基于Sentinel-2超分辨率影像的干旱區水體提取方法
2023-11-23 04:38:14趙文舉李聰聰
農業機械學報 2023年10期
關鍵詞:方法
趙文舉 李聰聰 馬 宏 曾 凱
(1.蘭州理工大學能源與動力工程學院, 蘭州 730050; 2.農業農村部智慧農業節水灌溉裝備重點實驗室, 蘭州 730050)
0 引言
內陸地表水體在生態系統穩定性、經濟高質量發展中發揮著至關重要的作用[1-2],如何準確有效地識別干旱區水體,監測其時空動態,是干旱區水生態安全、水質監測、水資源高效利用等領域的關鍵[3-4]。傳統的水體數據獲取方法主要依靠流域監測站或大量的野外調查,數據獲取需耗費大量的時間及人力,數據精度高但工作效率低[5]。隨著遙感技術的發展,光學多光譜數據、高光譜數據、合成孔徑雷達數據等多元化遙感數據用于水體提取,為大范圍水體監測提供了一種新方法[6]。而高光譜數據、合成孔徑雷達數據因復雜的預處理過程、高成本等原因限制了它們在大范圍長時間序列的應用研究[7]。目前,由Sentinel衛星、中國高分衛星、Landsat衛星等獲得的光學多光譜數據仍是最常見的數據源,而Sentinel-2衛星在空間分辨率、重訪周期、信噪比方面表現優異,具有廣闊的應用前景。
超分辨率重建技術能夠以低分辨率影像為基礎提升影像分辨率,重建出高分辨率影像,以減輕采集設備和環境因素對遙感成像結果的影響[8]。當前使用超分辨率重建技術對遙感影像進行增強重建,并對重建影像進行深層次研究一直是環境生態、地學、農林等應用領域研究熱點。DU等[9]使用超分辨率重建技術處理高光譜影像數據,高分辨率重建影像在近海水產養殖地提取上取得較好成效。COURTRAI等[10]采用基于輔助生成對抗網絡的超分辨率重建技術對遙感影像小目標進行識別,證實了超分辨率方法在小型、不規則物體識別任務方面的有效性。干旱區農業與細小水體、破碎水體及復雜地物環境聯系密切,當采用多光譜影像對大范圍水體進行定量研究時,低分辨率衛星影像中圖像噪聲和模糊對細小水體及破碎水體影響較大,不利于精準掌握干旱區水體信息,通過超分辨率重建技術,有望通過技術手段突破低分辨率影像局限,增強圖像信息及細節度,提高水體提取精度。
目前多光譜影像的水體提取方法,主要有基于波段組合的水體提取方法、基于機器學習的水體提取方法和面向對象的水體提取方法[11]。楊振華等[12]針對城市化地區Landsat衛星水體指數適用性進行了研究,以深圳市為研究區,發現城市地區歸一化水體指數(Normalized difference water index,NDWI)適用性最強。LI等[11]采用閾值法、支持向量機、面向對象等方法在淮河流域等地區進行水體提取實驗,均取得較為可靠的結果。王小標等[13]以秦淮河流域為實驗區,探究復雜環境下水體指數有效性,發現多波段水體指數(Multi-band water index,MBWI)總體上較其他水體指數具有一定的優勢。水體指數法因簡單、高效、可重復、適用性廣等優點被廣泛采用,但現階段對增強光譜影像分辨率以提高水體提取精度方法及水體提取過程中使用短波紅外(Short-wave infrared,SWIR)波段與近紅外(Near-infrared,NIR)波段的提取結果差異性和干旱區適用性卻鮮有研究。
為此,本文基于超分辨率重建的Sentinel-2多光譜影像數據與同時期地面真實水體數據,將增強重建的近紅外波段與短波紅外波段作為水體提取特征波段,采用超像素分割算法確定水體像元范圍,構建基于MBWI、改進的歸一化水體指數(Modified normalized difference water index,MNDWI)、增強型水體指數(Enhanced water index,EWI)、支持向量機(Support vector machine,SVM)、神經網絡(Neural network,NN)、K-means等水體提取方法,采用總體精度(Overall accuracy,OA)、準確率(Precision)、F1值、馬修斯相關系數(Matthews correlation coefficient,MCC)等水體提取精度指標對所構建的60種水體提取方法進行綜合評價,以黑河流域甘肅段為例,確定干旱區最佳水體提取方法,以期為干旱區復雜環境下快速、準確地提取水體及在農林、生態等領域精準應用提供理論依據。
