基于方向預測規則化的建筑物輪廓線提取算法
2023-11-23 12:13:22王安琪
常州工學院學報 2023年5期
關鍵詞:方向
王安琪
(大連財經學院管理學院,遼寧 大連 116600)
0 引言
三維城市重建的主要信息是建筑物,三維城市重建的重要步驟是建筑物輪廓線提取[1]。地圖更新與城市重建等領域均離不開建筑物輪廓信息。因此,建筑物輪廓線提取至關重要[2]。傳統的基于影像的建筑物輪廓線提取方法易受地面物體影響,導致輪廓線提取精度與效率降低。為此,設計高精度、高效率的建筑物輪廓線提取算法屬于目前的研究熱點。國內外相關領域的學者紛紛對建筑物輪廓線提取算法進行了研究。
Che等[3]提出了基于傾斜攝影數據的單體三維建筑輪廓線提取算法,將傾斜攝影模型的點云劃分為虛擬網格,并將每個虛擬網格中的點云視為一個整體,通過設置高度差來提取建筑立面的點云,將網格的最高點和最低點之間的高度差與高度差閾值進行比較,消除網格中所有不符合要求的點云,對建筑立面的點云進行分類,并通過分類的點云提取輪廓線。該方法可用于從大量傾斜攝影數據中獲得單個三維建筑模型,建筑物輪廓線提取效率較高,但提取精度較差。Zhu等[4]提出基于自適應多邊形生成算法的建筑物自動提取方法。該方法旨在直接生成建筑頂點序列,以勾勒出每個建筑實例的輪廓。利用自適應多邊形生成算法預測建筑頂點的候選位置,并通過建筑邊界的位置和方向確定這些頂點的排列,以細化它們的位置。該算法提取建筑物輪廓線的精度較好,但步驟較多,提取效率較差。朱軍桃等[5]先塑造建筑物點云網孔,初步提取邊緣點云,再通過改進卷包裹算法,在初步提取的邊緣點云內提取角點,按照角點二次提取邊緣點云,最后通過最小二乘擬合方法,擬合二次提取邊緣點云連接形成的輪廓線,得到最終的建筑物輪廓線提取結果。該算法具備較優的建筑物輪廓線提取效果,提取效率較快。但該算法在提取角點時,容易出現錯提問題,導致輪廓線位置偏移,降低建筑物輪廓線提取精度。徐景中等[6]通過建筑物點云構建建筑物虛擬網格,利用鄰域分析法標記建筑物邊界格網,基于方向的單邊緣格網抑制法,按照標記結果提取輪廓點,通過最小二乘擬合方法擬合輪廓點,提取建筑物輪廓線。該算法提取的輪廓線較為精準,且提取速度較快。但該算法在構建建筑物虛擬網格時,會出現部分建筑物邊界點被遮擋的情況,導致輪廓線提取完整性較差。
