基于修正瑞利分布的S/Ka雙頻天線捕獲概率分析
2023-11-18 05:35:40章鵬飛劉軍鋒曾凡鵬魯高飛潘胤圭
中國空間科學技術 2023年5期
章鵬飛,劉軍鋒,曾凡鵬,魯高飛,潘胤圭
1.宇航動力學國家重點實驗室 西安 710043 2.西安衛星測控中心 西安 710043
1 引言
隨著遙感技術的快速發展,星地通信鏈路中海量數據傳輸的需求與日劇增。由于星地可見弧段時長,通過增加數據傳輸速率已成為星地數據傳輸的必然趨勢。當碼速率增加到Gbit/s量級傳輸要求時,星地數據傳輸需要更高的信道帶寬。因此,從X頻段向更高的Ka頻段拓展已成為當前數傳測控發展的一種趨勢[1-3]。
高頻率、大口徑天線波束極窄,且低軌衛星的運動速度較快,對Ka頻段天線系統的高精度指向及快速捕獲跟蹤能力提出了更高要求。以12m口徑天線為例,工作在Ka頻段下行25GHz時,其天線半功率波束寬度為0.07°,相比于工作在S頻段時的半功率波束寬度變窄了1/12以上,相比于X頻段的半功率波束寬度變窄了1/2.5以上[4]。對于極窄Ka頻段波束天線,在低仰角捕獲跟蹤或跟蹤丟失后重捕目標,利用Ka頻段直接進行目標捕獲和自跟蹤通常十分困難[5]。工程實踐上一般采用寬波束S頻段進行捕獲、穩定自跟蹤后再引導Ka頻段進行目標捕獲后自跟蹤[6-8]。若S頻段信標出現故障或其他因素造成S頻段星地鏈路故障的情況,將無法實現S自跟蹤引導Ka捕獲,為此天線系統通常還具備Ka頻段直接搜索捕獲功能。綜上論述,需要從理論和試驗上闡明在什么條件下以及S頻段引導跟蹤及程引捕獲模式如何切換,才能保證Ka頻段捕獲成功。
基于工程任務要求,本文對不同模式下的Ka頻段成功捕獲條件和影響因素進行分析,建立一種近似為修正瑞利分布的捕獲概率模型。隨后基于捕獲概率模型對S頻段跟蹤精度、電軸一致性和搜索捕獲范圍等影響因素進行了敏感性分析,最后利用實際跟蹤數據進行了驗證,為有效提高Ka頻段捕獲跟蹤能力提供分析依據。
2 天線捕獲模式分析
