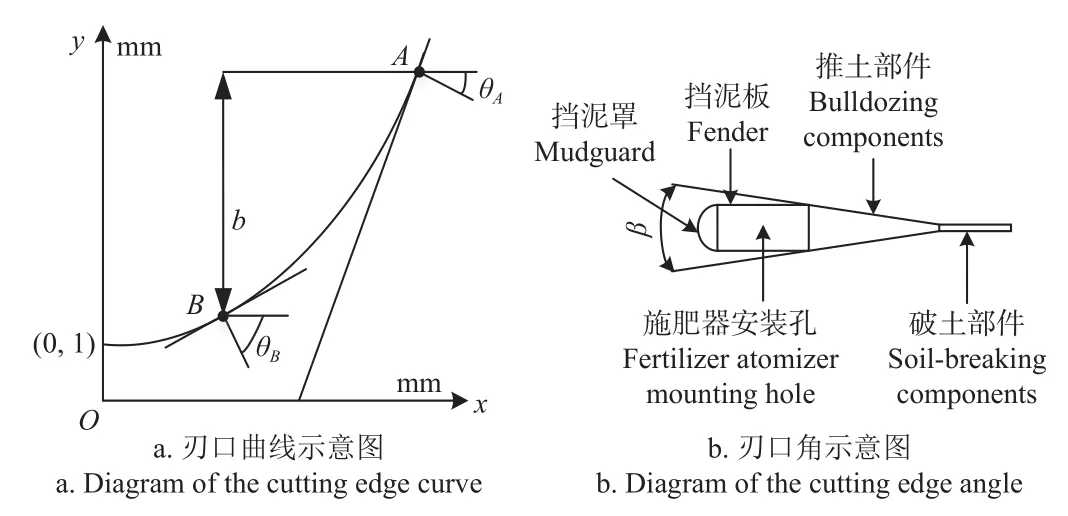
圖4 刃口示意圖Fig.4 Diagram of cutting edge
為探討滑切角與土壤阻力之間的關系,從而確定滑切角的取值范圍,需進行刃口的受力分析。滑刀式開溝器在土壤中作業時,刃口曲線上任意E點的受力分析如圖5 所示。
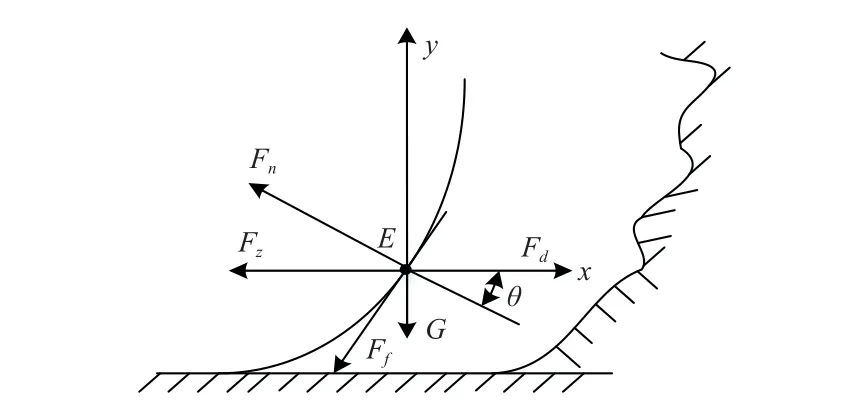
圖5 刃口曲線上任意點E 受力分析Fig.5 Force analysis at any point E on the cutting edge curve
以E為坐標原點建立水平坐標系,x、y方向上的力平衡方程為
式中μ為土壤與開溝器的摩擦系數。
根據《農業機械設計手冊》及相關文獻[22]可知,只有起始滑切角θA>φ時滑刀式開溝器才起滑切作用(φ為滑刀式開溝器與水田土壤之間的摩擦角,一般φ=10°),因此本文取θA=10°。分析圖4a 知,從刃口曲線起始點A點開始,刃口曲線AB上各點的滑切角逐漸增加,由式(4)可知,當θ<90°時,滑切角越大,土壤阻力越小。有研究表明,切割阻力隨著滑切角的增大而減小[23],開溝器刃口曲線終止滑切角θB<55°時,開溝器入土阻力最小[21]。綜合考慮,本文確定終止滑切角取值為10°<θB<55°,并等差選取θB=10°、32.5°、55°,應用EDEM 仿真軟件進行仿真優化。
1.2.2 推土部件
推土部件橫截面為等腰梯形的四棱柱,焊接在破土部件后方,作業時將堆積在破土部件的水田土壤推至滑刀式開溝器兩側,防止泥土瞬時回填肥溝。
推土部件的刃口角β是決定開溝器尺寸、工作阻力以及土壤擾動的重要因素。刃口角過小會加劇刃口磨損,使刃口發生變形失效,刃口角過大會導致入土阻力過大,取值范圍不超過90°[24]。根據《農業機械設計手冊》和預試驗,綜合考慮開溝器整體寬度和水田流動性,刃口角取值為10°<β<80°,等差選取β=10°、45°、80°,應用EDEM 軟件進行仿真優化。
1.2.3 擋泥部件
擋泥部件由擋泥板和擋泥罩組成,擋泥板上開有長條形孔,氣力引射式霧化施肥器可利用螺栓在長條形孔上滑動和鎖緊,通過改變螺栓在長條形孔上的安裝位置,實現氣力引射式霧化施肥器施肥高度的調節。擋泥部件可使氣力引射式霧化施肥器得到保護,保證其正常工作。為降低滑刀式開溝器工作過程中的開溝牽引阻力及對水田土壤的擾動,且為裝配氣力引射式霧化施肥器留出足夠的空間,設計擋泥部件寬度為滑刀式開溝器最寬處為25 mm。
結合破土部件終止滑切角與推土部件刃口角的取值,設計不同結構參數的滑刀式開溝器,并應用SolidWorks軟件建立三維模型,如圖6 所示。
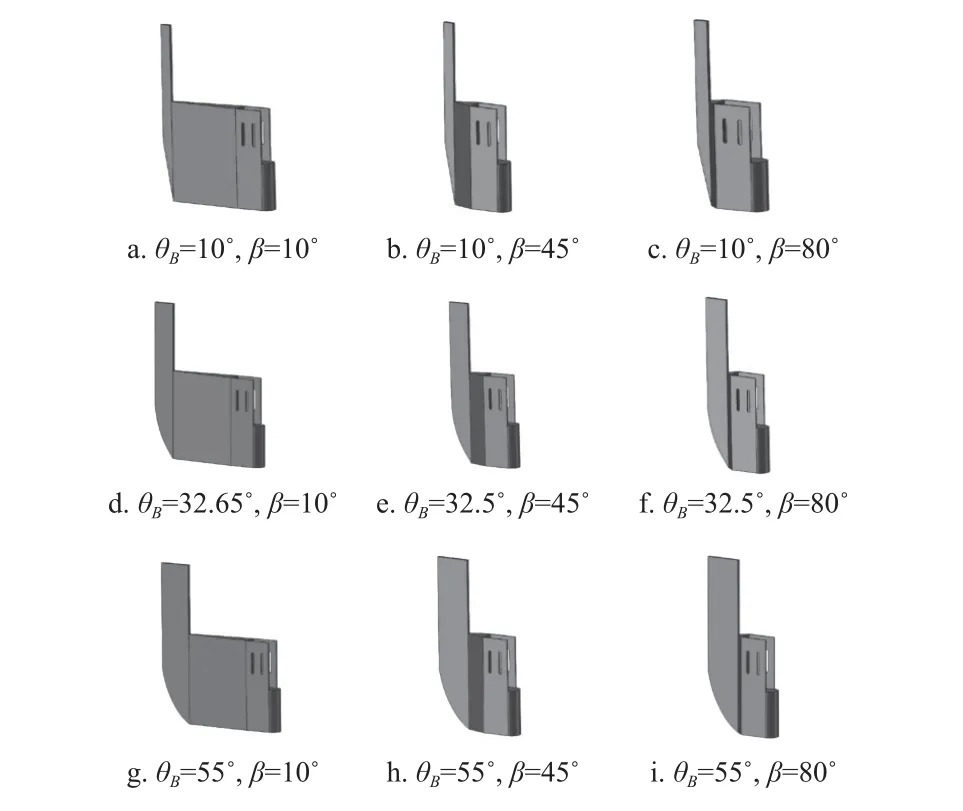
圖6 滑刀式開溝器三維模型Fig.6 Three-dimensional model of sliding-knife furrow opener
1.3 離散元仿真試驗
