基于光頻標的氫原子鐘頻率駕馭系統軟件設計
2023-11-21 05:34:24徐金鋒史豐豐李國俊林勇昕
宇航計測技術 2023年5期
徐金鋒史豐豐李國俊林勇昕
(北京衛星導航中心,北京 100094)
1 引言
隨著冷原子物理、激光穩頻和飛秒光梳等技術的飛速發展,光學頻率標準(光頻標)相對頻率不確定度和頻率穩定度相繼達到E-18 水平,已遠超現行秒定義參考銫噴泉鐘[1,2]。國際計量委員會時間頻率咨詢委員會(CCTF)針對基于光頻標重新定義秒進行了多次討論,并提出了“秒的次級表示”概念:在基于光頻標重新定義秒之前,部分光頻標躍遷頻率也作為時間基準得到應用[3]。中科院精密測量院利用可搬運光鐘測量了鈣離子光頻標的躍遷絕對頻率,并多次參與國際計量局關于鈣離子光頻標躍遷頻率推薦值的計算,為中國在新的國際秒定義制定方面增加了話語權。另外,在光頻標絕對頻率測量方面,中國計量科學研究院與華東師范大學合作,利用中國計量科學研究院的銫噴泉鐘和與國際原子時之間的比對鏈路,對鍶原子光晶格鐘和鐿原子光晶格鐘進行了絕對頻率測量,其測量結果被CCTF 采納,為國際秒的次級表示光頻躍遷頻率的定值做出了貢獻[4]。
原子鐘頻率駕馭是時間產生和保持中的關鍵環節,一個理想的參考基準是實現頻率駕馭的基礎[4]。目前,以銫噴泉鐘、銣噴泉鐘等基準鐘為參考的原子鐘駕馭技術比較成熟,光頻標在原子時標駕馭方面的應用還處于起步探索階段。在基于光頻標和氫原子鐘構成的時間系統中,以光頻標為時間基準進行氫原子鐘頻率駕馭,可以獲得具有較高頻率準確度和頻率穩定度的時間頻率信號,但也面臨需要解決光頻標運行率低帶來的測量數據跳變、缺失等問題。因此,利用網絡通信、虛擬儀器、計算機數據處理等技術,開發了基于光頻標的氫原子鐘頻率駕馭系統軟件,在具有測量儀器控制、數據采集存儲、圖形化顯示等傳統功能的同時,能夠承擔測量數據異常值較多情況下的氫原子鐘性能評估、駕馭控制等任務,實現了氫原子鐘頻率駕馭的自動控制。
2 硬件系統介紹
