一種基于十射線模型的室內(nèi)射線跟蹤改進(jìn)模型算法
2023-11-21 05:34:26張紫越嚴(yán)天峰高銳肖臨虎牛瑞婷
宇航計(jì)測技術(shù) 2023年5期
關(guān)鍵詞:模型
張紫越嚴(yán)天峰高 銳肖臨虎牛瑞婷
(蘭州交通大學(xué) 電子與信息工程學(xué)院,甘肅省高精度北斗定位技術(shù)工程實(shí)驗(yàn)室,蘭州 730070)
1 引言
隨著無線通信網(wǎng)絡(luò)的發(fā)展,物聯(lián)網(wǎng)技術(shù)的進(jìn)步使人們對于在室內(nèi)場景下進(jìn)行無線通信的需求不斷增加。為了滿足這些需求,無線通信網(wǎng)絡(luò)需要不斷升級和改進(jìn)以提供更可靠、穩(wěn)定的通信服務(wù)。室內(nèi)和室外無線信道的環(huán)境特點(diǎn)有所不同,室內(nèi)電波傳播的復(fù)雜性受到建筑物布局、材料和大型家具等因素的影響[1]。因此,對于室內(nèi)無線信號的預(yù)測和傳輸損耗的分析,并提高室內(nèi)短距離通信系統(tǒng)的可靠性和安全性是非常重要的[2]。通過研究室內(nèi)場強(qiáng)覆蓋情況,可以提高短距離無線通信的穩(wěn)定性和可靠性,同時(shí)也可以促進(jìn)分米波技術(shù)和5G 室內(nèi)微波技術(shù)的應(yīng)用和發(fā)展,為場景的設(shè)計(jì)和應(yīng)用提供重要的理論基礎(chǔ)和技術(shù)支持。
在分析室內(nèi)環(huán)境傳播特性時(shí),射線跟蹤算法是一種有效工具。F.Alwafie 在不同頻率下使用射線跟蹤算法研究了室內(nèi)無線信道的傳播特性[3]。Lim等人在排水溝環(huán)境中,證明了射線跟蹤算法對此類環(huán)境分析是有效的[4]。Pereira 等人通過射線跟蹤算法分析了MIMO 信道特性受到環(huán)境描述準(zhǔn)確度的影響,并且構(gòu)建室內(nèi)環(huán)境信道模型,計(jì)算了不同場景中的信道參數(shù)[5]。張雙勤在對隧道場景進(jìn)行分析時(shí),使用灰狼優(yōu)化算法對射線跟蹤算法模型參數(shù)進(jìn)行校準(zhǔn)優(yōu)化[6]。Zhang N.等人使用射線跟蹤軟件,對室內(nèi)23.5 GHz 信道的實(shí)測數(shù)據(jù)和信道建模進(jìn)行校準(zhǔn)[7]。陶昕在分析某大樓內(nèi)的覆蓋性能指標(biāo)時(shí),采用射線跟蹤算法證明預(yù)測結(jié)果與實(shí)測結(jié)果相一致[8]。在以往的研究中,都是使用通用射線跟蹤模型,僅僅限定了射線在環(huán)境中的反射次數(shù)小于10 次[6],但當(dāng)在實(shí)際傳播中經(jīng)歷十次反射會造成該條射線上所帶信息的損失,導(dǎo)致結(jié)果出現(xiàn)誤差,使得準(zhǔn)確度降低。
