基于自行式液壓模塊化運輸車的稱重技術研究
2023-11-08 07:45:06楊風艷徐學軍寧一凡
中國修船 2023年5期
關鍵詞:系統
楊風艷,徐學軍,王 蒙,寧一凡
(海洋石油工程(青島)有限公司,山東青島 266520)
自行式液壓模塊化運輸車(SPMT)有多個軸線,每個軸線可以獨立轉向和升降,通過電子控制系統實現同步操作。作為特種運輸設備,SPMT具有載重量大、運動靈活的優勢,主要應用于重型和超大型結構物的運輸,在港口碼頭大件滾裝、裝備制造業、海洋石油、化工、橋梁建造等工程領域應用廣泛[1-2]。
為進一步發掘SPMT 的應用范圍,根據SPMT的自身特點,本文對SPMT 高精度稱重技術進行研究,利用SPMT 自身升降功能,通過在SPMT 車板上布置重量傳感器,實現大型結構物稱重及運輸裝船過程的整合。SPMT 稱重系統支持2 種稱重模式:①重量傳感器稱重模式;②液壓傳感器稱重模式。本文主要對重量傳感器稱重模式進行論述。通過對該系統的研究,最終掌握了SPMT 稱重方案設計及現場自主實施的相關技術,有效縮減了稱重工期,節省施工成本。
1 SPMT稱重系統基本原理
1.1 稱重模式
重量傳感器稱重模式工作原理示意圖見圖1,稱重過程說明如下。
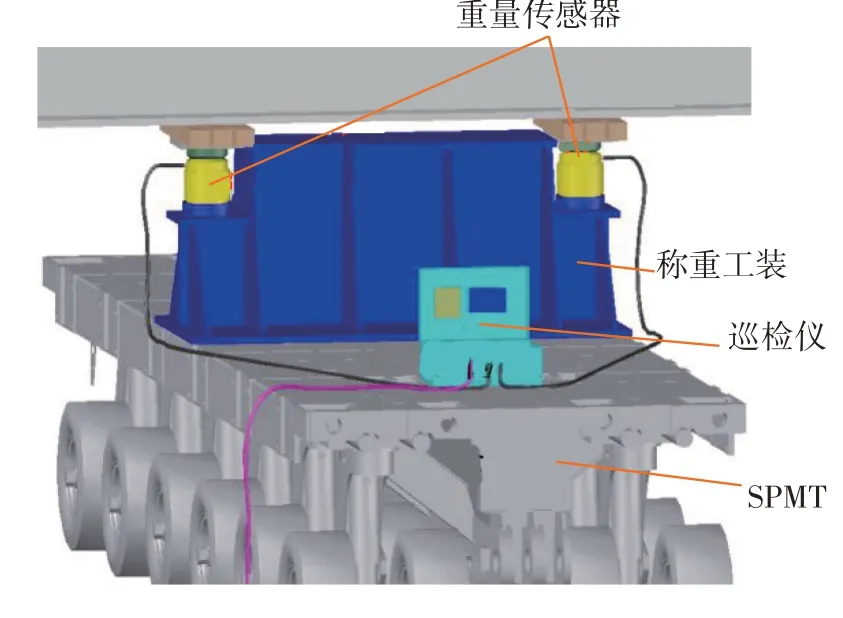
圖1 重量傳感器稱重模式工作原理示意圖
1)在SPMT 車板上布置支撐墊墩,并在墊墩上安裝重量傳感器。被稱重物放置在重量傳感器之上,其重量通過傳感器傳遞至支撐墊墩和SPMT車板。
2)各重量傳感器連接至巡檢儀,由巡檢儀采集并傳輸重量數據至上位機。
3)上位機軟件根據所有重量傳感器的數值,計算得到被稱重結構物的整體重量和重心位置。
1.2 數據采集和傳輸系統
SPMT 稱重系統需要采集的數據包括重量傳感器數據和位移傳感器數據。2 類傳感器數據均采用4~20 mA 模擬量信號,通過模擬量采集器實時采集,并通過可編程邏輯控制器(PLC)單元進行數據處理。然后通過以太網上傳至上位機系統的數據庫。
以太網相比RS-485總線具有更高的通訊速率,尤其是遠距離傳輸時,不會因為距離增加而導致傳輸速度明顯衰減。對于存在干擾的使用環境,采用帶有屏蔽層的超五類網線,可以實現雙向穩定連續通訊,延遲時間短。以太網數據傳輸支持總線模式和串聯2種連接形式。同時,以太網滿足即插即用的要求,可以熱插拔,在開機狀態下可以增加或刪除節點,使用方便。
1.3 系統誤差分析與誤差控制方法
