波浪能量采集及自供能海洋無人機電系統研究進展1)
2023-11-16 06:41:32鄒鴻翔蘇昌勝趙林川張文明魏克湘
力學學報 2023年10期
鄒鴻翔 蘇昌勝 趙林川 張文明 魏克湘,2)
* (湖南工程學院機械工程學院,湖南湘潭 411104)
? (上海交通大學機械系統與振動全國重點實驗室,上海 200240)
引言
海洋環境傳感器、航行器/機器人等無人機電系統是人類探索與開發海洋的重要工具,在海洋監測[1]、海洋作業[2]、海洋科考[3]等方面發揮著重要作用.海洋無人機電系統一般攜帶電池供能,但電池電量有限限制了無人機電系統的作業時長與范圍.盡管可以布置充電基站或供電船等為無人機電系統補充電能,但是這些設備設施一方面實施難、成本高,另一方面也限制了無人機電系統的靈活性[4].長期有效供能是制約海洋無人機電系統探索深海遠海的瓶頸難題.
波浪能是最豐富并且可以被大規模應用的可再生能源之一.波浪能的能量密度高于風能和太陽能約1~2 個數量級,而且不受晝夜變化影響[5].將波浪能轉換為電能,可以實現海洋無人機電系統的自供能傳感、控制與驅動,有望破解海洋無人機電系統供能瓶頸難題.此外,隨著化石能源面臨著枯竭和嚴重的環境問題[6-8],開發海洋能源能夠緩解能源危機、減少環境污染并促進經濟發展[9-10].
本文全面論述波浪能量采集、海洋無人機電系統和基于波浪能量采集的自供能海洋無人機電系統的研究進展,討論目前自供能海洋無人機電系統面臨的關鍵挑戰并進行展望,為解決海洋無人機電系統長期有效供能難題提供多維度參考,推動自供能傳感、控制與驅動等技術的發展與應用,助力海洋無人機電系統航向深海遠海.
1 波浪能量采集及自供能海洋無人機電系統研究進展
海洋蘊涵豐富的能源,包括太陽能、風能、波浪能和潮汐能等,與太陽能和風能相比,波浪能具有功率密度大、可持續性高且分布廣等特點[11],能為海上設備提供動力支持以及大陸電網傳輸電能[12].如表1 所示,中國擁有300 萬平方千米的海域,中國波浪能理論儲量為5.74×1011kW[13].發展波浪能技術具有廣闊的應用前景和深遠意義.
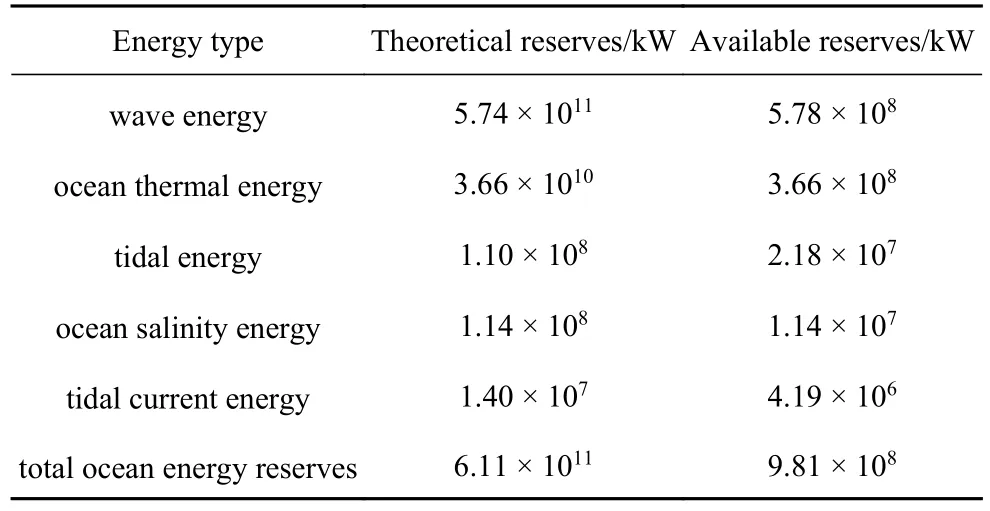
表1 中國海洋能資源儲量[13]Table 1 China's marine energy resources reserves[13]
海洋波浪能采集裝置按驅動方式一般可分為離岸越浪式、振蕩水柱式和振蕩體式等(圖1),這3 種驅動機制是將波浪能量轉化成線性或者旋轉形式的機械能,然后通過機電轉換機制轉化為電能[14-15].波浪能轉化為電能可分為3 個階段,第1 階段是將波浪能轉換為勢能,第2 階段是將勢能轉換為動能,最后階段是將動能轉化為電能[16].
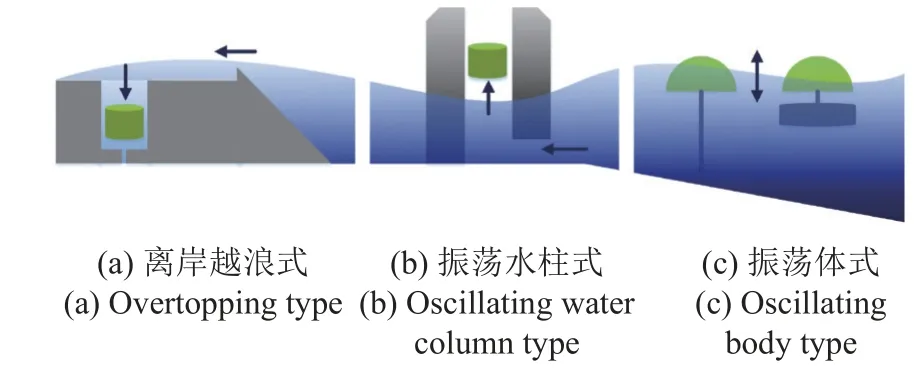
圖1 3 類波浪驅動機制Fig.1 Three types of wave driving mechanisms
機電轉換機制在波浪能量采集中具有重要作用.本節將基于機電轉換機制論述波浪能量采集方法,包括電磁波浪能量采集方法、壓電波浪能量采集方法、基于摩擦納米發電機的波浪能量采集方法和復合機電轉換機制波浪能量采集方法.