天線對目標的捕獲通常包括兩個階段。首先引導天線指向目標位置附近,然后天線系統對目標信號進行檢測,并根據信號檢測誤差實現對目標的閉環跟蹤[9-12]。通常前者稱為目標引導,后者稱為目標截獲。天線對目標捕獲概率取決于目標引導落入概率與目標截獲概率之積。其中,截獲概率主要取決于目標的運動動態特性和天線跟蹤系統的動態性能。

HPBW與天線工作波長λ及天線口徑D有關,通常可按如下式近似表示:
式中:c為光速;f為工作頻率。表1給出了典型口徑天線及工作頻率天線的半功率波束寬度。

表1 不同頻率不同口徑天線的半功率波束寬度Table 1 Half-power beam-width of antennas with different apertures at different frequencies
由表1可知,天線口徑D越大,工作頻率f越高,則天線波束寬度越窄。對于相同口徑天線而言,Ka頻段的半功率波束寬度比S頻段的半功率波束寬天線縮窄了一個數量級。當衛星目標的軌道預報誤差約為0.015°,工程系統天線靜態指向誤差約為0.04°時,天線接收系統實現Ka頻段直接捕獲目標并轉入自跟蹤極具挑戰。
因此為保證天線接收系統高質量對Ka頻段的捕獲跟蹤,通常采取如下兩種方式:一是程序引導天線,實現S頻段捕獲并自跟蹤,利用S頻段跟蹤位置引導Ka頻段捕獲跟蹤,如圖1所示。另一種是程序引導加上天線掃描搜索實現Ka頻段直接捕獲跟蹤,圖2表示在程序引導的基礎上天線偏置一定角度進行目標信號搜索。前一種方式主要與S頻段的跟蹤精度和S/Ka頻段的波束關系有關[13-15]。后一種方式需要考慮天線指向精度、目標位置預報精度所確定的掃描區域以及掃描方式。綜上可知在上述兩種捕獲方式中,均與天線相關因素有關,因此需要研究上述因素在什么條件下,才能滿足Ka波段捕獲的要求。下面在兩種捕獲方式下,考慮各因素統計特性,對天線Ka頻段捕獲性能進行定量評估。
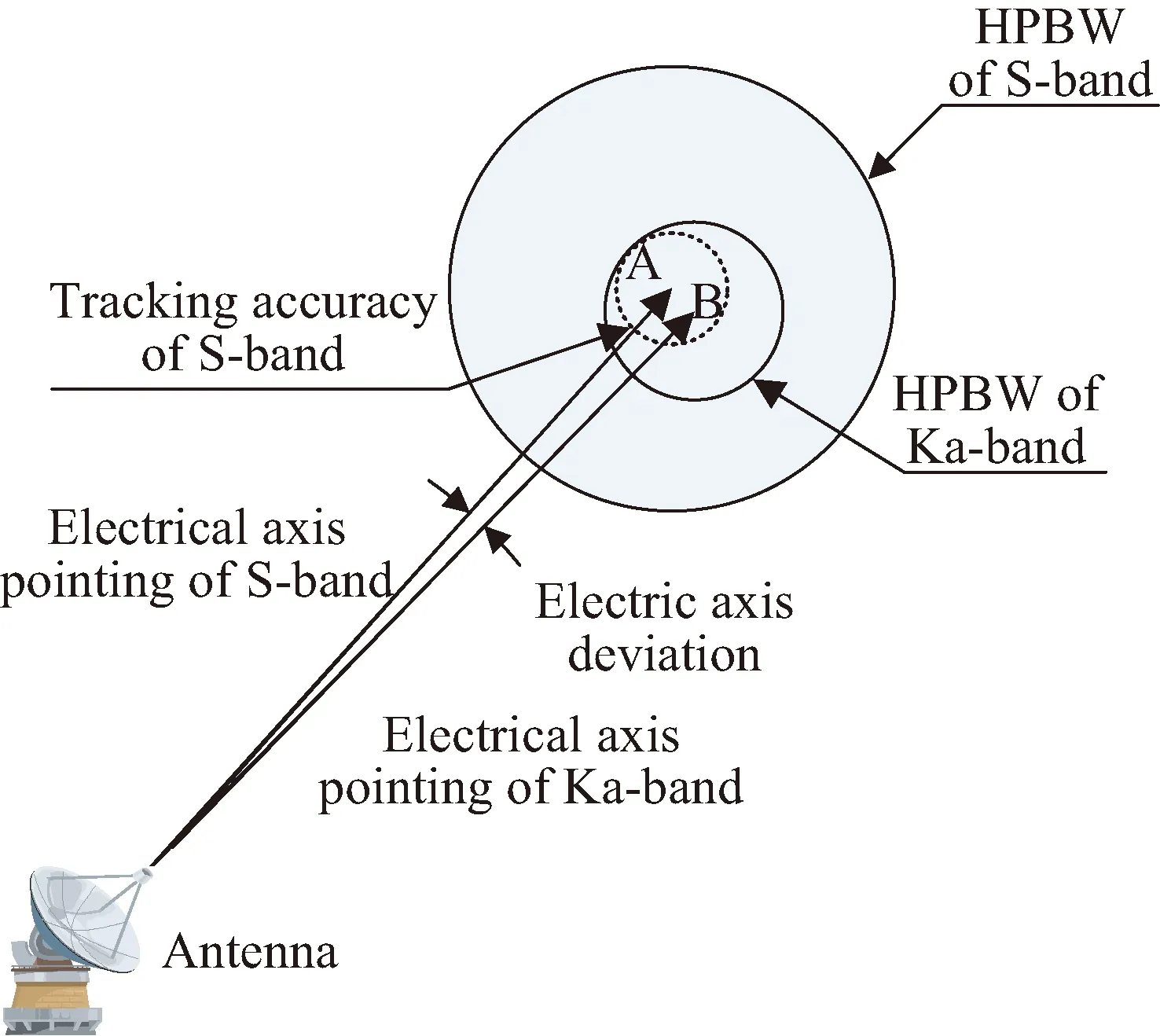