以光頻標為基準的時間系統主要由光頻標、氫原子鐘、光梳、頻率計數器、計算機等設備組成,基本架構如圖1 所示。光頻標直接輸出的頻率是參考原子躍遷附近的頻率,為了能夠與微波頻率進行比對,利用光梳實現將特定光學頻率轉換到微波頻率范圍[4]。被測氫原子鐘的10 MHz 頻率信號輸入到光梳,利用光頻標作為參考源,其輸出的躍遷光通過光纖傳輸至拍頻光路,在拍頻光路中與光梳的輸出光進行拍頻。拍頻信號通過探測器轉化為電信號,再通過同軸電纜傳遞至光梳用于反饋,經過濾波、鎖相等相關操作后,光頻標的頻率穩定度傳遞至光梳輸出的高頻射頻信號。
實時采集處理頻率計數器的測量數據,可以對氫原子鐘頻率準確度、漂移等特性進行精確評估,進而建模計算得到氫原子鐘的系統變化趨勢。最終,通過對氫原子鐘輸出信號進行頻率駕馭,實現高準確度的實時信號輸出。為了保障氫原子鐘的自由運行,不直接對原子鐘的變化趨勢進行駕馭,而是通過相位微躍器進行頻率和相位的改正,消除其系統變化[5]。為驗證駕馭效果,駕馭后的信號MC1 利用比相儀與某標準時間信號MC2 進行比對,并通過分析比相儀的測量數據實現駕馭效果的評估。
3 軟件功能實現
3.1 軟件開發環境
基于光頻標的氫原子鐘頻率駕馭系統軟件運行于Windows 平臺,要求具有儀器設備控制和數據處理分析兩項基本功能。基于系統配置的頻率計數器、相位微躍器、比相儀等設備均支持網絡通信的特點,軟件開發采用模塊化設計思路,把各種軟件功能對象化并進行封裝[6]。軟件采用基于Visual Studio 2015 平臺的VC ++語言,與操作系統和硬件平臺的兼容性、交互性較好,能夠兼顧軟件運行效率和接口統一。由于系統處理的數據量較大,數據庫選擇Oracle 11g,軟件通過Oracle 客戶端能夠方便地進行前后臺數據的存儲、查詢等操作。另外,軟件利用可互換虛擬儀器驅動對53230A 型頻率計數器等通用設備進行控制,開發環境需要預先安裝相應的IO 驅動程序。
3.2 軟件流程設計