1)傳感器引起的誤差。傳感器精度誤差是產品標定時固有的誤差,在使用中無法控制。選型時要求重量傳感器精度誤差小于全量程的0.5%。長期使用后可能發生零點漂移現象,造成校準誤差。校準誤差可以通過2種方法解決:①定期對傳感器進行校準;②利用軟件校準功能,在測量前先將所有傳感器空載讀取零點數值,并基于該零點完成后續稱重工作。
2)SPMT 車體變形引起的誤差。SPMT 車體在受到不均勻壓力時會產生彈性變形,導致擱置在SPMT 上的墊墩位置和角度發生變化。對于重量傳感器稱重模式來說,如果墊墩與水平面夾角不等于90°,則傳感器對應的壓力不等于其承擔的重量,將會影響計算精度。根據彈性變形確定SPMT 的整體變形曲線,確定各支撐墊墩與水平面夾角的變化量,通過夾角變化量計算重量傳感器壓力的垂向分量,將該垂向分量作為其承擔的重力分量,可減小車體變形對重量計算精度的影響。
3)測量環境的因素引起的誤差。測量環境因素主要包括風、溫度、雨雪等對測量精度的影響。
當被稱重物受風面積較大時,風力會對其產生不可忽略的作用力,從而影響測量精度。消除風力誤差有2種方法:①盡量在風速較低的天氣條件下進行稱重,保證稱重作業的風速不超過系統說明書規定的范圍;②在風速較大的環境中,現場安裝風速測量儀器,根據實時風速數據選擇風速相對穩定和較低的時刻進行稱重,并且多次讀數取平均值,以減小陣風帶來的誤差。
溫度變化會導致傳感器特性發生變化,從而影響輸出信號。為了減小溫度誤差,應該選擇具有良好溫度補償功能的傳感器,并且盡量避免在溫差較大或者日照直射等極端情況下進行稱重。
雨雪天氣會增加被稱重物和傳感器表面的濕度,從而影響電氣特性和機械特性。為了減小濕度誤差,應該選擇具有防水防潮功能的傳感器,并且在可能出現降水情況下及時覆蓋設備。
由于影響因素眾多且難以量化,上述分析只能作為定性參考。系統最終的測量誤差需要通過實際測試確定,并根據測試結果對系統進行相應調整。
2 硬件設計方案
硬件設計主要包括現場巡檢儀、琴式控制柜和集裝箱控制室3部分。
2.1 現場巡檢儀設計方案
現場巡檢儀采用金屬箱體結構,便于攜帶和安裝。箱體內部安裝有PLC、模擬量采集模塊、交換機、直流電源、斷路器等設備。箱體正面設有液晶顯示屏,用于顯示各路傳感器數據。箱體外側設有16 個模擬量數據采集接口、2 個5 芯以太網線接口和2 個220 V 電源接口。巡檢儀內部接線原理示意圖如圖2所示。

圖2 巡檢儀內部接線原理示意圖
2.2 琴式控制柜設計方案
琴式控制柜內部安裝有工業電腦、打印機、變壓器、以太網交換機等設備,以及2 臺24 寸液晶顯示屏。此外,琴式控制柜內還分別設置了強電控制箱和弱電控制箱,用于放置強電和弱電相關設施。琴式控制柜面板上設置了總電源開關、24 V 電源開關、工業電腦開關和狀態指示燈等元件。