圖1 S頻段引導Ka捕獲跟蹤示意Fig.1 Schematic diagram of S-band guided Ka acquisition and tracking
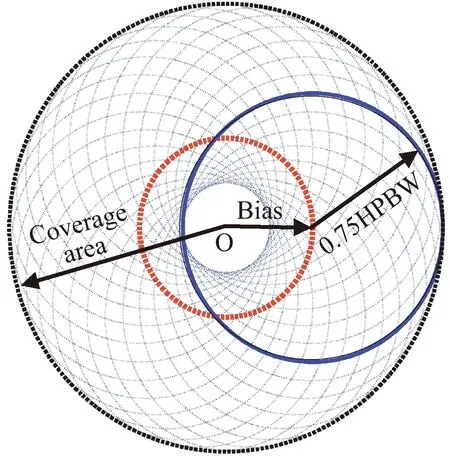
圖2 偏置搜索一圈的覆蓋范圍示意Fig.2 The coverage area diagram obtained after biased searching one circle
3 捕獲概率模型
要實現Ka頻段目標的高精度指向控制、穩定跟蹤,保證天線的指向控制精度是前提和關鍵。為了滿足天線可靠跟蹤目標任務需求,除需在設計建造安裝天線時提供高精度、高性能的天線座架及傳動系統外,通常利用伺服系統對指向誤差進行模型實時修正補償來提高天線的指向精度[16-18]。此外,目標捕獲還與衛星軌道預報精度和大氣對電磁波折射的影響相關。
對于衛星目標而言,考慮由星歷軌道根數轉換得到的位置精度會在一定范圍內帶來天線的指向引導偏差。假設目標相對天線位置ρm=[xmymzm]T,則天線的測角觀測方程可表示為
式中:Am和Em分別為天線觀測目標的引導方位和引導俯仰。假設星歷軌道根數導致的引導方位和引導俯仰分別存在引導偏差dAm和dEm,上述方位角和俯仰角的引導偏差在經過指向模型修正后可能會引入額外的指向偏差。對該偏差影響量進行定量分析,假設方位、俯仰指向引導偏差均為0.015°,根據文獻[16]中天線指向修正模型以及相應的標校系數,計算不同方位與俯仰的模型修正偏差量如圖3所示。
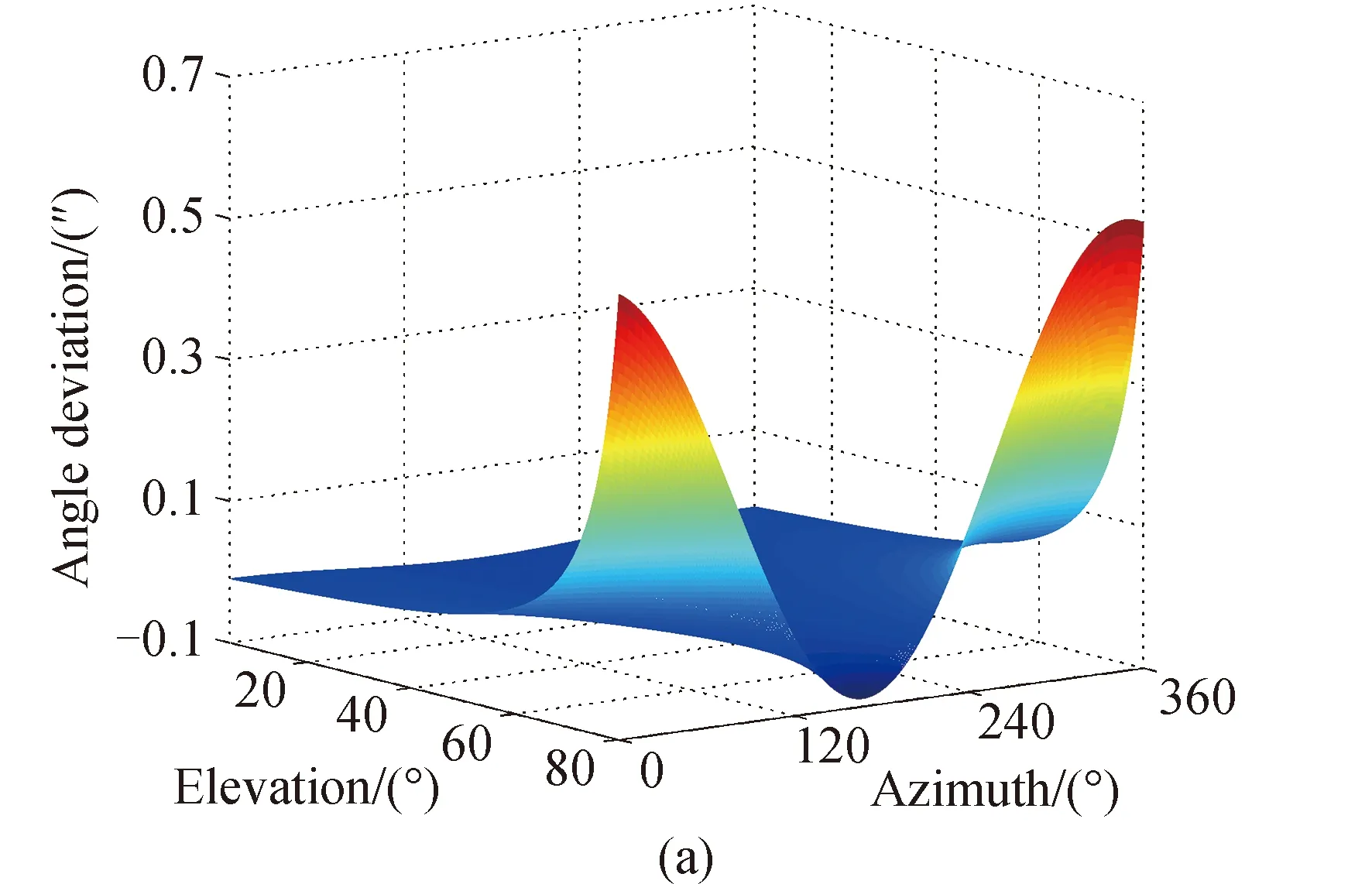
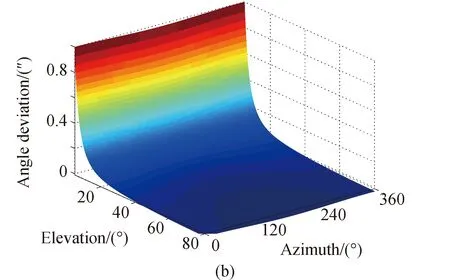
圖3 模型修正的補償偏差量Fig.3 Compensation deviation for model correction