為了滿足不同的測量與控制的需求,系統軟件主程序分為全自動模式和人工參與模式。全自動模式下,用戶在配置文件中預先設置儀器IP 地址或者Visa 地址、數據取樣間隔、計算周期等參數信息,軟件啟動后全程自動運行,完成測量數據讀取、處理及結果存儲。人工參與模式下,用戶可以任意選擇數據取樣間隔、計算周期進行數據分析,并可手動對設備運行參數進行設置。軟件流程圖如圖2 所示。
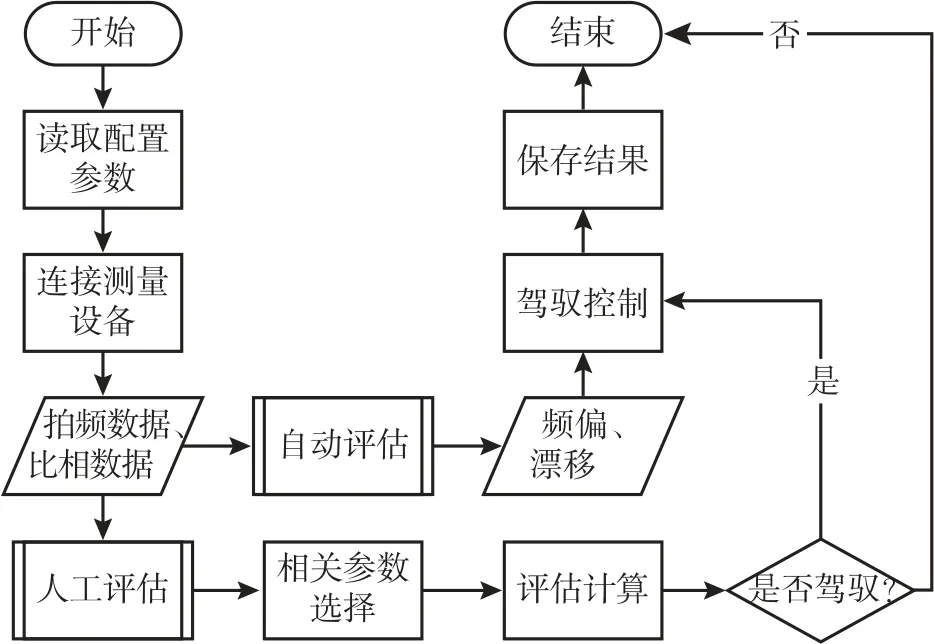
圖2 軟件執行流程圖Fig.2 Flow chart of program execution
3.3 軟件主要功能模塊
3.3.1 參數配置模塊
為增強軟件的通用性,參數配置模塊通過文件方式對軟件自動運行的相關參數進行初始化配置。在系統總體框架不變的情況下,用戶可以通過編輯配置文件,改變測量儀器地址、原子鐘編號、數據庫服務名稱、駕馭生效時刻等參數,以適應系統硬件設備更換和運行控制參數調整。正確設置參數后,軟件啟動時能夠自動加載配置文件,建立與設備的通訊連接,開啟自動化運行。
3.3.2 數據采集模塊
數據采集模塊主要負責通過網絡與設備進行數據交互,鑒于設備種類不同、協議不同,針對不同協議的設備采用不同的處理機制:
1)針對通過TCP/UDP 協議主動上報數據的設備,軟件通過設置設備的IP 和端口號,開啟端口監聽的方式,接收設備上報到特定端口的數據;成功接收數據后,再通過匹配監聽的設備IP 和端口號,獲取設備解析協議,對設備上報數據進行解析,并按照時間順序將數據存儲到數據庫;
2)針對通過可互換虛擬儀器驅動獲取數據的設備,軟件通過設置設備IP 地址或者Visa 地址,啟動定時查詢任務獲取設備數據。成功接收數據后,再通過匹配監聽的設備地址信息,獲取設備解析協議,對設備上報數據進行解析,并按照時間順序將數據存儲到數據庫。在編程期間,對可互換虛擬儀器設備的訪問是通過其IP 地址字符串實現,軟件支持套接字和VXI-11 兩種連接協議,為進一步提高性能,優先選擇使用套接字協議。以頻率計數器數據采集為例,通過軟件界面可以實時顯示拍頻數據,如圖3 所示。