為了解決以上問題,提出一種改進(jìn)的射線跟蹤算法,通過基于十射線模型[9,10]進(jìn)行校準(zhǔn),限定反射次數(shù)與穿過墻面的數(shù)量,在視距(Line of Sight,LOS)和非視距(Non-Line of Sight,NLOS)兩種環(huán)境下,對于通用模型和十射線模型的接收功率值與實(shí)測值進(jìn)行比較。實(shí)驗(yàn)結(jié)果表明,經(jīng)過校準(zhǔn)的模型與實(shí)測數(shù)據(jù)的吻合度較高,具有較優(yōu)的性能。此外,還將該算法與常用的室內(nèi)電波傳輸模型進(jìn)行對比,如Keenan-Motley 模型、ITU-R P.1238 模型和Lee 模型,結(jié)果表明該算法具有更高的準(zhǔn)確度。
2 常用室內(nèi)無線傳播模型理論
2.1 Keenan-Motley 模型
Keenan-Motley 模型用于描述室內(nèi)電波在傳播中的信號衰減。它基于自由空間傳播路徑損耗模型,通過實(shí)測數(shù)據(jù)考慮到穿透室內(nèi)墻壁和地板的附加損耗進(jìn)行修正。該模型適用于高頻波段,如2.4 GHz 或5 GHz。由于是經(jīng)驗(yàn)?zāi)P停虼嗽趹?yīng)用中需要結(jié)合實(shí)際情況進(jìn)行調(diào)整[11]。根據(jù)Keenan-Motley 模型,基本傳輸損耗Lb(dB)如式(1)所示:
式中:LF——自由空間的基本傳輸損耗(dB);m——收發(fā)端直線距離穿透的樓層數(shù);F——樓層衰減因子;n——收發(fā)端直線距離穿透的墻壁數(shù);W——墻壁衰減因子。
在實(shí)驗(yàn)室環(huán)境中,F(xiàn)=19,W=10。
2.2 ITU-R P.1238 位置通用模型
ITU-R P.1238 位置通用模型是一種傳播數(shù)據(jù)的預(yù)測方法,可以用于預(yù)測室內(nèi)無線電信號的傳播損耗和信噪比等參數(shù),以幫助無線通信系統(tǒng)的設(shè)計(jì)和規(guī)劃。該模型適用于發(fā)射端和接收端都位于同一樓層的情況[12]。基本傳輸損耗Lb(d,f)(dB)如式(2)所示:
式中:d——發(fā)射臺站和接收臺站之間的三維直線距離(m);f——工作頻率,GHz;α——基本傳輸損耗的增加與距離的相關(guān)系數(shù);β——基本傳輸損耗補(bǔ)償值;γ——基本傳輸損耗的增加與頻率的相關(guān)系數(shù)。
在LOS 環(huán)境下,α=1.46,β=34.62,γ=2.03;在NLOS 環(huán)境下,α=2.46,β=29.53,γ=2.38。
2.3 Lee 模型
Lee 模型是由William C.Y.Lee 和David J.Y.Lee 提出的模型,用于計(jì)算不同環(huán)境中的路徑損耗。Lee 室內(nèi)模型是Lee 模型的室內(nèi)環(huán)境部分,需要詳細(xì)的傳播路徑信息,并將傳播路徑劃分為LOS 傳播和NLOS 傳播等情況[13]。該模型采用分段計(jì)算的方法,提高了準(zhǔn)確性。Lee 模型在無線通信系統(tǒng)設(shè)計(jì)和規(guī)劃中應(yīng)用廣泛,特別是在室內(nèi)環(huán)境中的應(yīng)用。
在LOS 場景,其路徑損耗計(jì)算方法為:
式中:LLOS——視距傳輸損耗,dB;d——視距傳輸距離,m;λ——信號波長;D——近中心距離,m;hT——發(fā)射天線高度;hR——接收天線高度;ε——地板的介電常數(shù)。
在NLOS 場景,其路徑損耗計(jì)算方法為:
式中:LNLOS——非視距傳輸損耗(dB);FLOS——接收天線與D之間缺少近中心空隙造成的損耗;B——室內(nèi)墻體的厚度。
2.4 射線跟蹤模型
射線跟蹤模型是在麥克斯韋方程組的高頻射線光學(xué)理論基礎(chǔ)上,充分考慮到環(huán)境對電磁波的影響,計(jì)算出相應(yīng)信道參數(shù)[14]。該方法是從發(fā)射端發(fā)出射線,在傳播路徑中會發(fā)生衍射、反射、直射和繞射等效應(yīng),這是由于傳播環(huán)境復(fù)雜,使得射線在傳播途中遇到障礙物。最終射線到達(dá)接收端,將這些信號進(jìn)行矢量疊加,獲得路徑數(shù)據(jù)、場強(qiáng)覆蓋及路徑損耗矩陣。
因?yàn)樵趯?shí)際的室內(nèi)環(huán)境中家具、裝飾的影響,情況較為復(fù)雜,為了簡化分析過程,僅考慮了射線與在墻壁的影響下發(fā)生直射和反射的場景,收端的接收信號功率為:
式中:PT——發(fā)射功率;GR——接收端天線增益;GT——發(fā)射端天線增益;d——直射路線的路徑長度;λ——自由空間的波長;ri——第i條反射路徑的反射系數(shù);di——第i條反射路徑的路徑長度。
第i條反射路徑的反射系數(shù)為:
式中:rh——天線的平行極化反射系數(shù);θi——電波入射角;rv——天線的垂直極化反射系數(shù)。
其中,
式中:εr——室內(nèi)墻壁的相對介電常數(shù);ε——室內(nèi)墻壁的復(fù)介電常數(shù);δ——電導(dǎo)率[15]。
在射線跟蹤算法中,最核心的部分是尋找在環(huán)境中的有效路徑,尋徑方式有兩種:鏡像法和射線彈跳法。其中,因?yàn)樯渚€彈跳法的準(zhǔn)確度受到接受球半徑大小等因素的影響,所以本次研究選擇了計(jì)算簡單且準(zhǔn)確度高的鏡像法。
鏡像法基于幾何光學(xué),通過反射定律計(jì)算傳播路徑,其基本思想如圖1 所示。主要研究在室內(nèi)環(huán)境中的直射、一次反射和二次反射的路徑。為了確定從發(fā)射端Tx 到接收端Rx 的有效路徑,首先通過Tx 和Rx 的坐標(biāo)位置直接確定直射路線,其中d為Tx 到Rx 的直線距離;通過發(fā)射點(diǎn)Tx 相對于墻的反射鏡像點(diǎn),找到所在墻面上的反射點(diǎn),從而找到經(jīng)過一次反射的有效路徑,其中r1為發(fā)射端到反射點(diǎn)的距離,r2為反射點(diǎn)到接收端的距離;之后,通過鏡像點(diǎn)的坐標(biāo)和另一面墻的位置即可得到二次反射鏡像點(diǎn),通過這兩個點(diǎn)的位置即可確定兩次反射點(diǎn)的坐標(biāo),從而確定經(jīng)過兩次反射的有效路徑,其中s1為發(fā)射端到第一次反射點(diǎn)的距離,s2為第一次反射點(diǎn)到第二次反射點(diǎn)的距離,s3為第二次反射線到接收端的距離。以此方法,通過發(fā)射端和接收端以及墻體的位置計(jì)算室內(nèi)環(huán)境中所有的有效路徑。