方向預測規則化算法具備較優的規則化效果,可提升輪廓線提取精度[7]。為提升建筑物輪廓線提取的完整性和精度,本文將方向預測規則化算法應用至建筑物輪廓線提取的研究中,設計基于方向預測規則化的建筑物輪廓線提取算法,提升建筑物輪廓線提取效果。
1 建筑物輪廓線提取算法
建筑物輪廓線提取的具體步驟如下:
步驟1:由機載激光雷達采集建筑物點云數據S。


1.1 建筑物輪廓點提取

將S近似成一個平面,為此,旋轉建筑物三維點云,即旋轉建筑物點云平面[9],將其法向量旋轉到與坐標是(0,0,1)的法向量nz平行的位置。通過羅德里格旋轉公式得到旋轉矩陣Rj(α)。按照建筑物點云平面法向量n與nz,計算旋轉角α,公式如下:
(1)
利用n與nz計算旋轉軸j,公式如下:
(2)
Rj(α)的計算公式如下:
(3)
式中,(x,y,z)為旋轉建筑物三維點云任一點的坐標。
令旋轉后的建筑物點云數據集S′為:
S′=Rj(α)·S·λ
(4)
式中:λ為平滑系數;S與S′都是3×n的矩陣。
通過篩選邊界網格,可去掉無效點云,加快建筑物輪廓點提取速度,邊界網格篩選步驟如下:
步驟1:利用Rj(α)旋轉S,得到S′,在水平面內投影S′,得到二維點云。
步驟2:利用二維點云,塑造建筑物二維網格。設置合理的孔洞尺寸,可避免出現細節丟失與孔洞問題[10]。令建筑物二維網格橫縱坐標的最大、最小值為Xmax、Xmin、Ymax、Ymin,建筑物二維網格的孔洞尺寸Hsize為
(5)
式中:β為調節系數;N為建筑物點云數量。
S′內某建筑物點云G(x,y)所處網格的公式如下:
(6)
(7)
G所處行數與列數為r、c,點云G的橫縱坐標是x、y。
