基于SSA-VMD-GRU 的鋰電池剩余壽命預(yù)測方法研究
2023-11-14 02:12:24丁德鄰張營左洪福
電子元件與材料 2023年9期
丁德鄰 ,張營, ,左洪福
(1.南京林業(yè)大學(xué) 汽車與交通工程學(xué)院,江蘇 南京 210037;2.南京航空航天大學(xué) 民航學(xué)院,江蘇 南京 210016)
鋰離子電池因具有能量密度高、質(zhì)量輕、循環(huán)壽命長等優(yōu)點[1],在新能源汽車和儲能等領(lǐng)域應(yīng)用廣泛。然而,在鋰離子電池持續(xù)充放電過程中,由于其內(nèi)部發(fā)生的不可逆電化學(xué)反應(yīng),會導(dǎo)致電池單體的內(nèi)阻增大、容量減小,使電池單體的性能發(fā)生退化[2]。進(jìn)而導(dǎo)致電池剩余使用壽命(Remaining Useful Life,RUL)的衰減[3]。準(zhǔn)確檢測出鋰離子電池的RUL,不但可以大大提高鋰離子電池的安全性和可靠性,而且還能夠延續(xù)電池的使用壽命[4],減少相關(guān)損耗[5]。
為了跟蹤電池的衰減過程,通常以容量為健康指標(biāo)。一般來說,當(dāng)電池容量到達(dá)額定值的70%時,就認(rèn)為鋰離子電池失效[6]。目前鋰離子電池的RUL 預(yù)測方法可分為兩類: 基于模型的方法和數(shù)據(jù)驅(qū)動的方法。由于數(shù)據(jù)驅(qū)動方法規(guī)避了因為電池內(nèi)部結(jié)構(gòu)、電化學(xué)反應(yīng)等無法建模的復(fù)雜問題[7],因此成為當(dāng)前的研究熱點。數(shù)據(jù)驅(qū)動技術(shù)通過訓(xùn)練大量的數(shù)據(jù),分析鋰電池以往的失效數(shù)據(jù)或工作時健康因子的變化規(guī)律即可實現(xiàn)壽命預(yù)測,但也要求數(shù)據(jù)信息充足且相對穩(wěn)定。目前基于數(shù)據(jù)驅(qū)動的方法有支持向量機(jī)[8]、神經(jīng)網(wǎng)絡(luò)[9]、高斯回歸[10]、貝葉斯蒙特卡洛[11]、基于集成的系統(tǒng)[12]和隱馬爾可夫模型[13]等。
然而,鋰離子電池在退化過程中會出現(xiàn)松弛效應(yīng),松弛效應(yīng)指容量再生現(xiàn)象,其表現(xiàn)為下一周期的容量高于前一周期,并且在接下來伴隨著加速退化[14]。這導(dǎo)致預(yù)測的衰退曲線往往欠擬合。Liu 等[15]使用高斯過程回歸模型捕捉到局部的容量再生,并將高斯過程回歸與長短記憶網(wǎng)絡(luò)(GPR-LSTM)結(jié)合完成提前一步或多步預(yù)測容量。