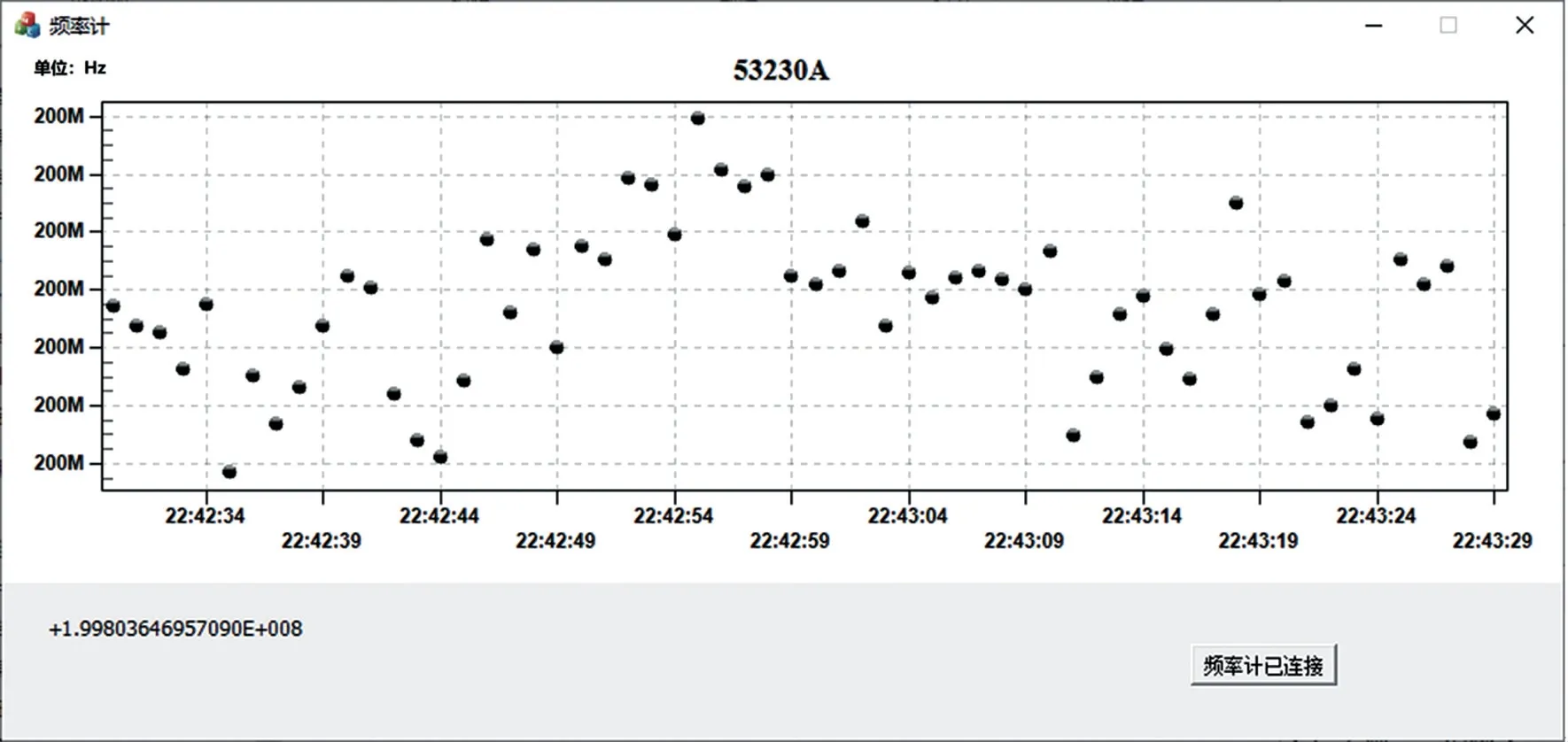
圖3 頻率計數器數據采集界面圖Fig.3 The interface of frequency counter data acquisition
3.3.3 駕馭控制模塊
氫原子鐘具備較好的短期頻率穩定性和低噪聲性,但同時伴有長期漂移,因此更好駕馭氫原子鐘的重點在于如何扣除長期漂移[7],一般采用二次多項式模型來實現。鑒于光頻標的穩定度和準確度都優于氫原子鐘,利用光頻標駕馭自由運行的氫原子鐘,將其輸出信號頻率在一定誤差范圍內向光頻標靠攏,可以得到較高準確度和穩定度的微波信號。駕馭控制過程中,由于受到光頻標運行率、氫原子鐘性能或測量設備的影響,原始采集的測量數據不可避免地存在粗差、缺失和跳變等異常,需要通過控制算法對數據的異常點進行檢測,確保數據的正確完好,從而避免受駕馭信號穩定度的降低[8,9]。數據異常值的處理主要采用中位差(Median Absolute Deviation,MAD)方法:將頻率數據yi的絕對值與頻率數據序列的中數(Median)m和MAD 的若干倍之和相比較,當測量數據滿足式(1)時,就認為數據點yi是異常的粗差點。
式中:n——整數倍數,根據系統工作需要,其取值設為5;median——求取一組數據序列的中數。
與常規的MAD 方法不同,軟件探測出異常數據后,將其對應的頻率數據設為空,不對數據序列進行插值處理,從而避免了引入新的數據造成原始數據的失真。數據序列剔除粗差后,將其轉化為相位數據進行原子鐘頻率偏差擬合預報[10]。駕馭控制界面如圖4 所示,軟件每日利用剔除粗差的拍頻數據計算出氫原子鐘與光頻標的相對頻率偏差,進而控制相位微躍器的輸出頻率。
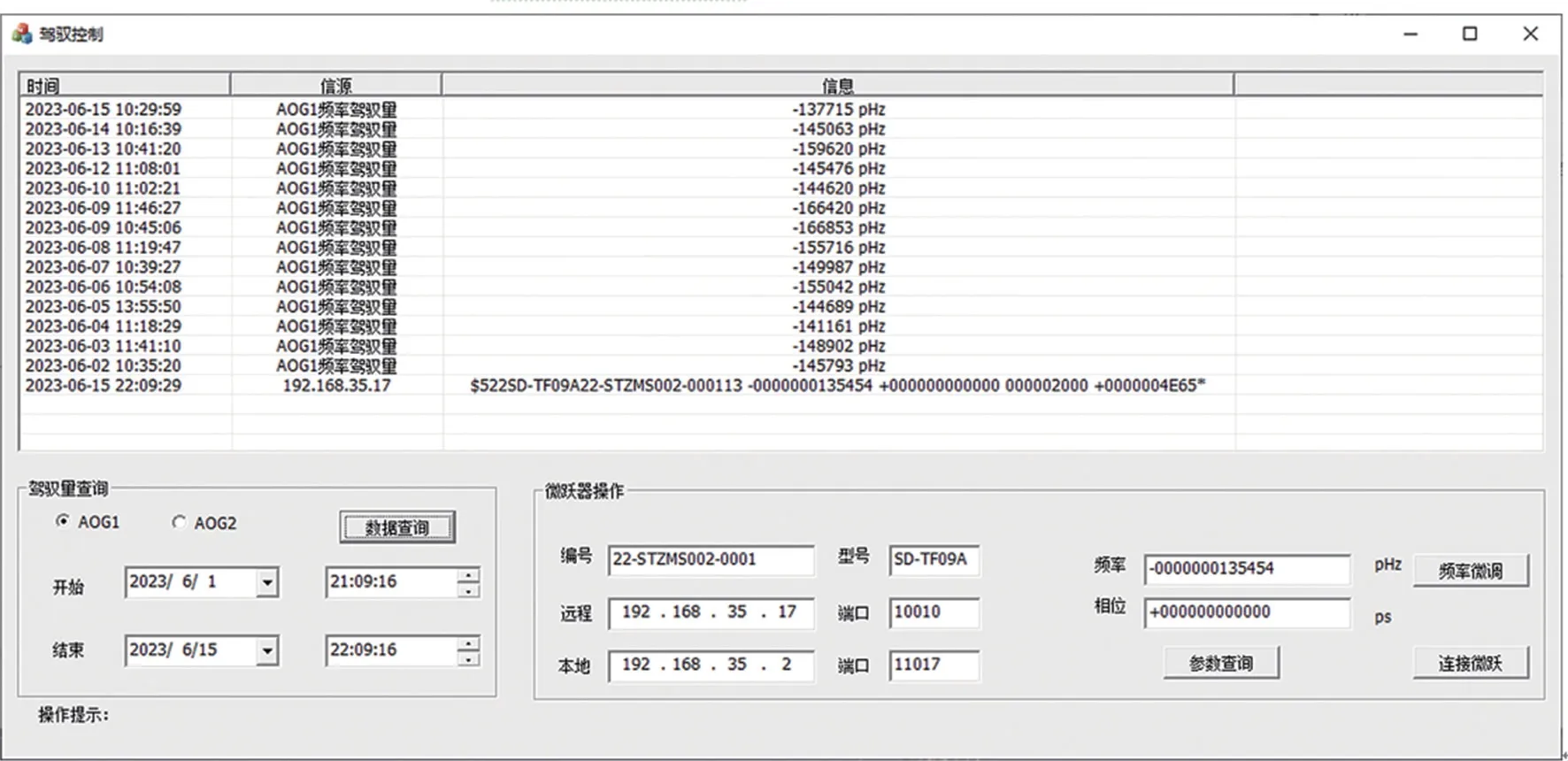
圖4 氫原子鐘駕馭控制界面圖Fig.4 The interface of hydrogen maser's frequency steering