2.3 控制室設計方案
集裝箱控制室采用長度為5.898 m 的標準集裝箱,中間隔斷分為前后2個房間。前面房間為控制室,內部安裝琴式控制柜、空調等設備,用于完成SPMT 稱重操作。后面房間為儲存間,內部存放巡檢儀、數據線、各類傳感器等稱重系統所需設施。
3 軟件設計方案
3.1 軟件開發的基本原則
1)采用參數化模板和人機圖形交互相結合的方式建立工程管理模型。利用稱重管理模板,將常見的稱重問題定義為參數化模型。建模時,選擇模板,設置通用類型的模型參數,然后通過交互式建模系統,在圖形界面或電子表格中完成具體方案設計。
2)建模與稱重管理功能分離。方案設計人員在辦公室臺式機上制定方案,包括坐標系、工程信息、稱重物幾何尺寸和屬性、SPMT軸線、SPMT布置、SPMT 懸掛、各類傳感器設置和連接等。稱重過程監控利用琴式控制柜內的主機完成。主機通過網絡或移動存儲設備將工程模型復制到工業電腦(上位機),打開上位機軟件并加載模型即可開始稱重工作,無需建模操作。
3)稱重監控時,傳感器數據由巡檢儀內的PLC 采集,并通過以太網發送至上位機數據采集模塊。上位機數據采集模塊將數據存儲到數據庫中。監控管理模塊讀取數據庫中的數據,計算當前狀態參數,并繪制重量曲線圖、傳感器歷史數據曲線圖、傳感器圖形顯示等,輔助完成稱重監控。數據采集模塊與過程監控模塊只通過數據庫交換數據。
4)軟件具有良好的容錯性。當用戶輸入非法數據時,系統提示錯誤輸入,并避免系統異常。軟件具有自動保存功能,在系統意外關閉時保存當前狀態,并在系統重啟后自動恢復。
系統基本模塊原理見圖3。

圖3 系統基本模塊原理圖
3.2 上位機軟件的功能模塊
1)建模模塊。建模模塊包括模板管理和交互建模2個子模塊。通過參數化模板,將常見的稱重配置定義為與軟件無關的資源,包括稱重類型、模式、坐標系、平板車、傳感器、巡檢儀連接和輸出文檔等。在模板中,部分參數設置為可調整的變量,通過改變變量值,可以得到不同的方案。實際應用時,根據工程特點,從模板庫中選取合適的模板,然后通過調整變量和微調細節,快速建立稱重工程模型。
2)數據庫管理模塊。數據庫管理模塊負責數據庫的建立和管理,實時存儲網絡通信模塊采集的傳感器數據,并根據稱重管理模塊的查詢指令,查詢歷史數據,并繪制曲線圖、生成表格或自動生成稱重報告。數據庫管理模塊還實現對數據的有效性檢驗、異常數據處理和數據備份。