1.1 電磁波浪能量采集
電磁波浪能量采集通過波浪直接或間接驅動系統中的永磁體與線圈產生相對運動從而發電[17].慣性擺等易被低頻激勵激振的機構被用于俘獲波浪能量.扇形質量擺集成在海洋浮標中,可以有效采集低頻波浪能量,最大輸出電壓可達15.9 V,輸出功率為0.13 W[18].Li 等[19]設計了一種全方位波浪能量采集系統,通過直立式水平擺結構俘獲波浪能量,其輸出電能波形能夠反映波浪狀況,可作為自供能傳感器進行海洋波浪監測.
波浪激勵不規則、頻率低,一般需要通過機械機構將波浪激勵轉換為旋轉運動提高機電轉換效率和輸出電能品質[20].Liang 等[21]提出了一種具有機械運動整流功能的波浪能量采集器,通過齒條齒輪機構和單向軸承組合,將波浪激勵整流為單向旋轉運動.Pan 等[22]設計了一種電磁波浪能轉換器(圖2(a)),通過內螺紋套筒和外螺紋驅動軸將海浪的垂直運動轉化為旋轉運動.Chen 等[23]開發了一種混合波-流能量轉換器(圖2(b)),通過錐齒輪、單向軸承等組合將海面波浪和海下洋流能量同時轉換為電能,實驗結果表明這種混動提高了電力輸出.波浪激勵幅度大,也可以直接驅動相對簡單的線性電磁感應結構發電,但輸出功率比較低.

圖2 電磁波浪能量采集Fig.2 Electromagnetic wave energy harvesting
波浪激勵驅動機構、機械整流機構和電磁感應結構設計對電磁波浪能量采集性能具有關鍵影響.一般電磁波浪能量采集系統輸出功率較高,但體積較大,結構相對復雜和成本較高.
1.2 壓電波浪能量采集
壓電波浪能量采集利用正壓電效應將機械能轉換為電能,波浪直接或間接驅動壓電材料變形導致電偶極矩變化產生電壓[24].壓電能量采集功率密度較高,尤其設計很靈活,因此,壓電能量采集已經成為將機械能轉換為電能的主要方式之一[25-26].壓電波浪能量采集一般采用壓電懸臂梁、壓電薄膜等壓電結構.
壓電懸臂梁在激勵頻率與其固有頻率接近時才能產生較大振幅從而輸出較高功率[27-30].Chen 等[31]提出了一種壓電波浪能量采集器,由浮體、齒輪升頻機構和壓電懸臂梁陣列組成(圖3(a)).Viet 等[32]通過彈簧質量系統將波浪運動轉換為機械振動,然后通過杠桿機構放大作用于壓電材料從而發電.磁力耦合也常用于驅動壓電懸臂梁.Shi 等[33]提出了一種多向超低頻壓電振動能量采集器.波浪激勵球滾動,球滾動驅動環旋轉,環通過磁力驅動壓電懸臂梁振動發電.He 等[34]設計了一種圓柱和錐形浮體結構的壓電波浪能量采集器,浮體低頻上下運動通過磁力耦合驅動壓電懸臂梁以較高頻率振動發電.
Du 等[35]在振蕩水柱式波浪能量采集器中采用壓電膜替代傳統的空氣渦輪機(圖3(b)),壓電膜在脈動氣壓作用下變形并產生電能.Chen 等[36]開發了一種壓電波浪能量轉換器,由浮體、升頻機構和壓電膜組成(圖3(c)),通過柔性壓電膜振動發電,壓電膜諧振頻率是波浪激勵頻率的6 倍,從而可以提高壓電膜的機電轉換效率.
壓電波浪能量采集方法具有結構簡單、能量密度高和成本低等優點.然而目前壓電波浪能量采集器輸出功率仍然較低.可以通過機械調制方式將低頻波浪激勵轉換為高頻激勵,匹配壓電能量采集器從而提高輸出功率.非線性系統也可以被用于俘獲寬頻波浪能量[37].此外,壓電能量采集設計靈活,比如將壓電材料與太陽能水凝膠集成(圖3(d)),可以提高海水凈化速度[38].壓電材料將波浪能轉化為電能,重新激活水凝膠中的水,與非壓電水凝膠海水凈化器相比,活化效果提高了23%以上.
1.3 基于摩擦納米發電機的波浪能量采集
摩擦納米發電機(triboelectric nanogenerator,TENG)基于接觸起電和靜電感應將機械能轉換成電能[39-41].摩擦納米發電機在低頻工況下表現出更高的能量轉化效率,具有高功率密度、高效率、低重量和低制造成本的優點[42-43].摩擦納米發電機具有垂直接觸分離、水平滑動、單電極、獨立層等4 種工作模式[44].
雖然摩擦納米發電機相比壓電和電磁更適應低頻激勵,但是面對極低頻率波浪激勵工況,仍然需要升頻提高機電轉換效率.Jung 等[45]設計了一種倍頻圓柱形摩擦納米發電機采集低頻波浪能量(圖4(a)),在0.33 Hz 波浪頻率下,峰值功率密度為6.67 W/m3,并驗證了具備為海洋觀測系統供電的能力.Zhang等[46]研制基于摩擦納米發電機獨立層模式的光柵型波浪能量采集器,可以有效俘獲低頻波浪能量.Gao 等[47]設計了一種陀螺結構的摩擦納米發電機,用于采集低頻波浪能量.內部和外部發電單元可以在不同方向上獨立運動互不干擾發電.在6 m/s2的加速度激勵下,內部和外部發電單元的開路電壓分別為730 V 和160 V.

