基于圖卷積和注意力機(jī)制的高速公路交通流預(yù)測
2023-11-15 06:39:36馮鳳江楊增刊
公路交通科技 2023年9期
馮鳳江,楊增刊
(1. 河北上元智能科技股份有限公司,河北 石家莊 050000;2. 河北慶恒科技發(fā)展有限公司,河北 石家莊 050000)
0 引言
高速公路管理控制的基礎(chǔ)之一是短時(shí)交通流預(yù)測[1-2],近年來大數(shù)據(jù)挖掘驅(qū)動(dòng)方法研究已成為其主要方向[3-7]。高速公路不同于城市道路,其管控實(shí)施效果存在滯后性,如相鄰上下游匝道間距離較遠(yuǎn),若下游較遠(yuǎn)路段出現(xiàn)擁堵,則匝道調(diào)節(jié)效果需較長時(shí)間才能發(fā)揮作用,使高速公路控制措施必須適度提前,多步預(yù)測成為高速公路控制工程應(yīng)用的必要條件。理論研究方面,早期高速公路交通流預(yù)測集中于使用自回歸滑動(dòng)平均、卡爾曼濾波等統(tǒng)計(jì)模型方法,而后預(yù)測集中于使用人工神經(jīng)網(wǎng)絡(luò)、支持向量機(jī)、非參數(shù)回歸等淺和深層神經(jīng)網(wǎng)絡(luò)的機(jī)器學(xué)習(xí)方法[1-2,8-11]。這些方法雖有各自特點(diǎn)和優(yōu)勢,但在多步預(yù)測時(shí)偏差較大,難以滿足工程需要,且大部分方法使用時(shí)僅利用預(yù)測斷面或路段數(shù)據(jù),沒有利用可能影響預(yù)測路段流量的其他路段數(shù)據(jù),尤其是高速公路上游和可能反向傳播的下游數(shù)據(jù),無法體現(xiàn)交通流的空間分布特點(diǎn)。
編解碼序列對序列(Sequence to Sequence,Seq2Seq)結(jié)構(gòu)由于能夠提供一個(gè)輸入輸出序列可不等長的框架,近年來被廣泛應(yīng)用于機(jī)器翻譯領(lǐng)域,是研究深度學(xué)習(xí)的主要方法之一[5,12-13],特別在多步預(yù)測方面可取得較高精度。其中注意力機(jī)制加入編碼層后[12],給每一個(gè)輸入數(shù)據(jù)分配權(quán)重,使解碼時(shí)能選擇與預(yù)測目標(biāo)值權(quán)重更大的元素從而提高預(yù)測精度[12]。在基于注意力機(jī)制的Seq2Seq多步預(yù)測模型中,輸入序列的選擇和特征提取是預(yù)測結(jié)果是否達(dá)到高精度的關(guān)鍵,例如通過正反向?qū)W習(xí)時(shí)間依賴關(guān)系,避免信息丟失的雙向長短期記憶(Bi-directional Long Short Term Memory,Bi-LSTM)網(wǎng)絡(luò)模型[6],將輸入門和遺忘門合為一體只保留更新門和重置門的雙向門控循環(huán)單元(Bi-Gated Recurrent Unit,Bi-GRU)模型[12-15],通過其雙向門處理得到有效信息,克服傳統(tǒng)機(jī)器學(xué)習(xí)在處理長期依賴問題時(shí)存在的梯度消失和爆炸問題,提升運(yùn)算精準(zhǔn)性,并由于比其他方法所需神經(jīng)單元數(shù)量少,效率更高,穩(wěn)定性更好,更容易進(jìn)行訓(xùn)練,成為了深度學(xué)習(xí)多步預(yù)測特征提取中的最新方法,被應(yīng)用于城市軌道交通、道路交通流速度的多步預(yù)測中[3,12-14]。但這些研究對象不涉及高速公路斷面交通流參數(shù)預(yù)測,高速公路空間分布和預(yù)測模型融合尚需深入研究。
將交通流空間分布特點(diǎn)參數(shù)和可能影響預(yù)測點(diǎn)的其他路段時(shí)間分布參數(shù)(時(shí)間序列)融入到預(yù)測模型中是近年來交通流預(yù)測的一個(gè)新趨勢,如陳喜群等[16]提出一種基于圖卷積網(wǎng)絡(luò)(Graph Convolution Network,GCN)的城市路網(wǎng)短時(shí)交通流預(yù)測模型;Zhang等[3]提出一種注意力圖卷積(Attention Graph Convolution,AGC)Seq2Seq深度學(xué)習(xí)模型來獲取交通流空間和時(shí)間相關(guān)性,提升多步預(yù)測的精準(zhǔn)度。這些研究較少涉及雙向注意力機(jī)制,研究對象也不面向高速公路。基于此,本研究提出一種考慮時(shí)空分布的高速公路交通流多步深度學(xué)習(xí)預(yù)測方法,結(jié)合路網(wǎng)結(jié)構(gòu)提取預(yù)測路段和“可能影響上下游的其他路段”的空間特征,將融合后歷史和實(shí)時(shí)時(shí)間序列數(shù)據(jù)作為輸入,建立圖卷積神經(jīng)網(wǎng)絡(luò)和注意力機(jī)制融合的高速公路交通流多步預(yù)測模型Bi-GRU-Seq2Seq,通過試驗(yàn)予以分析驗(yàn)證。
1 預(yù)測系統(tǒng)結(jié)構(gòu)
高速公路交通流預(yù)測系統(tǒng)依托道路拓?fù)浣Y(jié)構(gòu),由信息采集子系統(tǒng)、數(shù)據(jù)庫、知識庫、預(yù)測模塊等組成,系統(tǒng)結(jié)構(gòu)如圖1所示。其中:(1)高速公路網(wǎng)絡(luò)表示為G(V,E,A),V為節(jié)點(diǎn)集,取檢測器所在的主線門架、出入口匝道門架、立交橋門架等位置;E為邊集,e為每一條邊點(diǎn)間的路段(基本單元);A∈RN×N為G的鄰接矩陣,aij為其元素,其值為1時(shí)表示路段ei和ej連接,為0則表示不連接。(2)預(yù)測對象為網(wǎng)絡(luò)中每一個(gè)路段(邊)或節(jié)點(diǎn)在未來時(shí)間段的交通流參數(shù)估計(jì)值,如主線斷(截)面流量、路段流量或密度、速度等。