3)網絡通信模塊。網絡通信模塊包括網絡傳輸和巡檢儀配置2 個子模塊。網絡傳輸子模塊用于實現上位機與巡檢儀之間的數據通信,包括接收傳感器數據和發送控制指令。控制指令包括巡檢儀地址設置、采集頻率設置等。巡檢儀配置子模塊用于配置巡檢儀的網絡信息,包括傳感器連接關系、參數范圍、名稱和IP地址等。
4)稱重管理與監控模塊。稱重管理與監控模塊包括稱重過程的圖形顯示、聲音圖像報警、重量重心控制曲線和傳感器數據曲線的計算與繪制,以及稱重報告的生成等。
傳感器數據通過俯視圖、表格和曲線圖3 種形式顯示。俯視圖顯示被稱重結構軸線、傳感器圖標、編號和數值。表格顯示各軸的傳感器數據。曲線圖顯示各路傳感器數據隨時間變化的趨勢。
5)文檔自動化模塊。文檔自動化模塊可自動生成PDF格式的稱重報告。報告由封面、目錄和正文組成。正文中包括稱重原理、傳感器參數與配置、稱重參數設置、承載物概述、傳感器數值列表和圖形顯示、重量重心計算數據和分析結果等。
4 系統測試
該系統在某LNG 項目模塊上進行了測試。在重復性條件及復現性條件下,對模塊的重量及重心坐標進行了6 次獨立重復觀測,SPMT 稱重系統現場稱重數據見表1,其中LX為重心X坐標,LY為重心Y坐標。正態分布情況下,采用極差法評定獲得重量及重心坐標測得值的試驗標準偏差s(xk)為:
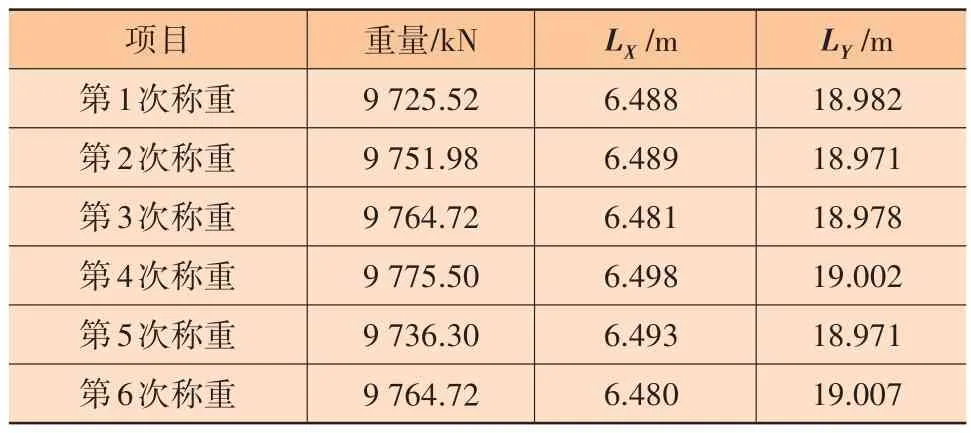
表1 SPMT稱重系統現場稱重數據
式中,xk為多次測量中重量及重心坐標測得值;R為極差,等于模塊重量及重心坐標測得值的最大值與最小值之差;C為極差系數,當測量次數為6時,C為2.53。
模塊重量及重心坐標的標準不確定度uA()為:
得到系統擴展不確定度UA為:
得到系統相對擴展不確定度Urel為:
式中,n為測量次數;xˉ為n次測量所得重量及重心坐標測得值的算術平均值;k為置信因子,k=2。
采用上述公式分別對重量及重心坐標的不確定度進行了計算,SPMT 稱重系統不確定度計算結果見表2。
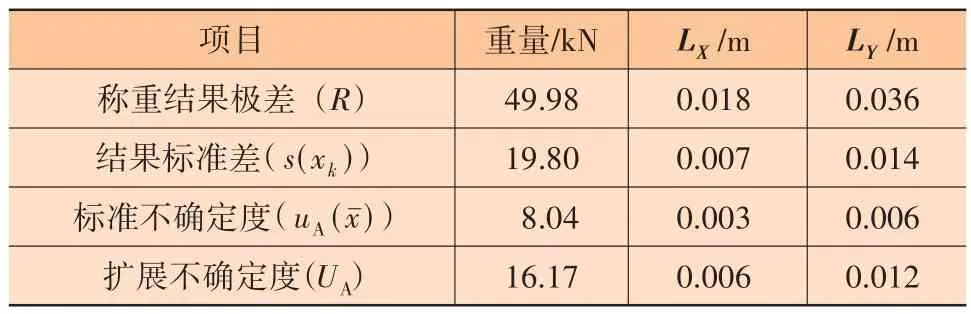
表2 SPMT稱重系統不確定度計算結果
根據測試結果得出,稱重重量相對擴展不確定度 為0.17%。 滿 足ISO19901-5 《Petroleum and natural gas industries - Specific requirements for offshore structures - Part 5: Weight control during engineering and construction》要求的1%精度級別。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32