由圖3可知,在方位與俯仰偏差為0.015°情況下,模型修正量本身的補償偏差不超過1″。因此引導偏差引起天線指向偏差主要來源于軌道誤差本身,修正模型的影響可以忽略不計。
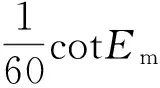
圖4 不同溫度下的兩種模型折射修正量差值Fig.4 The difference between the two models of refraction corrections at different temperatures
由圖4可知,當氣壓與濕度保持不變時,俯仰角越低,兩個模型修正量相差越大;俯仰角超過20°后,兩者折射角相差較小且變化平緩。對于不同大氣壓以及相對濕度而言,在低仰角情況下也有類似的特征。因此天線在低仰角捕獲目標時需要考慮大氣環境的影響,上述修正偏差在一定時間段內,可視為天線指向的系統誤差。
此外天線在跟蹤過程中受伺服環路控制的影響,其跟蹤角誤差也存在系統誤差。綜上可知,天線跟蹤各分量參數的取值可用固定均值的系統差或無規則的隨機差來分別描述表征。根據中心極限定理可近似為互相獨立的高斯分布隨機變量,則天線指向跟蹤可表示如下:
A=A0+dA
(1)
E=E0+dE
(2)
式中:A0、E0為目標經過模型修正后的方位俯仰真值,dA、dE為天線指向跟蹤過程中方位與俯仰的誤差分量。在天線的方位俯仰(A,E)指向坐標系中,目標實際位置分布滿足:

(3)

(4)
由式(1)~(4)可知目標距天線指向中心誤差角θ可以表示為:

(5)
通常天線需要在目標進站時就需要開始捕獲,此時天線俯仰角度一般較低(E一般5°左右),此時cosE≈1。則誤差角θ可以近似為:

(6)
因此目標在指向坐標系中誤差角θ服從貝克曼分布:

(7)
式中:βA=θcosφ-μA;βE=θsinφ-μE。
為便于計算,式(7)的誤差角θ概率密度分布可近似為修正后的瑞利分布為:
(8)
式中:σ6=Ω3/16,Ω3為θ2的3階中心矩。