圖4 基于摩擦納米發電機的波浪能量采集.(a)滾筒式摩擦納米發電機波浪能量采集[45];(b)仿生蝴蝶式摩擦納米發電機波浪能量采集[48];(c)仿生蓮花式摩擦納米發電機波浪能量采集[50];(d)環面球摩擦納米發電機波浪能量采集[51]Fig.4 Wave energy harvesting based on TENG.(a)Wave energy harvesting based on cylindrical TENG[45];(b)Wave energy harvesting based on bionic butterfly TENG[48];(c)Wave energy harvesting based on bionic lotus TENG[50];(d)Wave energy harvesting based on toroidal sphere[51]
波浪激勵隨機不規則,很多學者提出了多方向波浪能量采集設計.Wang 等[48]提出了一種仿生蝴蝶翅膀摩擦納米發電機(圖4(b)),仿生葉片具有阻力放大效應,可有效俘獲多方向波浪能量.在1.25 Hz的頻率下,可以產生400 V 和2.9 μA 的電學響應.Qu 等[49]設計了一種球形偏心結構摩擦納米發電機,球殼內設置了十二面體結構,用于全向波浪能量采集,有效地將不同方向波浪能量轉換為電能,并設計了能量管理電路處理和存儲產生的電能.Wen 等[50]提出一種花狀的摩擦納米發電機(圖4(c)),由6 個花瓣摩擦納米發電機和2 個花蕊摩擦納米發電機組成,可以采集6 個自由度的動能.Liu 等[51]提出一種環面結構的摩擦電納米發電機(圖4(d)),由一個內球和一個環面殼組成,多向隨機波浪激勵驅動球在圓環殼中旋轉摩擦發電.
摩擦納米發電機具有高能量轉化效率、超高輸出電壓及豐富的材料來源等優點,且由于摩擦納米發電機主要由高分子材料制成,具備優良的抗腐蝕能力,可以在更小的空間和更簡單的結構中將各種波浪能轉換為電能.高分子材料作為摩擦納米發電機的組成部分可能會對海洋環境造成污染,采用綠色環保可降解的摩擦納米發電機材料,在設計波浪能量采集器時系統化考慮回收可以減少海洋污染.
1.4 復合機電轉換機制波浪能量采集
將多類機電轉換機制復合可以利用不同機電轉換機制的特性,增加輸出電能使用靈活性和輸出功率[52-54].摩擦納米發電機內阻高,輸出電壓高、電流小;電磁發電機內阻低,輸出電壓低、電流大.摩擦納米發電機和電磁發電機復合常用于波浪能量采集[55].Ouyang 等[56]設計了一種電磁與摩擦納米發電機波浪能量采集器(圖5(a)),永磁球在波浪激勵下運動通過電磁感應發電,并通過磁力耦合作用激勵摩擦納米發電機接觸和分離發電.Sun 等[57]提出了一種擺動平移復合發電機采集海岸線上的波浪能量(圖5(b)),波浪激勵驅動滑軌中的永磁體滑動,電磁感應發電,同時驅動多層摩擦納米發電機接觸和分離發電.Wang 等[58]提出一種拓撲結構的電磁與摩擦納米發電機波浪能量采集器,摩擦納米發電機折疊形成4 個腔室,通過獨立層模式發電.電磁發電機的永磁體嵌入靠近腔壁的折紙上,而線圈設置在腔壁上,能夠在寬頻波浪激勵下有效工作.Han 等[59]提出一種雙面絨和海爾貝克結構的復合發電機,利用絨毛增強摩擦納米發電機的性能,海爾貝克增強磁場強度.
壓電能量采集器、摩擦電納米發電機和電磁能量采集器復合使用可以提高空間利用率[60].一種基于雙擺結構的復合波浪能量采集器被提出,包括一個電磁發電機、兩個壓電發電機和兩個折紙結構摩擦納米發電機,3 類機電轉換機制合理布置提高了空間利用率[61].壓電能量采集器、摩擦電納米發電機和電磁能量采集器分別布置在系統表現出最大應變、最大接觸面積和最大位移的地方,可以充分利用它們在結構空間中的特性[62].幾類波浪能力采集器在相應激勵下的輸出功率或功率密度列與表2.

表2 波浪能量采集方法比較Table 2 Comparison of wave energy harvesting methods
1.5 自供能海洋無人機電系統探索
海域遼闊,長期有效供能是制約海洋無人機電系統探索深海遠海的瓶頸難題.海洋充電基站或供電船等為無人機電系統補充電能,但是這些設備設施一方面實施難、成本高,另一方面也限制了無人機電系統的靈活性.海洋蘊涵豐富的能源,包括太陽能、風能、波浪能和潮汐能等.太陽能發電技術雖然已經商業化,發展較為成熟,但太陽能發電技術受地區、晝夜影響較大,同時,太陽能電池板通常需要較大的安裝面積,這將在一定程度上增加海洋無人機電系統的體積,不利于小型化.與太陽能和風能等相比,波浪能具有功率密度大、可持續性高和分布廣等特點.將波浪能轉換為電能,可以實現海洋無人機電系統的自供能傳感、控制與驅動,有望破解海洋無人機電系統供能瓶頸難題.為海洋無人機電系統供能的波浪能量采集器既需要滿足功耗要求也要降低對海洋無人機電系統工作的影響,需要兼顧構型和輸出功率.
1.5.1 自供能傳感器
海洋浮標傳感器電源不足可能導致其監測海洋數據在時間上不連續,不能全面實時反映海洋狀況[63].浮標所處的海洋環境具有風能、太陽能和波浪能等.波浪能量高度集中在海面以及接近海面的水層,而海洋浮標分布的位置正好位于此范圍內,波浪能更自然地進入海洋浮標.海洋浮標可以高效地采集波浪能量并應用其能源為傳感器供能[64-65].
Wang 等[66]提出了一種可集成于浮標內部的可堆疊摩擦納米發電機,波浪激勵浮標在水平面上擺動從而推動PTFE 小球滾動發電,能為溫度傳感器、PH 傳感器、鹽度傳感器等海洋環境監測傳感器供電.Wang 等[67]還提出一種內置于海洋浮標的波浪能量采集器,實驗數據表明,波浪能量采集器能產生1.4 W 的平均功率,為大多數小功耗傳感器供能.Liang 等[68]設計了基于摩擦納米發電機用于水位報警的自供能浮標.摩擦納米發電機發電單元使用電荷激發模塊,從而大大增強了球形摩擦納米發電機的輸出性能,輸出電流和輸出功率可達到15.09 mA 和24.48 mW,成功實現了自供能水位報警功能.