劉家豪等[16]通過結(jié)合長短期記憶網(wǎng)絡(luò)和電化學(xué)阻抗譜理論(LSTM-EIS)對衰減趨勢進(jìn)行了預(yù)測。楊彥茹等[17]提出了一種支持向量回歸(SVR)模型的預(yù)測方法,該方法通過完全集成經(jīng)驗?zāi)J椒纸?CEEMDAN)分解原始數(shù)據(jù),再對分解后的數(shù)據(jù)進(jìn)行預(yù)測,更好地捕捉了容量再生。Yang 等[18]提出了一種混合模型來預(yù)測RUL,該模型將集成經(jīng)驗?zāi)J椒纸?EEMD)、灰狼優(yōu)化和支持向量回歸(GWO-SVR)相結(jié)合,這種分解信號再進(jìn)行預(yù)測的方法一定程度上提高了模型精度,啟發(fā)更多研究人員選擇信號分解與神經(jīng)網(wǎng)絡(luò)結(jié)合的方法來實現(xiàn)健康診斷和故障預(yù)測。
通過信號分解例如經(jīng)驗?zāi)B(tài)分解(EMD)能夠?qū)?fù)雜的電池容量序列數(shù)據(jù)分解為一系列的模態(tài)分量(IMF)。然而,在分解高度復(fù)雜的序列時仍然存在分解不足和過度的問題。為了解決這一問題,后來有學(xué)者提出了變分模態(tài)分解(VMD)方法,該方法具有良好的理論基礎(chǔ)和噪聲魯棒性。但是,在VMD 分解過程中,分解層數(shù)K和懲罰因子α是決定VMD 分解是否能產(chǎn)生良好結(jié)果的兩個重要參數(shù)。王冉等[19]提出了一種基于VMD 和集成深度模型的鋰電池RUL 預(yù)測方法,利用多層感知器和LSTM 對整體退化趨勢和各種波動分量進(jìn)行建模,并手動設(shè)置了VMD 參數(shù)。手動設(shè)置參數(shù)往往依賴人工經(jīng)驗,難以具有自適應(yīng)性。作為經(jīng)典的智能算法之一,麻雀搜索算法(SSA)可以自適應(yīng)選擇最優(yōu)參數(shù),使得算法更加簡單高效。此外,門控循環(huán)單元(GRU)因具有結(jié)構(gòu)簡單和計算效率高等優(yōu)點,被廣泛應(yīng)用于診斷和預(yù)測領(lǐng)域。它在提取復(fù)雜的時間序列和提高預(yù)測模型的精度方面具有突出的優(yōu)勢。
綜上所述,針對容量再生以及信號復(fù)雜問題,本文以容量為健康指標(biāo),結(jié)合SSA 與VMD 自適應(yīng)獲取最優(yōu)參數(shù),提高分解效率,降低原始信號的非光滑性、非線性和復(fù)雜性。同時以GRU 捕捉層序變化過程中的微小變化,預(yù)測信號變化趨勢,并測試了三種預(yù)測模型的精度,基于閾值測算RUL,在NASA 公共數(shù)據(jù)集上驗證模型的有效性。
1 基本理論
1.1 VMD
