基于工業傳感器的刀閘位置雙確認技術分析及優化
2023-11-25 03:28:34鄧志雄
農村電氣化 2023年10期
鄧志雄
(廣東電網有限責任公司梅州供電局,廣東 梅州 514000)
隨著調控一體化操作模式的普及,遠方遙控刀閘是否分合到位成為保障電網安全穩定運行的關鍵所在。為解決調控一體化目標模式下刀閘位置雙確認技術問題,實現在原有刀閘機構位置節點信號基礎上,通過刀閘位置遠方輔助識別技術新增第二輔助判據,但因刀閘位置雙確認技術還在起步應用階段,現場安裝施工方案還存在諸多問題,須從運行專業角度出發不斷優化方案。以及隨著調控一體化衍生出遠方操作的風險,運行人員將面對新的挑戰。
1 研究現狀分析
為了實現對刀閘分合狀態的自動檢測,刀閘位置雙確認技術指用2個或2個以上的狀態判據同時發生對應變化來確認刀閘已分閘或合閘到位,一般分為刀閘分合閘位置主要判據和輔助判據。通過增加工業傳感器(含金屬接近傳感器、微動開關、姿態傳感器等),采集傳感器輸出的電氣信號,經內部邏輯處理后,轉化為用于指示刀閘分合閘狀態的硬接點信號作為刀閘分合閘位置雙確認判據[1-2]。
本文通過對刀閘位置雙確認技術應用情況的調查分析,發現能采用方法有多種,且不同設備、不同現場環境可采用的方法也不相同,表1給出了主流各類工業傳感器優缺點分析。當變電站刀閘逐步應用第二判據以后,對運行人員及工作模式帶來新的變化和挑戰。
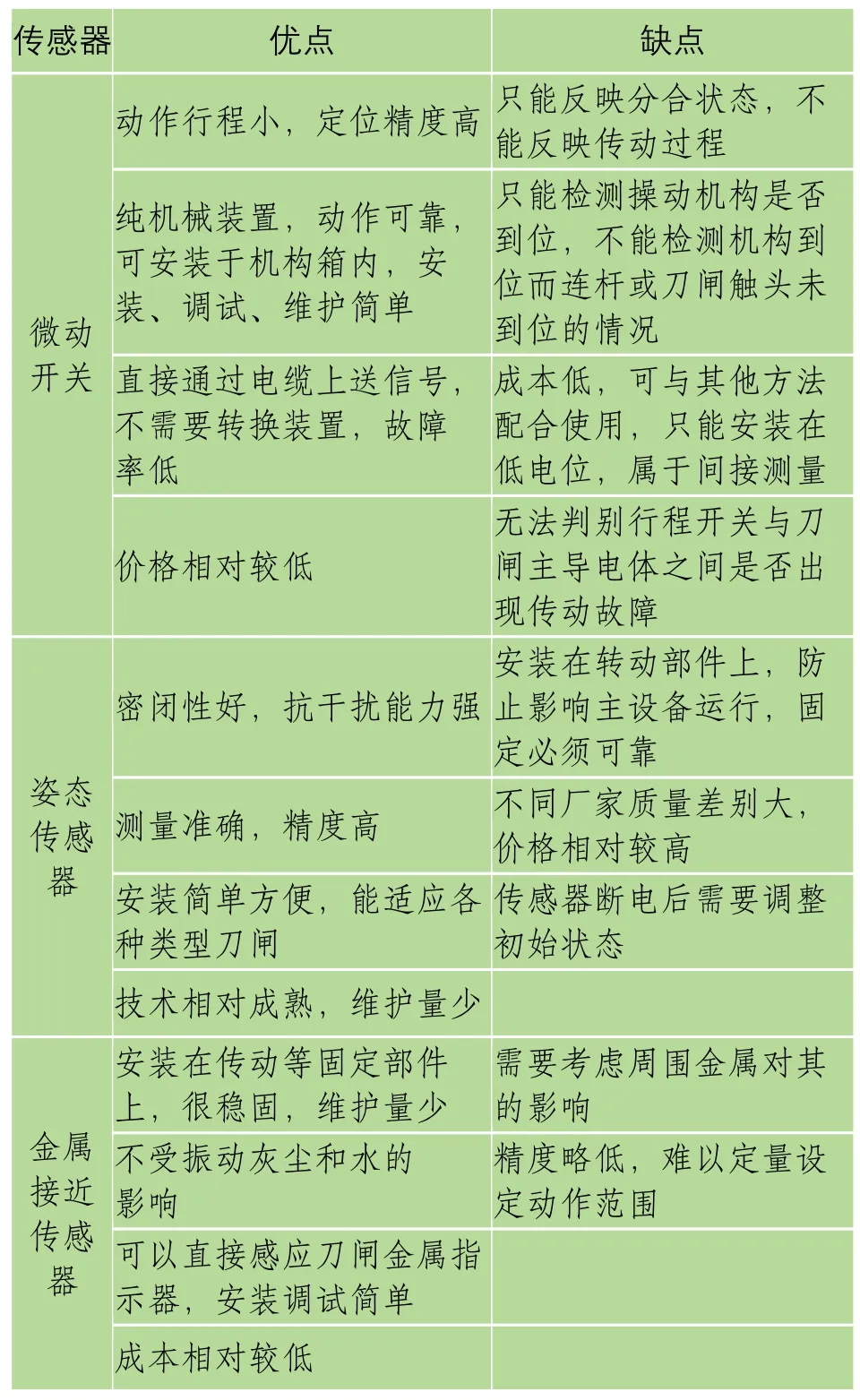
表1 各類傳感器優缺點分析
2 刀閘位置雙確認技術案例問題分析及優化方案
2.1 安裝調試階段
運行人員在驗收某站220 kV刀閘位置傳感器安裝,進行刀閘第二判據實操對位調試時,發現傳感器變位受阻,刀閘、地刀部件誤碰傳感器或其附件,使其不能正確變位甚至受損的問題,如圖1所示。

