拼接式航測(cè)相機(jī)自適應(yīng)輻射一致性校正方法
2023-11-10 08:41:18尚志鳴姜灣劉秀文高進(jìn)鐘燦陳捷
航天返回與遙感 2023年5期
尚志鳴 姜灣 劉秀 文高進(jìn) 鐘燦 陳捷
拼接式航測(cè)相機(jī)自適應(yīng)輻射一致性校正方法
尚志鳴1姜灣2劉秀1文高進(jìn)1鐘燦1陳捷3
(1 北京空間機(jī)電研究所,北京 100094)(2 國(guó)家博物館,北京 100079)(3 海軍潛艇學(xué)院,青島 266000)
國(guó)內(nèi)外高端航測(cè)相機(jī)不斷追求擴(kuò)展攝影幅面以提升作業(yè)效率,但探測(cè)器制造能力對(duì)相機(jī)單一幅面擴(kuò)展形成了制約,多鏡頭、多探測(cè)器拼接技術(shù)成為大幅面高端航測(cè)相機(jī)的重要發(fā)展路線。文章針對(duì)拼接式航測(cè)相機(jī)虛擬拼接影像各子影像亮度不一致的問(wèn)題,提出一種無(wú)需輸入先驗(yàn)參數(shù),自主選擇參考子影像,使用子影像間設(shè)計(jì)重疊區(qū)域亮度統(tǒng)計(jì)特征(均值、標(biāo)準(zhǔn)差)一致性約束,構(gòu)建線性校正模型,通過(guò)最小二乘優(yōu)化求解各個(gè)子影像的校正參數(shù)。文章方法針對(duì)虛擬拼接影像,可以無(wú)先驗(yàn)、自適應(yīng)地計(jì)算最優(yōu)校正參數(shù),有效抑制拼接式相機(jī)多鏡頭、多探測(cè)器間輻射不一致的現(xiàn)象,提升影像品質(zhì)。經(jīng)試驗(yàn)驗(yàn)證,提出方法與現(xiàn)有算法相比,校正后的虛擬拼接影像的均勻性在定量分析與視覺(jué)效果兩方面均有顯著提升。
輻射一致性校正 亮度特征一致性約束 最小二乘法 拼接式航攝相機(jī)
0 引言
以大幅面成像為主要特點(diǎn)的先進(jìn)航攝相機(jī)能夠?qū)崿F(xiàn)高精度、高效率、高品質(zhì)的航空攝影,為大范圍的地理信息獲取提供了高效率保障。受制于探測(cè)器制造水平制約,使用單探測(cè)器成像的相機(jī)難以大幅提升成像幅面,通過(guò)多鏡頭、多探測(cè)器組合構(gòu)造拼接式相機(jī)成為實(shí)現(xiàn)大幅面成像的重要技術(shù)路線[1-4]。然而,多鏡頭多探測(cè)器拼接式相機(jī)中,各探測(cè)器受制于不同鏡頭光照、差異化的工作環(huán)境、后背響應(yīng)差異等因素影響,拼接后獲取的虛擬影像易出現(xiàn)以不同探測(cè)器對(duì)應(yīng)的子影像為單元的明暗相間的輻射差異現(xiàn)象,影響了最終虛擬拼接影像的視覺(jué)效果。
使用實(shí)驗(yàn)室或?qū)嶒?yàn)場(chǎng)均勻場(chǎng)景定標(biāo)[5-7]的方法可以抑制相機(jī)的輻射亮度不一致現(xiàn)象[8-10]。但是實(shí)驗(yàn)室定標(biāo)方法需要大口徑積分球等高端儀器設(shè)備,過(guò)程繁瑣,成本較高。同時(shí),實(shí)驗(yàn)室定標(biāo)結(jié)果為固定的校正參數(shù)。僅在增益、積分時(shí)間等航測(cè)相機(jī)參數(shù)實(shí)驗(yàn)室定標(biāo)與實(shí)際航空攝影大體一致時(shí),使用實(shí)驗(yàn)室定標(biāo)參數(shù)校正影像才能達(dá)到最優(yōu)的效果。實(shí)際飛行作業(yè)中,地物目標(biāo)亮度,航測(cè)相機(jī)參數(shù)多種多樣,有限的定標(biāo)條件與多變的實(shí)際情況形成矛盾,制約了校正效果的提升。