變分模態(tài)分解(VMD)是一種自適應(yīng)拆解技術(shù),它可以將輸入信號分解為K個調(diào)頻調(diào)幅子信號(即模態(tài)分量IMF),每個模態(tài)分量有不同中心頻率的有限帶寬,具有良好的噪聲魯棒性。基本思想是將信號分解過程轉(zhuǎn)化為約束變分問題,步驟如下:
(1) 構(gòu)建函數(shù)。建立約束模型是為了獲得IMF 分量估計帶寬之和的最小值,約束模型為式(1):
式中:K是模態(tài)分解個數(shù);?t表示求偏導(dǎo);σ(t)是狄拉克分布;y(t)是原始的數(shù)據(jù)信號;uk(t)是y(t)的模態(tài)分量;ωk表示中心頻率;?代表卷積。
(2) 解決變分問題。通過引入二次懲罰因子α和拉格朗日乘法因子θ(t),使得變分問題無約束性。拉格朗日表達(dá)式如式(2)所示。
式中:{uk}和{ωk}表示uk和ωk的集合;〈·,·〉 表示函數(shù)內(nèi)積算子。
使用交替方向乘子法(ADMM)優(yōu)化和更新uk和ωk,以找到約束變分模型的最優(yōu)解,具體表示為式(3):
設(shè)置判別精度δ(δ>0),達(dá)到條件式(4)停止收斂:
計算y(t)和各分量IMFk(t)之間的相關(guān)系數(shù)rk,可得分解信號與原信號的相關(guān)度,rk可表示為式(5):
其中VMD 參數(shù)K與α,本文通過尋優(yōu)算法自適應(yīng)獲取。
1.2 SSA
麻雀搜索算法(SSA)是一種較為新穎的優(yōu)化算法,主要思想是通過模仿麻雀的覓食和反捕食行為來進(jìn)行局部和全局搜索[20]。在麻雀種群中,存在兩種行為模式: 發(fā)現(xiàn)者和跟隨者。發(fā)現(xiàn)者主動尋找豐富的食物來源,并提供覓食方向和區(qū)域,跟隨者通過發(fā)現(xiàn)者獲得食物[21]。在每次迭代期間,發(fā)現(xiàn)者和跟隨者的位置用式(6)和式(7)更新:
式中:t是當(dāng)前迭代次數(shù);表示第i個麻雀在第t次迭代時的第j維位置;T是最大迭代次數(shù);α∈[0,1]是一個隨機(jī)數(shù);Q是服從標(biāo)準(zhǔn)正態(tài)分布的隨機(jī)數(shù);L表示元素均為1 的1×d矩陣;R2∈[0,1]和ST∈[0.5,1]分別表示預(yù)警值和安全值;Xp表示麻雀的最佳位置;Xw表示全局最差位置;A表示1×d維矩陣,每個元素隨機(jī)分配為1 或-1,且A=AT(AAT)-1。
用于偵察警告的麻雀通常占總數(shù)量的10%~20%,位置更新如式(8):
式中:β是步長控制參數(shù);K∈[-1,1]是正態(tài)分布隨機(jī)數(shù),指示麻雀移動方向以及步長;fi表示第i個麻雀的自適應(yīng)值;fg和fw分別表示當(dāng)前全局最佳和最差適應(yīng)值;ε表示常數(shù),避免分母為零。