圖1 預(yù)測系統(tǒng)結(jié)構(gòu)Fig.1 Structure of prediction system
1.1 預(yù)測系統(tǒng)原理
預(yù)測系統(tǒng)基本原理為:
(1)由信息采集子系統(tǒng)采集的實(shí)時(shí)交通流信息存儲在數(shù)據(jù)庫中,并計(jì)算處理供系統(tǒng)使用。


(4)采用注意力機(jī)制獲取各特征值的權(quán)重,將提取的包含空間特征的時(shí)間序列數(shù)據(jù)加權(quán)融合后帶入GRU模型,得到路段交通流多步預(yù)測值。
(5)將預(yù)測值和隨后采集到的交通流實(shí)時(shí)值存入知識庫中,更新預(yù)測模型中相關(guān)參數(shù)值。
1.2 預(yù)測路段(斷面)空間數(shù)據(jù)選取
斷面i交通流參數(shù)影響其未來l個(gè)時(shí)段預(yù)測值Xi,t+l=(xi,t+1,xi,t+2,…,xi,t+l)T∈Rl的空間數(shù)據(jù)為:
(1)上游路段。考慮到高速公路各路段(基本單元)較長,對于短時(shí)交通流預(yù)測,只有“車輛以最大速度抵達(dá)被預(yù)測路段的”上游路段的交通流參數(shù)對預(yù)測產(chǎn)生影響,本研究對受到影響的上游路段數(shù)u1定義為:
vmax,i-1,i-2+li-1,i/vmax,i-1,i)>=T·k],
(1)