基于影像場(chǎng)景進(jìn)行后處理也可以實(shí)現(xiàn)影像的輻射一致性校正[11],馬斯克(MASK)算法[12-14]通過(guò)去除影像低頻信息差異實(shí)現(xiàn)了影像輻射均勻效果。SWDC-4航測(cè)相機(jī)[15-16]虛擬拼接影像在對(duì)子影像使用MASK掩膜進(jìn)行均勻化處理后,以任一子影像組為參考影像,計(jì)算其標(biāo)準(zhǔn)差、均值,通過(guò)直方圖匹配或曲線灰階映射表形式將其余子影像的統(tǒng)計(jì)指標(biāo)與參考影像調(diào)整一致。李德仁等提出使用Wallis濾波實(shí)現(xiàn)多幅待拼接影像間的一致性輻射校正,并得到廣泛應(yīng)用[12,17-18]。文獻(xiàn)[19-21]提出的矩匹配及相應(yīng)改進(jìn)方法被廣泛應(yīng)用在衛(wèi)星遙感影像輻射一致性校正方面。
其中,Wallis濾波方法與矩匹配方法均采用線性校正模型,具有計(jì)算量小、效率高、應(yīng)用廣泛的優(yōu)勢(shì)。經(jīng)典的Wallis濾波與矩匹配方法假設(shè)待校正影像與參考影像具有相似的地物場(chǎng)景,從而利用參考影像的亮度特征指標(biāo)計(jì)算待校正影像的變換參數(shù)[22]。然而拼接式航測(cè)相機(jī)為提升成像幅面,子影像間重疊面積小,成像場(chǎng)景差異大,不符合上述假設(shè),制約了經(jīng)典Wallis濾波或矩匹配方法的應(yīng)用。
針對(duì)上述問(wèn)題,在Wallis濾波與矩匹配思想基礎(chǔ)上,本文提出一種拼接式航攝相機(jī)自適應(yīng)輻射一致性校正方法,該方法不使用先驗(yàn)參數(shù),對(duì)每一幅拼接影像,依據(jù)其子影像間設(shè)計(jì)重疊區(qū)域內(nèi)的亮度特征進(jìn)行優(yōu)化目標(biāo)函數(shù)構(gòu)建,使用最小二乘方法進(jìn)行校正參數(shù)的優(yōu)化計(jì)算。該方法既避免了實(shí)驗(yàn)室測(cè)量的固定輻射校正參數(shù)難以適應(yīng)所有航攝應(yīng)用場(chǎng)景的問(wèn)題,又避免了基于影像場(chǎng)景校正常見(jiàn)方法中基準(zhǔn)圖像與待校正影像場(chǎng)景差異引入的誤差。不同場(chǎng)景的影像以各自重疊區(qū)域影像為基準(zhǔn),按照提出的約束條件和優(yōu)化目標(biāo)方程計(jì)算出適合當(dāng)前影像的線性校正參數(shù),從而實(shí)現(xiàn)航攝相機(jī)的無(wú)先驗(yàn)、自適應(yīng)輻射一致性校正。
1 基于Wallis濾波與矩匹配的線性校正模型
Wallis濾波與矩匹配均廣泛應(yīng)用于輻射校正中,都將待校正影像的灰度均值和標(biāo)準(zhǔn)差映射到給定的灰度均值和標(biāo)準(zhǔn)差值,而上述均值、標(biāo)準(zhǔn)差通常由參考影像計(jì)算得到。Wallis濾波的具體表示如下

此時(shí)濾波公式變?yōu)?/p>




由(2)~(4)式可知,矩匹配與典型Wallis濾波計(jì)算方法一致,均可表達(dá)為