1.3 SSA-VMD
利用SSA 算法優(yōu)化VMD 的參數(shù)(K和α)。K的取值決定了分解IMF 分量的個數(shù)。如果K值太大,會導(dǎo)致分解過度,產(chǎn)生一些無效的假分量。如果K值太小,則不能充分分解原始信號,而α的大小會影響分量信號的變化趨勢,因此需要確定最優(yōu)組合[K,α]來實現(xiàn)對信號的VMD 充分分解。
本文采用SSA 算法對VMD 參數(shù)進(jìn)行優(yōu)化,選取模型的均方誤差(MSE)作為目標(biāo)函數(shù)。計算公式如式(9)所示。
式中:ym表示目標(biāo)函數(shù);n為采樣點數(shù);yt表示真實值;yti表示預(yù)測值。
使用SSA 優(yōu)化VMD 參數(shù)的流程如下:
(1)SSA 初始化參數(shù),包括種群大小、迭代次數(shù)。設(shè)置K參數(shù)范圍[1,8],設(shè)置α參數(shù)范圍[1,2000],避免設(shè)置范圍過小,導(dǎo)致模態(tài)分量中的特征信息較少。
(2)利用VMD 對鋰離子電池的容量信號進(jìn)行分解,得到多個IMF 分量。
(3)計算每個[K,α]對應(yīng)位置的目標(biāo)函數(shù)值,更新最佳目標(biāo)函數(shù)值。
(4)確定迭代是否完成。輸出最佳[K,α]組合,否則,繼續(xù)迭代。
1.4 GRU
門控循環(huán)單元(GRU)作為另一種基于門的循環(huán)神經(jīng)網(wǎng)絡(luò),其結(jié)構(gòu)更小,性能與LSTM 單元相當(dāng)。GRU由兩個門組成: 重置和更新。GRU 的結(jié)構(gòu)如圖1 所示。rt和zt分別表示重置門和更新門。計算公式如式(10)所示。
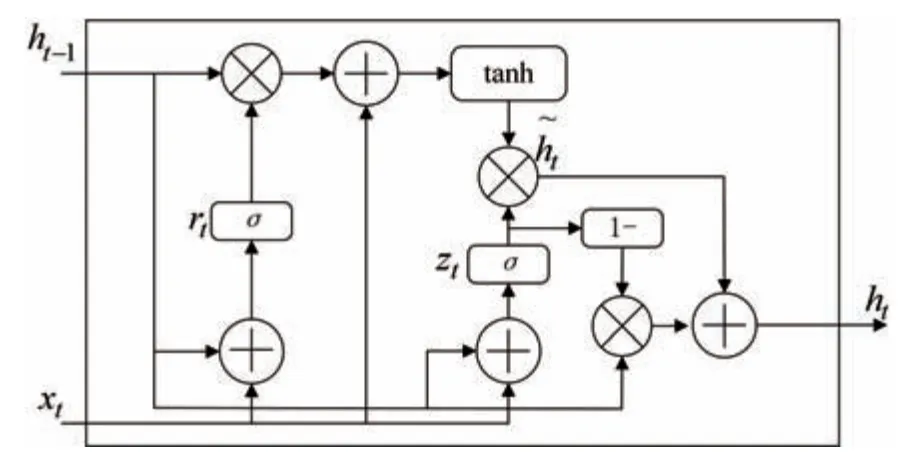
圖1 GRU 結(jié)構(gòu)Fig.1 Structure of GRU
式中:xt為t時刻的輸入信息;ht-1是(t-1)時刻的隱藏狀態(tài);W和U是對應(yīng)的權(quán)重矩陣;b是偏置矩陣;σ表示sigmoid 函數(shù),它將得到的激活結(jié)果變換到0 與1之間;☉表示點積;表示t時刻候選隱藏狀態(tài);ht為t時刻的輸出狀態(tài)。
與RNN 和LSTM 類似,GRU 使用其先前的時間步長輸出和當(dāng)前輸入來計算下一個輸出。GRU 由于具有更低的內(nèi)存需求、更少的可訓(xùn)練參數(shù)和更低的訓(xùn)練時間,因此性能更為優(yōu)異。