為分析滑刀式開溝器工作過程中水田土壤顆粒整體的運動形態及開溝器的應力分布情況,從而優化開溝器結構參數,并考慮到土壤顆粒具有一定的離散性,且水田土壤顆粒在機械部件工作過程中動態變化,本文采用離散元法描述水田土壤模型及其在機械部件作用下的動態變化過程,應用EDEM 軟件對滑刀式開溝器進行離散元仿真優化。
1.3.1 水田土壤粒子離散元仿真模型
針對水田的流變特性,測量堆積角會存在較大誤差,本文利用EDEM 測量物料堆積角經典方法(抽板法),結合塌落度試驗測量水田土壤的塌落度和塌落拓展度,從而進行水田土壤離散元模型參數標定。
廣東省的水田土壤類型以砂質黏土為主,故本文仿真試驗中的研究對象選砂質黏土,粒徑尺寸為微米級,在EDEM 環境中,將水田土壤仿真顆粒半徑設為1 mm;選擇Hertz-Mindlin with JKR 接觸模型描述水田土壤顆粒之間的相互作用,模型中表面能為0.073 J/m2;選擇Hertz-Mindlin 無滑移接觸模型描述水田土壤顆粒與鋼材之間的相互作用;顆粒工廠的顆粒生成方式設置為隨機生成,且實際顆粒半徑為基礎半徑的0.8~1.5 倍。根據相關文獻[25]和EDEM 顆粒材料數據庫(GEMM 數據庫)確定水田土壤顆粒模型參數,如表1 所示。
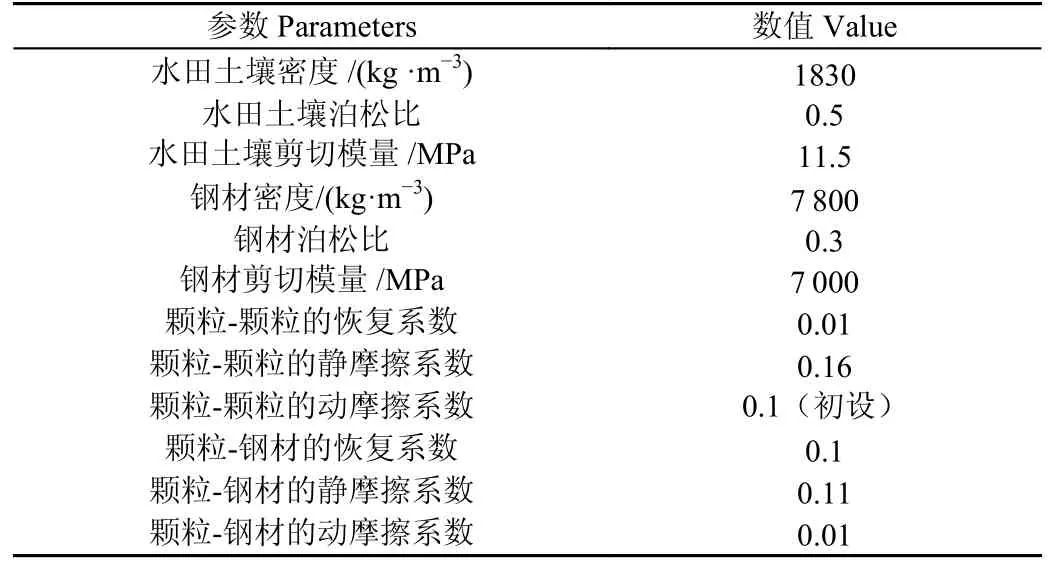
表1 水田土壤顆粒仿真參數Table 1 Simulation parameters of soil particles in paddy fields
1.3.2 仿真模型建立和土壤顆粒參數修正
仿真計算時,根據水田實際作業環境(秧苗間距為300 mm),結合滑刀式開溝器實際尺寸、作業深度、寬度等,在EDEM 軟件中建立長×寬×高為500 mm×300 mm×200 mm 的小型土槽模型,底面材料設定為鋼。將SolidWorks 軟件繪制的滑刀式開溝器三維模型導入EDEM 前處理器中,生成滑刀式開溝器和水田土壤離散元仿真模型,如圖7 所示。

圖7 滑刀式開溝器和水田土壤離散元仿真模型Fig.7 Discrete element simulation model of sliding-knife furrow opener and paddy soils
仿真時,待土壤顆粒充滿鋼板盒,設置一側面擋板以0.05 m/s(與實際塌落度試驗抽板速度一致)的速度緩慢均勻提升,使水田土壤顆粒依靠重力塌落、擴散,直至顆粒速度不再發生變化時停止仿真,仿真結果如圖8a 所示。
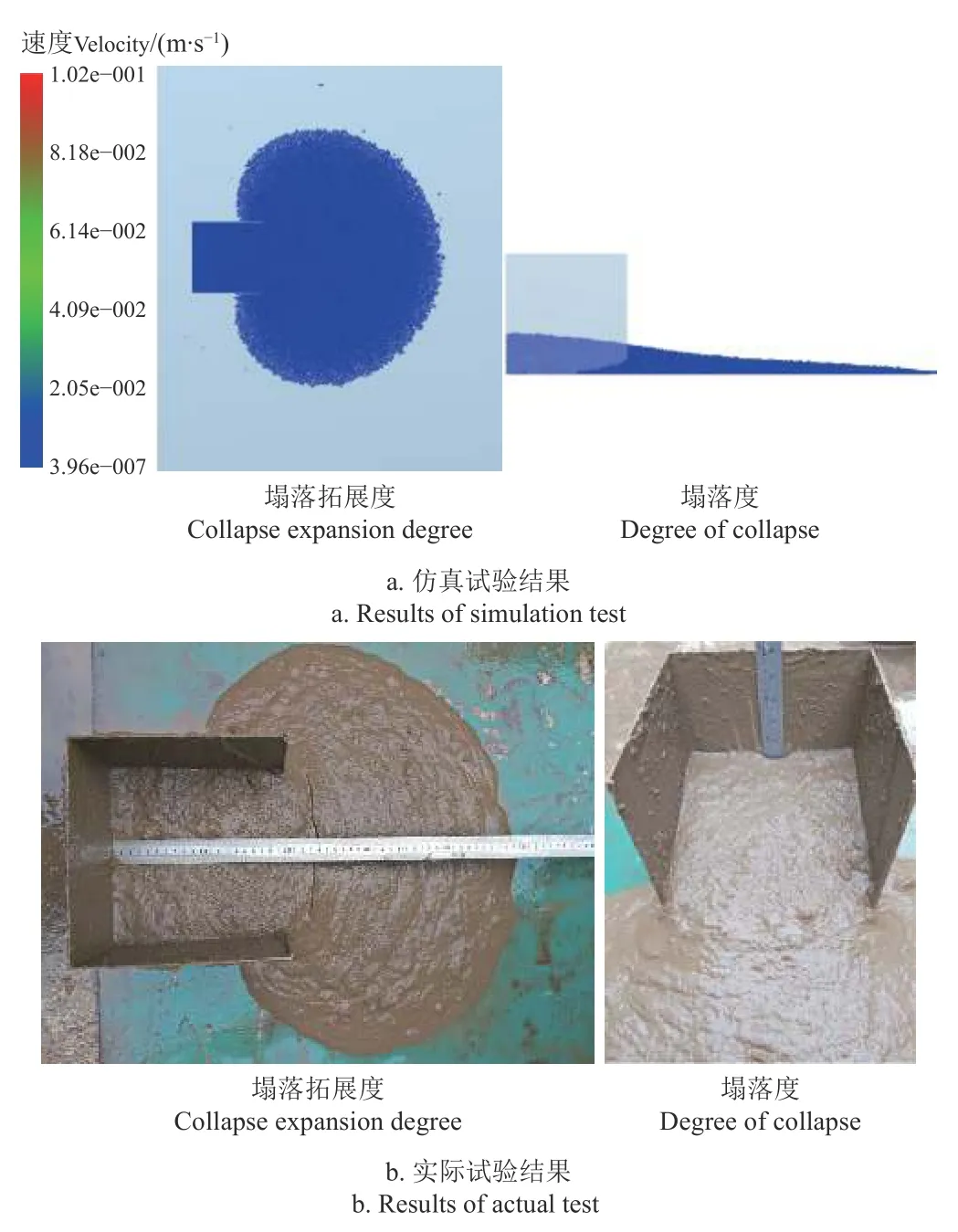
圖8 水田土壤塌落度試驗Fig.8 Collapse test of paddy soils
為驗證仿真結果,進行水田土壤實際塌落度試驗,試驗結果如圖8b 所示,塌落度為96.7 mm,塌落拓展度為530.5 mm。通過不斷修正水田土壤顆粒之間的動摩擦系數到0.02,仿真試驗塌落度為101.3 mm,塌落拓展度為543.6 mm。試驗結果與仿真結果的塌落度、塌落拓展度數值相對誤差為4.5%和2.4%,誤差小于5%,模型可一定程度上描述實際水田土壤流變特性。