步驟3:篩選邊界點云,建筑物二維網格建立成功后,篩選邊界點云,即篩選邊界網格。邊界網格篩選的條件為八鄰域網格中包含空網格O。通過深度優先搜索算法篩選邊界網格,具體方式為:搜索O的八鄰域是否包含未訪問的網格,如果包含則訪問該網格,若網格不是空的,則標記成邊界網格;如果不包含,則遞歸進行該算法,以全部網格均被訪問為止,完成邊界網格篩選。
利用改進的散點輪廓算法在建筑物點云數據內提取建筑物輪廓點的具體步驟如下:
步驟1:設置滾動圓半徑γ,在建筑物邊界網格中隨機選擇點G0,G0所處網格中全部點云組建的點集是G,G0的八鄰域中全部點云組建的點集是Q。γ的計算公式為:
(8)
式中:μ為調節因子;M為某網格中點云數量;m為非空網格數量。
步驟2:求解滾動圓圓心,在Q內隨機選擇點云G1,根據G0與G1的坐標(x0,y0)、(x1,y1)以及γ,求解圓心坐標,公式如下:
(9)
通過式(9)可計算獲取‖G1‖>‖G0‖、
‖G1‖<‖G0‖兩種情況下的圓心,記作G2、G3。
步驟3:分析G0是否是邊界點,求解Q內除G0與G1以外其余點云至G2、G3的距離,如果全部點云至G2或G3的距離均超過γ,那么G0是邊界點,否則,分析Q內另一點云G1是否是邊界點,Q內除G0以外,全部點云都當成G1參與分析完成為止,如果無法分析G0是否是邊界點,那么認定G0是非邊界點。
步驟4:分析G內其余點云是否是邊界點,在G內選擇一點云G0,進行上述3個步驟,分析G內的全部點云。

1.2 建筑物輪廓關鍵點提取與輪廓線簡化
步驟1:將1.1提取的建筑物輪廓點的首尾點相連,得到一條直線L。
步驟2:求解全部建筑物輪廓點至L的距離,獲取最大的距離值Dmax,設ε為L的均值,如果Dmax>ε則剔除該線段內的點云,如果Dmax≤ε則將該線段分成兩部分。


1.3 建筑物輪廓線提取的實現


(10)
步驟1:確定獲取的簡化建筑物輪廓線的φbest,計算簡化建筑物輪廓線段編號和最佳主方向線段編號差的絕對值,如果該值是偶數,則歸類為主方向類;反之,歸類為垂直于主方向類。
步驟2:求解主方向類簡化建筑物輪廓線段的加權平均主方向,公式為
(11)