1.5 基于SSA-VMD-GRU 方法的實現(xiàn)
本文結(jié)合SSA、VMD 與GRU 方法,整體流程如圖2,主要步驟如下。
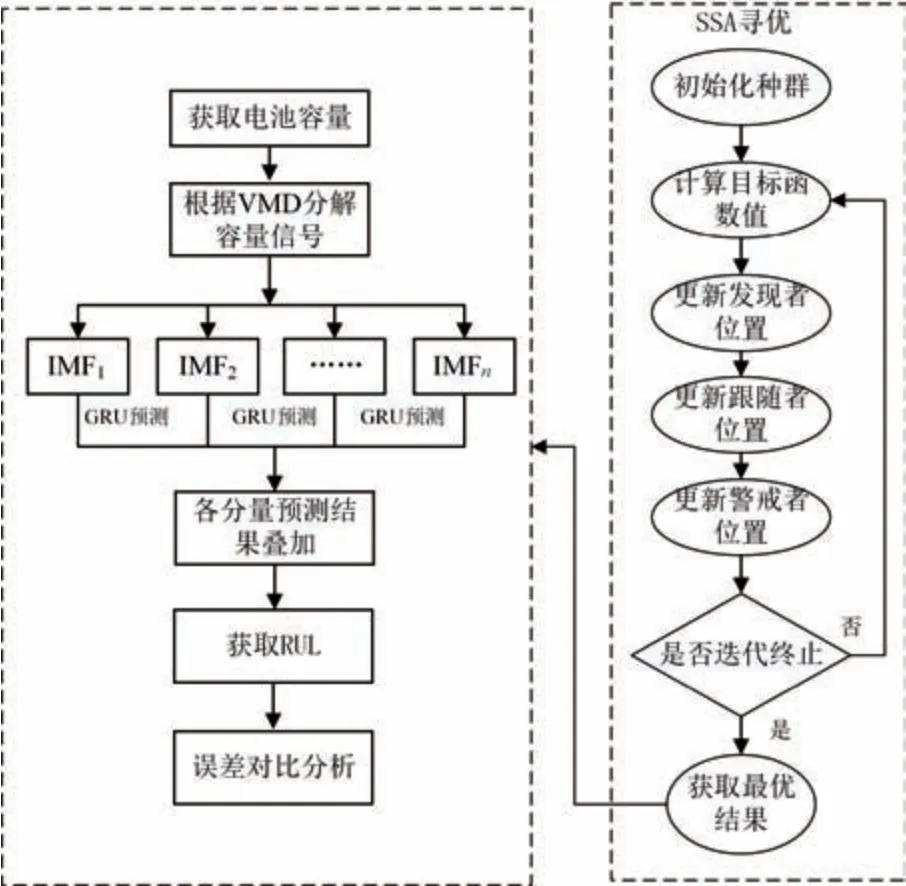
圖2 預(yù)測流程Fig.2 Prediction flowchart
(1) 獲取電池性能衰退數(shù)據(jù),提取容量C,記為C1,C2,…,Cn。其中,Ci表示第i個周期所對應(yīng)的容量值,i=1,2,…,n(n表示總的循環(huán)數(shù))。
(2) 利用VMD 對數(shù)據(jù)進(jìn)行分解,同時采用SSA對關(guān)鍵參數(shù)K與α進(jìn)行尋優(yōu),目標(biāo)函數(shù)為均方誤差(MSE) 最小值。最終分解得到各模態(tài)分量IMF1,IMF2,…,IMFn。
(3) 基于分解的各個分量分別構(gòu)建模型預(yù)測,分別劃分訓(xùn)練集與測試集,訓(xùn)練集記為{x,y},測試集記為{xt,yt},將訓(xùn)練集{x,y}代入模型,xt作為模型的輸入,輸出yti。
(4) 將各個預(yù)測結(jié)果疊加,即可得到最終預(yù)測結(jié)果。獲取電池RUL,通過誤差指標(biāo)評估精度。
1.6 評價指標(biāo)
為了評估該方法的預(yù)測性能,使用均方根誤差(Root Mean Square Error,ERMS)和平均絕對百分比誤差(Mean Absolute Percentage Error,EMAP)評估模型容量預(yù)測精度,使用絕對誤差(Absolute Error,EA)評估RUL 預(yù)測精度,評價指標(biāo)分別如式(11)、式(12)和式(13)所示:
式中:R表示RUL 真實值;Rp表示RUL 預(yù)測值。若評價指標(biāo)值越小,則精度越高。
2 實驗分析
2.1 數(shù)據(jù)
本文中的實驗數(shù)據(jù)來自美國宇航局發(fā)布的電池數(shù)據(jù)集。通過在室溫下對鋰離子電池進(jìn)行充放電來測量容量退化數(shù)據(jù)。當(dāng)電池容量低于閾值時,可以判斷電池功能失效。由于電池容量下降到額定值的70%時可以認(rèn)定為失效,故本次實驗的電池容量失效閾值定為1.3 A·h。本文以B5 與B6 電池為例,對所提出的方法進(jìn)行了分析和驗證。電池容量衰減曲線如圖3 所示。隨著循環(huán)周期的增加,電池的總?cè)萘砍氏陆第厔?但由于某些循環(huán)中的容量再生現(xiàn)象,曲線略有反彈。
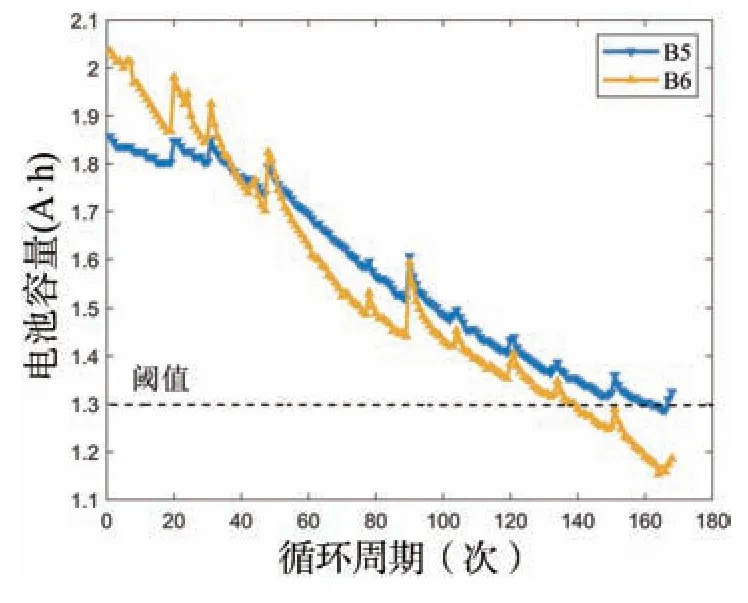
圖3 電池容量衰減Fig.3 Capacity degradation of battery