圖1 刀閘位置傳感器變位受阻
優化方案如下。
保持傳感器安裝底座平面與刀閘的旋轉平面的一致性,且固定必須可靠,防止因振動移位。在強電場、強磁場、強振動的工況下,傳感器為保證精確檢測刀閘角度及防止其他金屬對電磁感應原理傳感器造成影響,應選擇正確的安裝方式及位置。
安裝傳感器時,必須考慮好刀閘、地刀相關部件的運動軌跡,避免傳感器與其發生接觸,難以判斷時,可以結合工作采用手搖刀閘、地刀慢合、慢分進行觀察判斷。
金屬感應片到傳感器的距離影響傳感器的動作,因此在安裝前應計算好距離,制作滿足要求的固定扣,同時金屬感應片的安裝不能影響刀閘的轉動部分。
傳感器的固定扣應采用硬度高、不宜變形的材料制作,防止固定扣變形導致傳感器移位,影響判別精度。
運行人員在驗收某站220 kV加裝刀閘位置雙確認裝置時,發現傳感器安裝在刀閘主傳動桿上,而非經副連桿傳動的刀閘末端相。傳感器的電纜在刀閘底座等位置布置走線時,未明確具體固定要求,出現電纜晃動、下垂過多等問題,如圖2所示。

圖2 電纜晃動、下垂
優化方案如下。
傳感器安裝在刀閘連桿上時,結合刀閘結構,傳感器應牢固安裝于刀閘相應旋轉部件上,優先安裝在刀閘傳動機構末級。安裝位置應能準確檢測到刀閘的分合閘位置變化,可靠、有效地判斷刀閘本體所處的分合閘位置狀態,包括分閘到位、合閘到位、分閘異常或合閘異常。
要求設計及廠家明確固定電纜用輔助材料和要求,如圖3所示,如U型夾、不銹鋼抱箍、不銹鋼扎帶、不銹鋼螺絲、固定間距等。

圖3 固定電纜的U型夾
運行人員在驗收某新站220 kV垂直伸縮式刀閘加裝刀閘位置雙確認裝置時,發現刀閘動靜觸頭發生偏離,未完全對準,但刀閘傳動機構和連桿已達到行程,如圖4所示。若無人在現場檢查確認,調度則因一鍵順控操作執行下一步操作甚至合開關。