由概率密度公式(8)可知天線跟蹤捕獲目標的概率F(θ)計算如下:
式中:θ0為積分上限。由第2節可知,對于天線引導捕獲,積分上限θ0等于0.75HPBW。對于天線引導疊加沿著某一軌跡搜索捕獲,其搜索軌跡的覆蓋范圍為單點覆蓋區域使用“或”運算進行包絡疊加。對于采用圖2所示偏置圓形路徑搜索,當偏置量θb≤0.75HPBW時,覆蓋范圍為圓形掃描軌跡的外包絡,則積分上限θ0等于θb+0.75HPBW。
4 捕獲概率校驗分析
4.1 捕獲概率估算
以典型Ka頻段的HPBW=0.069°,S波段HPBW=0.778°為例,且σA=σE?σ0計算不同誤差量對應的概率分布下,S、Ka頻段的捕獲概率如圖5所示。
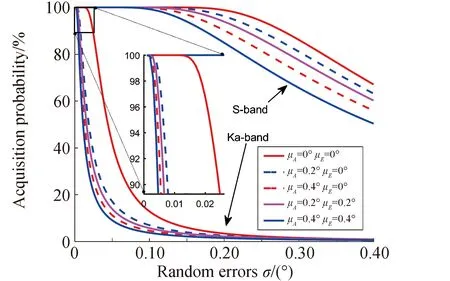
圖5 不同誤差概率分布下S、Ka頻段的捕獲概率Fig.5 Acquisition probability of S and Ka bands under different error probability distributions
由式(8)可知,dA、dE在低仰角的情況下的影響作用具有對稱一致性,因此圖5中μA=0.2°,μE=0°的捕獲概率曲線也可代表μA=0°,μE=0.2°時的分析結果。由圖5可知,天線在相同的工作模式如程序引導中,指向誤差對Ka頻段的捕獲影響遠超對S頻段捕獲影響。當天線引導指向隨機差σ0優于0.1°時,此時S頻段的捕獲概率已接近100%。而此時Ka頻段的捕獲概率仍低于20%。當天線引導指向隨機差σ0優于0.025°,此時Ka頻段的捕獲概率才會達到90%。此外,隨機差變化對捕獲概率的影響相比系統差而言影響更為顯著,如當μE=0°,σ0=0.2°,而μA=0.2°變化至μA=0.4°時,S頻段的捕獲概率降低6%,而當μE=0°,μA=0.2°或0.4°,而σ0=0.2°變化至σ0=0.4°時,S頻段的捕獲概率降低30%以上。因此,在天線工作中需優先控制隨機偏差,同時需通過一定方式修正或控制的系統差。由以上分析可知,對于Ka頻段的有效捕獲一般采用第3節所述的兩種方式通過提高Ka頻段的引導精度或者拓展Ka頻段的積分捕獲范圍來實現對目標的捕獲概率。