Xie 等[69]設計了一種振蕩浮標波浪能量采集器,圓柱形浮標倒立安裝俘獲波浪能,浮標上下運動驅動電磁發電機單向旋轉發電,產生的電能存儲在超級電容中,為跨海大橋健康狀態監測傳感器供電.Zhao 等[53]提出一種機械智能電磁-摩擦復合波浪能量采集器,如圖6 所示,實驗結果表明,該能量采集器能夠在超低頻下有效工作,可以在6 min 內將0.47 F 電容器充電至5 V,從而實現自供能PH 值、光照度和溫度等環境監測及無線信息傳輸.

圖6 自供能海洋環境傳感器[53]Fig.6 Self powered marine environmental sensors[53]
1.5.2 自供能航行器/機器人
波浪滑翔機由水面上的浮子和水面下的滑翔機組成.水面浮子在波浪激勵下通過系繩拉扯水下滑翔機,同時水下滑翔機上可翻轉機翼發生翻轉,產生一直向前的驅動力.Tian 等[70]提出了一種混合滑翔機,混合滑翔機由波浪能和太陽能供能,可根據不同需求在海洋表面或垂直剖面上滑行.
波浪能量采集器可以安裝在水下航行器/機器人的內部或者外部.安裝在外部的波浪能量采集器能獲得較大波浪激勵,但波浪沖擊較大以及導致外部阻力增加.安裝在內部的波浪能量采集器具有更高的可靠性和穩定性.Townsend 等[71]提出了一種用于水下機器人的波浪能量采集系統,波浪激勵框架飛輪陀螺響應實現從波浪能到電能的轉換.水下測試表明,在波浪高度為0.1 m 的情況下,該系統的最大瞬時發電功率為3.58 W.
自供能水下航行器/機器人可通過切換工作模式(俘能模式和運動模式)提高系統效能.Li 等[72]設計了集成波浪能量采集系統的自主水下航行器(圖7(a)),通過垂直收放的浮子實現俘能模式與運動模式的切換,浮子通過纜繩與自主水下機器人主體相連接,當波浪激勵浮子上下運動時,浮子帶動纜繩驅動自主水下機器人內置的發電機發電.實驗表明,水下航行器的電池充滿電所需時間為2.65 d,充滿電的水下航行器可以航行20 km.Chen 等[73]設計了一種裝備在海洋機器人的可折疊翼波浪能量采集系統(圖7(b)),可在俘能模式與機器人模式之間切換,可折疊翼波浪能量采集系統的最大俘能功率到達2.6 W,能滿足很多低功耗應用需求.
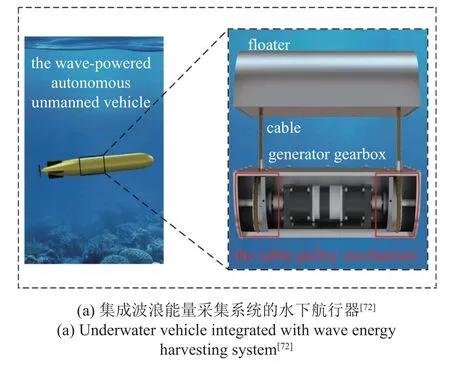
圖7 自供能航行器/機器人Fig.7 Self-powered vehicles
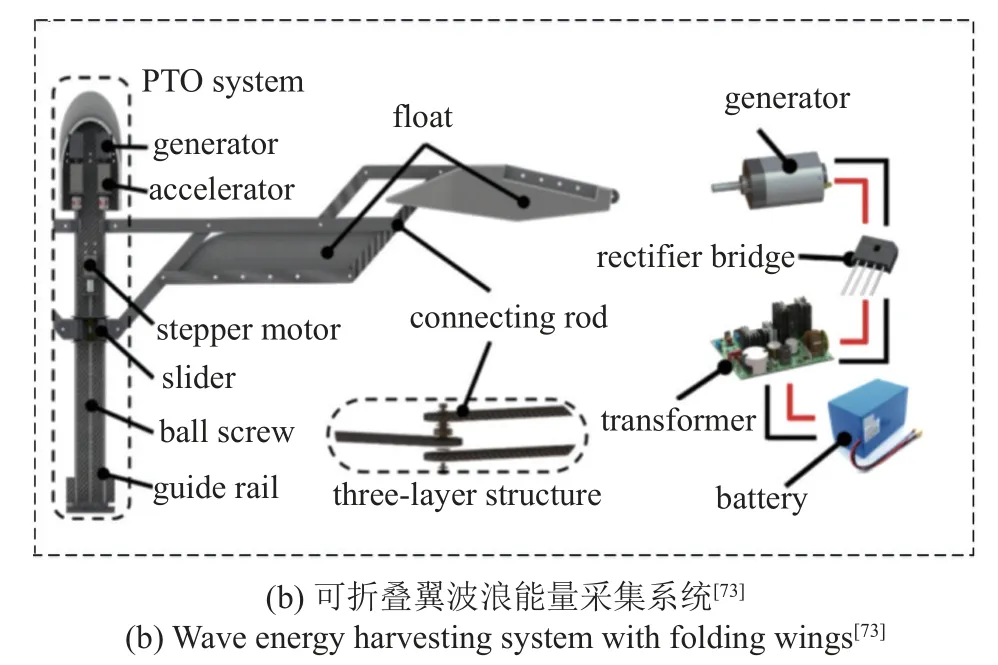
圖7 自供能航行器/機器人(續)Fig.7 Self-powered vehicles (continued)
2 海洋無人機電系統研究進展
海洋環境傳感器、航行器/機器人等無人機電系統可用于海洋軍事偵察與測繪、海洋環境資源生態探測和監測、海洋作業設備設施狀態監測等,有益于海洋生態保護、海洋經濟發展和海洋權益維護[74-75].如圖8 所示,海洋環境機電系統根據能否自主運動可分為傳感器和航行器/機器人.航行器/機器人按照作業區域可以分為水面航行器和水下機器人.水下機器人按控制方式可分為有纜水下機器人和自主水下機器人.此外,仿生軟體機器人具有很好的環境友好性、生物交互性和低成本優勢,也引起了廣泛關注[76].