1.4 仿真試驗
本文主要針對水稻側深施基肥和追施分蘗肥進行研究,結合水稻農藝要求,水稻在生長初期側深施基肥深度為30~50 mm,分蘗期追施分蘗肥深度為50~80 mm;水田環境要求開溝器具有牽引阻力小、土壤擾動少的特征。因此,在離散元仿真試驗中,以滑刀式開溝器結構參數滑切角、刃口角、入土深度為試驗因素,以滑刀式開溝器的牽引阻力、土壤擾動面積為試驗指標,進行三因素三水平正交仿真試驗。考慮到施肥時水稻的生長情況及田間動力機械作業速度,側深施基肥時滑刀式開溝器前進速度設為1.2 m/s,追施分蘗肥時設為0.6 m/s,仿真試驗因素及水平設置表如表2 所示。

表2 滑刀式開溝器離散元仿真試驗因素與水平表Table 2 Table of factors and levels for discrete element simulation tests of sliding-knife furrow opener
1.5 土槽試驗
1.5.1 氣力引射式霧化施肥器性能試驗
為優化氣力引射式施肥器結構參數喉嘴距、混合室(喉部)直徑以及工作參數(氣體壓力),并研究這些參數對排肥量(液肥質量流率)和耗氣量(氣體流量)的影響規律,進行氣力引射式霧化施肥器性能試驗。試驗以喉嘴距、混合室(喉部)直徑、氣體壓力為試驗因素,以液肥質量流率和氣體流量為試驗指標,進行全因素試驗,試驗因素及水平表如表3 所示。

表3 氣力引射式霧化施肥器性能試驗因素與水平表Table 3 Table of factors and levels for performance tests of pneumatic ejector fertilizer atomizer
氣力引射式霧化施肥器性能試驗在華南農業大學工程學院進行,測試平臺如圖9 所示。試驗時,將空壓機的排氣口通過輸氣管連接到氣力引射式霧化施肥器上方的中央進氣接口,將吸肥管一端放置在液肥箱內,另一端連接在氣力引射式霧化施肥器側面液肥進口上。
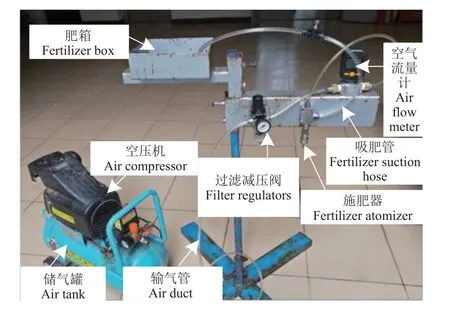
圖9 氣力引射式霧化施肥器試驗平臺Fig.9 Test platform for pneumatic ejector fertilizer atomizer
為達到農藝要求施肥量,氣力引射式霧化施肥器的液肥質量流率應與田間動力機械前進速度相匹配,田間動力機械前進速度較快時要求氣力引射式霧化施肥器有較大排肥量,速度較慢時則相反。本文將氣力引射式霧化施肥器安裝于井關PZ60 型插秧機,其前進速度約為0.6~1.2 m/s,以氮肥為例,水稻農藝要求最大需純氮量為90 kg/hm2,根據式(5)計算得到氣力引射式霧化施肥器最大液肥質量流率需達10.13 g/s。
式中q為液肥質量流率,g/s;K為氣力引射式霧化施肥器作業行距(一般為0.3 m),m;v為田間動力機械前進速度,m/s;Q為水稻純氮施用量,kg/hm2;ω為液體氮肥的氮素質量分數,%(本文氮素質量分數為32%)。