1 材料與方法
1.1 研究區概況
本文研究區位于黑河流域甘肅段(39°40′~40°18′N,97°48′~99°07′E),黑河流域屬于典型的干旱區氣候,其北部屬中溫帶干旱區,南部屬高原溫帶干旱區,上游年平均氣溫在-5~4℃之間,年均降水量由低山或丘陵地帶約250 mm增加到高山地帶約500 mm,流域從上游到下游包含眾多干旱區典型地物[14]。研究區非水體地物包含耕/林地、裸地、城市地物等,其中裸地包括荒漠、沙地、裸巖、鹽堿地等;水體地物主要包括城市含沙細小河流、城市不含沙景觀河流、小型池塘、水庫、湖泊等,以上地物基本覆蓋干旱區典型地物,能夠較為完整地展示干旱區的地物特征。本文研究區內河流與湖泊零散分布于城市、農業區及裸地,湖泊多為小型湖泊、水庫及魚塘,河流細長蜿蜒且多支流,水體邊界不易區分,水體識別困難。此外,云層、陰影等因素也會對水體的準確識別造成干擾。綜上,研究區不同區域水體差異較大,影響因素較多,水體特征模糊,進行大范圍水體提取難度大,圖1為研究區概況圖。
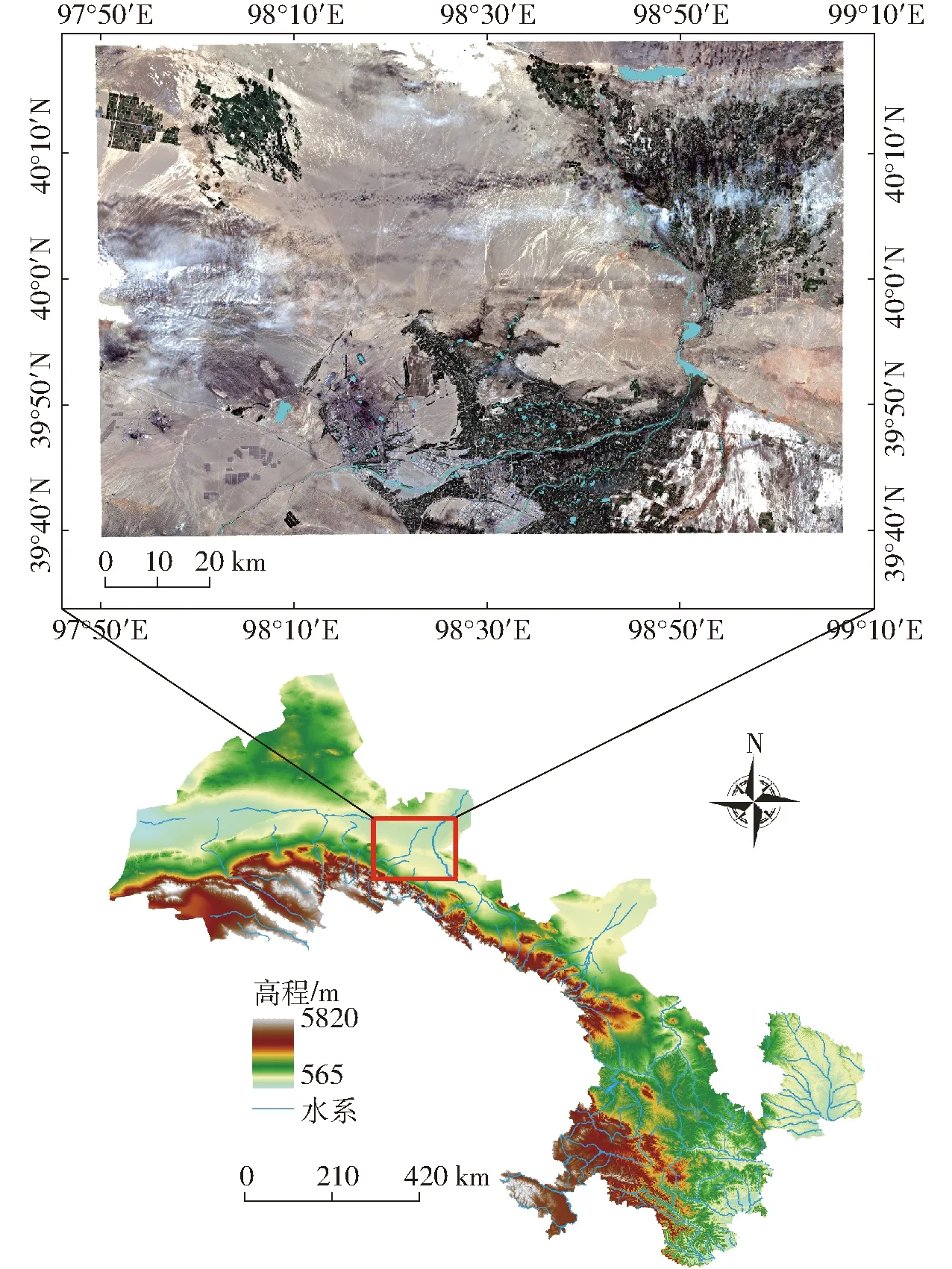
圖1 研究區概況圖Fig.1 Study area overview map
1.2 數據來源與預處理
地面數據采集工作于2022年8月開展,對研究區內典型地物(包括水體及非水體)進行標記處理,同時記錄其精確的位置坐標。實驗記錄典型水體包括湖泊、水庫、含沙河流、不含沙河流、城市景觀河流、坑塘等;記錄典型非水體包括耕/林地、城市地物、裸地等。同時,對實地數據較難獲取的區域如荒漠、山地內部、鹽堿地內部等,采用Google Earth影像數據進行人工識別,并記錄其位置信息。
本研究采用的衛星數據為公開獲取的歐空局Sentinel-2多光譜衛星影像(https:∥scihub.copernicus.eu/)。歐空局發射的Sentinel-2衛星包括A/B兩星,均搭載多光譜傳感器,提供13個波段的遙感影像(表1)。通過A、B兩星,Sentinel-2衛星可達到空間回訪周期為5 d。本研究從歐空局官方網站公開獲取2022年8月16日L1C級大氣頂層反射率影像,該影像已進行幾何精校正。本研究利用Sen2Cor插件進行大氣校正,將影像大氣頂層反射率轉換為大氣底層反射率,消除大氣和光照等因素對地物反射的影響。使用Sen2Cor插件對L1C級大氣頂層反射率影像進行輻射定標及大氣校正時,處理精度選擇10 m,處理過程中B10波段被剔除,其他波段保持不變,保留12個波段,最終生成L2A級大氣底層反射率數據,該組數據主要包括經輻射定標和大氣校正后遙感數據。
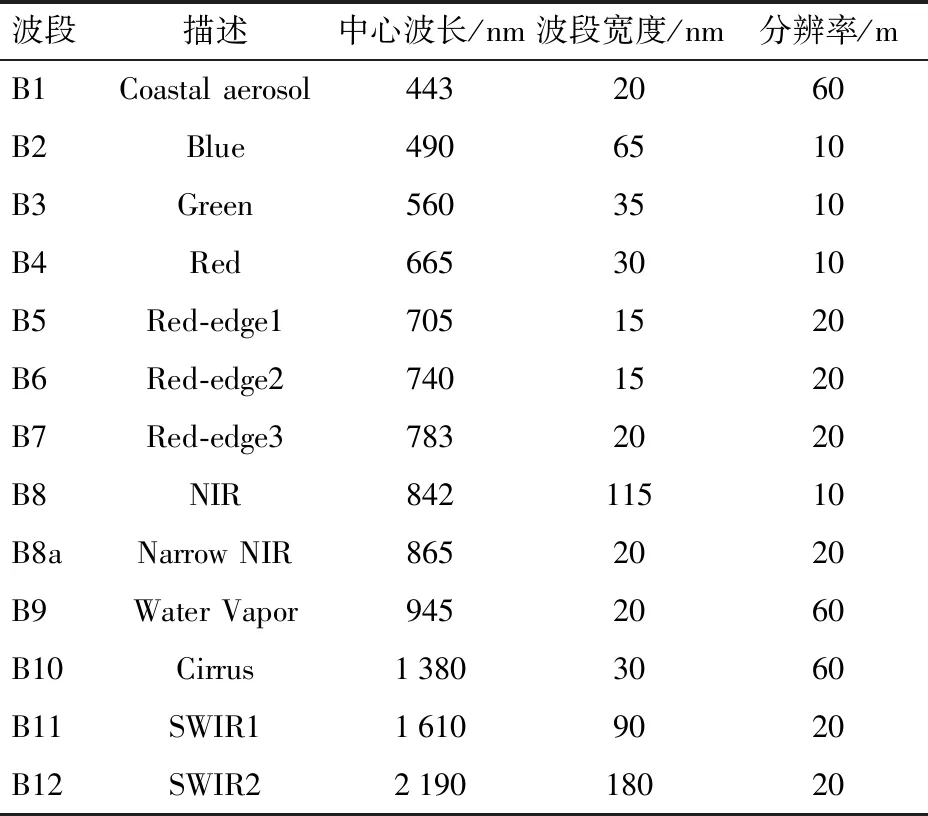
表1 Sentinel-2衛星波段信息Tab.1 Sentinel-2 satellite band information
1.3 研究方法
1.3.1超分辨率波段重建及評價
Sen2Res算法為BRODU[15]針對多光譜、多分辨率的影像提出的一種利用相鄰像元之間“共享”幾何信息的超分辨率多光譜多分辨率影像重建方法[15]。本研究在L2A級大氣底層反射率數據基礎上利用Sen2Res算法構建出超分辨率重建(Super-resolution,SR)影像,共重建出7個10 m增強波段,分別為SRB5、SRB6、SRB7、SRB8a、SRB9、SRB11、SRB12,考慮到Sentinel-2衛星波段情況,移除了沿海氣溶膠(B1)波段,并從重建質量和光譜一致性角度對超分辨率重建波段重建性能進行信度評價。為對比Sentinel-2 L2A級影像與超分辨率重建影像的重建質量及光譜相關關系,本研究對L2A級影像進行3次卷積重采樣,生成S2R(Sentinel-2 resampled)影像。