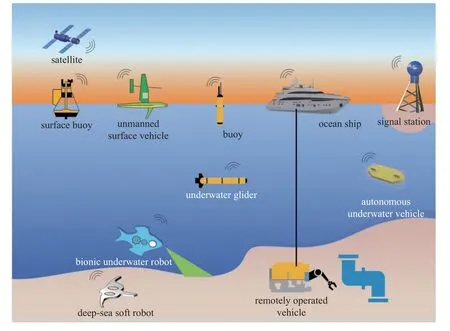
圖8 海洋環境無人機電系統Fig.8 Unmanned electromechanical systems in marine environments
2.1 海洋環境傳感器
海洋是地球氣候調節、碳循環不可或缺的部分,海洋監測對預測大氣變化、可持續利用海洋資源具有重要作用[77].海洋傳感器可以與船舶、浮標、水下設備和海上平臺集成,收集信息以服務防災[78]、海洋科考[79]、船舶設計及導航[80]、海洋監測[81]等.
浮標是指浮在海面上的標志物,傳統上用于警示危險、指引航道.現代浮標與雷達、船舶、衛星和陸基監測節點可組成全覆蓋的海洋信息觀測系統[82].國際生物地球化學Argo 項目組目前正在建立一個全球多學科海洋觀測網絡,該網絡由自動Argo浮標組成,配備了廣泛的生物地球化學傳感器,將提供改進海洋條件和生態系統健康的模型和預測所需的海洋環境信息[83].
光纖傳感器具有抗電磁干擾、耐極端溫度和壓力、重量輕、傳輸速率高、體積小和靈活等優點,在海洋環境和海洋結構健康監測領域受到廣泛關注.Shen 等[84]研制一種船載光子計數激光雷達,利用光子計數技術實現了高精度后向散射信號測量,具有觀測深層海水光學特性的潛力.Wang 等[85]采用全光纖海水溫度和深度傳感陣列來獲取海水溫度和深度剖面.通過對光纖光柵傳感器封裝結構的研究,解決了傳統光纖光柵傳感器在測量海水溫度時存在的測量誤差問題.
水下軟傳感器是適用于水下小型機器人傳感任務的理想選擇.與剛性傳感器相比,它具備更高的靈活性和可靠性,并能自主完成自組裝和自驅動的功能.由于其低能耗的特性,軟傳感器在水下環境中表現出了更為出色的性能,具有廣闊的應用前景[86].
電池電量有限阻礙了海洋環境傳感器大規模部署.隨著微/小型電子產品能耗降低,使得海洋能量采集技術可以滿足海洋傳感器等低功耗用電設備的需求,擺脫電池電量和線纜的限制.
2.2 無人水面航行器
無人水面航行器(unmanned surface vehicle,USV)是無需或者少量人力干預的水面航行器,能靈活布置在海洋不同區域,具有可靠、快速和機動性強的特點,可以執行監測海洋參數、排查魚雷和海岸巡邏等各種任務[87-88],極大地降低了人類風險并提高了效率.Carlson 等[89]提出經濟且便于攜帶的自主水面航行器(圖9(a)),在危險環境中可以測量水深和海流.Wang 等[90]設計了一支自主無人水面航行器艦隊(圖9(b)),每一個無人水面航行器具有規則形狀利于相互連接,并設計一種十字型推進器進行推進,此設計可構成海洋表面移動平臺.近年來,隨著應用環境愈加復雜,人工智能、大數據技術的迅速發展,無人水面航行器的智能化水平不斷提高[91-92].比如,Wang 等[93]提出了統一框架有機結合了路徑規劃和導航系統,可以實現無人水面航行器在受限航道/水域中沿著最佳安全路徑自主駕駛.Meyer 等[94]探討了近端策略優化的潛力,使無人水面航行器能夠實現遵循已知期望路徑的同時避免與沿途其他船舶發生碰撞.
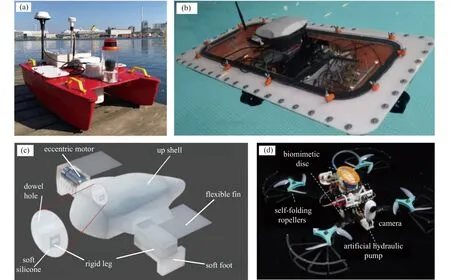
圖9 無人水面航行器.(a)小型自主水面航行器[89];(b)自主水面航行器艦隊單元[90];(c)振動驅動兩棲機器人[95];(d)仿?魚兩棲機器人[96]Fig.9 Unmanned surface vehicles.(a)Small autonomous surface vehicle[89];(b)Fleet unit of autonomous surface vehicle[90];(c)Vibration driven amphibious robot[95];(d)A remora-like amphibious robot[96]
在空中、海面和海下等多工況作業的跨介質航行器/機器人可以進一步提高航行器/機器人的機動性.Wang 等[95]開發了一種小型兩棲機器人(圖9(c)),通過振動驅動的運動機制實現兩棲運動,避免了傳統兩棲機器人結構復雜問題.Li 等[96]設計了一種跨越空中水下的仿生?魚機器人(圖9(d)).仿生?魚機器人具有被動變形的螺旋槳,能夠實現在0.35 s內快速穿越水空邊界.
2.3 有纜水下機器人
有纜水下機器人,也可稱之為遙控水下機器人(remotely operated vehicle,ROV)是通過纜線與海上操作平臺連接的水下機器人.有纜連接使得水下機器人獲得源源不斷的能源,使其能裝備較大的、需要較高功率的操作設備,從而功能更強大,比如采集生物樣本、開采海底礦產和繪制海底三維模型等[97].但海上操作平臺也面臨能源補給困難、供能不足的問題,波浪能量采集器可以為海洋操作平臺供能,提高其續航能力,減少維護成本.Chaloux 等[98]開發一種魚類采樣有纜水下機器人(圖10(a)),通過推進器的強大吸力捕獲魚類.切割有纜水下機器人被研制用于開采位于海底火山附近的塊狀硫化物(圖10(b)),切割有纜水下機器人由位于船舶上的作業員遠程控制4 m 寬刀片切割目標物[99].有纜水下機器人等能夠檢查和維護從深海延伸出來的天然氣或石油管道(圖10(c)),并追蹤石油礦場的石油泄漏、海底天然氣管道的氣體泄漏,保護水下生態系統[100].