2.2 VMD 信號分解
經(jīng)SSA 優(yōu)化后輸出B5、B6 電池的最佳VMD 參數(shù)組合如表1 所示。
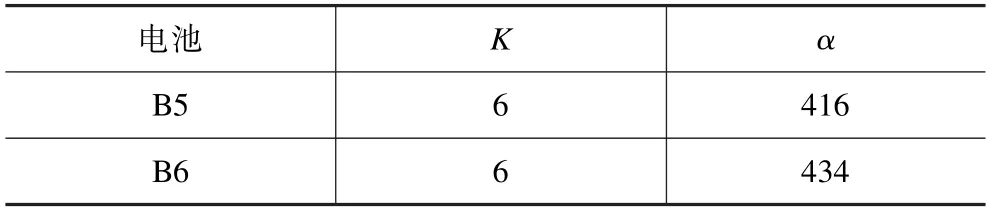
表1 參數(shù)組合Tab.1 Parameter combination
已知VMD 最優(yōu)參數(shù)組合,B5 和B6 分解如圖4所示,其分量與原信號的相關(guān)系數(shù)如表2 所示,為了驗證K和α對分解效果的影響,以B5 為例再將K設(shè)置為6,α設(shè)置為1000 和K設(shè)置為3,α設(shè)置為416 與EMD 分解效果及最優(yōu)分解效果作對比,效果如圖5 所示。由表2 可以看出,鋰電池B5 和B6 中IMF6 的相關(guān)系數(shù)最高,說明與原始信號相關(guān),且其容量退化趨勢也與原信號相近。而其他各IMF 均較低,則視為與原始信號弱相關(guān),是由于電池劣化以及容量再生等干擾帶來的不規(guī)則分量。這也進(jìn)一步證明了電池衰退的過程是非線性和非平穩(wěn)的,通過信號分解可以有效降低信號復(fù)雜度。
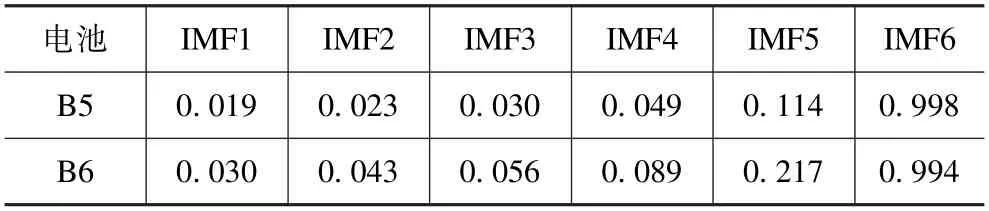
表2 兩組電池分量和原始信號之間的相關(guān)系數(shù)Tab.2 Correlation coefficient between two sets of battery components and the original signal
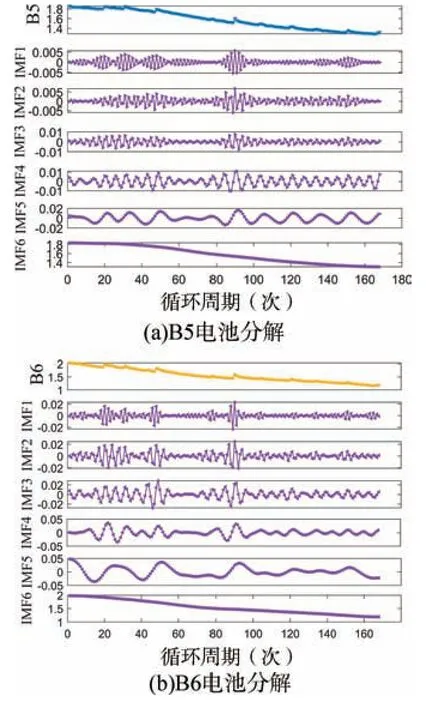
圖4 兩組電池容量信號分解圖Fig.4 Decomposition diagram of two battery capacity signals
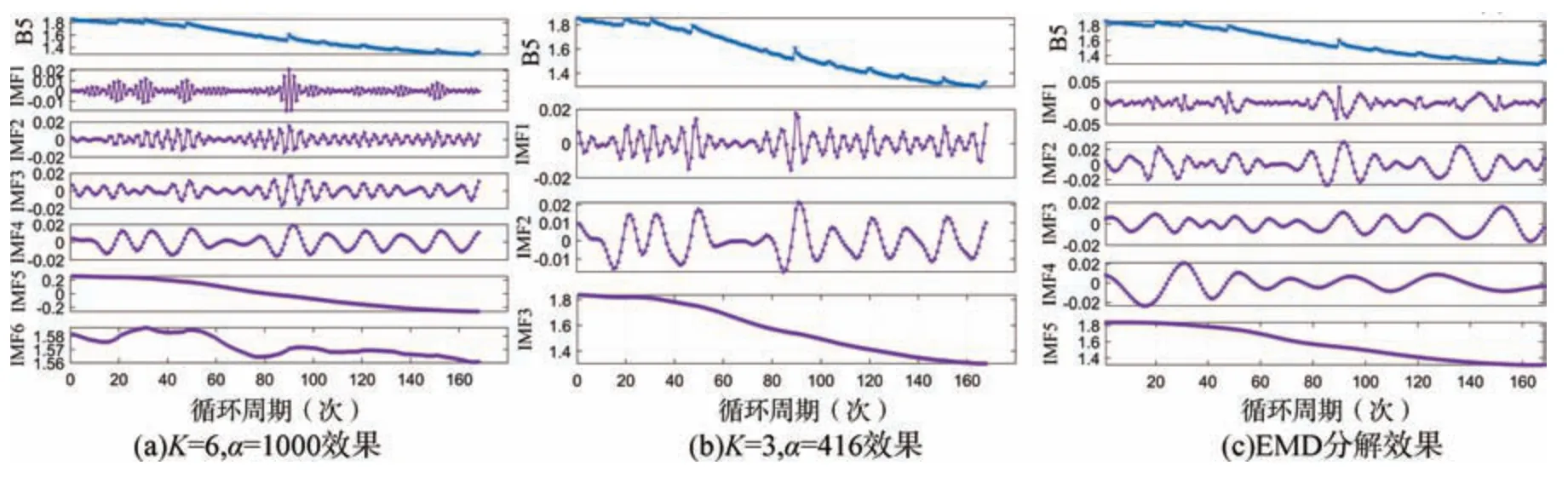
圖5 三種分解方式效果圖Fig.5 Three decomposition methods renderings
相比于自適應(yīng)選擇參數(shù),圖5(a)中的IMF5 和IMF6 可以觀察到,α的大小會影響分量信號的變化趨勢,使得對衰退趨勢的捕捉受到影響。結(jié)合圖5(b)與圖4 可以看到,分解個數(shù)K對分解結(jié)果產(chǎn)生直接影響,由于K值設(shè)置過小導(dǎo)致目標(biāo)曲線欠分解,無法降低曲線的復(fù)雜程度,這種情況下,預(yù)測模型可能無法提供更高的預(yù)測精度,K與α均會最終決定預(yù)測結(jié)果的準(zhǔn)確率,而圖5(c)的EMD 分解則存在模態(tài)混疊現(xiàn)象,特征信息不明顯。本文所采用的方法充分分解了鋰離子電池信號,能夠更好地表達(dá)全局衰退趨勢特征,并且不需要再手動設(shè)置參數(shù),擺脫了經(jīng)驗依賴。