液肥質量流率定義為單位時間內吸肥口所卷吸的液肥質量。使用電子天平(精度0.1 g)稱量并記錄裝有液肥肥箱的起始質量m1;啟動恒壓供氣系統,壓力穩定后,將吸肥管一端插入肥箱中,同時用秒表開始計時,計時t(s)結束,取出吸肥管,稱量并記錄肥箱終止質量m2,計算液肥質量流率q,如式(6)所示。每組試驗計時3 min,3 次重復,然后計算3 次平均液肥質量流率。
1.5.2 滑刀式開溝器性能試驗
滑刀式開溝器性能試驗的目的是通過試驗獲得滑刀式開溝器實際牽引阻力,驗證離散元仿真分析結果的準確性,同時探究滑刀式開溝器不同工作參數對其作業性能的影響。試驗在華南農業大學工程學院進行。采用長條形土槽試驗臺,主要由不銹鋼土槽、機架、軌道、臺架、動力裝置、傳動裝置、行走裝置、測試系統、控制系統等組成,其中不銹鋼土槽和機架底部安裝有萬向輪,能夠方便移動試驗臺安放位置,整個土槽試驗臺尺寸長×寬×高為 3000 mm×800 mm×500 mm,如圖10 所示。稻耕土取自廣東省江門市新會區崖門鎮,土壤類型為砂質黏土,沙(顆粒直徑為0.02~2 mm)量占比為76.78%~79.62%,淤泥(顆粒直徑為0.002~0.02 mm)量占比為25.49%~27.3%,黏土(顆粒直徑為<0.002 mm)量占比為0.62%~1.09%。
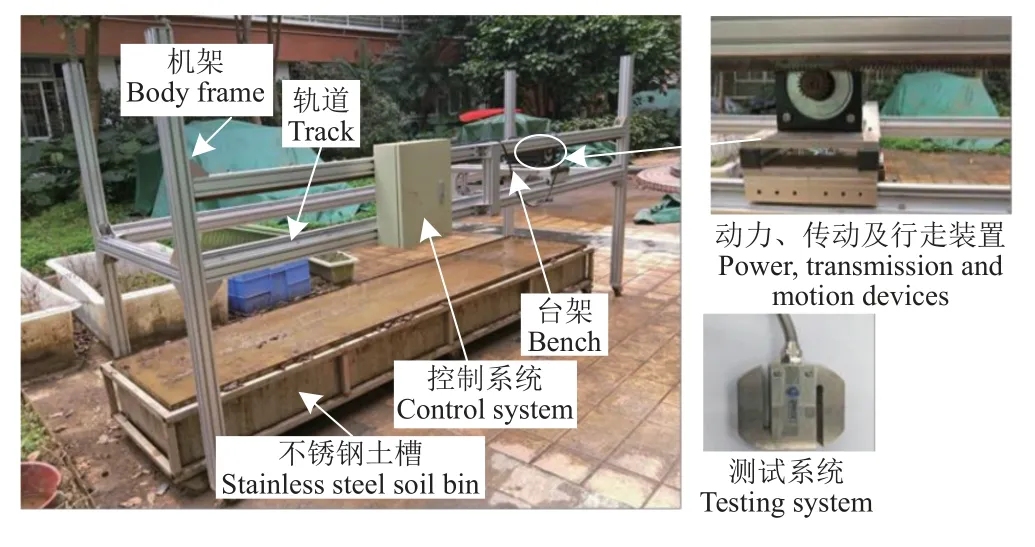
圖10 土槽結構和組成Fig.10 Structure and composition of soil bin
土槽內裝填稻耕土,用以模擬水田土壤環境,試驗前對土壤進行泡水處理,泥漿自然沉降1 周左右,試驗時土壤表面無水層,為確保每次試驗中土壤特性的一致性,每次試驗用鏟和平地工具回收土壤。試驗時,步進電機安裝在臺架上,通過齒輪、齒條傳動實現臺架水平運動;滑刀式開溝器和臺架之間連接測力傳感器,利用電腦程序實時讀取滑刀式開溝器牽引阻力數值;通過調整滑刀式開溝器安裝高度實現入土深度調節,用以模擬滑刀式開溝器田間工作過程。
“危急值管理”是南大一附院近年來的工作亮點之一:根據科室不同,制定個性化的危急值范圍;建立信息系統-檢驗人員-護士-醫師-管理者的危急值管理閉環;危急值系統與病歷系統對接,直接生成危急值相關病程記錄;臨床科室與護理部、信息處、檢驗科等科室也形成了聯動機制。“早在2009年,醫院就進行了危急值監管。”
根據離散元仿真設計結果,試驗采用滑切角32.5°、刃口角45°的滑刀式開溝器,以滑刀式開溝器入土深度、前進速度為試驗因素進行全因素試驗。每組試驗進行3次重復,計算滑刀式開溝器工作過程中的平均牽引阻力,試驗因素及水平表如表4 所示。

表4 滑刀式開溝器性能試驗因素與水平表Table 4 Table of factors and levels for performance tests of sliding-knife furrow opener
1.5.3 滑刀開溝-氣力引射式液肥霧化側深施肥裝置性能試驗