由式(5)可見(jiàn),Wallis濾波與矩匹配都采用影像的標(biāo)準(zhǔn)差和均值作為影像亮度的特征指標(biāo),按照待校正影像校正后的均值、標(biāo)準(zhǔn)差與參考影像一致的原則構(gòu)造線性校正方程。均值和標(biāo)準(zhǔn)差作為影像亮度特征指標(biāo)計(jì)算簡(jiǎn)便;線性模型僅有增益、偏置兩個(gè)參數(shù),求解計(jì)算量少,速度快。因此本文借鑒Wallis濾波或矩匹配思想,采用影像亮度特征一致性約束和線性校正模型,在此基礎(chǔ)上,針對(duì)多鏡頭多探測(cè)器拼接式航測(cè)相機(jī)各個(gè)子影像間具有多重疊區(qū)域約束、小重疊面積、場(chǎng)景差異大的問(wèn)題,采用多區(qū)域約束、最小二乘自適應(yīng)求解的方法實(shí)現(xiàn)拼接式航攝相機(jī)自適應(yīng)輻射一致性校正。
2 拼接式航測(cè)相機(jī)自適應(yīng)輻射一致性校正

拼接式航測(cè)相機(jī)自適應(yīng)輻射一致性校正的流程如圖2所示,包括選擇參考影像、一致性約束模型構(gòu)建、校正參數(shù)自適應(yīng)優(yōu)化和對(duì)各個(gè)子影像進(jìn)行輻射校正四個(gè)步驟,具體步驟如下。
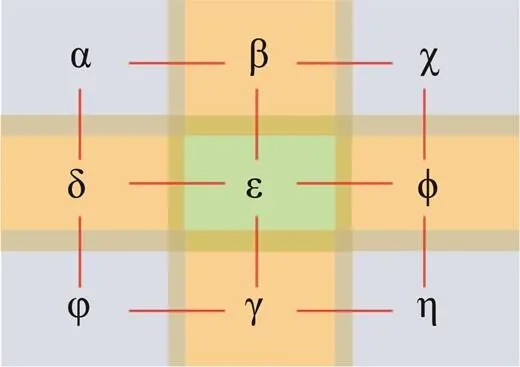
圖1 3×3拼接式航測(cè)相機(jī)等效影像示意

圖2 拼接式航測(cè)相機(jī)輻射一致性校正流程圖
2.1 選擇參考子影像
2.2 一致性約束模型構(gòu)建與最小二乘求解
對(duì)于拼接式航攝相機(jī)拍攝的一景影像,首先遍歷其中每個(gè)探測(cè)器獲取的子影像,將相鄰子影像設(shè)計(jì)重疊區(qū)域作為相鄰子影像間的約束區(qū)域,使用中值濾波、均值濾波等去噪算法,對(duì)其進(jìn)行濾波去噪,去噪后,計(jì)算各個(gè)重疊約束區(qū)域的均值與標(biāo)準(zhǔn)差統(tǒng)計(jì)指標(biāo)。
然后構(gòu)建線性輻射校正模型,如式(6)所示。






遍歷一景影像中各子影像,構(gòu)建全圖約束模型。根據(jù)每個(gè)子影像與其它子影像間重疊相鄰關(guān)系,將每一組相鄰約束按照公式(13)、(14)構(gòu)建校正參數(shù)約束模型,圖1所示的子影像間存在12組約束關(guān)系,可構(gòu)建24個(gè)方程,聯(lián)立方程,即可獲取包括所有子影像的校正參數(shù)的約束模型方程組。

由于誤差的存在,上述方程不能夠精確相等,因此,將其改寫(xiě)為
式(16)為線性約束方程組,v(=1, 2, ···, 24)為每個(gè)約束方程的殘差。9組子影像間形成12組重疊區(qū)域約束關(guān)系,構(gòu)成了24個(gè)獨(dú)立的線性約束方程,超過(guò)未知數(shù)數(shù)量,滿足求解條件。
令

2.3 輻射校正
3 數(shù)據(jù)與試驗(yàn)
使用自主研發(fā)拼接式測(cè)繪相機(jī)數(shù)據(jù)開(kāi)展試驗(yàn)。相機(jī)采取多鏡頭多探測(cè)器拼接成像的技術(shù)體制。由于相機(jī)采取鏡頭垂直下視的總體設(shè)計(jì),且探測(cè)器本身具有較為良好的均勻性,在陸地等紋理復(fù)雜區(qū)域子影像間輻射差異視覺(jué)上不明顯。但是在水體等對(duì)影像輻射差異敏感的均勻場(chǎng)景,探測(cè)器間的輻射不一致制約了影像品質(zhì)和視覺(jué)效果。
選取長(zhǎng)江江面場(chǎng)景數(shù)據(jù)作為試驗(yàn)數(shù)據(jù),如圖3所示,原始拼接影像由3行×3列明暗不一的子影像構(gòu)成。由于原始拼接影像較大,將其重采樣至2 252像素×1 643像素大小展示、分析。