圖1 鏡像法尋徑方式圖Fig.1 The method of mirror path finding
3 射線跟蹤改進(jìn)算法
在以往的研究中,因多條射線經(jīng)過多面墻體透射或經(jīng)過多次反射到達(dá)接收端,使得路徑損耗過大直接影響了模型準(zhǔn)確度。為了解決這個問題,本文基于十射線模型對算法進(jìn)行優(yōu)化,通過限定射線透過墻體的數(shù)量以及每條射線的反射次數(shù),選出最佳的十條有效路徑,具體步驟如圖2 所示。

圖2 十射線模型算法流程圖Fig.2 Flowchart of the ten-ray modeling algorithm
步驟1:通過激光測距儀對測試環(huán)境數(shù)據(jù)進(jìn)行測量,記錄墻面位置,將環(huán)境數(shù)據(jù)導(dǎo)入MATLAB 中,初始化邊界條件;輸入發(fā)射端Tx 和接收端Rx 的位置以及發(fā)射功率、介電常數(shù)、導(dǎo)電率等實(shí)驗(yàn)參數(shù),對室內(nèi)實(shí)驗(yàn)環(huán)境進(jìn)行建模;
步驟2:通過步驟1 的各項(xiàng)參數(shù),分別計(jì)算直射路徑、經(jīng)過一次反射的路徑以及經(jīng)過兩次反射的路徑。首先計(jì)算直射路徑,將收發(fā)端直線相連并記錄。之后計(jì)算經(jīng)過一次反射路徑,逐一計(jì)算出發(fā)射點(diǎn)對于每面墻的投影,判斷該投影是否在所計(jì)算的墻面上,符合要求則找到對應(yīng)墻壁上的鏡像點(diǎn)Tx′的坐標(biāo),通過連接Tx′和Rx 找到一次反射點(diǎn)P,判斷P 是否在所計(jì)算的墻面上,滿足條件時(shí)連接Tx 和P以及P 和Rx,記錄所有的有效一次反射路徑。最后計(jì)算經(jīng)過二次反射的路徑,同理,使用之前記錄的Tx′的坐標(biāo)位置與每一面墻計(jì)算鏡像點(diǎn)Tx″,通過Tx″計(jì)算有效的兩次反射路徑并記錄。綜上,找出有效路徑,計(jì)算每條路徑的長度、發(fā)射端的發(fā)射角度,對每條路徑進(jìn)行電磁計(jì)算并矢量疊加,通過射線跟蹤算法計(jì)算接收端的接收場強(qiáng),并將模型可視化;
步驟3:首先判斷步驟2 產(chǎn)生的有效路徑與幾面墻體相交,僅保留發(fā)生透射不超過3 次的路徑。之后對剩下的路徑進(jìn)行電磁計(jì)算,計(jì)算每一條路徑到達(dá)接收端時(shí)的路徑損耗,并對結(jié)果排序,僅保留直射路徑、以及最優(yōu)的4 條經(jīng)過一次反射的路徑以及5 條經(jīng)過兩次反射的路徑,形成十射線模型,并對結(jié)果可視化。對十條路徑的場強(qiáng)進(jìn)行矢量疊加,計(jì)算出接收端的接收場強(qiáng)。最后計(jì)算出整個環(huán)境中的場強(qiáng)覆蓋情況,并對結(jié)果進(jìn)行可視化,從而得出更準(zhǔn)確的無線傳輸結(jié)果。綜上導(dǎo)出通用射線跟蹤算法和優(yōu)化后的十射線模型結(jié)果;
步驟4:首先使用設(shè)備對實(shí)驗(yàn)室真實(shí)數(shù)據(jù)進(jìn)行測量,得到實(shí)測數(shù)據(jù),根據(jù)Keenan-Motley 模型、ITUR P.1238 模型和Lee 模型的理論,在相同環(huán)境下進(jìn)行場強(qiáng)計(jì)算。之后將實(shí)測數(shù)據(jù)、通用射線跟蹤模型、優(yōu)化后的十射線射線跟蹤模型以及其它經(jīng)驗(yàn)?zāi)P偷挠?jì)算數(shù)據(jù)進(jìn)行整合和對比,通過MATLAB 對這些結(jié)果進(jìn)行計(jì)算和可視化分析。最后將對比結(jié)果直觀的展現(xiàn)出來。
優(yōu)化前的射線跟蹤傳播路徑如圖3 所示,通過將空間中所有路徑計(jì)算出來后可以看出,在反射中,有的路徑透射超過三面墻,甚至高達(dá)十面墻,這在現(xiàn)實(shí)情況中是無法實(shí)現(xiàn)的,會導(dǎo)致結(jié)果誤差較大,因此需要對傳播模型進(jìn)行優(yōu)化。通過算法優(yōu)化后的十射線模型結(jié)果如圖4 所示。