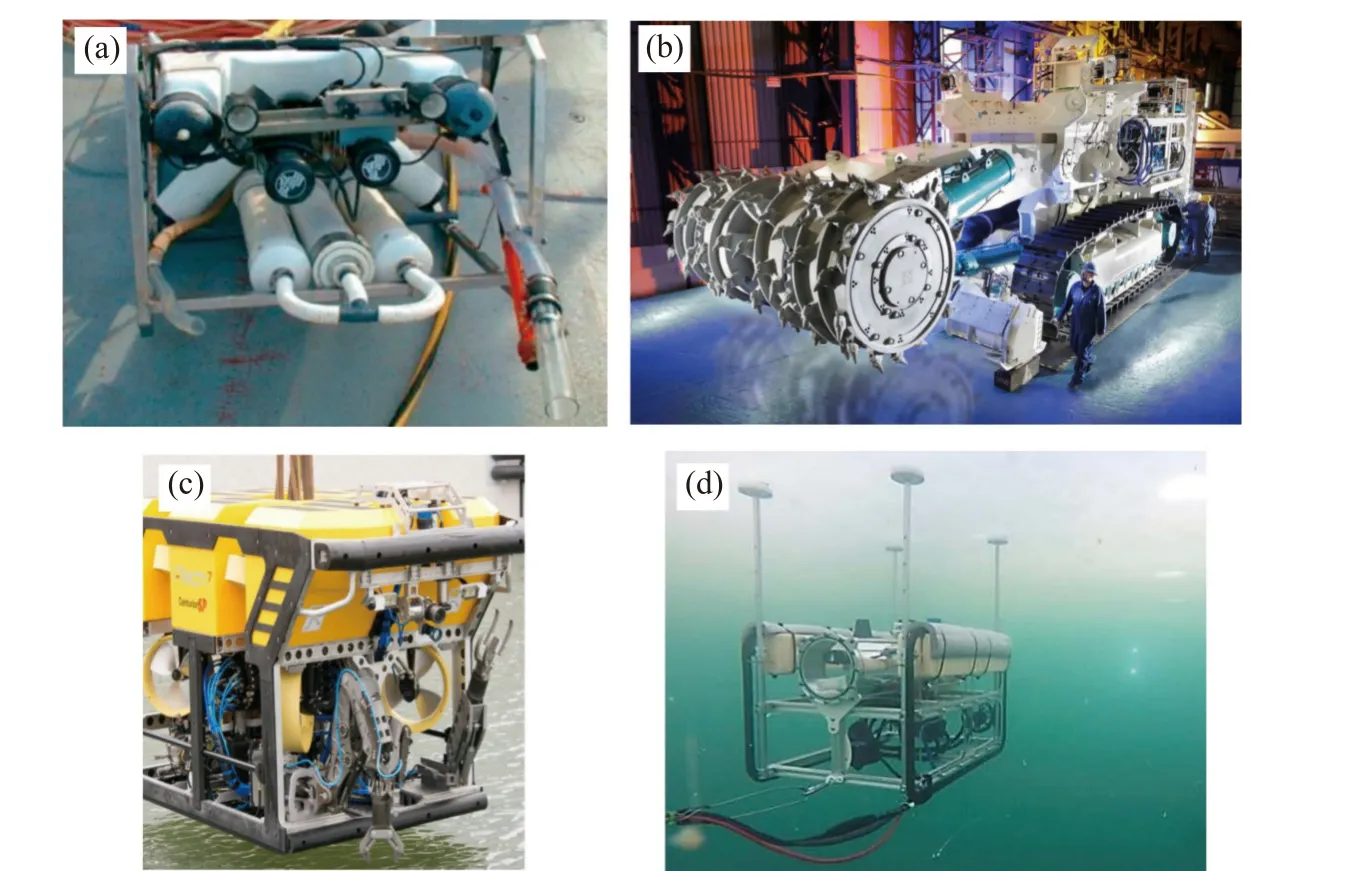
圖10 有纜水下機器人.(a)用于魚樣采集有纜水下機器人[98];(b)切割型有纜水下機器人[99];(c)探測有纜水下機器人[100];(d)具有光學定位系統的有纜水下機器人[104]Fig.10 Remotely operated vehicles.(a)Remotely operated vehicle for fish sampling[98];(b)Cut-out remotely operated vehicle[99];(c)Remotely operated vehicle for detection[100];(d)Remotely operated vehicle with optical positioning system[104]
線纜與水下障礙物碰撞、線纜慣性等會影響水下機器人的可操作性[101].保持線纜拉力使之保持直線狀態可以避免纏繞[102].Rahimuddin 等[103]在有纜水下機器人頂部設置浮力結構,在底部加重,浮心在重心的正上方且浮心與重心的距離較遠保證了水下機器人良好的穩定性.Lund-Hansen 等[104]設計了具有光學定位系統的便攜式有纜水下機器人(圖10(d)),用于測量和采樣.Xu 等[105]提出了用于有纜水下機器人的定點吸附器,提高了有纜水下機器人操作效率.Gladkova 等[106]使用里程計平均數據推算路徑實現了有纜水下機器人的高精度定位.
2.4 自主水下機器人
自主水下機器人(autonomous underwater vehicle,AUV)是集先進制造技術、智能材料、水下無線通訊和高計算能力計算機等技術為一體的自主導航和決策的水下機器人[107-108].自主水下機器人擺脫了線纜限制,能探索更深更遠,但需要自帶能源裝備或者增加自供能設備來支撐其航行.自主決策的功能使水下自主機器人能適應復雜的水下環境,提升穩定性和可靠性[109].
Fernandez 等[110]設計了一種自主水下機器人(圖11(a)),可以檢查和探測淹沒的礦井隧道網絡.德國智能人工智能中心[111]研制了名為“DAGON”的自主水下機器人(圖11(b)),DAGON 是雙體船式,包括兩個高清攝像頭和5 個推進器,主要用于創建視覺地圖和即時定位.Iscar 等[112]開發了開源、低成本的自主水下機器人用于深海的光學探測與繪制海洋地圖.