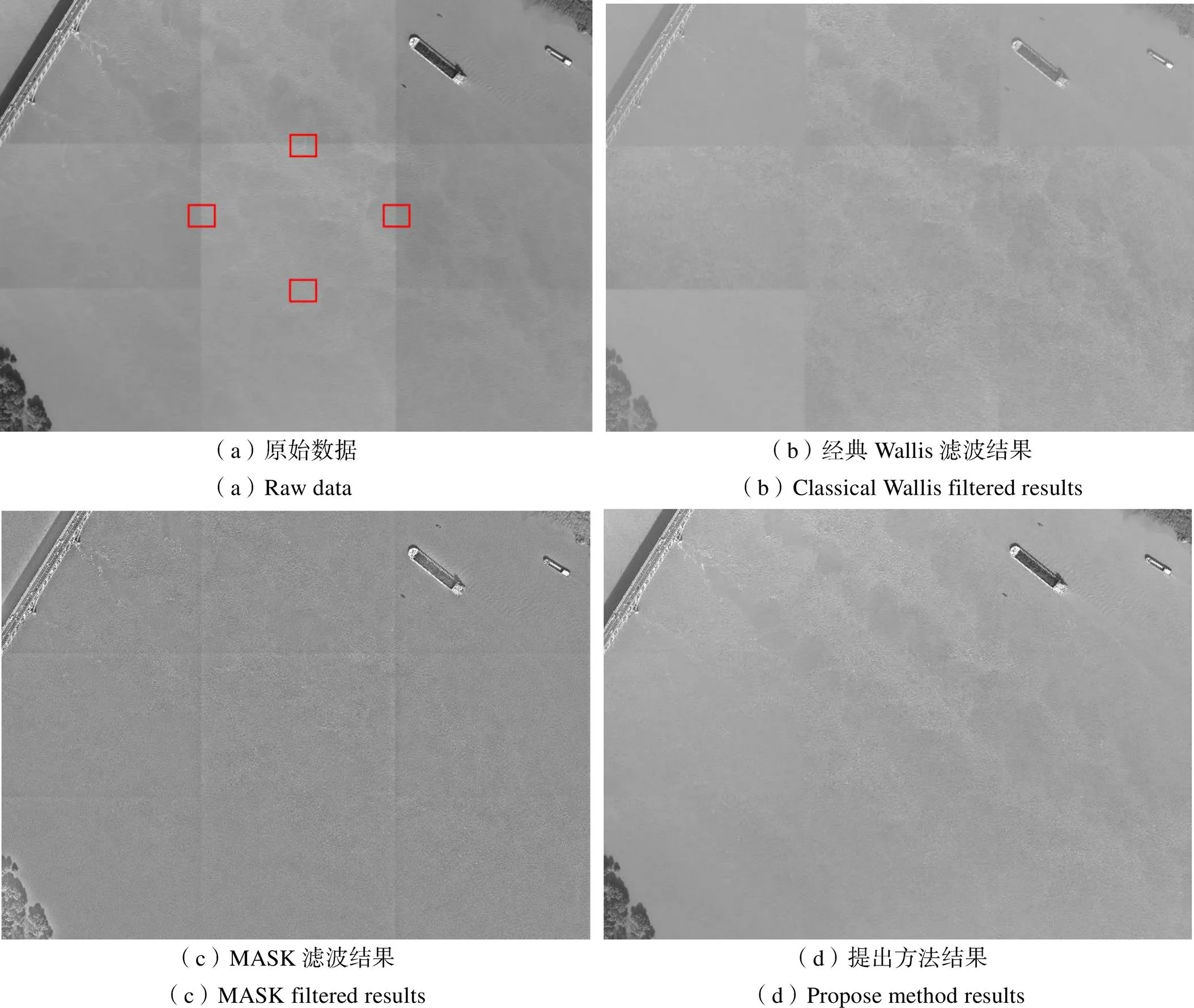
圖3 水體場(chǎng)景虛擬拼接影像
圖3(a)為校正前的原始虛擬拼接影像,其各個(gè)子影像輻射信息不一致,具有明顯明暗不一的“馬賽克”現(xiàn)象,不僅直接降低了視覺(jué)效果,也對(duì)圖像中水流等跨子影像邊界地物的解譯、分析帶來(lái)了困難。圖3(b)為各個(gè)子影像進(jìn)行了經(jīng)典Wallis濾波校正后的虛擬拼接影像。Wallis濾波校正時(shí),選擇中心子影像作為基準(zhǔn),對(duì)其它子影像進(jìn)行校正。校正后,純水體子影像由于其與基準(zhǔn)子影像語(yǔ)義信息基本一致,輻射一致性有一定改善。但包含橋梁、陸地和船只的子影像與水體子影像,由于與基準(zhǔn)子影像的場(chǎng)景差異,其校正后子影像交界處接縫明顯,有顯著的視覺(jué)差異,且上述子影像校正后的標(biāo)準(zhǔn)差被抑制,對(duì)比度下降,水體細(xì)節(jié)損失大。圖3(c)虛擬拼接影像進(jìn)行了MASK濾波[1]處理,可以改善輻射一致性效果,但MASK 濾波時(shí)減去影像的低頻信息再補(bǔ)償其均值,造成了影像細(xì)節(jié)損失和失真。圖3(d)各子影像經(jīng)過(guò)文章突出的一致性校正,各子影像交界處的水面平滑均勻,無(wú)明顯接縫。同時(shí)影像細(xì)節(jié)信息被很好保留,如大橋支柱引起的水流波紋痕跡等清晰完整,輪廓分明。
使用影像均勻性指標(biāo)ICV[12-14]定量評(píng)價(jià)本文算法的輻射一致性校正效果。ICV指標(biāo)計(jì)算方法如下

因此選取虛擬拼接影像中不含地物的4個(gè)子影像交界區(qū)域100像素×100像素影像(圖3(a)紅框所示區(qū)域,次序按照順時(shí)針排布)評(píng)價(jià)子影像間均勻性校正效果,對(duì)原始影像、Wallis濾波、MASK濾波與本文提出算法,分別計(jì)算其ICV均勻性指標(biāo),結(jié)果如下。
表1 ICV參數(shù)結(jié)果對(duì)比

Tab.1 Comparison of ICV parameter results
如表1所示,提出算法在四個(gè)采樣區(qū)域均具有最好的數(shù)值表現(xiàn)。通過(guò)視覺(jué)對(duì)比與指標(biāo)計(jì)算可知,本文算法與常規(guī)算法相比顯著提升了校正后影像的視覺(jué)效果與地物解譯能力。
4 結(jié)束語(yǔ)
本文提出了一種拼接式航測(cè)相機(jī)自適應(yīng)輻射一致性校正方法,該方法使用任意相鄰子影像重疊區(qū)域的標(biāo)準(zhǔn)差、均值一致作為約束條件,構(gòu)建線性校正模型,并使用最小二乘方法對(duì)校正參數(shù)優(yōu)化求解。本文方法不需實(shí)驗(yàn)室測(cè)量先驗(yàn)參數(shù),可以獨(dú)立對(duì)影像進(jìn)行輻射一致性校正,也可以在實(shí)驗(yàn)室校正后對(duì)影像進(jìn)行二次校正。經(jīng)試驗(yàn)驗(yàn)證,校正后虛擬拼接影像各子影像均勻性較已有算法顯著提升,且保留了各子影像內(nèi)部細(xì)節(jié)。校正后影像視覺(jué)效果好,有較強(qiáng)的實(shí)際應(yīng)用價(jià)值。