式中:簡化建筑物輪廓線段i的起止坐標是(Xstart,Ystart)、(Xstop,Ystop);gi為長度;h為簡化建筑物輪廓線段數量。
步驟3:求解與φmean正交的加權平均主方向φmean,φmean為φbest的垂直方向。
步驟5:調整建筑物輪廓線位置,公式為:
(12)

步驟6:反復操作步驟4與5,全部簡化輪廓都完成規則化為止。通過截取鄰近輪廓線交點,完成輪廓線提取。
2 實驗分析
以某小區的高層建筑物為實驗對象,該小區內共包含27棟樓,地上總建筑面積約45 869.26 m2,地下總建筑面積約3 628 m2,除最上層層高為3.0 m外,其余層的層高均為2.9 m。該小區高層建筑物屋頂共包含3種形狀,分別是簡單、規則凹與不規則凹多邊形。
利用RIEGL VQ-840-G型機載激光雷達采集該小區高層建筑物的點云數據。RIEGL VQ-840-G型機載激光雷達主要參數如表1所示。
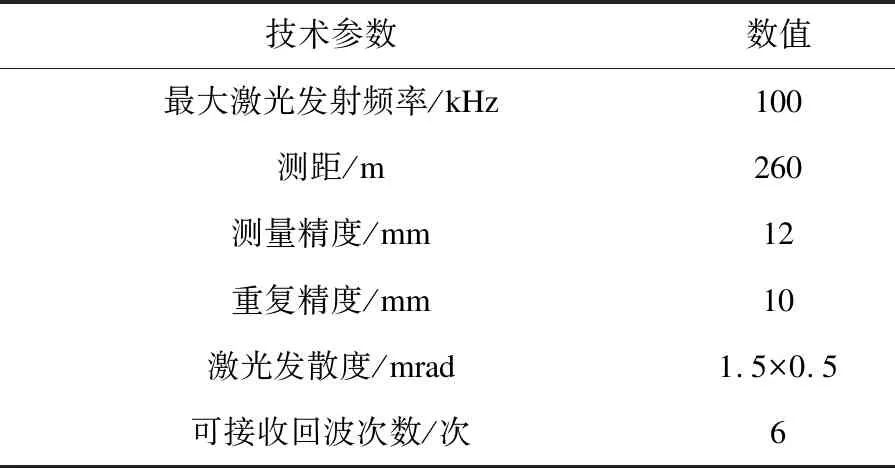
表1 RIEGL VQ-840-G型機載激光雷達主要參數
以該小區內其中一棟高層建筑物為例,利用本文算法采集該高層建筑物的三維點云數據。三維點云數據采集結果如圖1所示。
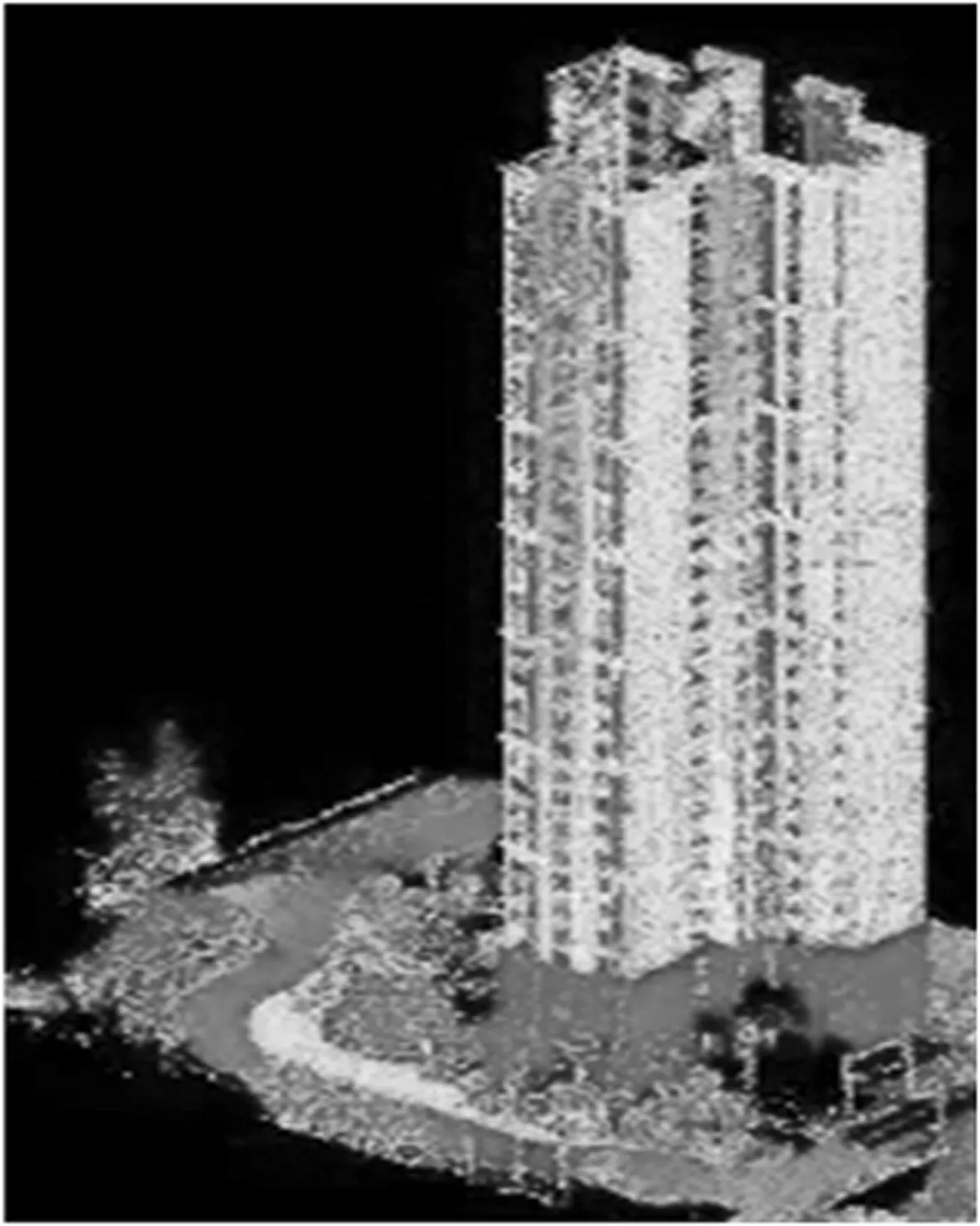
圖1 高層建筑物點云數據采集結果
根據圖1可知,本文算法可有效采集高層建筑物的三維點云數據,且采集的三維點云數據可描繪該高層建筑物的各個細節信息。
利用本文算法將采集的高層建筑物三維點云數據轉換成二維點云,并提取高層建筑物的輪廓點與關鍵輪廓點。高層建筑物輪廓點與關鍵輪廓點提取結果,如圖2所示。
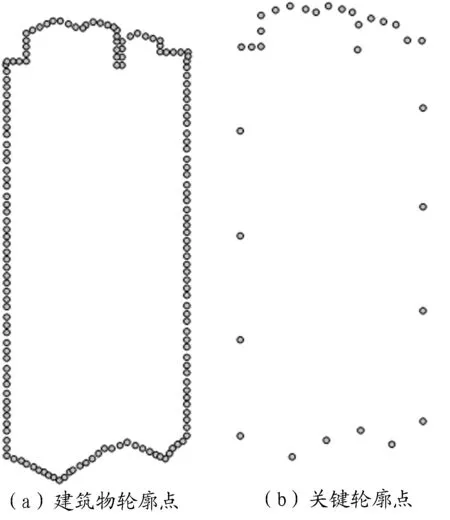
圖2 建筑物輪廓點與關鍵輪廓點提取結果
根據圖2(a)可知,本文算法可有效提取高層建筑物的整體輪廓點,提取的整體輪廓點與實際建筑物的輪廓非常接近,說明本文算法的建筑物輪廓點提取效果較優。根據圖2(b)可知,本文算法也可提取高層建筑物的關鍵輪廓點,提取的關鍵輪廓點與實際建筑物的輪廓也較為接近。實驗證明本文算法對建筑物輪廓點與關鍵輪廓點的提取是有效的。