超分辨率增強波段重建性能采用信息熵(Information entropy, IE)、平均梯度(Average gradient, AG)、結構相似度(Structural similarity index measurement, SSIM)、峰值信噪比(Peak signal-to-noise ration, PSNR)進行評價。
本文計算平均梯度時采取前置處理,具體方法為:首先對原始影像像元歸一化處理,其次采取相對高斯平滑處理歸一化遙感影像,最后選取二階Laplacian算子計算平均梯度。
超分辨率影像與原始影像光譜一致性評價采用皮爾遜相關系數R、均方根誤差(RMSE)和估計精度(EA),定量分析超分辨率重建前后波段反射光譜變化情況。EA的計算公式為

(1)
1.3.2水體提取方法
本研究水體提取方法可分為兩大類,一類基于光譜指數方法,另一類基于機器學習分類算法。基于光譜指數構建的水體提取方法數據來源為L2A級大氣底層反射率產品波段(B2、B3、B4、B8)與超分辨率重建波段(B5、B6、B7、B8a、B9、B11、B12),采用目前常用的24種涉及水體的光譜指數,同時由于部分光譜指數原始研究對象為MODIS、Landsat 8、Landsat 5衛星,因此在構建Sentinel-2光譜指數時需要根據光譜范圍的重合度調整不同衛星的波段,以Sentinel-2衛星近紅外波段與短波紅外波段作為水體提取特征波段(表2),進而使用超像素分割算法識別水體像元,共構建57種基于光譜指數的水體提取方法。其中超像素分割算法是FELZENSZWALB等[16]提出的一種基于圖論的圖像分割方法,使用該算法進行水體像元識別時采用定性與定量相結合的方法來綜合確定不同光譜指數影像中水體像元的最佳提取范圍,定性方法采用人工目視判斷64位單通道光譜指數灰度影像,確定分割算法參數;進而對不同閾值范圍下水體像元進行量化,找到最佳閾值范圍。
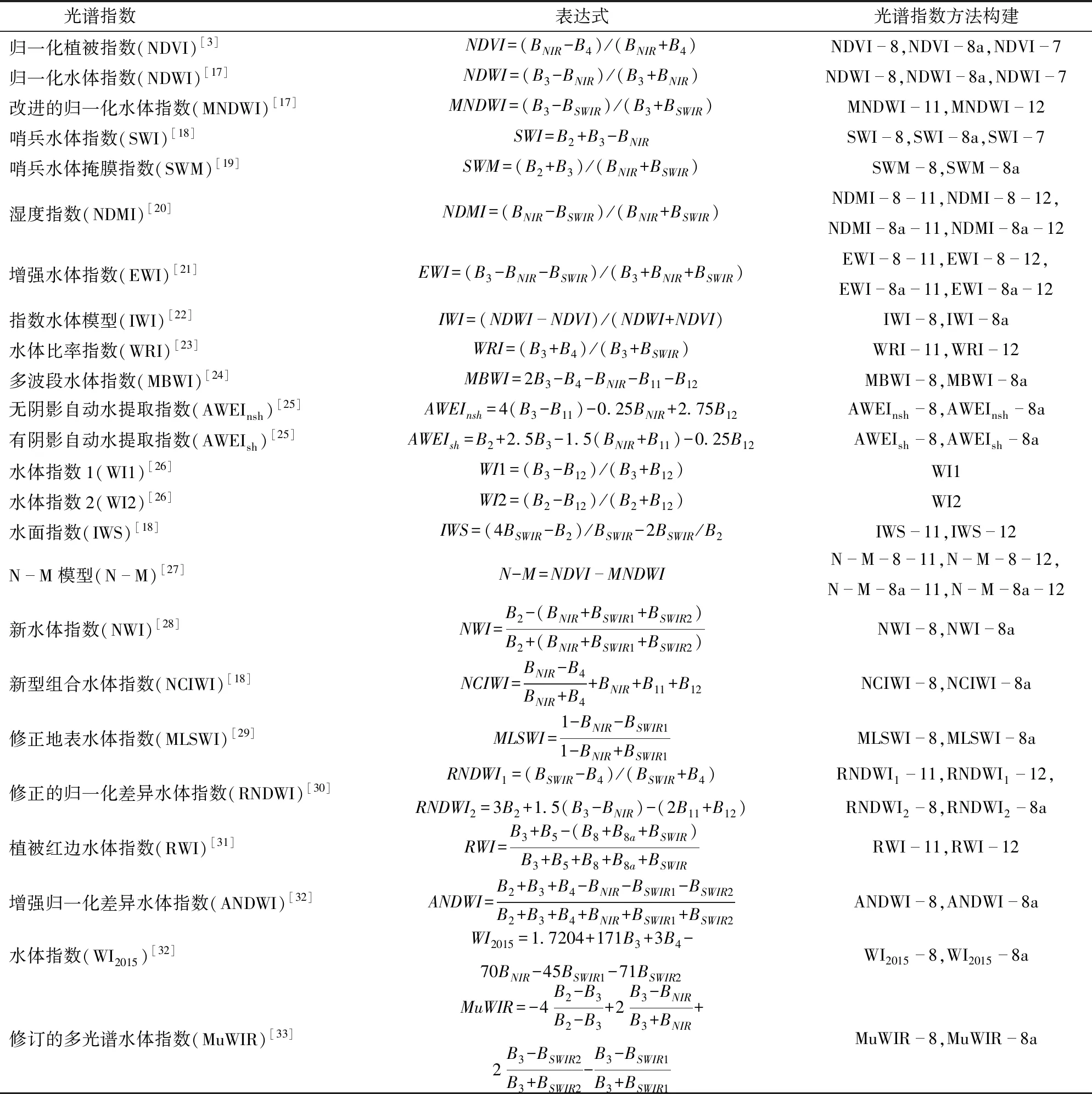
表2 光譜指數方法Tab.2 Spectral index method
機器學習方法同樣基于L2A大氣底層反射率產品波段與超分辨率重建波段,將11個波段融合形成機器學習算法輸入數據,具體算法選用監督分類中NN和SVM算法,以及無監督分類中K-means算法。其中SVM與NN樣本數據綜合2022年8月實地實驗與Google Earth數據構建,K-means方法樣本數據集為自動抽取。為平衡樣本類間分布,監督學習分類樣本選取時水體樣本包括湖泊、城市細小水體、水庫、破碎小池塘等,非水體樣本包括耕地、裸地、鹽堿地、城市地區多種地物等,最終構建的監督學習分類樣本數據集可分為兩大類,一類為水體,共6 497個像元,一類為非水體,共78 867個像元。
1.3.3水體提取方法精度評價
本研究采用總誤差(Total error)對基于原始影像波段與超分辨率重建影像波段構建的水體提取方法進行評價,主要考察水體提取過程中錯分像元與漏分像元數量,計算公式為
(2)
式中ETotal——總誤差
TP——實際地物為水體被正確分類為水體的像元數量
FP——實際地物為非水體被錯誤分類為水體的像元數量
FN——實際地物為水體被錯誤分類為非水體的像元數量