4.2 自跟蹤精度對捕獲概率影響分析
首先分析不同的S頻段自跟蹤精度對Ka頻段捕獲影響。當S頻段穩定自跟蹤后,其跟蹤角誤差是平穩隨機過程,自跟蹤精度主要表征為式(3)(4)中隨機誤差項。此外對于S/Ka雙頻天線而言,多采用4個S頻段喇叭圍繞一個Ka饋源的布局形式,因此存在S與Ka的電軸不一致偏差,通常S與Ka的電軸一致性優于0.02°,加上其他系統因素等影響,會造成S頻段引導時方位、俯仰還存在一定的系統誤差。定義S頻段的HPBW與其自跟蹤精度之比為K,計算不同跟蹤精度下,S自跟蹤引導Ka頻段的捕獲概率如圖6所示。
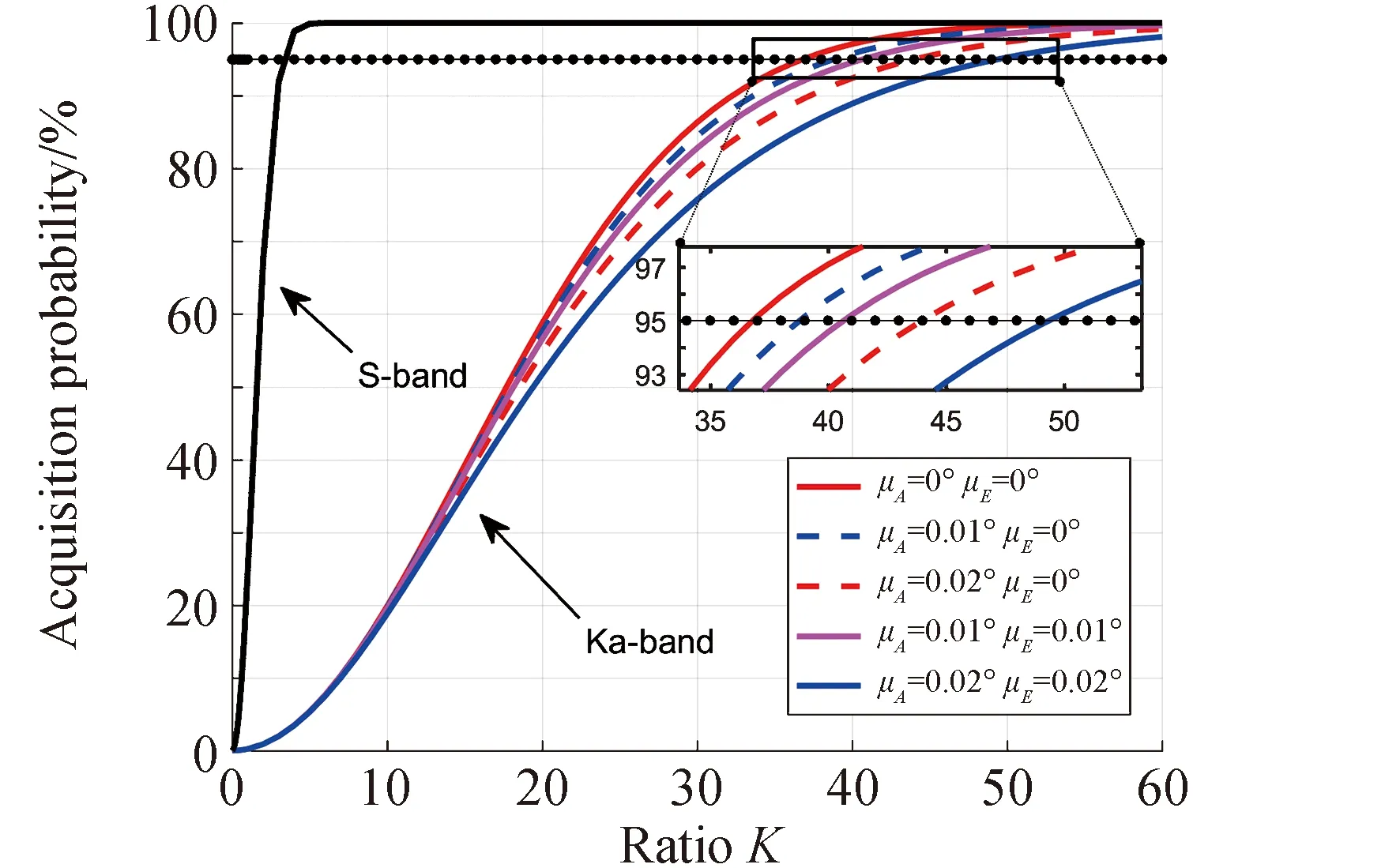
圖6 不同S自跟蹤精度下S、Ka頻段的捕獲概率Fig.6 Acquisition probability of S and Ka bands under different S self-tracking accuracy

4.3 疊加搜索捕獲分析
由第4.2小節可知,當在某些特殊情況下天線S頻段自跟蹤精度降低時,會影響Ka頻段捕獲。為了滿足捕獲要求,在S頻段自跟蹤過程中,如果沒有發現Ka頻段信號,可采用S頻段跟蹤疊加掃描的方式,即對S自跟蹤基帶輸出的誤差電壓疊加小量的直流偏置電壓,從而在天線指向空間疊加一個偏置角度,使天線形成圓形搜索,如圖7所示。以偏置Ka頻段的0.5HPBW為例,則搜索一圈的覆蓋范圍是半徑為1.25HPBW的圓形區域,計算有無角度偏置情況下,S自跟蹤引導Ka頻段的捕獲概率如圖7所示。
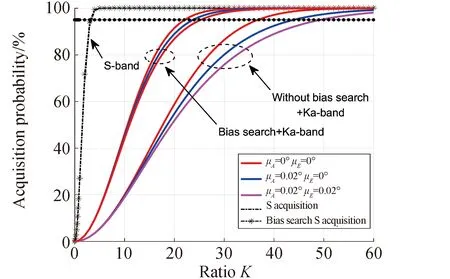
圖7 有無偏置搜索引導的S、Ka頻段的捕獲概率Fig.7 Acquisition probability of S and Ka bands with and without bias search guidance