圖3 通用射線跟蹤模型圖 Fig.3 Model of general ray-tracing

圖4 十射線模型圖Fig.4 Model of ten-ray
4 模型驗(yàn)證與分析
4.1 數(shù)據(jù)采集和處理
以高精度北斗定位技術(shù)工程實(shí)驗(yàn)室作為實(shí)驗(yàn)環(huán)境,如圖5(a)所示,通過revit 繪制實(shí)驗(yàn)室模型,樓層基本結(jié)構(gòu)不規(guī)則,樓層平面結(jié)構(gòu)近似看作1 832 cm×2 442 cm 的長方形,高度為3 m,實(shí)驗(yàn)具體參數(shù)如表1 所示。

表1 室內(nèi)場強(qiáng)測試的實(shí)驗(yàn)參數(shù)Tab.1 Experimental parameters for indoor field strength testing
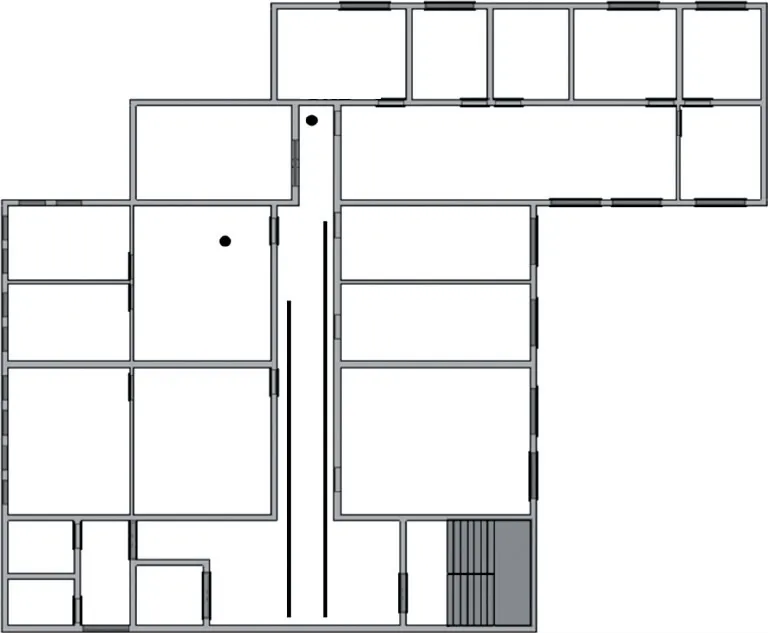
圖5 實(shí)驗(yàn)室BIM 建模與測試路線圖Fig.5 The laboratory BIM modeling and test route
為了驗(yàn)證模型仿真的可行性和準(zhǔn)確性,本次實(shí)驗(yàn)在仿真區(qū)域內(nèi)選取特定路線進(jìn)行實(shí)際測量。測試路線如圖5(b)所示,發(fā)射端設(shè)置在Tx1和Tx2,接收端測試路線為Rx1和Rx2,位置坐標(biāo)如表2 所示。

表2 收發(fā)端坐標(biāo)Tab.2 transceiver coordinates
在實(shí)驗(yàn)中,選擇Tx1和Rx1為一組,實(shí)現(xiàn)NLOS環(huán)境,選擇Tx2和Rx2為一組,組成LOS 環(huán)境。在實(shí)驗(yàn)中使用的設(shè)備如圖6 所示。

圖6 室內(nèi)場強(qiáng)測試系統(tǒng)示意圖Fig.6 Schematic diagram of indoor field strength test system
在檢測校準(zhǔn)模型預(yù)測值的準(zhǔn)確性時(shí),常使用預(yù)測結(jié)果與實(shí)際測量數(shù)據(jù)的均方根誤差ERMS作為衡量標(biāo)準(zhǔn)。均方根誤差值越小,則證明模型更準(zhǔn)確,可表示為:
式中:n——樣本數(shù)目;P0——第i個測試點(diǎn)的實(shí)際測量場強(qiáng);P——仿真預(yù)測場強(qiáng)。
4.2 模型驗(yàn)證
在LOS 情況中,將發(fā)射端置于Tx2位置,在實(shí)驗(yàn)室的預(yù)測場強(qiáng)覆蓋如圖7 所示。

圖7 視距情況下的實(shí)驗(yàn)室預(yù)測場強(qiáng)覆蓋圖Fig.7 Plot of laboratory predicted field strength coverage in the LOS case
將接收端置于Rx2路線上,對模型進(jìn)行具體分析。如圖8(a)為實(shí)測場強(qiáng)數(shù)據(jù)和通用射線跟蹤模型預(yù)測數(shù)據(jù)1 以及十射線模型預(yù)測數(shù)據(jù)2 的場強(qiáng)對比。在此基礎(chǔ)上將數(shù)據(jù)擬合,與其他室內(nèi)無線電波傳輸模型的路徑損耗值進(jìn)行對比,如圖8(b)所示,可以看出Keenan-Motley 模型、ITU-R P.1238 模型和Lee 模型的路徑損耗偏大,射線跟蹤模型整體較好,通用射線跟蹤模型的ERMS為6.654 4,校準(zhǔn)后的十射線模型的ERMS為6.240 2,在實(shí)驗(yàn)中其他室內(nèi)無線電波傳輸模型的ERMS如表3 所示,結(jié)果表明校準(zhǔn)后的模型在LOS 情況下更準(zhǔn)確。