為研究滑刀開溝-氣力引射式液肥霧化側深施肥裝置的作業性能,將氣力引射式霧化施肥器與滑刀式開溝器進行組合并開展土槽試驗,主要試驗指標為作業過程中裝置的排肥量穩定性與施肥深度。
采用前述土槽試驗臺進行裝置的開溝、施肥作業,試驗工具有量杯、直尺、秒表、稱重器、氮肥和黑色顏料。在保證供氣壓力為0.3 MPa 的情況下,分別檢測施肥裝置入土深度為30 mm,前進速度為1.2 m/s 和入土深度為50 mm,前進速度為0.6 m/s 時的排肥量穩定性和施肥深度。
排肥量穩定性試驗:施肥帶長度設定為2.4 m,用秒表記錄施肥時間,用稱重器測量施肥量,重復6 次,計算每次單位時間內的施肥量。
施肥深度試驗:選取3 條施肥帶,每條施肥帶長度設定為2.4 m,取20 cm 為一段,在每段中隨機取一點用直尺測量施肥深度,分別計算每條施肥帶的平均施肥深度。
2 結果與分析
2.1 滑刀式開溝器離散元仿真試驗結果與分析
通過EDEM 后處理器獲得滑刀式開溝器牽引阻力、土壤擾動面積的數值,應用加權評分算法計算出各個因素組合的綜合加權評分,以綜合加權評分的高低判定滑刀式開溝器綜合工作性能的優劣,根據離散元仿真結果分析各因素對滑刀式開溝器作業性能的影響,從而優化滑刀式開溝器結構參數。
EDEM 后處理器Analyst 獲取的滑刀式開溝器的牽引阻力試驗數據如圖11 所示。從圖11 可見,隨著仿真時間推移,牽引阻力從0 呈線性逐漸增加,增加到一定值后趨于穩定,穩定一段時間后,牽引阻力急劇減小到0。這是由于開始時,滑刀式開溝器與土壤顆粒沒有相互作用,牽引阻力為0;隨著滑刀式開溝器前進,滑刀式開溝器與土壤顆粒的作用面積逐漸增大,牽引阻力也隨之增大;當滑刀式開溝器完全進入土壤后,滑刀式開溝器與土壤顆粒的作用面積一定,牽引阻力趨于穩定;滑刀式開溝器離開土壤時,滑刀式開溝器與土壤顆粒的作用面積很快減少,直至無作用,牽引阻力逐漸降為0。統計圖11 中較為穩定的數據,并計算其平均值,結果如表5 所示。
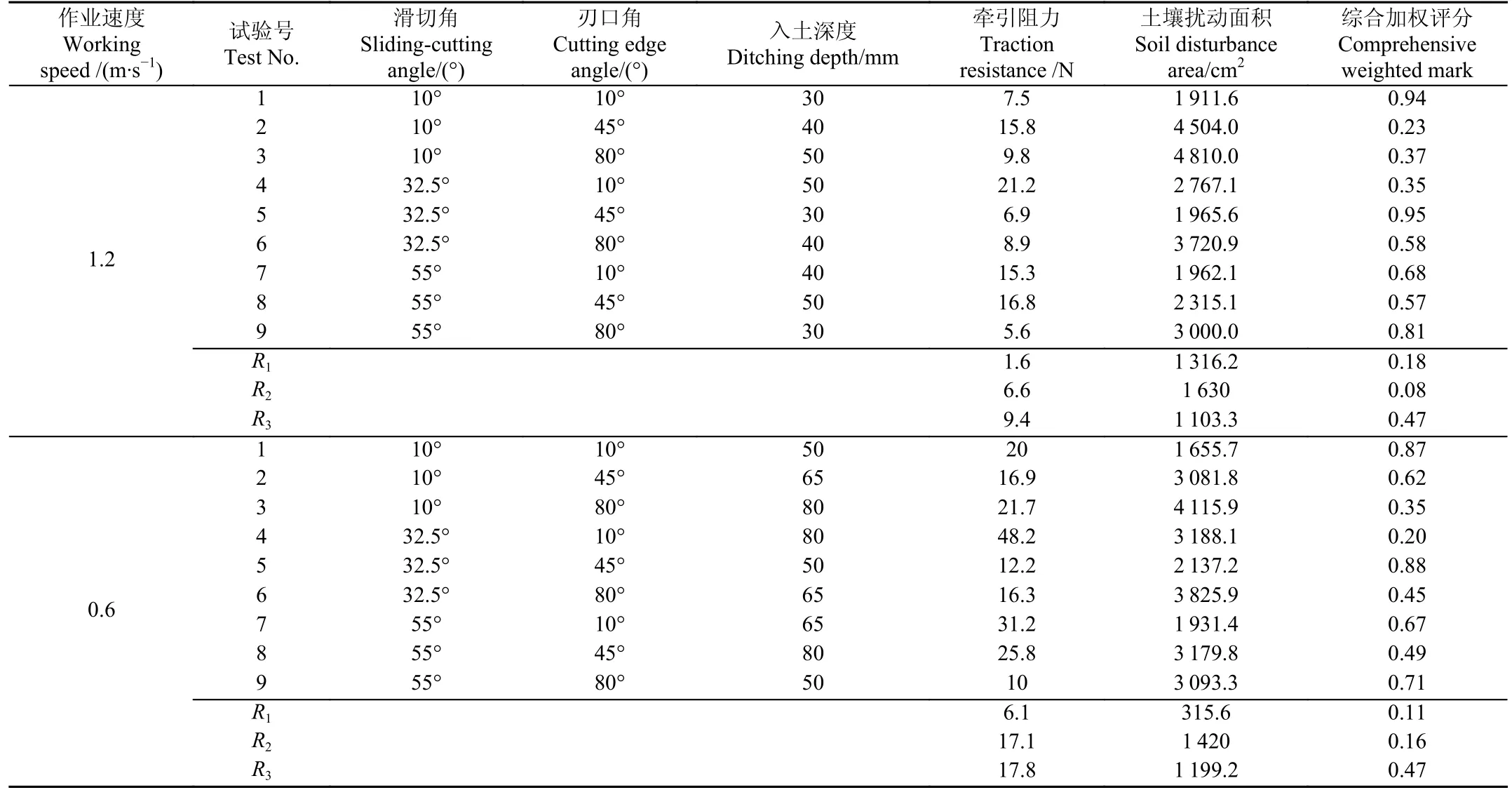
表5 滑刀式開溝器離散元仿真試驗數據表Table 5 Discrete element simulation test data table for sliding-knife furrow opener
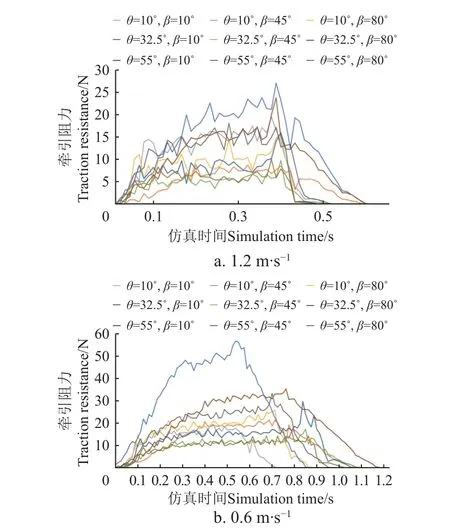
圖11 滑刀式開溝器牽引阻力-仿真時間曲線Fig.11 Curve for traction resistance and simulation time of sliding-knife furrow opener