2.3 預(yù)測結(jié)果
為了驗證實驗的有效性,分別以原數(shù)據(jù)的30%,50%和70%用作訓(xùn)練集訓(xùn)練模型,然后將剩余的數(shù)據(jù)用作測試模型,同時與EMD-GRU 模型和單一LSTM模型進(jìn)行比較。
將已分解的分量的訓(xùn)練集數(shù)據(jù)作為模型的輸入進(jìn)行預(yù)測,再將分量預(yù)測結(jié)果進(jìn)行融合得到最終的電池容量結(jié)果如圖6 所示。
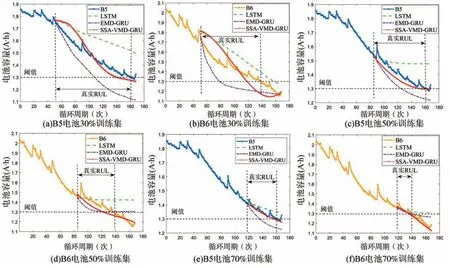
圖6 三種訓(xùn)練集比例的預(yù)測結(jié)果Fig.6 Prediction results of three training set proportions
三種方法容量預(yù)測的誤差以及RUL 的誤差統(tǒng)計如表3 所示,部分預(yù)測曲線未到失效閾值,故以“-”表示。
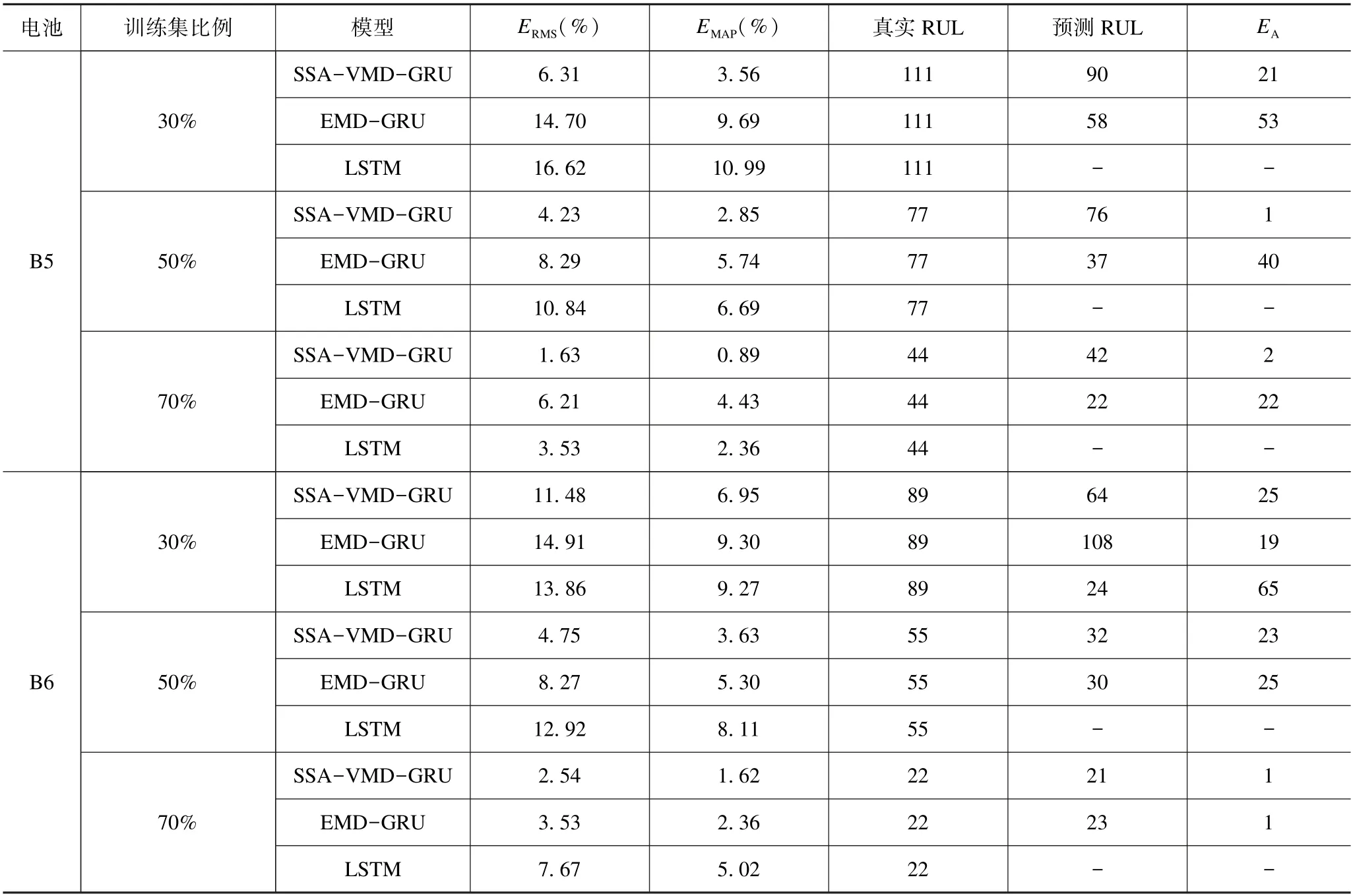
表3 三種方法不同訓(xùn)練集比例下的預(yù)測誤差與RUL 預(yù)測誤差Tab.3 Prediction error and RUL prediction error under different training set ratios of three methods
綜合比較預(yù)測結(jié)果和評價指標(biāo),總結(jié)如下:
(1)從圖6 和表3 可以看出,本文方法的預(yù)測結(jié)果明顯優(yōu)于LSTM 和EMD-GRU。當(dāng)B5 電池以30%比例訓(xùn)練模型時,本文方法相比于EMD-GRU 與LSTM分別提升了57%與61%,以50%比例訓(xùn)練模型時分別提升了50%與60%,以70%比例訓(xùn)練模型時分別提升了73%與54%,這兩種方法可以在一定程度上反映容量的退化趨勢,然而隨著循環(huán)周期的增加,誤差也變大,而SSA-VMD-GRU 能夠更好地追蹤容量的變化,并且在不同電池、不同起點下的預(yù)測曲線更能反映電池信號的衰退,預(yù)測較為穩(wěn)定。在RUL 預(yù)測方面,本文提出的SSA-VMD-GRU 方法預(yù)測結(jié)果的誤差更小,預(yù)測精度較高,相比于另兩種方法均提升50%以上。組合模型的預(yù)測能更好地抓住容量的走勢,這表明通過對容量進(jìn)行優(yōu)化分解,建立預(yù)測模型,能更好地預(yù)測高度非線性和非平穩(wěn)的數(shù)據(jù),為獲取RUL 提供至關(guān)重要的信息。