表3 多種模型的ERMSTab.3 ERMSfor the various models

圖8 視距情況下的實(shí)測數(shù)據(jù)與預(yù)測數(shù)據(jù)分析圖Fig.8 Plot of measured versus predicted data analysis for the LOS case
在NLOS 情況中,將發(fā)射端置于Tx1位置,在實(shí)驗(yàn)室的預(yù)測場強(qiáng)覆蓋如圖9 所示。

圖9 非視距情況下的實(shí)驗(yàn)室預(yù)測場強(qiáng)覆蓋圖Fig.9 Plot of laboratory predicted field strength coverage in the NLOS case
在NLOS 環(huán)境中,將接收端置于Rx1路線上。如圖10(a)為實(shí)測場強(qiáng)數(shù)據(jù)和通用射線跟蹤模型預(yù)測數(shù)據(jù)1 以及十射線模型預(yù)測數(shù)據(jù)2 的場強(qiáng)。與LOS 情況相似,在距離發(fā)射端13 m 的位置處于走廊交匯處出現(xiàn)波動。在此基礎(chǔ)上與Keenan-Motley 模型、ITU-R P.1238 模型和Lee 模型的路徑損耗值進(jìn)行對比,如圖10(b)所示,可以看出Keenan-Motley模型和Lee 模型的路徑損耗偏大,ITU-R P.1238 模型相對好一些,射線跟蹤模型較好,對優(yōu)化前后的射線跟蹤模型進(jìn)行對比,通用射線跟蹤模型的預(yù)測數(shù)據(jù)1 的ERMS為5.660 5,校準(zhǔn)后的十射線模型的預(yù)測數(shù)據(jù)2 的ERMS為5.533 9,結(jié)果表明校準(zhǔn)后的模型在NLOS 情況下,準(zhǔn)確度也更高。

圖10 非視距情況下的實(shí)測數(shù)據(jù)與預(yù)測數(shù)據(jù)分析圖Fig.10 Plot of measured versus predicted data analysis for the NLOS case
在實(shí)驗(yàn)中室內(nèi)無線電波傳輸模型的ERMS如表3所示。
5 結(jié)束語
針對室內(nèi)傳輸模型的優(yōu)化,提出一種改進(jìn)的射線跟蹤算法。基于十射線模型進(jìn)行校準(zhǔn),通過視距和非視距兩種環(huán)境下對通用模型以及十射線模型的預(yù)測數(shù)據(jù)進(jìn)行分析,結(jié)果表明,經(jīng)過校準(zhǔn)的十射線模型在均方根誤差方面有更優(yōu)的效果,準(zhǔn)確度更高。之后,還將該算法與常用室內(nèi)電波傳輸模型,如Keenan-Motley 模型、ITU-R P.1238 模型和Lee 模型的路徑損耗進(jìn)行對比,表明該算法具有更高的準(zhǔn)確度。
優(yōu)化后的射線跟蹤算法模型可為室內(nèi)微波頻段包括室內(nèi)5G 頻段信號場強(qiáng)覆蓋情況提供標(biāo)準(zhǔn)和指導(dǎo),為室內(nèi)信號覆蓋優(yōu)化提供理論依據(jù),提高室內(nèi)通信的質(zhì)量和穩(wěn)定性,為用戶提供更好的通信體驗(yàn),同時(shí)為理論研究和模擬仿真提供數(shù)據(jù)支持,這將有助于深入研究室內(nèi)信號傳播的規(guī)律和特點(diǎn),為未來的研究和開發(fā)提供更豐富的思路和方法。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19