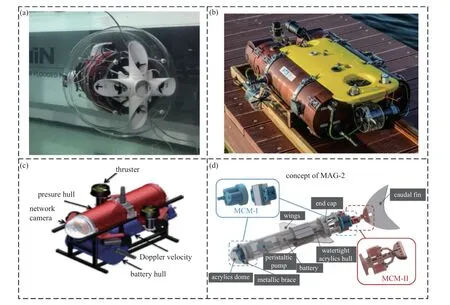
圖11 自主水下機器人.(a)礦井隧道探測自主水下機器人[110];(b)DAGON[111];(c)DaryaBird[115];(d)基于線性肌肉調節的自主水下機器人[117]Fig.11 Autonomous underwater vehicles.(a)Autonomous underwater vehicle for mine tunnel detection[110];(b)DAGON[111];(c)DaryaBird[115];(d)Autonomous underwater vehicle based on linear muscle regulation[117]
自主水下機器人的推進器方面進展迅速,具有更強的推進力、機動性以及狹小空間作業能力.Gu 等[113]提出了一種球形自主水下機器人,其具有矢量水射流和螺旋槳推進器的混合推進裝置,混合推力器的最大推力比單推進器增加了2.27 倍.Wang 等[114]提出了一種盤狀自主水下機器人,其由4 個螺旋槳和浮力調節系統組成的推進系統能實現高機動性.
水下機器人可以通過變換工作模式和狀態來提高工作效率和增強續航能力.Hidaka 等[115]設計了一款名為“DaryaBird”的水下機器人(圖11(c)),實現了模塊化易于實現多種探測功能,且能在線纜連接的情況下工作.中國科學院沈陽自動化研究所開發了一類遠程自主水下機器人“Explorer 1000 AUV”,其有兩個高精度可變浮力系統,因此它可以執行兩種工作模式: 自主水下機器人在一定固定位置進行往復剖面觀測的定點觀測模式,以及自主水下機器人在多個觀測點巡航并在每個點進行定點觀測的巡航觀測模式[116].Wang 等[117]提出一種用于自主水下機器人的線性軟波紋腔肌肉致動器(圖11(d)),其可驅動浮力調節機構和尾部的轉向機構,降低結構的復雜性,增大內部可利用空間.
自主水下機器人主要用來執行探測任務,傳感器以及探測技術顯得尤為重要.為了節省設計中的優化時間,從生物中獲取靈感來解決工程問題是較好的設計方法.
2.5 仿生軟體機器人
仿生軟體機器人具有很好的環境友好性、生物交互性和低成本優勢,在海洋環境具有廣泛的應用前景[118-119].
仿生機器魚可以通過身體和尾鰭實現游動(圖12(a))[120-121].Zhang 等[122]提出兩段尾鰭推進方法,與現有單一尾鰭設計相比,兩段尾鰭推進在穩定性和可控范圍方面具有優異性能.Li 等[123]提出了一種多尾全方位水下機器人,結合了魚類、青蛙、章魚、魚群等不同運動模式.Christianson 等[124]提出了一種鰭狀介質彈性體致動器的設計,具有驅動應變大、響應速度快、噪音低和效率高等特點.Shintake 等[125]設計了一種基于介電彈性體驅動器的仿生軟體機器魚,通過身體和尾鰭推進游動.Li等[126]受深海獅子魚啟發,開發了一種深海軟體機器人(圖12(b)),將電子設備封裝在硅膠基質中,減小深海高壓的影響,使用重量輕的介電彈性體作為致動器,證明了軟材料在極致壓力下正常工作的巨大潛力.
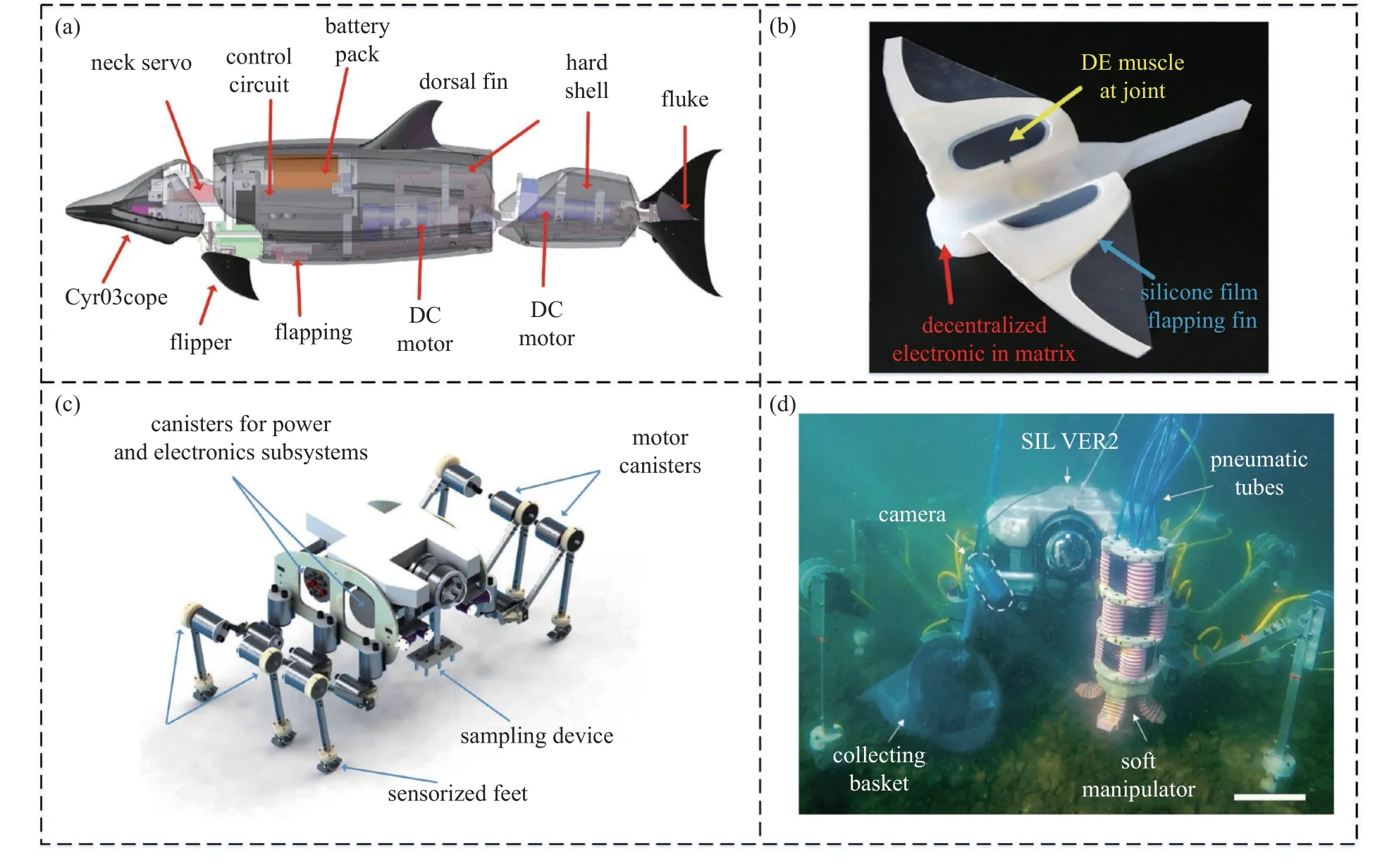
圖12 仿生軟體機器人.(a)仿生機器魚[121];(b)深海軟體機器人[126];(c)仿生水下多足機器人[130];(d)軟體機械手[131]Fig.12 Biomimetic soft robot.(a)Bionic robotic fish[121];(b)Deep sea soft robot[126];(c)Bionic underwater multi-legged robot[130];(d)Soft manipulator[131]
此外,也有一些其他方式被用于軟體機器人驅動.Armanini 等[127]受鞭毛生物啟發設計了水下推進器,通過簡單旋轉驅動產生推進力.Zhang 等[128]采用柔性磁性復合材料制作驅動器,通過磁場驅動,實現軟體機器人的游動和抓取等功能.Ren 等[129]提出了一種仿水母軟體機器人,通過變化磁場驅動磁性復合彈性體在機體周圍產生受控流體,實現操作和運輸等功能.