本研究對基于超分辨率重建影像構建的水體提取方法進行精度評價時采用總體精度(OA)、準確率(Precision)、召回率(Recall)以及Kappa系數(Kappa coefficient,KC)[25]。由于研究區內水體面積占總面積的0.85%,而非水體面積占比達99.15%,在分類數據量極不平衡的情況下,上述指標在表征水體提取精度時可能出現失效情況[34],故本研究引入F1值、幾何平均值(G-mean)以及馬修斯相關系數(MCC),對不均衡水體樣本提取結果進行精度評價。
由于單一指標無法衡量水體提取方法的所有優勢與劣勢,故本文采用了熵權-TOPSIS方法對60種干旱區水體提取方法的7個精度指標進行綜合分析,以確定能夠正確識別水體及非水體的干旱區水體提取方法。熵權-TOPSIS方法是使用熵權法來科學地確定7類水體提取精度指標的權重系數,進而將TOPSIS法與熵權系數綜合集成進行綜合評價[35],本文實現過程見圖2,其中確定主觀初始指標即確定正向、負向指標個數,本研究中7類精度評價指標均為正向指標。

圖2 熵權-TOPSIS排序過程流程圖Fig.2 Flowchart of entropy weight-TOPSIS sorting process
2 結果與分析
2.1 超分辨率重建評價
本節從定性與定量兩方面分別對三次卷積重采樣、超分辨率重建影像進行評估。定性地對2022年8月60 m分辨率單波段(以B9為例)和20 m分辨率波段組合(R∶B12,G∶B7,B∶B5)Sentinel-2衛星原圖像、三次卷積重采樣圖像、超分辨率重建圖像進行對比。對于單波段影像(圖3a~3c),使用超分辨率算法從原始60 m分辨率增強重建為10 m分辨率,已基本消除原始圖像中像元的顆粒感,并通過獲取臨近波段地物幾何信息,基本完成還原地物真實細節,三次卷積重采樣影像極大地消除了像元顆粒感,影像整體較為平滑,但依然不能準確區分地物特征,超分辨率增強重建效果明顯優于三次卷積重采樣影像。相較原始60 m分辨率B9影像與三次卷積重采樣10 m分辨率B9影像,超分辨率重建后影像清晰程度大幅提升,原因為超分辨率重建過程中,低分辨率波段通過鄰近高分辨率波段補充了大量的地物固有物理信息。對于波段組合影像(圖3d~3f),使用超分辨率算法從20 m分辨率增強重建為10 m分辨率,影像地物輪廓與紋理細節進一步增強,細小水體邊緣更加清晰,水體范圍更加凸出,三次卷積重采樣影像較好地實現了平滑效果,但影像整體對比度較差,較難區分水體邊界,超分辨率增強重建效果優于三次卷積重采樣影像。通過對比單波段影像與波段組合影像,可得超分辨率增強重建后,影像清晰度進一步增加,地物邊緣更易區分,有利于水體像元的識別。
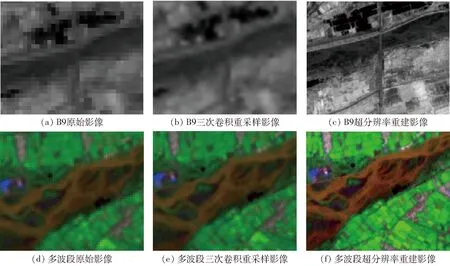
圖3 重建對比圖Fig.3 Reconstruction comparison charts
定量評估超分辨率重建影像質量具體指標見表3,經超分辨率重建后,B9波段信息熵提升0.06,其余波段信息熵略有下降。對比超分辨率重建與原始影像信息,超分辨率重建影像各波段平均梯度提升較大,平均提升66.3,原始低分辨率影像經超分辨率重建,補充了缺失的細節信息,使圖像更加清晰、更具可識別性。對比超分辨率重建波段與原始影像波段,超分辨率重建波段整體結構與原始影像波段高度相似,B9波段的結構相似度為0.828 7,B5、B6、B7波段結構相似度均達到0.85以上,B8a、B11、B12波段結構相似度為0.90以上。對比超分辨率重建與原始影像,B5、B6、B7、B8a、B11、B12波段峰值信噪比均達到38 dB以上。經過超分辨率算法重建后,重建波段噪聲少,重建梯度細節豐富,包含更為豐富的信息量,有利于水體提取。
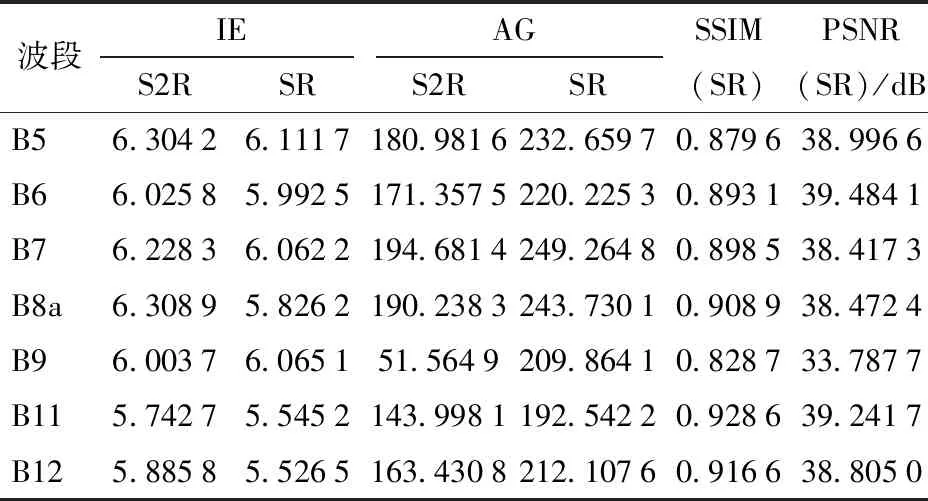
表3 超分辨率重建質量評價Tab.3 Super-resolution reconstruction quality evaluation