設速度大于0.1 m/s 的土壤顆粒為被擾動土壤,定義滑刀式開溝器最大寬度入土時其截面上土壤的擾動量為土壤擾動面積。在離散元仿真結果后處理中對仿真模型進行切片處理,將水田土壤顆粒群依據速度大小進行著色處理,藍色為速度較低的顆粒、綠色為速度較高的顆粒、紅色為速度最高的顆粒,離散元仿真結果如圖12 所示。將各工況下的離散元仿真結果輸出成尺寸、分辨率一致的圖片,導入Photoshop,統計圖中綠色和紅色部分像素數值,以此來計算水田土壤擾動面積,結果如表5所示。采用模糊數學中的映射函數對滑刀式開溝器的牽引阻力、土壤擾動面積兩指標進行極差分析處理,并結合加權評分方法[26]對兩個指標進行綜合評價,兩項指標均采用降半正態分布映射,計算式如式(7)~(9)所示,結果見表5 所示。
采用 SPSS(statistical product service solutions,SPSS)軟件對滑刀式開溝器工作在1.2 m/s 速度的離散元仿真試驗數據進行極差分析(表5)。由極差可知:1.2 m/s 的前進速度下,滑切角、刃口角、入土深度三個因素對牽引阻力、土壤擾動面積和綜合加權評分的影響主次順序為入土深度、刃口角、滑切角;刃口角、滑切角、入土深度;入土深度、滑切角、刃口角。由試驗結果可知,牽引阻力隨著滑切角和入土深度的增加而增大,隨著刃口角的增加而減小;土壤擾動面積隨著滑切角的增加而減小,隨著刃口角的增加而增大,隨著入土深度增加呈現先增大后減小的趨勢;綜合加權評分隨著滑切角增加而上升,隨著刃口角增加呈現先下降后上升趨勢,隨著入土深度增加而下降。以綜合加權評分評價滑刀式開溝器的工作性能,綜合加權評分最高的因素組合為滑切角32.5°、刃口角45°,在滿足農藝要求情況下入土深度越淺越有較好的工作性能。
0.6m/s 速度下的結果極差分析滑切角、刃口角、入土深度對牽引阻力、土壤擾動面積、綜合加權評分的影響主次順序為入土深度、刃口角、滑切角;刃口角、入土深度、滑切角;入土深度、刃口角、滑切角。由試驗結果可知,牽引阻力隨著滑切角的增加呈現先增大后減小的趨勢,隨著刃口角的增加而減小,隨著入土深度的增加而增大;土壤擾動面積隨著滑切角的增加同樣呈現先增大后減小的趨勢,隨著刃口角和入土深度的增加而增大;綜合加權評分隨著滑切角的增加呈現先下降后上升的趨勢,隨著刃口角的增加呈現先上升后下降的趨勢,隨著入土深度的增加而下降。以綜合加權評分評價滑刀式開溝器的工作性能,綜合加權評分最高的因素組合為滑切角32.5°、刃口角45°,在滿足農藝要求的情況下入土深度越淺越有較好的工作性能。
2.2 土槽試驗結果與分析
2.2.1 氣力引射式霧化施肥器性能測試結果
氣力引射式霧化施肥器性能試驗結果如表6 所示,可知在喉嘴距1 mm、混合室(喉部)直徑3.5 mm、氣體壓力0.3 MPa 時有最大排肥量11.26 g/s,滿足水稻施肥農藝要求。

表6 氣力引射式霧化施肥器性能試驗結果Table 6 Performance test results of pneumatic ejector fertilizer atomizer