(2)從表3 不同訓(xùn)練集比例的結(jié)果來看,訓(xùn)練集的數(shù)量直接影響了預(yù)測模型的精度,訓(xùn)練數(shù)據(jù)越多,預(yù)測精度越高。當(dāng)訓(xùn)練集樣本較少時,可以看到模型誤差明顯增大,RUL 預(yù)測更加困難,訓(xùn)練集樣本越多,模型精度越高,預(yù)測曲線越貼合原信號走勢,RUL 預(yù)測也越準(zhǔn)確。
(3)從圖6 和表3 可以看出,組合模型EMD-GRU相比于LSTM,由于EMD 對容量信號進(jìn)行了分解,降低了容量再生的影響,使得其效果相對好于LSTM 模型,但仍低于本文所用方法。進(jìn)一步分析由于VMD方法避免了EMD 的模態(tài)混疊的影響,并且經(jīng)過超參數(shù)的優(yōu)化,較好地降低了信號的復(fù)雜性,使得分解效果更加優(yōu)異,因而預(yù)測效果顯著提高。故本文方法在預(yù)測精度上具有明顯的優(yōu)勢。
3 結(jié)論
本文以NASA 電池數(shù)據(jù)作為實驗數(shù)據(jù),為提高預(yù)測性能,采取以VMD 分解原始信號的方法構(gòu)建了SSA-VMD-GRU 模型預(yù)測電池RUL 并得出以下結(jié)論:
(1)針對電池在退化過程中的再生影響,利用VMD 分解技術(shù)將原始信號分解為多個分量,降低數(shù)據(jù)的非線性和非平穩(wěn)性,再通過GRU 模型預(yù)測,實驗表明該模型有效降低了容量再生對RUL 預(yù)測的干擾。
(2)面對VMD 分解過程中,K與α影響了分解效果,手動設(shè)置參數(shù)依賴人工經(jīng)驗難以具有普適性的難題,本文結(jié)合SSA 尋優(yōu)確定參數(shù)來建立組合模型的方式具有較好的普適性,并且相比于人工選擇參數(shù)的方式來說精度也相對較高,對其余部件的壽命預(yù)測提供了優(yōu)化分解原始數(shù)據(jù)的思路和模型搭建方法。
由于本文是以容量作為特征研究,考慮到放電電流、放電電壓以及溫度在電池放電循環(huán)周期中對容量變化的影響,提取更加具有表征性的健康因子還有待進(jìn)一步研究,從而進(jìn)一步提高RUL 預(yù)測精度。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
湖北經(jīng)濟(jì)學(xué)院學(xué)報·人文社科版(2015年8期)2015-12-29 05:53:07
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
上海電機(jī)學(xué)院學(xué)報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39