對超分辨率重建影像波段與原始影像波段光譜一致性分析時,將研究區域均勻劃分為500×500區塊,提取區域中心點像元值,即均勻選取250 000個樣本進行光譜一致性分析。超分辨率重建后,重建影像各波段光譜反射率與原始影像對應波段光譜反射率R均在0.96以上,RMSE小于0.020 5,估計精度均在94%以上,具體結果見表4。由重建波段與原始影像波段散點圖(圖4)可得,B5、B6波段光譜反射率分布于0~0.7,SRB5、SRB6波段光譜反射率分布于0~0.6,呈正線性相關,B7、B8a、B11、B12波段光譜反射率分布于0~0.8,分別與SRB7、SRB8a、SRB11、SRB12呈正線性相關,B9波段光譜反射率分布于0~1,與SRB9呈正線性相關。

表4 超分辨率重建光譜一致性分析Tab.4 Super-resolution reconstructed spectral coherence analysis
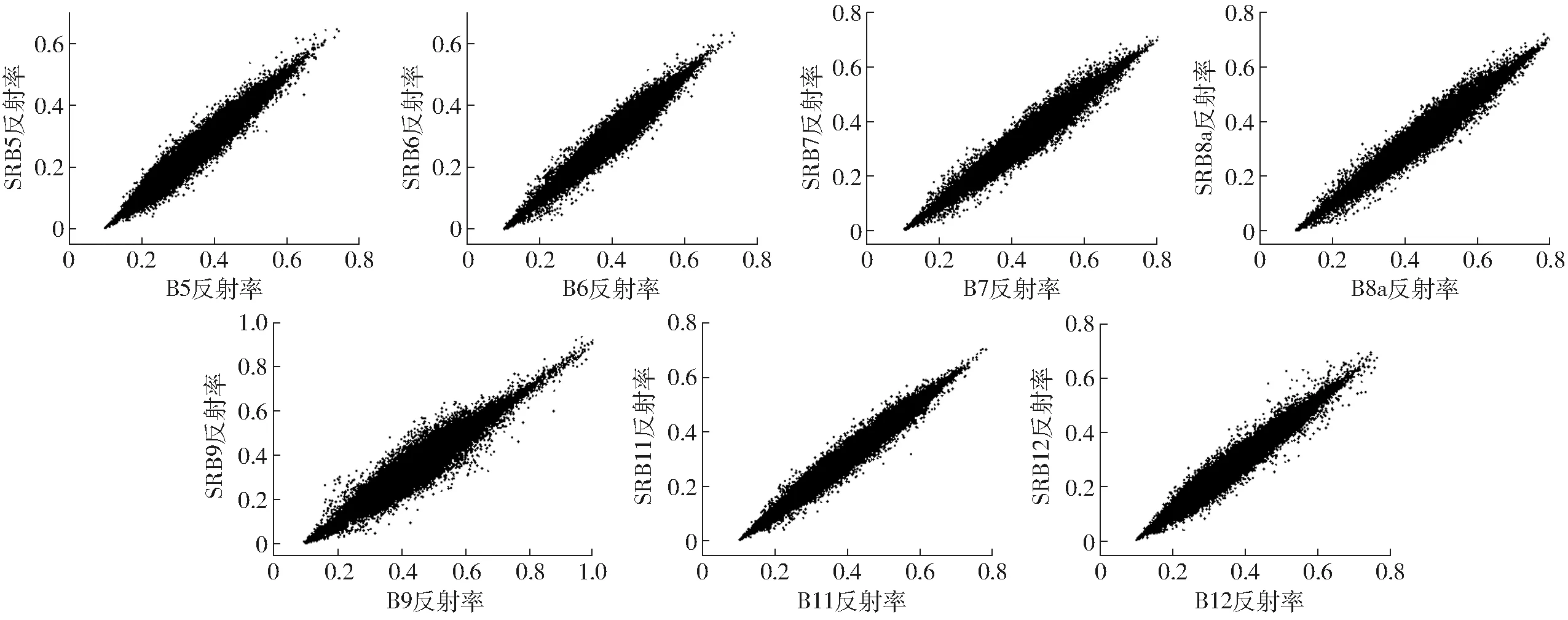
圖4 光譜反射率散點圖Fig.4 Scatter plots of spectral reflectance
為研究原始圖像與超分辨率重建影像實際應用的精度差異,本節通過對比二者采用同一光譜指數方法進行水體提取任務時錯分像元與漏分像元的數量,并通過水體提取總誤差進行定量考察。因構建水體指數影像時,光譜波段空間分辨率需統一,故將原始影像B7、B8a、B11、B12波段使用三次卷積方法重采樣為10 m,再進行水體提取。通過分析重采樣影像相較超分辨率增強影像水體提取總誤差減少量,得到使用超分辨率增強影像提取水體時,典型光譜指數如MNDWI、EWI、MBWI、N-M、WI1、RNDWI、AWEIsh、NDVI、WRI總誤差分別減少17.693 2%、18.233 5%、5.540 0%、14.899 3%、25.865 7%、37.244 2%、7.674 1%、16.717 5%、29.885 7%,平均總誤差減少19%(圖5)。超分辨率重建影像相較原始影像在進行水體提取任務時具有明顯優勢。
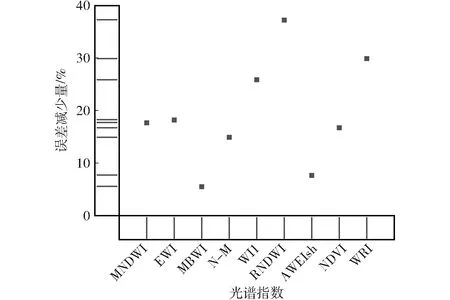
圖5 誤差分析Fig.5 Error analysis graph
綜上,超分辨率重建后各波段重建質量較好,在保留原始影像固有信息的基礎上,增強了原始影像中低分辨率(20、60 m)原始影像地物之間的細節,提高了影像清晰度,減少了影像噪聲,并且經超分辨率重建后,重建影像各波段光譜反射率與原始影像光譜反射率之間存在極高的一致性,且誤差較小,可在保證影像可靠性的前提下將超分辨率影像代替原始低分辨率影像應用于科學探究與工程實踐,提高研究精度。
2.2 水體提取方法構建
基于超分辨率重建波段的水體提取方法構建流程見圖6。基于光譜學指數構建水體提取方法時使用超像素分割算法處理表2中57種特征光譜指數,并基于超分辨率重建波段,構建出64位單波段水體識別輸入波段,通過調整分割尺度、高斯核、分割區域最小尺度3個參數,實現地物精細化分離,并識別水體范圍,不同特征光譜指數水體識別閾值范圍計算結果見表5,共構建57種基于光譜指數的水體提取方法。基于機器學習方法進行水體提取任務時,共構建3種機器學習方法,樣本數據集來源及構建方法見1.3.2節。SVM與NN采用分層抽樣的方法,從監督學習樣本數據集中將水體及非水體樣本隨機抽取,按8∶1∶1組成訓練集、測試集、驗證集[36]。K-means方法進行聚類時,聚類數目劃分主要參考研究區水體及非水體特征,經多次試驗后聚類數目選擇4,訓練集、測試集、驗證集的樣本數據選取無需人工操作,由隨機方法抽取組成,隨機抽取比例為8∶1∶1。

表5 不同光譜指數方法的水體閾值范圍Tab.5 Water body threshold range of different spectral index methods
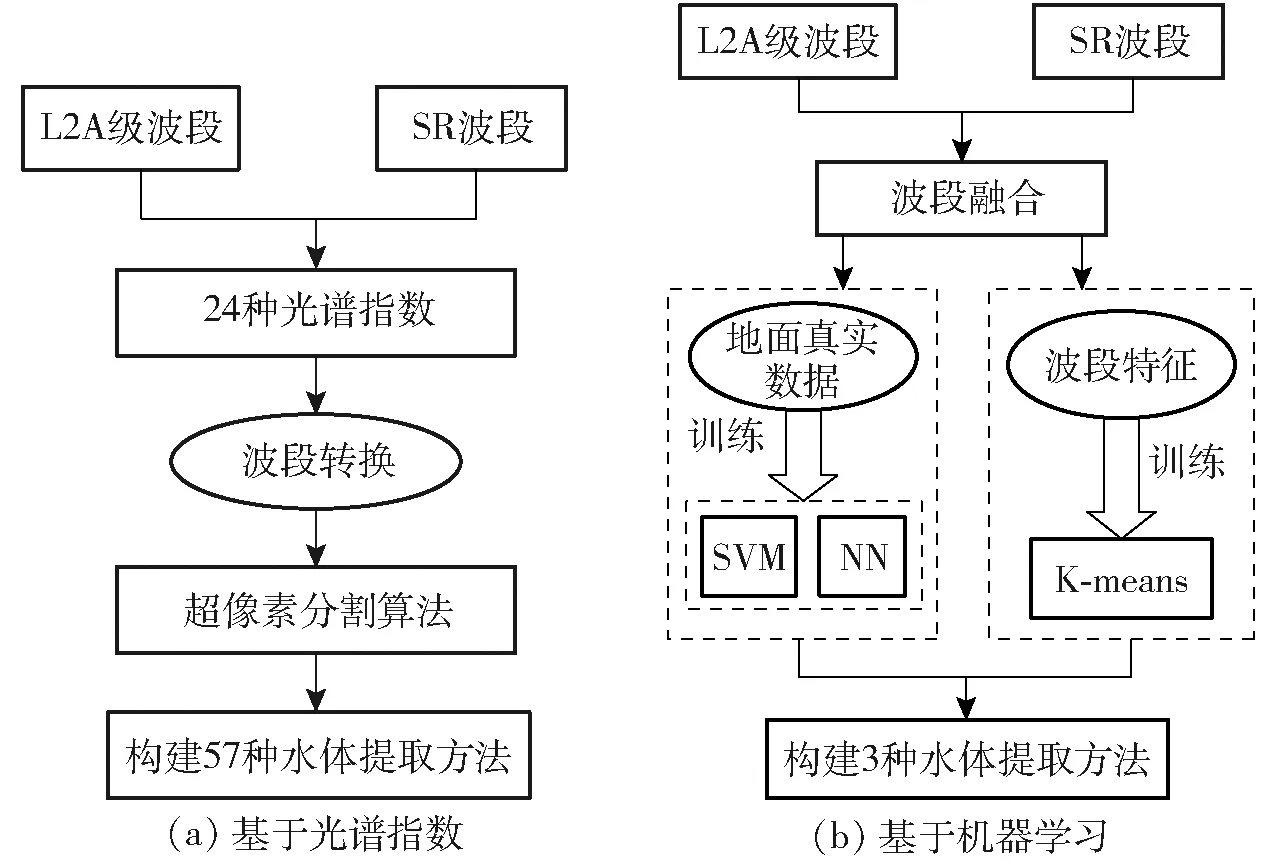