4.4 程引偏差對引導概率的影響分析
在某些情況,無法采用S自跟蹤引導Ka捕獲,而Ka頻段自主捕獲的概率不是很高,所以天線系統通常也具備Ka頻段程序跟蹤疊加搜索捕獲方式。其搜索模式與S頻段自跟蹤引導相同,也是疊加角度偏置搜索方式。其搜索軌跡需根據覆蓋范圍的大小可采用螺旋掃描或光柵掃描等方式。以螺旋掃描、搜索范圍為圓域為例,且σA=σE?σ0,μA=μE=0計算不同搜索范圍下,Ka頻段的捕獲概率如圖8所示。
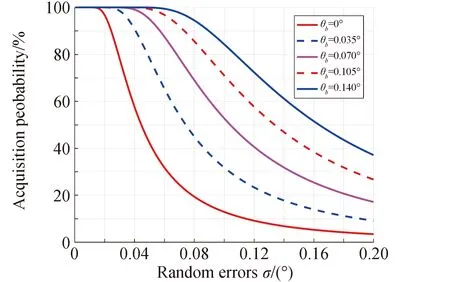
圖8 程序引導疊加搜索的Ka頻段捕獲概率Fig.8 Ka-band acquisition probability for program-guided stack search
由圖8可知,增大搜索范圍可提高發現目標的概率。當天線引導指向系統差σ0=0.04°時,此時需要偏置搜索的范圍為0.5倍Ka頻段的HPBW時,捕獲概率即可達到90%。這種情況與S自跟蹤疊加搜索類似。而當天線引導指向系統差σ0=0.1°時,此時需要偏置搜索的范圍為2倍Ka頻段的HPBW時,捕獲概率才會達到80%。但是增大搜索范圍會同時使得搜索捕獲時間延長。在實際天線跟蹤目標過程中,Ka下行信號出現時間相對有限,一味的疊加搜索往往不能達到預期效果。因此為滿足Ka頻段的捕獲任務要求,提高其引導源的精度是關鍵。進一步考慮低軌衛星高精度定軌前提下,此時天線引導的隨機差主要與天線系統本身指向系統差有關,考慮設備σ0優于0.06°的上限,對不同的偏置搜索的范圍進行分析如圖9所示。當天線引導系統差σ0=0.03°時,此時需要偏置0.018°時,捕獲概率即可達到90%。當天線引導系統差σ0=0.04°時,此時需要偏置0.038°時,捕獲概率才可達到90%。當天線系統差過大時同樣需要增大搜索范圍。綜上分析采用S頻段自跟蹤引導輔以疊加搜索捕獲是Ka頻段最優先的捕獲策略。