由表6 極差分析結果可知:影響氣力引射式霧化施肥器液肥質量流率的主次順序為混合室(喉部)直徑、氣體壓力、喉嘴距;影響氣力引射式施肥器氣體流量的主次順序為氣體壓力、喉嘴距、混合室(喉部)直徑。根據試驗數據分別繪制各因素水平與液肥質量流率和氣體流量的效應圖,如圖13 所示。由圖13a 可見,液肥質量流率隨著混合室(喉部)直徑和喉嘴距的增加呈現出先增加后下降的趨勢,隨著氣體壓力的增加而增加,當喉嘴距為1 mm,混合室(喉部)直徑為3.5 mm,氣體壓力為0.3 MPa 為最優水平組合;由圖13b 可見,氣體流量隨著氣體壓力的增加而增大,隨著喉嘴距的增加而增大,但幅度不明顯,隨著混合室(喉部)直徑的增加呈現小范圍的上下波動趨勢。

圖13 因素水平與液肥質量流率和氣體流量的效應圖Fig.13 Effect diagram of factors level versus liquid fertilizer mass flow rate and air flow rate
2.2.2 滑刀式開溝器性能試驗結果與分析
表7 為滑刀式開溝器性能試驗數據,可見滑刀式開溝器的牽引阻力隨著入土深度和前進速度的增加而增大,當入土深度為30 mm、前進速度為1.2 m/s,滑刀式開溝器實際作業過程中的牽引阻力為8.5 N,離散元仿真試驗的牽引阻力為6.9 N,相對誤差分別為18%。當入土深度為50 mm、前進速度為0.6 m/s,滑刀式開溝器實際作業過程中的牽引阻力為14.4 N,離散元仿真試驗的牽引阻力為12.2 N,相對誤差為15%。產生誤差的主要原因是實際土槽中的土壤條件與理想狀態有一定差距,以及測力傳感器的安裝位置并不能準確測量出開溝部件實際受力大小。表8 為對應的方差分析結果,由表8 可見,入土深度對牽引阻力的影響極其顯著(P<0.01),前進速度對牽引阻力的影響顯著(P<0.05),入土深度的影響大于前進速度的影響。因此,進行實際施肥作業時,應在滿足水稻施肥農藝要求的條件下,選擇較淺的施肥深度,以保證開溝器的工作性能。
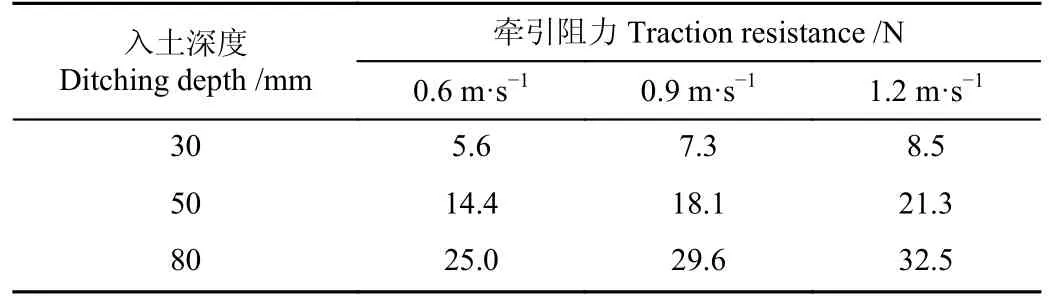
表7 不同速度下滑刀式開溝器土槽試驗結果Table 7 Soil bin test results for sliding-knife furrow opener at different speeds

表8 滑刀式開溝器土槽試驗結果方差分析表Table 8 Variance analysis table of soil bin test results for slidingknife furrow opener
2.2.3 滑刀開溝-氣力引射式液肥霧化側深施肥裝置性能試驗結果與分析
表9 為滑刀開溝-氣力引射式液肥霧化側深施肥裝置的排肥量穩定性和施肥深度試驗數據表。由表9 可知,在入土深度為30 mm、前進速度為1.2 m/s 及入土深度為50 mm、前進速度為0.6 m/s 時,排肥量分別為11.1 和11.5 g/s,標準差分別為0.242 7 和0.479 6 g/s,與最大排肥量11.26 g/s 相比,相對誤差分別為1.42%和2.13%,排肥量均維持穩定,并能達到最大值,滿足施肥要求。在入土深度為30 mm,前進速度為1.2 m/s 時,施肥深度為28.7 mm,相對誤差為4.4% ;在入土深度為50 mm,前進速度為0.6 m/s 時,施肥深度為48.9mm,相對誤差為2.1%,施肥深度均滿足施肥要求。可見,該裝置的各項指標滿足水稻液肥側深施肥作業要求。