圖4 垂直伸縮式刀閘觸頭偏移
優化方案如下。
刀閘傳動機構和連桿到位,但觸頭不到位情況的刀閘,因較難檢測這種異常,因此建議此類刀閘不納入一鍵順控操作。如果必須納入,建議操作時增加由人員現場檢查或通過攝像頭、無人機遠程查看進行確認[3]。
采用視頻圖像識別技術路線,通過視頻及智能分析技術實現刀閘位置的輔助判斷。
2.2 設備運維階段
運行人員在巡視檢查某站500 kV刀閘第二判據遙信信息時,發現圖紙信號錯誤,如圖5所示,刀閘第二判據測控遙信開入的分位、合位信號與刀閘位置識別裝置的輸出信號取反。現場二次標簽混亂,廠家裝置處的硬接點排序是“分、合、異常”,而接入測控的順序則是“合、分、異常”。因無前期設備標識可參考,施工單位對新增的二次標簽命名無所適從,驗收時出現混亂的標識命名,同時若未關注傳感器的固定、指示標識,將對后續維護工作造成不便。
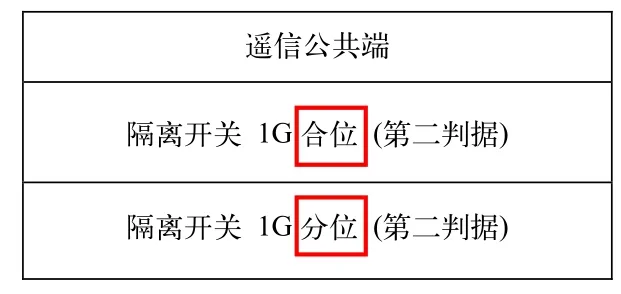
圖5 圖紙刀閘分合位遙信錯誤
優化方案如下。
廠家在白圖上注明分位、合位信號的端子排序,設計根據廠家注明的信號端子排序正確設計開入到測控的信號命名,防止后臺、調度的位置信號與現場實際取反,避免不必要的改圖、改接線、反復修改后臺及遠動信號、調度信號等工作;
重點關注傳感器及其定位等標識,提前與施工單位進行命名、標識溝通。建議對傳感器固定位置、指示位置等增加標記,如圖6所示,以便觀察傳感器有無移位、幫助傳感器維護后的準確定位而無須再次動刀閘調試。

圖6 傳感器固定位置標記
對于不確定投運日期或投運日期較久的備用間隔,建議先不安裝第二判據的傳感器。因為傳感器安裝方便快速,且電子產品更新迭代較快,可以投產前再進行安裝。
3 刀閘位置雙確認技術下操作風險及管控
3.1 刀閘實際操作不到位
根據運行經驗,敞開式刀閘不能分合閘到位的故障概率相對較高,在這種狀態下同時刀閘雙位置功能同時失效,刀閘操作不到位,給運行設備留下嚴重安全隱患。在極端情況下,如果刀閘處于半合位狀態時合上開關,則刀閘動靜觸頭放電,導致刀閘燒損或故障跳閘,擴大事故范圍。
預控措施如下。
提升設備運行質量。做好設備維護,運行維護中發現影響刀閘操作的缺陷,生產系統中填報后,同步輸出至調度端,由調度員掛牌提示,缺陷未消除前避免操作此刀閘。
遠程巡視敞開式變電站。調度遠方操作后,可采用無人機、攝像頭遠程巡視,確認操作到位,室內變電站可采用攝像頭遠程巡視,確認操作到位。
傳感器安裝完畢后必須經過反復調試,對刀閘在各種狀態下均驗證可靠性,經過試用期合格后才能正式投入使用。
3.2 防誤操技防手段轉換
傳統運行人員就地操作,采用技防手段“五防系統 + 電氣聯鎖”。調度遠方操作后技防手段轉為“間隔五防 + 電氣聯鎖”,而部分老舊站點測控間隔五防不完善。
預控措施如下。
完善變電站測控間隔五防邏輯。
嚴格驗收設備“間隔‘五防’ + 電氣‘五防’”,正反邏輯反復效驗多次,保證“五防”正確性。
新增二次設備遠方遙控防誤閉鎖系統,使程序化操作應用具備對二次設備的防誤閉鎖與狀態校驗等功能。
3.3 刀閘操作異常的應急處置
調度員在進行設備遙控操作時,存在遙控失敗、操作失敗等異常情況風險。調度遠方操作時刀閘未操作到位時突發故障,現場刀閘拉弧。
預控措施如下。
制定刀閘遙控操作不到位異常應急處置方案,并做好宣貫、演練。
刀閘遙控操作異常時調度員應立即停止遙控操作,并加強該間隔的信號監視,通知運行人員檢查處理。
重點關注刀閘遙控操作不到位的情況,調度員能進入變電站視頻監控系統,發現刀閘拉弧及時做出應對措施,提高緊急故障處置速度。
運行人員接通知后,一組人前往現場,一組人通過遠程攝像頭、無人機、調度自動化系統初步判斷異常情況,快速應急響應。
4 結束語
調控一體化是變電智能運維體系建設的重要一環,而刀閘雙確認技術則是關鍵重要環節,其可靠與否直接影響調度遠方判斷刀閘位置是否準確可靠,電網是否正常運行,應當引起足夠的重視。本文所述為目前所遇到的案例問題及參考優化方案,值得在電網系統內借鑒。不同類型、廠家的設備問題不一,解決思路和方法也不一,具體問題還應具體分析和解決。在實際工作中,運行專業應積極與檢修專業溝通協調施工方案是否恰當,圖紙是否正確等,防止出現刀閘分合不到位的情況,保障電網安全穩定運行。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
工業設計(2016年12期)2016-04-16 02:52:00
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
設備管理與維修(2015年12期)2015-04-09 06:57:00