3.3.4 分析評估模塊
評估模塊使用Alglib 數值分析和數據挖掘函數庫,能夠高效地進行插值、最小二乘擬合等運算,實現對氫原子鐘運行特性的評估,評估結果以圖形形式在軟件界面呈現,生成的圖形可以保存為圖片文件。為展示軟件利用最小二乘擬合評估氫原子鐘準確度和漂移率的效果,自由運行氫原子鐘clock1相對于參考時標MC2 的鐘差和殘差曲線如圖5 所示,取樣區間1 個月,取樣間隔1 min。駕馭后的信號MC1 相對于參考時標MC2 的頻率穩定度結果如圖6 所示,取樣區間1 個月。
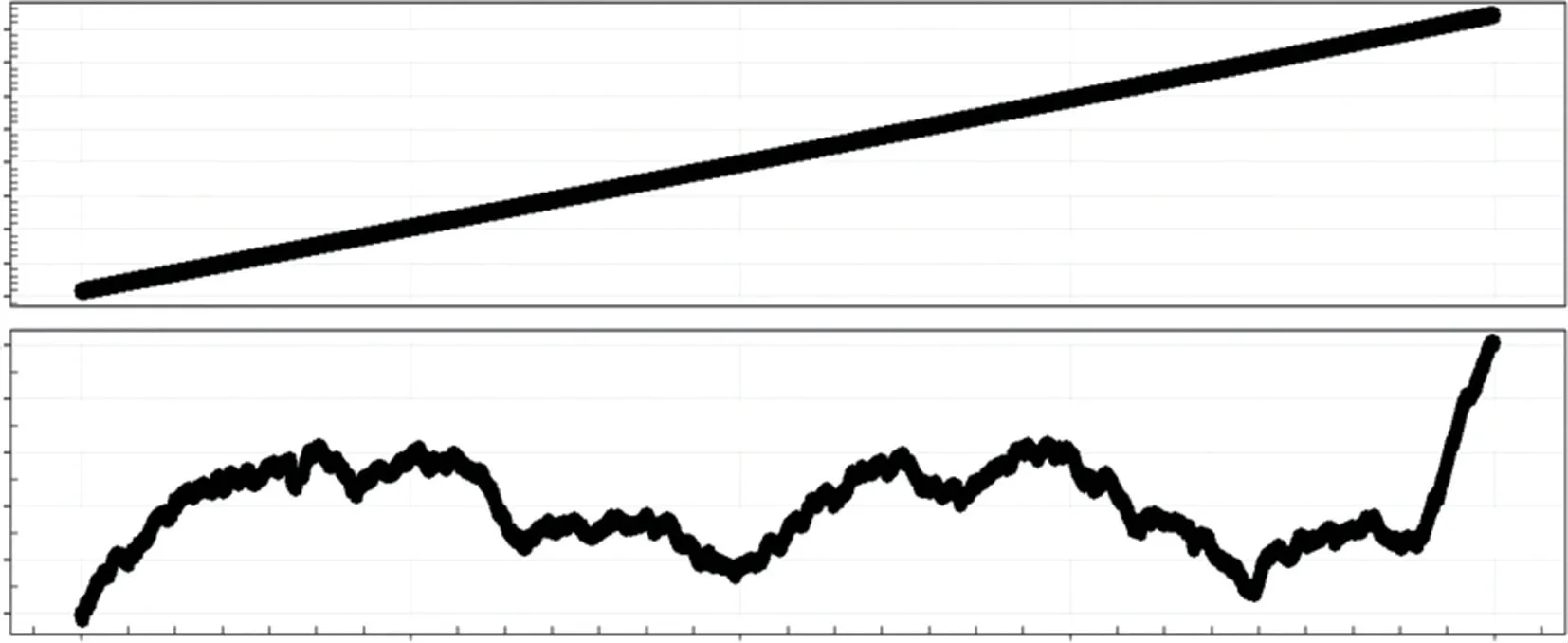
圖5 clock1 相對于MC2 鐘差曲線圖Fig.5 The curve of clock bias between clock1 and MC2

圖6 MC1 相對于MC2 頻率穩定度結果圖Fig.6 The frequency stability results of MC1 in reference to MC2
3.3.5 數據存儲模塊
數據存儲模塊用于存儲測量數據和數據處理結果。針對系統中的Oracle 數據庫,軟件采用ADO方式建立應用程序層接口。ADO 庫是一組組件對象模型(COM)動態庫,封裝了數據庫底層接口,以統一的方式訪問存儲在不同信息源中的數據,其優點是易于使用、速度快、內存支出少和磁盤遺跡小,能夠為軟件前端和數據源之間提供輕量、高性能的接口,從而減少網絡流量。軟件在調用ADO 前,通過引入ADO 庫定義文件,初始化OLE/COM 庫環境,并通過Connection 對象執行SQL 命令,或利用Recordset 對象取得結果記錄集進行數據查詢、處理。通過數據查詢界面可以高效地查詢數據庫中存儲的光梳拍頻數據,如圖7 所示。
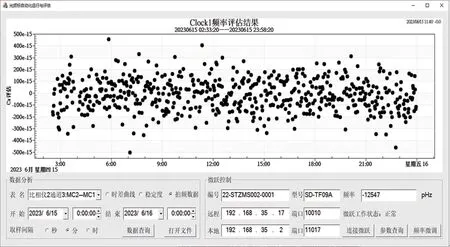
圖7 氫原子鐘頻率數據查詢界面圖Fig.7 The interface of hydrogen maser's data query