圖6 水體提取方法構建流程圖Fig.6 Flowchart for construction of water body extraction method
2.3 水體提取方法適用性分析
本節中利用所構建的60種干旱區水體提取方法計算水體提取精度指標并進行區域適用性分析。水體提取過程關鍵識別區塊包括湖泊、水庫、陰影、云層、復雜環境細小水體、鹽堿地等(圖7),精度評價所需真實地物關鍵識別區塊樣本數據根據2022年8月實地考察、研究區流域資料、Google Earth影像數據綜合確定,并采用熵權-TOPSIS方法對7種水體提取精度指標進行綜合評價,得到干旱區水體提取方法適用性結果,具體精度指標結果及熵權-TOPSIS方法綜合排序見表6。

表6 水體提取精度評價結果Tab.6 Evaluation results of water body extraction accuracy
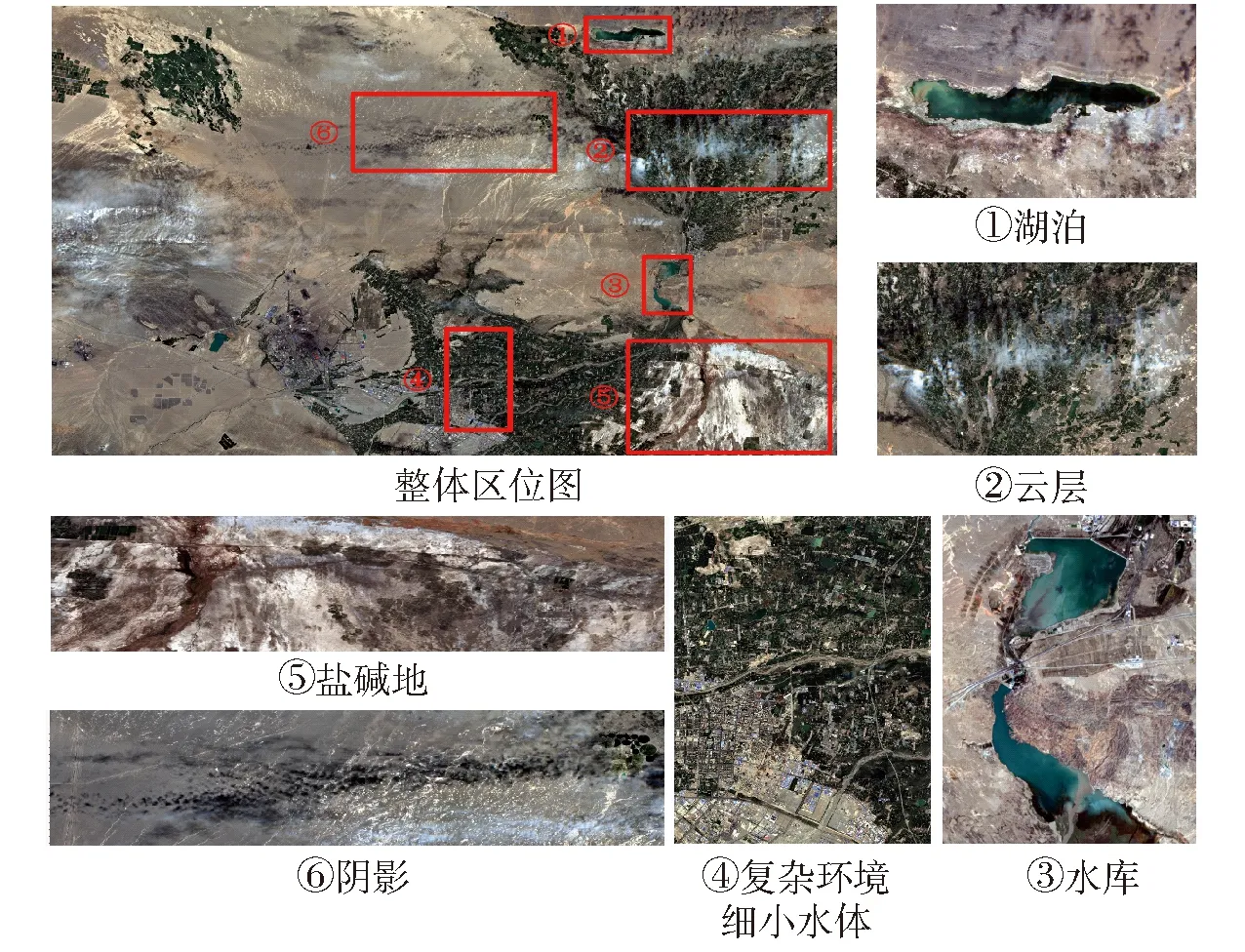
圖7 水體提取關鍵區位圖Fig.7 Key zone maps for water body extraction
為便于對比水體提取結果,本節對水體提取影像進行二值化處理,將水體像元賦值1,非水體像元賦值0,同時僅挑選對比度較高影像進行可視化處理,放大展示不同水體提取方法提取結果(圖8)。機器學習方法提取水體時,監督分類中SVM算法水體識別效果最優,總體精度為99.75%,召回率達98.51%,Kappa系數、F1值、G-mean、MCC均超過0.85;NN算法識別水體時,對城市上空云層識別較差,總體精度為99.57%,G-mean與MCC超過0.80,以上兩種方法在去除干擾的情況下,漏分較少,存在少量錯分。無監督分類中K-means算法總體精度為96.87%,F1值為31.81%,G-mean、MCC為0.409 7、0.401 1,對陰影和裸地識別較差,對大型水體如湖泊和水庫能夠正確分類,但細小水體存在較多漏分。

圖8 水體提取對比Fig.8 Comparisons of water body extraction
光譜指數方法中MNDWI、RWI、RNDWI1、WRI對SWIR波段敏感性較強,特征波段取Band11進行水體提取時水體識別精度相較Band12提升較大。MNDWI-11相較MNDWI-12召回率提升10個百分點,水體漏分較少;相較RWI-11,RWI-12水體提取對鹽堿地處理錯分較多,準確率下降7.49個百分點;相較RNDWI1-12,RNDWI1-11在準確率、召回率、MCC等方面表現優秀,水體識別較好;相較WRI-12,WRI-11能明顯去除鹽堿地對水體提取的影響,水體識別準確率提升超過37個百分點。
光譜指數方法中EWI、N-M進行水體提取時,對NIR波段敏感性較弱,對SWIR波段敏感性較強,相較使用Band11,EWI與使用Band12進行水體提取時,召回率提升超2.65個百分點,在云層干擾下,水體漏分較少,N-M進行水體提取時,波段差異較大,N-M-8-12水體識別效果最好,準確率達97.22%,存在少量漏分,召回率為75.57%。光譜指數方法中,SWM、NDWI對NIR波段較為敏感,相較于SWM-8a,SWM-8能夠較好地處理破碎湖泊及池塘,召回率、F1值、G-mean、MCC提升超2.5個百分點,NDWI-8較好地去除了陰影干擾,但 NDWI-8對細小河流識別較差,召回率為73.89%。光譜指數方法中MBWI、ANDWI、WI2015、MuWIR、NWI、MLSWI、NCIWI、AWEIsh、NDVI提取水體時,對NIR波段與SWIR波段無明顯敏感性,其中MBWI對云層干擾識別較差,ANDWI、AWEIsh、WI2015對破碎水體識別較差,MuWIR云層錯分噪點較多,NWI基本無錯分,存在少量漏分水體,MLSWI對云層識別較差,NDVI對細小河流及破碎水體識別較差。