利用本文算法簡化的高層建筑物輪廓線,并提取最終高層建筑物輪廓線,簡化高層建筑物輪廓線與最終高層建筑物輪廓線的提取結果,如圖3所示。
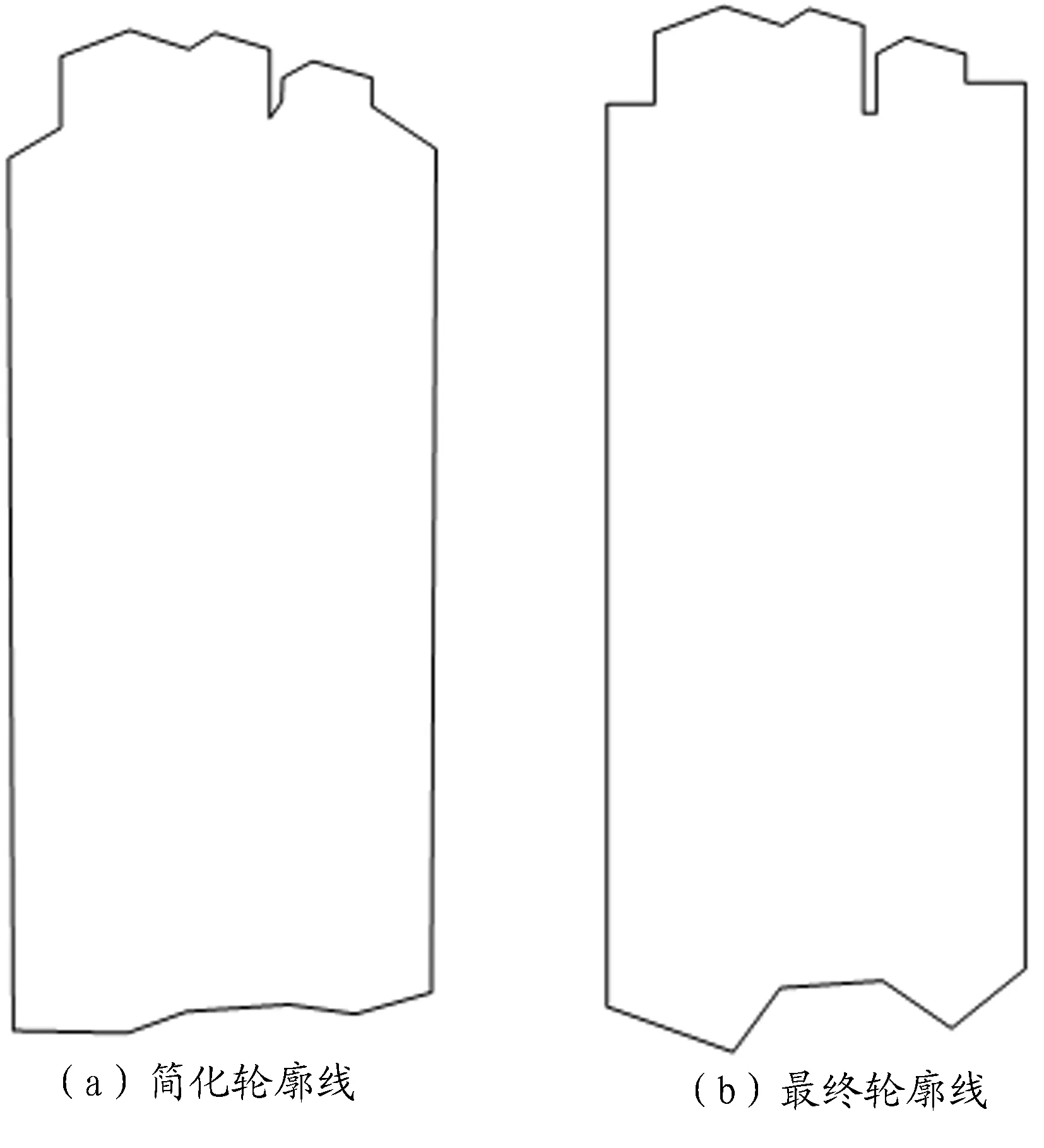
圖3 簡化輪廓線與最終輪廓線提取結果
根據圖3可知,簡化的高層建筑物輪廓線可大概描繪高層建筑物的輪廓,整體輪廓線較為平整,無鋸齒情況出現,但在90°轉角位置的處理效果較差,還需處理。經過處理后,最終提取的高層建筑物輪廓線與實際輪廓更為接近。實驗證明,本文算法可有效簡化建筑物輪廓線并提取最終的建筑物輪廓線,提取的建筑物輪廓線無鋸齒現象,整體輪廓線非常平整。
以完整率、最大偏差與點云貢獻率為評價指標,衡量本文算法的輪廓線提取效果,完整率代表輪廓線提取的完整性,其值越接近100%,輪廓線提取完整性越佳。最大偏差代表提取輪廓線位置與實際位置間的最大平面距離,其值越小,輪廓線提取精度越高,最大偏差閾值是0.2。點云貢獻率代表輪廓線提取的有效程度,其值越接近1,輪廓線提取有效程度越高。本文算法在提取不同屋頂形狀高層建筑物輪廓線時的輪廓線提取效果,結果如表2所示。
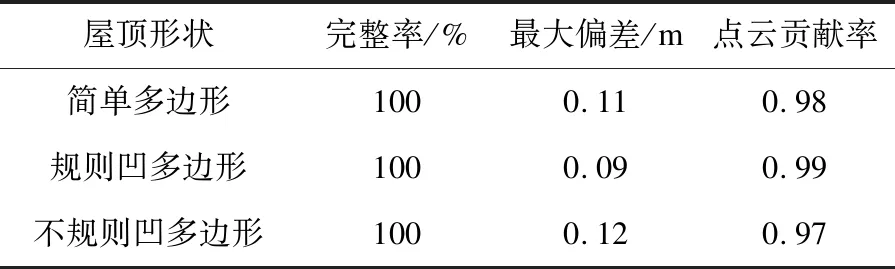
表2 高層建筑物輪廓線提取效果
根據表2可知,本文算法可提取不同屋頂形狀的高層建筑物輪廓線,且完整率均為100%,說明本文算法輪廓線提取的完整性較高;最大偏差均未超過設置的閾值,說明本文算法輪廓線提取精度較高;點云貢獻率均與1較為接近,說明本文算法輪廓線提取的有效程度較高。
3 結論
建筑物輪廓線提取在智慧城市的建設中至關重要,為此設計基于方向預測規則化的建筑物輪廓線提取算法,避免因強制調整輪廓線方向導致提取輪廓線和實際輪廓線間的偏差較大,影響提取精度,該算法可為智慧城市發展提供有利的技術支持。
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50