4 軟件測試與分析
基于光頻標的氫原子鐘頻率駕馭系統軟件設計和開發完成后,通過軟件和硬件的配合,系統實現了設備的自動化控制和測量數據的實時采集處理,降低了人工處理數據造成的失誤率,減輕了系統運維人員的工作強度。2023 年7 月~9 月,基于硬件系統進行光頻標駕馭氫原子鐘測試驗證,軟件每日自動計算氫原子鐘的頻率偏差值,將計算得到的頻率偏差值發送到相位微躍器上,可實現對氫原子鐘的頻率駕馭。通過與外部UTC 比對進行駕馭效果的驗證,兩個月時間內光頻標的有效運行率為80%,氫原子鐘駕馭后的信號MC1 與UTC 的時差絕對值小于2.5 ns,如圖8 所示。時差值波動的原因主要是氫原子鐘頻率駕馭量的變化和比對鏈路噪聲引入的不確定度。同時,MC1 與UTC 之間存在頻率偏差,反映出當前的駕馭系統還存在一定的系統偏差,需要在后續工作中進行優化。

圖8 MC1 與UTC 的時差結果圖Fig.8 The time difference between MC1 and UTC
5 結束語
針對光頻標和氫原子鐘構成的時間系統,開發了基于光頻標的氫原子鐘頻率駕馭系統軟件,對其測量儀器控制、數據采集分析、原子鐘評估等功能進行了規劃設計。軟件采用VC ++語言,基于Visual Studio 2015 平臺,界面簡潔,操作簡單,具備良好的可移植性和可擴展性。經過測試驗證,軟件運行穩定,在光頻標的有效運行率為80%的條件下,氫原子鐘駕馭后產生的時間信號與UTC 的同步精度小于2.5 ns。在現有軟件系統基礎上,未來將研究改進光梳拍頻數據有效性的篩選策略和測量噪聲分析方法,進一步提升光頻標評估氫原子鐘特性的準確性。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
工業設計(2016年12期)2016-04-16 02:52:00
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21