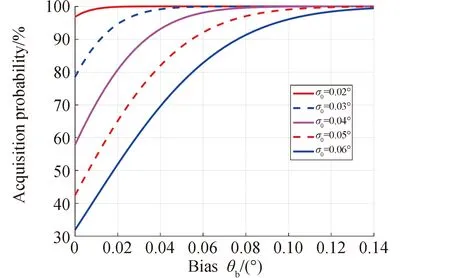
圖9 不同系統差下程序引導疊加搜索的Ka頻段捕獲概率Fig.9 Ka-band acquisition probability for program-guided stack search in difference random errors
4.5 實驗驗證
以某12m口徑設備跟蹤低軌飛行器時,S自跟蹤引導數據為例進了驗證說明跟蹤精度影響。實際選擇在跟蹤仰角6°,方位角在172°附近,跟蹤時長15s的數據,以實際跟蹤方位、俯仰角度記錄值減去預報值作為跟蹤誤差值,并經零均值化后進行總的角誤差合成,形成空間角跟蹤誤差,如圖10所示。
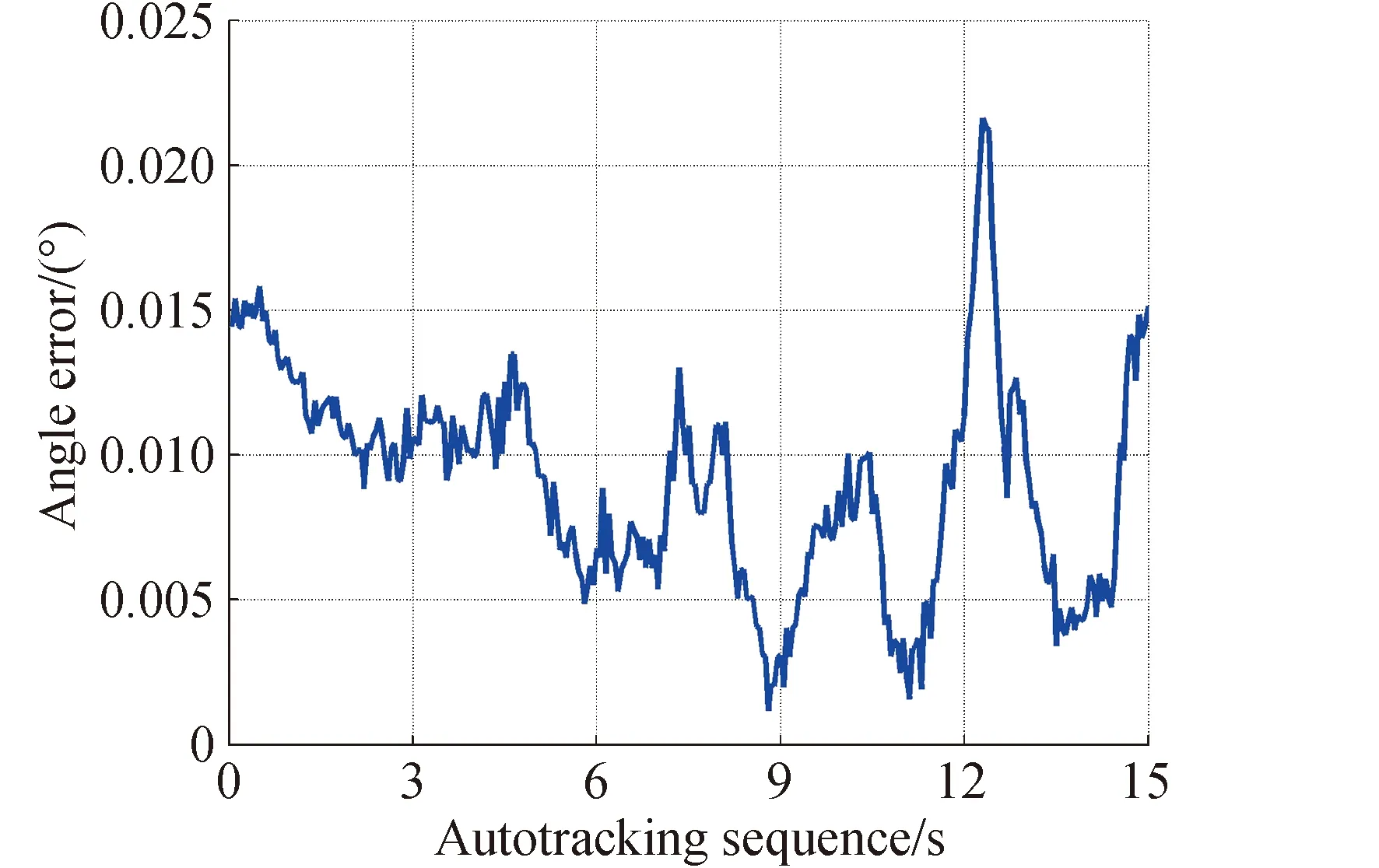
圖10 設備跟蹤空間角誤差Fig.10 The actual tracking angle error of a device
由圖10可知,S自跟蹤角誤差優于0.025°,在S半功率波束寬度1/25以內,可以滿足穩定引導Ka捕獲的要求,實際中通過鎖定指示表示也可知由S自跟蹤平穩的轉至Ka捕獲跟蹤。綜上分析可知,Ka頻段目標應優先采用S頻段自跟蹤引導下的Ka頻段捕獲方式,并輔以疊加搜索捕獲,對于直接程序跟蹤捕獲而言應需要首先根據誤差分布確定搜索捕獲范圍以保證特殊情況下盡早捕獲的任務要求。
5 結論
在現有測控工程體制應用中,采用S頻段引導Ka頻段捕獲目標可以有效解決Ka頻段難以直接捕獲的問題,但需要在目標器上增加S頻段應答機。本文建立了S/Ka雙頻天線的目標捕獲概率模型,并基于捕獲概率模型詳細分析了捕獲條件及影響因素。引導跟蹤的實際結果證明了該模型的有效性。該方法已成功應用于S/Ka雙頻設備并為實際跟蹤捕獲提供了新的方法依據。在下一步工作中,將基于上述概率分布進一步分析其對星地鏈路性能的影響,以滿足精細化跟蹤任務分析的需求。