為了提高仿生軟體機器人的作業能力,Picardi等[130]受到底棲爬行動物啟發提出了一種仿生水下多足機器人(圖12(c)),可以在0.5~12 m 深度范圍內穿越不規則地形精確接近目標并實施干預.Liu等[131]介紹了一種協同機器人系統(圖12(d)),通過設置底棲腿機器人作為移動基座,顯著擴展軟機械手的工作空間,在不破壞海底環境的情況下精確接近和采集目標物.Stuart 等[132]設計了一種溫和抓取水下物體的柔順指尖吸力抓取器,溫和吸入流提供了一種改變接觸條件的方法.折紙機構具有易設計、可靈活重構的特點.折紙機構與不同的致動器集成能實現變構型以及運動傳感等功能,模塊化軟折紙能為多功能、智能軟機器人設計提供有效的解決方案[133].
3 關鍵挑戰與展望
波浪能量采集技術的發展對提高海洋環境傳感器、航行器/機器人等無人機電系統作業時長與范圍具有重要意義,也有很多報道驗證了基于波浪能量采集的自供能海洋無人機電系統的可行性.然而,目前仍然面臨著許多的不足,關鍵挑戰如下.
(1)現階段大部分小型波浪能量采集器的輸出功率還較低,僅能為微/小型傳感器等供電,還不能滿足遠距離信息傳輸、圖像視頻采集、水下機器人、多功能集成系統等方面應用的功耗需求.
(2)大部分波浪能量采集研究還只處于實驗室階段,環境適應性、系統可靠性等方面的考慮較少,強浪沖擊、海洋環境惡劣等嚴重影響波浪能量采集器可靠性的關鍵難題還未得到很好解決.
(3)波浪能量采集器與電池相比能量密度較低,無人機電系統需要較大空間配置波浪能量采集器.但是,較大尺寸的能量采集器會導致更大運動阻力,影響航行器/機器人的運動靈活性.
針對以上關鍵挑戰,提出如下展望.
(1)整流調控可以將低頻不規則波浪激勵轉換為可控的力、運動或其他能量形式,整流調控使得系統容納更加復雜的激勵輸入;整流調控使得直接作用于換能器的激勵更加匹配,不僅可以大幅提高機電轉換效率,也可以提高系統的穩定性和可靠性.但整流調控也增加了系統的復雜性、體積和成本.簡單高效整流調控設計方法有待進一步研究.
(2)波浪能、風能和太陽能等多源能量采集是提高輸出功率密度和輸出電能時空互補的有效方法.多源能量采集協同增強、混合電力電路處理和電能存儲、多源能量互補轉換與利用等需要全面系統的研究.
(3)波浪能量采集系統如果與航行器/機器人集成需要具有行動靈活性,因此驅動方式只能選擇漂浮振蕩體式.目前國內外關于漂浮振蕩體式波浪能量采集的研究主要側重于功能材料、發電模式和結構設計等方面,動力學與控制有待深入研究.自供能航行器最核心的問題是能量采集如何滿足系統能耗需求,既需要提高波浪能采集輸出功率,也需要降低系統能耗.變構型使得俘能模式和運動模式各自具有適合結構和形狀可以提高系統效能,但如何不依賴或少依賴電學元器件實現簡單、可靠、低能耗構型調控有待探索.
4 總結
本文系統總結了波浪能量采集研究進展,介紹了海洋無人機電系統,論述了自供能海洋無人機電系統的研究現狀、關鍵挑戰與發展方向.隨著人類探索海洋世界的興趣越來越強,需要具有超長續航能力的航行器/機器人開展深海遠海探索和作業.長期有效供能是制約海洋無人機電系統作業時長與范圍的瓶頸難題.波浪能量采集技術的發展對提高海洋環境傳感器、航行器/機器人等無人機電系統續航能力具有重要意義,但目前波浪能量采集技術還不能滿足海洋航行器/機器人的供能需求以及適應復雜惡劣海洋環境,波浪能量采集系統與航行器/機器人的集成設計方法也有待深入研究.本文針對自供能海洋無人機電系統開發面臨的關鍵挑戰提出了展望,為波浪能量采集研究及自供能航行器/機器人設計提供參考.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
故事作文·高年級(2021年12期)2021-12-21 02:32:35
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30