光譜指數方法中,MNDWI-11、RWI-11、EWI-8-12、EWI-8a-12、MBWI-8a、MBWI-8、EWI-8-11、EWI-8a-11、SWM-8對研究區進行水體提取時,水體提取總體精度大于99.75%,F1值大于85.27%,Kappa系數、G-mean、MCC均高于0.85,在復雜地物的情況下,能夠忽略干擾,完整提取水體且基本無錯分漏分,水體提取效果較好。光譜指數方法中,N-M-8-12、RWI-12、N-M-8a-12、MNDWI-12、WI1、MuWIR-8、ANDWI-8、ANDWI-8a、SWM-8a、MuWIR-8a、N-M-8-11、N-M-8a-11、NWI-8、WI2015-8、NWI-8a、WI2015-8a在較完整地提取水體的同時,有較少的錯分及漏分現象,水體提取總體精度大于99.68%,F1值大于78.36%,Kappa系數、G-mean、MCC高于0.78,能夠達成識別、提取水體的任務。采用AWEInsh-8、AWEInsh-8a進行水體提取時,對云層、鹽堿地識別較差,水體提取F1值低于9.87%;基于SWI指數構建的光譜指數方法提取水體時,對鹽堿地、云層及陰影識別較差,F1值低于11.15%;基于NDMI指數構建的光譜指數方法提取水體時,對耕地影響較大,水體提取F1值低于8.83%;采用IWI-8a、IWI-8提取水體時,受裸地影響較大,水體提取F1值低于5.31%。
綜上,基于Sentinel-2綠色波段(中心波長為560 nm)與超分辨率增強重建短波紅外波段(中心波長為1 610 nm)構建的改進的歸一化水體指數方法(MNDWI-11)對水體提取的總精度為99.81%,準確率為92.04%,F1值為88.02%、G-mean、馬修斯相關系數均大于0.88,在不均衡地物環境下,能夠準確識別陰影及云層,是干旱區最佳的水體提取方法(圖8b)。水體指數方法中RWI-11、EWI-8-12、EWI-8a-12、MBWI-8a、MBWI-8、EWI-8-11、EWI-8a-11、SWM-8,機器學習方法中SVM,總體精度超過99.75%,F1值大于85.27%,G-mean、MCC指標超過0.85,可在復雜地物的情況下,較為有效地排除陰影、云層等干擾,水體提取適用性較好,也可用于干旱區水體提取。
3 討論
本研究利用超分辨率算法將Sentinel-2衛星影像的分辨率提升至10 m,增強了Sentinel-2衛星中低分辨率波段,整體提高多光譜數據質量,超分辨率重建過程中,從最高分辨率的波段開始,將反射率信息與場景元素的幾何體信息分開,在保持高分辨率圖像細節的同時,能有效地降低噪聲和偽像的影響,不改變某一像元區域內相同地物的固有物理特性,為未來水體相關研究提供了更豐富的數據支持,特別對水體提取有較大提升。本文建立了評估多光譜影像超分辨率重建性能的系統框架,為今后進一步優化衛星影像超分辨率重建提供相關依據。
同時,經超分辨率重建的分辨率10 m紅邊波段(Band5、Band6、Band7)、近紅外波段(Band8a)、短波紅外波段(Band11、Band12)數據源對其他領域的研究也具有一定促進作用。任建強等[37]基于Sentinel-2A數據估算冬小麥收獲指數時發現紅邊波段在大范圍作物動態收獲指數空間信息獲取上具有較大的潛力,許章華等[38]發現Sentinel-2A多光譜衛星Band6、Band7、Band8、Band8a對剛竹毒蛾危害具有較強的響應能力,紅邊與近紅外波段參與構建的指數可有效反映竹林的受害情況,以上學者充分利用了Sentinel-2紅邊波段、近紅外波段進行相關研究,并取得了較為優秀的成果。根據本研究,超分辨率重建后,相關波段重建質量較高且重建波段與原始波段光譜一致性較好,未來使用Sentinel-2多光譜影像研究時,若使用超分辨率重建影像,可發掘更多信息。