[1] 林宗堅(jiān), 宣文玲, 孫杰, 等. 由小面陣CCD組合構(gòu)成寬角航空相機(jī)[J]. 測(cè)繪科學(xué), 2005, 30(1): 94-98. LIN Zongjian, XUAN Wenling, SUN Jie, et al. Wide-angled Aerial Camera Made by Combining Small-Sized Areal Array CCD Sensors[J]. Science of Surveying and Mapping, 2005, 30(1): 94-98. (in Chinese)
[2] 李健, 劉先林, 萬(wàn)幼川, 等. SWDC-4數(shù)碼航空相機(jī)虛擬影像生成[J]. 武漢大學(xué)學(xué)報(bào)(信息科學(xué)版), 2008, 33(5): 450-453. LI Jian, LIU Xianlin, WANG Youchuan, et al. Generation of SWDC-4 Aerial Digital Camera Virtual Images[J]. Geomatics and Information Science of Wuhan University, 2008, 33(5): 450-453. (in Chinese)
[3] ZHOU Qi, DUAN Yansong, LIU Xiu, et al. AFC-900 Large-Format Aerial Frame Camera: Design Principles and Photogrammetric Processing[C]//12th International Conference on Information Optics and Photonics (CIOP 2021), July 23-26, 2021, Xi?an, China. SPIE, 2021: 1205713-1-1205713-8.
[4] FANG Y, HU H, GAO L, et al. A Geometric Calibration Model for the New Ultra-Large Frame Aerial Mapping Camera DMZ II[J]. The Photogrammetric Record, 2020, 35(170): 289-312.
[5] 何靈莉, 胡秀清, 王玲, 等. 基于自動(dòng)化方法的光學(xué)載荷定標(biāo)跟蹤[J]. 航天返回與遙感, 2020, 41(6): 103-113. HE Lingli, HU Xiuqing, WANG Ling, et al. Calibration Tracking of the Optical Payload Based on Automatic Methods[J]. Spacecraft Recovery & Remote Sensing, 2020, 41(6): 103-113. (in Chinese)
[6] 劉莉, 陳林, 徐寒列, 等. “委遙二號(hào)”衛(wèi)星長(zhǎng)波紅外通道在軌輻射定標(biāo)[J]. 航天返回與遙感, 2019, 40(3): 94-102. LIU Li, CHEN Lin, XU Hanlie, et al. On-Orbit Radiometric Calibration in Long Wave Infrared Band of VRSS-2 Satellite[J]. Spacecraft Recovery & Remote Sensing, 2019, 40(3): 94-102. (in Chinese)