(2)下游路段。下游出現(xiàn)擁堵時(shí)主線出現(xiàn)反向傳播情景,從而影響預(yù)測截面i的交通流參數(shù),對于預(yù)測第k步參數(shù)xi,t+k,可能影響預(yù)測斷面的下游路段數(shù)u2定義為:
li+u2-1,i+u2/wmax,i+u2-1,i+u2)>=T·k],
(2)

1.3 預(yù)測路段時(shí)間數(shù)據(jù)選取
預(yù)測路段時(shí)間數(shù)據(jù)分為時(shí)間臨近性特征參數(shù)(實(shí)時(shí)數(shù)據(jù))和周期性特征參數(shù)(歷史數(shù)據(jù))兩部分:

2 基于注意力機(jī)制交通流的Seq2Seq預(yù)測模型
2.1 特征提取
(1)空間特征提取。采用GCN方法進(jìn)行空間特征提取[4,17-18],利用K階鄰域矩陣對第1節(jié)中所述高速公路網(wǎng)絡(luò)中的每個(gè)截面流量數(shù)據(jù)的時(shí)空進(jìn)行融合。對于截面i可能受到的上下游空間影響路段數(shù)u1和u2,定義其K階路段集合為λi(K){j∈[i-u1,i+u2]}。為模仿拉普拉斯矩陣,對于鄰接矩陣A添加單位矩陣I,其K階鄰域矩陣可通過計(jì)算A+I的K次冪得到:
(3)

(4)
對可能影響本路段的上下游時(shí)間序列進(jìn)行圖卷積操作,通過下式完成全部截面信息更新:
(5)

式(5)中截面i的更新過程見式(6):
[xi,t-n+1,…,xi,t],
(6)


(7)
(8)
(9)
(10)
式中,GRU(·)為非線性映射函數(shù),為t-1時(shí)段正反向隱藏層狀態(tài);Vt,V′t,bt分別為t時(shí)段網(wǎng)絡(luò)自學(xué)習(xí)的正反隱狀態(tài)權(quán)重和偏置。式(8)~(10)分別表示臨近、日周期、周周期的時(shí)序特征,將以上Bi-GRU的輸出進(jìn)行加權(quán)融合,得到綜合時(shí)間序列特征:
Hf=WhHh+WrHr+WzHz+bf,
(11)
式中,Hf為融合后影響因素狀態(tài)集合;Wh,Wr,Wz,bf分別為各自特征的權(quán)重及偏置;Hh,Hr,Hz分別為臨近、日周期、周周期時(shí)序特征中不同時(shí)間段隱層狀態(tài)的集合。
2.2 預(yù)測模型輸入(特征向量)計(jì)算