光譜指數方法提取水體時,在復雜地物情況下,水體識別與分割較為困難。超像素分割算法較好地利用圖像中像元之間的全局關系,處理本研究中不均衡樣本水體分割任務表現較好。此外,水體識別過程中,不同光譜指數中心波長范圍差異較大,使用光譜指數方法進行干旱區水體提取時,由于近紅外波段與短波紅外波段不同導致水體提取結果存在較大差異,故應用光譜指數方法提取水體時,需考慮傳感器中心波段差異造成的影響。
機器學習方法中監督分類算法SVM與NN因大量的人工數據參與,精度表現較好,但無監督分類算法(K-means)則表現較差。并且MNDWI-11、RWI-11等進行干旱區水體提取時,精度可超過機器學習算法中SVM、NN與K-means,這對目前進行水體提取時是否應更傾向于人工數據參與及是否應該選擇使用復雜模型有一定參考意義。
評估光譜指數方法和機器學習方法水體提取性能時,需考慮樣本不均衡產生的影響。本研究中若僅以總體精度作為評價指標,將會對水體提取方法適用性產生錯誤的判斷,當大量水體被錯誤的識別為非水體時,總體精度仍可達到90%以上,這與實際情況相悖。若單獨以準確率作為評價標準,此時又會發生較為嚴重的漏分情況,難以滿足水體提取時的尺度需求,需要根據實際需求,選取適當的評價指標,進行綜合考量后判斷最佳的方法。本研究中引入F1值、G-mean、MCC補充評估不均衡水體提取精度,綜合分析OA、準確率、召回率、KC、F1值、G-mean、MCC對最終結果的影響程度,進而評估干旱區水體提取方法適用性。
本文基于Sentinel-2衛星增強影像研究了干旱區最優水體提取方法,并對影像超分辨率重建、超像素分割、光譜指數波段差異性進行了初步探索。在超分辨率重建過程中,信息量的變化對未來水體提取及Sentinel-2衛星紅邊波段、近紅外波段、短波紅外波段擴展應用的影響有待進一步研究。并且根據本研究,部分光譜指數方法對波段、地物的敏感性較大,研究區域不同時如何快速尋找適合的光譜指數仍需進一步分析。在未來的研究中,可嘗試根據波段對不同地物的響應機理來優化超分辨率算法及水體提取方法,以期發現精度更高、適用性更強的水體提取方案。總體而言,本研究對多光譜數據分辨率提升及干旱區復雜環境下水體提取方法的適用性研究具有一定參考意義。
4 結論
(1)通過利用超分辨率算法將Sentinel-2衛星影像分辨率提升至10 m,對比原始分辨率與三次卷積重采樣影像,重建影像平均梯度平均提升66.3、結構相似度大于0.828 7、峰值信噪比均大于38 dB,重建質量較好;通過250 000點光譜反射率一致性校驗,重建影像與原始影像反射率具有高度相關性,所有波段相關系數均大于0.96,估計精度大于94%;使用超分辨率重建影像進行水體提取時,相較原始影像,平均總誤差減少19%。通過超分辨率重建,增強原始影像地物輪廓、紋理信息等空間細節,提高影像清晰度,對水體提取提升較大,為更進一步研究大尺度水體信息提供方法支撐。
(2)通過研究Sentinel-2增強影像光譜指數提取方法中不同光譜指數近紅外波段及短波紅外波段水體識別性能差異,得到光譜指數中MNDWI、RWI、RNDWI1、WRI對SWIR波段較為敏感;EWI、N-M對NIR波段較不敏感但對SWIR波段較為敏感;SWM、NDWI對NIR波段較為敏感;而MBWI、ANDWI、WI2015、MuWIR、NWI、MLSWI、NCIWI、AWEIsh和NDVI對NIR波段沒有明顯的敏感性。
(3)通過對干旱區水體提取方法進行了探索,得到基于超分辨率重建影像構建的MNDWI-11,能夠精準識別水體及非水體,有效地降低錯分與漏分像元數量,水體提取總精度達99.81%,準確率為92.04%,F1值為88.02%,G-mean、馬修斯相關系數大于0.88,是干旱區最佳水體提取方法。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56