3 結論
1)設計了氣液同軸結構的氣力引射式霧化施肥器,采用全因子試驗法進行氣力引射式霧化施肥器性能試驗。結果表明:影響液肥質量流率的主次順序為混合室(喉部)直徑、氣體壓力、喉嘴距;影響氣體流量的主次順序為氣體壓力、喉嘴距、混合室(喉部)直徑。當喉嘴距為1 mm、混合室(喉部)直徑為3.5 mm、氣體壓力為0.3 MPa,耗氣量為24 L/min 時,氣力引射式霧化施肥器有最大排肥量11.26 g/s,滿足水稻施肥的農藝要求。
2)結合水田土壤的流變特性,設計與氣力引射式霧化施肥器相配合的滑刀式開溝器,用EDEM 軟件對不同結構參數的滑刀式開溝器進行作業過程離散元仿真分析,仿真試驗結果表明:當滑刀式開溝器以1.2 m/s 的前進速度作業時,滑切角、刃口角、入土深度對牽引阻力、土壤擾動面積和綜合加權評分的影響主次順序分別為入土深度、刃口角、滑切角;刃口角、滑切角、入土深度;入土深度、滑切角、刃口角。以0.6 m/s 的前進速度作業時,滑切角、刃口角、入土深度對牽引阻力、土壤擾動面積、綜合加權評分的影響主次順序分別為入土深度、刃口角、滑切角;刃口角、入土深度、滑切角;入土深度、刃口角、滑切角。在滿足水稻施肥農藝要求的情況下,滑切角為32.5°、刃口角為45°,滑刀式開溝器有較好的工作性能。
3)以EDEM 軟件進行離散元仿真分析優化出的滑刀式開溝器為研究對象,進行仿真試驗和土槽性能試驗。試驗結果表明:滑刀式開溝器的牽引阻力隨著入土深度和前進速度的增加而增大。當滑刀式開溝器入土深度為30 mm、前進速度為1.2 m/s 時,牽引阻力實測值為8.5 N,仿真結果為6.9 N,相對誤差為18%,土壤擾動面積仿真結果為 1 965.6 cm2;當入土深度為50 mm、前進速度為0.6 m/s 時,牽引阻力實測值為14.4 N,仿真結果為12.2 N,相對誤差為15%,土壤擾動面積仿真結果為2 137.2 cm2。說明應用EDEM 軟件進行滑刀式開溝器離散元仿真優化設計的可行性。
4)進行了滑刀開溝-氣力引射式液肥霧化側深施肥裝置土槽性能試驗,在入土深度為30 mm,前進速度為1.2 m/s 時,排肥量標準差為0.242 7 g/s,排肥量相對誤差為1.42%,施肥深度相對誤差為4.4% ;在入土深度為50 mm,前進速度為0.6 m/s 時,排肥量標準差為0.479 6 g/s,排肥量相對誤差為2.13%,施肥深度相對誤差為2.1%。各項指標滿足水稻液肥側深施肥作業要求。
猜你喜歡
中學生數理化·七年級數學人教版(2022年6期)2022-06-05 06:50:50
快樂學習報·教育周刊(2022年16期)2022-05-01 21:25:05
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設與管理(2015年15期)2015-03-20 15:18:57