[7] 李巖, 陳洪耀, 方舟, 等. “巴遙一號(hào)”衛(wèi)星雙相機(jī)在軌絕對(duì)輻射定標(biāo)及精度分析[J]. 航天返回與遙感, 2019, 40(6): 77-88.LI Yan, CHEN Hongyao, FANG Zhou, et al. On-Orbit Absolute Radiometric Calibration and Accuracy Analysis for Dual Camera of PRSS-1 Satellite[J]. Spacecraft Recovery & Remote Sensing, 2019, 40(6): 77-88. (in Chinese)
[8] 陳彥紅. 新型航測(cè)相機(jī)DMZII影像相對(duì)輻射校正方法研究[D]. 西安: 長(zhǎng)安大學(xué), 2017. CHEN Yanhong. Research on Relative Radiation Correction Method of DMZ II Image for New Aerial Camera[D]. Xi’an: Chang’an University, 2017. (in Chinese)
[9] 修吉宏, 黃浦, 李軍, 等. 大面陣彩色CCD航測(cè)相機(jī)的輻射定標(biāo)[J]. 光學(xué)精密工程, 2012, 20(6): 1365-1373.XIU Jihong, HUANG Pu, LI Jun, et al. Radiometric Calibration of Large Area Array Color CCD Aerial Mapping Camera[J]. Optics and Precision Engineering, 2012, 20(6): 1365-1373. (in Chinese)
[10] 馬遠(yuǎn)征. 國(guó)產(chǎn)大面陣航測(cè)相機(jī)DMZ II攝影數(shù)據(jù)快速處理技術(shù)[D]. 西安: 長(zhǎng)安大學(xué), 2018. MA Yuanzheng. The Fast Processing Technology of the Photogrammetric Data Captured by Domestic Large-Array Digital Aerial Camera DMZII[D]. Xi’an: Chang’an University, 2018. (in Chinese)
[11] 韓宇韜. 數(shù)字正射影像鑲嵌中色彩一致性處理的若干問(wèn)題研究[D]. 武漢: 武漢大學(xué), 2014. HAN Yutao. Research on Key Technology of Color Consistency Processing for Digtial Ortho Map Mosaicing[D]. Wuhan: Wuhan University, 2014. (in Chinese)
[12] 李德仁,王密,潘俊.光學(xué)遙感影像的自動(dòng)勻光處理及應(yīng)用[J].武漢大學(xué)學(xué)報(bào)(信息科學(xué)版),2006,31(9):753-756. LI Deren, WANG Mi,PAN Jun. Auto-Dodging Processing and Its Application for Optical RS Images[J]. Geomatics and Information Science of Wuhan University,2006,31(9):753-756. (in Chinese)