(12)
(13)
(14)
2.3 預(yù)測值計(jì)算
將解碼器上一時(shí)段預(yù)測值xi,t+l-1、隱藏狀態(tài)si,t+l-1和當(dāng)前時(shí)段的注意力向量ci,t+l作為GRU模型的輸入來更新當(dāng)前時(shí)段交通流隱藏狀態(tài),經(jīng)過vy線性變換得到當(dāng)前交通流參數(shù)預(yù)測值:
si,t+l=f1(si,t+l-1,xi,t+l-1,ci,t+l),
(15)
(16)
式中,f1為解碼器GRU模型的非線性映射函數(shù);by為模型自學(xué)習(xí)的偏置。
2.4 模型參數(shù)動(dòng)態(tài)更新
對于第l步的預(yù)測值x′i,t+l,使用均方根誤差(RMSE)最小化為預(yù)測模型參數(shù)確定和動(dòng)態(tài)實(shí)時(shí)更新的依據(jù),具體采用Adam優(yōu)化器梯度下降法進(jìn)行迭代訓(xùn)練:
(17)
第t步預(yù)測模型參數(shù)θt更新步驟為:
(1)計(jì)算第t步梯度gt。
(2)計(jì)算gt指數(shù)移動(dòng)平均mt和糾偏值m1t,其中為β1梯度指數(shù)遺忘因子或衰減率:
mt=β1mt-1+(1-β1)gt,
(18)
(19)
(3)計(jì)算gt平方的指數(shù)移動(dòng)平均vpt和糾偏值vp1t,其中β2為梯度平方的指數(shù)衰減率:
(20)
(21)
(4)更新參數(shù):
(22)
式中,α為學(xué)習(xí)率;ε為避免除數(shù)變?yōu)?的設(shè)置數(shù)。
3 應(yīng)用分析
3.1 試驗(yàn)背景
以京港澳高速涿州—保定北為試驗(yàn)對象,該段含6對出入口匝道和2個(gè)與其他高速互通的立交橋,主線單向4車道,長度為76.4 km,大車限速值為100 km/h,小車限速值為120 km/h,反向傳播速度為25 km/h。依據(jù)設(shè)置在門架上的視頻檢測器、各匝道出入口和互通式立交橋進(jìn)行基本單元(路段)劃分,如表1所示。數(shù)據(jù)由高速公司通過視頻軟件處理提供,2020年10月至12月間,前49 d為訓(xùn)練集,后14 d為測試集。斷面交通上下游影響分別按車輛最大限速和反向傳播速度計(jì)算確定,如徐水?dāng)嗝骖A(yù)測粒度為20 min 時(shí),上游對其影響最大長度為40 km,至廊涿立交,取4段路(基本單元),長度分別為14.2,2.8,4.3,13.7 km;下游對其影響最多8.4 km,至保津互通,取1段路(基本單元),長度為16.2 km。

表1 路段劃分和長度(單位:km)Tab.1 Section divisions and lengths (unit:km)
試驗(yàn)基于Pytorch框架,采用32個(gè)大小相同的卷積核計(jì)算,其中批大小為64,學(xué)習(xí)率為0.001,Dropout為0.5,迭代100次,并將數(shù)據(jù)進(jìn)行Min-Max歸一化處理,預(yù)測未來時(shí)段長度Tp設(shè)置為0.5 h,例如2020-11-26T08:00—08:25,歷史數(shù)據(jù)中分別設(shè)置h,r,z為6,2,2,如圖2所示,其中Th為當(dāng)前時(shí)段前3 h,Tr為前2 d相同時(shí)段,Tz為前2周相同時(shí)段。

圖2 預(yù)測模型中輸入輸出示范Fig.2 Demonstration of input and output in forecasting model
3.2 試驗(yàn)結(jié)果及分析
以2020年11月26日徐水門架斷面為例,圖3(圖中 0為時(shí)間08:00)為采用不同時(shí)間粒度的2步流量預(yù)測值與真實(shí)值對比,圖4和5分別為自由流和擁堵下多步流量預(yù)測值與真實(shí)值對比,其中步長為1~4步,預(yù)測效果評價(jià)指標(biāo)為平均絕對誤差(MAE)、均方誤差(MSE)和平均絕對百分比誤差(MAPE)。可以看出:

圖3 不同時(shí)間粒度預(yù)測值與真實(shí)值對比Fig.3 Comparison of forecast and actual values at different time intervals
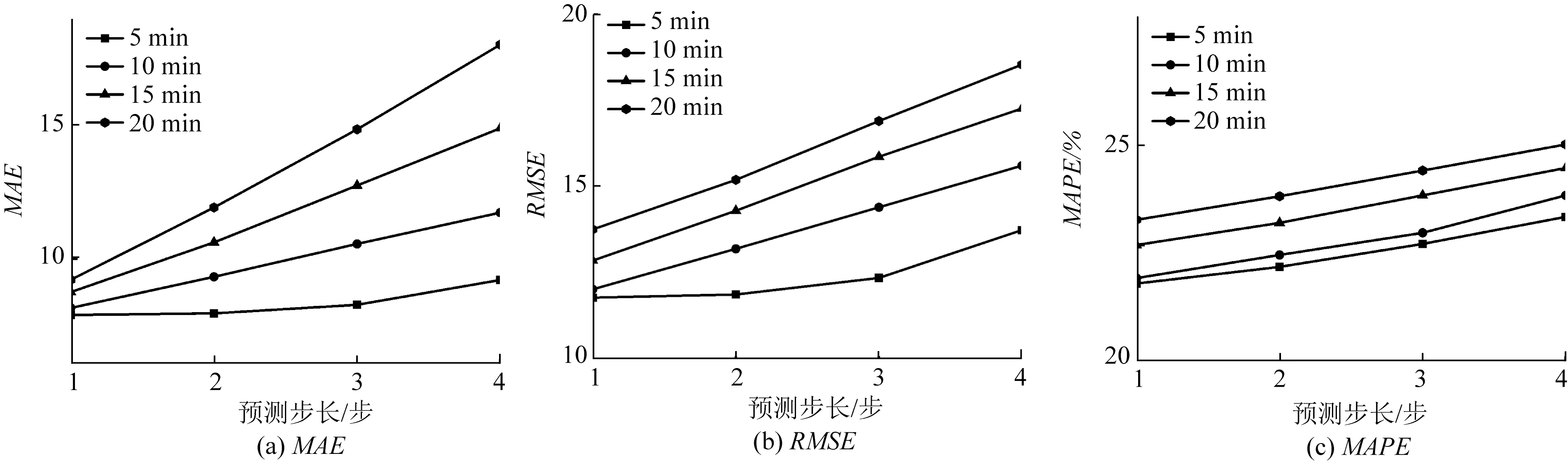
圖4 自由流狀態(tài)下預(yù)測指標(biāo)對比Fig.4 Comparison of forecast indicators in free flow state

圖5 擁堵下預(yù)測指標(biāo)對比Fig.5 Comparison of forecast indicators in congestion state
(1)預(yù)測值和真實(shí)值之間偏差較小,預(yù)測擬合曲線基本反映了未來一段時(shí)間交通流的變化趨勢,表明了本研究交通流多步預(yù)測方法的適用性。同時(shí)由圖3~5可看出,隨粒度的增加,預(yù)測精度稍顯下降,這是因?yàn)殡S時(shí)間粒度的增大,交通流間差異性降低,進(jìn)而模型捕獲交通流時(shí)空差異性的能力逐漸減小所致。
(2)預(yù)測精度隨著預(yù)測步長的增加逐漸減小,這是因?yàn)楸狙芯拷煌鞫嗖筋A(yù)測步長均不小于5 min,精度得到了保障。但作為高度非線性系統(tǒng),隨著預(yù)測步數(shù)的增大,后續(xù)趨勢是否發(fā)生轉(zhuǎn)變,只能依據(jù)原有趨勢進(jìn)行外推。而多步預(yù)測方法由于充分利用注意力機(jī)制和Bi-GRU捕獲時(shí)間特性,采用圖卷積充分捕獲空間影響的特性,捕捉交通流時(shí)空差異性,較好地依據(jù)當(dāng)前狀態(tài)預(yù)測未來短期趨勢,偏差較小,且時(shí)間粒度為5~10 min時(shí),3步內(nèi)的預(yù)測結(jié)果均在合理范圍內(nèi)。
(3)不同交通狀態(tài)對預(yù)測精度產(chǎn)生影響。不同狀態(tài)下隨著預(yù)測步長的增加,評價(jià)指標(biāo)均呈增加趨勢,驗(yàn)證了“預(yù)測是利用原有趨勢外推,誤差會(huì)逐漸增加”的現(xiàn)象。自由流狀態(tài)各指標(biāo)值均小于擁堵交通狀態(tài)下各指標(biāo)值,這是因?yàn)榻煌髯鳛闀r(shí)空分布不均衡的高度非線性系統(tǒng),擁堵下交通流波動(dòng)較大,增加了預(yù)測的難度。雖然精度降低,但由于本研究多步預(yù)測方法充分考慮時(shí)空特性,很好地適應(yīng)交通波動(dòng),預(yù)測精度依然在合理范圍內(nèi),無論是一般狀態(tài)還是擁堵狀態(tài),短時(shí)交通流預(yù)測均能取得較高精度,滿足實(shí)時(shí)管理控制需要。
3.3 與其他方法對比分析
以5 min為時(shí)間粒度進(jìn)行不同預(yù)測方法對比試驗(yàn),其中方法1為本研究交通流多步預(yù)測方法;方法2為“不考慮上下游路段,其他模型計(jì)算同本交通流多步預(yù)測方法”,本研究簡稱為不考慮空間特征方法;方法3為采用圖卷積注意力模型的方法;采用Seq2Seq模型為方法4。圖6和7分別為自由流狀態(tài)和擁堵狀態(tài)下的流量預(yù)測值與真實(shí)值對比。可以看出:

圖6 自由流狀態(tài)下不同方法預(yù)測指標(biāo)對比Fig.6 Comparison of forecast indicators in free flow state with different methods
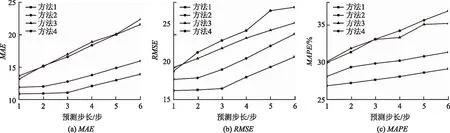
圖7 擁堵狀態(tài)下不同方法預(yù)測指標(biāo)對比Fig.7 Comparison of forecast indicators in congestion state with different methods
(1)在各種預(yù)測方法中,無論是不同的預(yù)測步數(shù),還是交通流處于何種狀態(tài),基于深度學(xué)習(xí)的方法1和2精度高,而方法3和4沒有綜合各種深度學(xué)習(xí)的優(yōu)缺點(diǎn),使其精度較低,特別是在多步預(yù)測時(shí)。
(2)本研究方法預(yù)測精度最高,這是因本研究方法不僅利用雙門控循環(huán)單元提取時(shí)間特征,還考慮了上下游影響范圍并利用圖卷積網(wǎng)絡(luò)提取空間特征,更好地挖掘交通流量時(shí)空特性,使預(yù)測模型更能高度映射內(nèi)部的非線性關(guān)系,能夠滿足工程實(shí)際需要。
(3)隨著預(yù)測步數(shù)的增加,本研究方法誤差增長趨勢更加緩慢,這是因深度學(xué)習(xí)并非要學(xué)習(xí)更多的數(shù)據(jù)信息,無用信息過多反而會(huì)影響模型精度。利用最大限速和反向傳播速度計(jì)算得到上下游影響范圍,將其作為預(yù)測模型的輸入。同時(shí)基于注意力的Seq2Seq策略取得精確的權(quán)重值,提升了多步預(yù)測精度,進(jìn)一步顯示了本研究方法在多步預(yù)測中的優(yōu)勢。
4 結(jié)論
綜合交通流空間分布特征和周期性特點(diǎn),建立了高速公路短時(shí)交通流Bi-AGCGRU-Seq2Seq多步預(yù)測模型,通過試驗(yàn)予以分析驗(yàn)證,證明了本研究交通流多步預(yù)測方法的有效性并能夠滿足多步預(yù)測精度的要求。本研究僅是高速公路交通流預(yù)測的初步研究,尚需針對擁堵下交通流非線性特點(diǎn),結(jié)合其波動(dòng)大的特征研究進(jìn)一步提高預(yù)測精度的改進(jìn)方法,以期對高速公路擁堵下的預(yù)判及控制提供決策支持。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
中國交通信息化(2016年9期)2016-06-06 07:42:10
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
小說月刊(2014年4期)2014-04-23 08:52:20
河南科技(2014年18期)2014-02-27 14:15:06