[13] 王密, 潘俊. 一種數(shù)字航空影像的勻光方法[J]. 中國(guó)圖象圖形學(xué)報(bào)A輯, 2004, 9(6): 744-748.WANG Mi, PAN Jun. A Method of Removing the Uneven Illumination for Digital Aerial Image[J]. Journal of Image and Graphics(A), 2004, 9(6): 744-748. (in Chinese)
[14] 張振, 朱寶山, 朱述龍, 等. 小波變換改進(jìn)的MASK勻光算法[J]. 遙感學(xué)報(bào), 2009, 13(6): 1074-1081.ZHANG Zhen, ZHU Baoshan, ZHU Shulong, et al. Improved MASK Dodging Method Based on Wavelet[J]. Journal of Remote Sensing, 2009, 13(6): 1074-1081. (in Chinese)
[15] 段福洲. 近地輕型數(shù)碼航空攝影測(cè)量系統(tǒng)研究[D]. 北京: 首都師范大學(xué), 2007.DUAN Fuzhou. Research on Near Ground Digital Aerial Photogrammetry System[D]. Beijing: Capital Normal University, 2007. (in Chinese)
[16] 吳文靜. SWDC航空數(shù)碼相機(jī)的影像拼接與處理技術(shù)研究[D]. 焦作: 河南理工大學(xué), 2011.WU Wenjing. Image Joining and Processing Technology Study of SWDC Aerial Digital Camera[D]. Jiaozuo: Henan Polytechnic University, 2011. (in Chinese)
[17] 潘俊. 立體正射影像無(wú)縫鑲嵌技術(shù)研究[D]. 武漢: 武漢大學(xué), 2005.PAN Jun. The Research on Seamless Mosaic Approach of Stereo Orthophoto[D]. Wuhan: Wuhan University, 2005. (in Chinese)
[18] 張力, 張祖勛, 張劍清. Wallis濾波在影像匹配中的應(yīng)用[J]. 武漢測(cè)繪科技大學(xué)學(xué)報(bào), 1999, 24(1): 24-27. ZHANG Li, ZHANG Zuxun, ZHANG jianqing. The Image Matching Based on Wallis Filtering[J]. Journal of Wuhan Technical University of Surveying and Mapping, 1999, 24(1): 24-27. (in Chinese)
[19] SHEN Huanfeng, JIANG Wan, ZHANG Hongyan. A Piecewise Approach to Removing the Nonlinear and Irregular Stripes in Modis Data[J]. International Journal of Remote Sensing, 2014, 35(1): 44-53.
[20] 姜灣, 沈煥鋒, 曾超, 等. Terra MODIS數(shù)據(jù)28波段影像條帶噪聲去除方法[J]. 武漢大學(xué)學(xué)報(bào)(信息科學(xué)版), 2014, 39(5): 526-530.JIANG Wan, SHEN Huanfeng, ZENG Chao, et al. Destriping Method for Band 28 of Terra MODIS Images[J]. Geomatics and Information Science of Wuhan University, 2014, 39(5): 526-530. (in Chinese)
[21] SHANG Z, JIANG W, WEN G, et al. A Striping Removal Method Based on Spectral Correlation in MODIS Data[C]// Proceedings of Image and Graphics Technologies and Applications, IGTA 2020: 1314. Singapore: Springer, 2020: 17-28.
[22] 任中杰. 遙感瓦片影像色彩一致性研究[D]. 贛州: 江西理工大學(xué), 2019.REN Zhongjie. Study on Color Consistency of Remote Sensing Tile Images[D]. Ganzhou: Jiangxi University of Science and Technology, 2019. (in Chinese)
[23] 陳佳妮. 最小二乘估計(jì)的性質(zhì)[J]. 哈爾濱師范大學(xué)自然科學(xué)學(xué)報(bào), 2016, 32(5): 7-8. CHEN Jiani. The Nature of the Least Squares Estimate[J]. Natural Science Journal of Harbin Normal University, 2016, 32(5): 7-8. (in Chinese)
Self-Adaptive Radiation Consistency Correction Method for Spliced Aerial Mapping Camera
SHANG Zhiming1JIANG Wan2LIU Xiu1WEN Gaojin1ZHONG Can1CHEN Jie3
(1 Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)(2 National Museum, Beijing 100079, China)(3 Navy Submarine Academy, Qingdao 266000, China)
Advanced aerial mapping cameras at home and abroad are constantly pursuing the expansion of the photographic format to improve operational efficiency. However, the manufacturing capacity of detectors restricts the expansion of the single format of the camera. Multi-lens and multi-detector splicing technology has become an important development route for large-format advanced aerial mapping cameras. A method without priori parameters is proposed, which independently selects the reference sub-images, uses the consistency constraints of the brightness statistical features (image mean, variance) in the overlapping regions to build a linear correction model, and solves the problem of each sub-image through least squares optimization correction parameters. For different virtual spliced images, the method has no prior and self-adaptive calculation of optimal correction parameters, and the calculation amount is small, which can quickly and effectively suppress the phenomenon of radiation inconsistency among multiple lenses and multiple detectors of spliced cameras, and improve image quality. Experiment shows that compared with the existing algorithm, the uniformity of the corrected virtual stitched image is significantly improved in both quantitative analysis and visual effect.
radiation consistency correction; luminance feature consistency constraints; least squares optimization; splicing aerial mapping camera
V445
A
1009-8518(2023)05-0083-08
10.3969/j.issn.1009-8518.2023.05.010
2023-02-05
尚志鳴, 姜灣, 劉秀, 等. 拼接式航測(cè)相機(jī)自適應(yīng)輻射一致性校正方法[J]. 航天返回與遙感, 2023, 44(5): 83-90.
SHANG Zhiming, JIANG Wan, LIU Xiu, et al. Self-Adaptive Radiation Consistency Correction Method for Spliced Aerial Mapping Camera[J]. Spacecraft Recovery & Remote Sensing, 2023, 44(5): 83-90. (in Chinese)
(編輯:龐冰)
猜你喜歡
公民與法治(2022年5期)2022-07-29 00:47:28
教學(xué)考試(高考物理)(2021年5期)2021-11-08 10:31:22
歷史教學(xué)問(wèn)題(2021年4期)2021-11-05 07:02:34
中醫(yī)眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
兒童故事畫(huà)報(bào)(2019年5期)2019-05-26 14:26:14
中國(guó)公共安全(2017年11期)2017-02-06 05:28:08
Coco薇(2016年2期)2016-03-22 02:42:52
燕山大學(xué)學(xué)報(bào)(2015年4期)2015-12-25 02:19:49
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
