復(fù)合材料層板OFDR 分布式光纖沖擊判位方法研究?
2023-11-06 07:27:50鐘照振李艷芬白瑜芳黃繼偉
振動(dòng)、測(cè)試與診斷 2023年5期
鐘照振,曾 捷,李艷芬,白瑜芳,黃繼偉,綦 磊
(1.南京航空航天大學(xué)機(jī)械結(jié)構(gòu)力學(xué)及控制國家重點(diǎn)實(shí)驗(yàn)室 南京,210016)(2.北京強(qiáng)度環(huán)境研究所 北京,100076)(3.北京衛(wèi)星環(huán)境工程研究所 北京,100094)
引言
復(fù)合材料結(jié)構(gòu)具有比強(qiáng)度大、耐疲勞性能和耐久性好等特點(diǎn),已被廣泛應(yīng)用于航空航天領(lǐng)域[1]。航空航天器在服役過程中易受諸如鳥撞、空間碎片以及彈擊等外物沖擊[2],特別是一些能量較小的低速?zèng)_擊,雖然在物體表面未留下痕跡,但會(huì)導(dǎo)致復(fù)合材料結(jié)構(gòu)內(nèi)部出現(xiàn)微裂紋、分層以及纖維斷裂等目視不可檢損傷,這將導(dǎo)致其抗拉、抗壓強(qiáng)度等力學(xué)性能下降[3]。因此,開展針對(duì)復(fù)合材料層板結(jié)構(gòu)的沖擊載荷位置辨識(shí)方法研究,對(duì)于保障飛行安全、提升維護(hù)檢修效率具有重要意義。
目前,國內(nèi)外常用于沖擊載荷位置辨識(shí)的傳感器主要涉及壓電傳感器和光纖光柵傳感器。其中,壓電傳感器具有靈敏度高、響應(yīng)快速等優(yōu)點(diǎn),但其需要配置大量信號(hào)傳輸線纜,易受電磁干擾,因此在航空航天器在軌/在役結(jié)構(gòu)健康監(jiān)測(cè)領(lǐng)域受到一定限制。光纖傳感器具有抗電磁干擾、高絕緣強(qiáng)度、體積小、質(zhì)量輕以及集信號(hào)傳感與傳輸于一體等優(yōu)點(diǎn),便于構(gòu)建分布式傳感網(wǎng)絡(luò)。蘆吉云[4]利用小波包對(duì)碳纖維增強(qiáng)聚合物復(fù)合材料夾層結(jié)構(gòu)的布拉格光柵傳感器(fiber Bragg grating,簡(jiǎn)稱FBG)沖擊響應(yīng)信號(hào)進(jìn)行特征提取,并采用支持向量機(jī)(support vector machine,簡(jiǎn)稱SVM)對(duì)沖擊載荷實(shí)現(xiàn)定位。Pratik等[5]提出采用100 kHz 高速FBG 解調(diào)儀監(jiān)測(cè)沖擊信號(hào),結(jié)合樣本數(shù)據(jù)庫實(shí)現(xiàn)沖擊定位。上述2 類方法均需事先采集大量沖擊響應(yīng)樣本數(shù)據(jù),不僅工作量大,還會(huì)影響被測(cè)結(jié)構(gòu)力學(xué)性能甚至造成預(yù)先損傷。
光頻域反射型(optical frequency domain reflectometry,簡(jiǎn)稱OFDR)光纖傳感器采用波長(zhǎng)橫掃干涉儀測(cè)量背向瑞利散射,能夠連續(xù)監(jiān)測(cè)光纖沿線應(yīng)變響應(yīng)信息。目前,OFDR 光纖傳感器廣泛應(yīng)用于航空航天器結(jié)構(gòu)健康監(jiān)測(cè)領(lǐng)域。Murayama 等[6]利用OFDR技術(shù)對(duì)兩個(gè)不同結(jié)構(gòu)粘貼膠層的內(nèi)部不均勻應(yīng)力進(jìn)行了測(cè)量。Ciminello等[7]采用分布式光纖傳感器來記錄復(fù)材加筋板受沖擊下的應(yīng)變,監(jiān)測(cè)結(jié)構(gòu)的沖擊損傷。
筆者采用OFDR 光纖傳感器獲取復(fù)合材料層板結(jié)構(gòu)應(yīng)變響應(yīng)信息,并在此基礎(chǔ)上提出一種基于應(yīng)變幅值非線性加權(quán)原理的沖擊載荷判位方法,該方法無需訓(xùn)練樣本,具有較好的工程適用性。
1 OFDR 分布式光纖傳感原理
1.1 相干探測(cè)原理
OFDR 傳感基本原理主要基于相干探測(cè)技術(shù)[8],其光路探測(cè)結(jié)構(gòu)由信號(hào)光、參考光、光耦合器、混頻信號(hào)、光電探測(cè)器以及拍頻信號(hào)等部分組成,相干探測(cè)技術(shù)原理如圖1 所示。
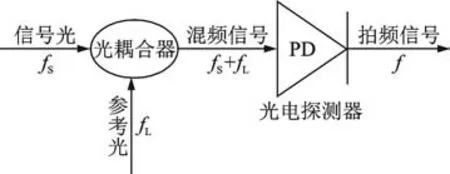
圖1 相干探測(cè)技術(shù)原理Fig.1 Schematic of coherent detection technology
在相干探測(cè)系統(tǒng)中,信號(hào)光和參考光經(jīng)光耦合器后變?yōu)榛祛l信號(hào),混頻信號(hào)經(jīng)光電探測(cè)器后轉(zhuǎn)化為拍頻信號(hào),其中拍頻信號(hào)的頻率代表了信號(hào)光和參考光的頻率之差[8]。
假設(shè)信號(hào)光與參考光的光場(chǎng)[8]分別為
其中:ωS,ωL分別為信號(hào)光與參考光的頻率;ES,EL分別為信號(hào)光與參考光的光強(qiáng)。
在線性掃頻情況下,拍頻信號(hào)頻率差的大小正比于參考光與信號(hào)光的時(shí)延τz,而拍頻信號(hào)的幅度正比于測(cè)試光信號(hào)強(qiáng)度。因此,根據(jù)拍頻信號(hào)的幅頻特性,可以實(shí)現(xiàn)對(duì)于待測(cè)光纖上特征傳感點(diǎn)的定位。
假設(shè)z為傳感點(diǎn)位置,則位置計(jì)算公式[8]為
其中:c為光速;n為光纖折射率;η為線性掃頻速率。
1.2 OFDR 光纖傳感器應(yīng)變測(cè)量原理
OFDR 分布式光纖利用纖芯中的高密度弱反射光纖光柵實(shí)現(xiàn)應(yīng)變的測(cè)量,高密度弱反射光纖光柵傳感器如圖2 所示。
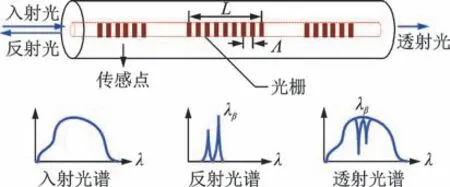
圖2 高密度弱反射光柵傳感器示意圖Fig.2 Schematic diagram of high-density weak reflection grating sensors
當(dāng)一束寬帶光傳輸?shù)絺鞲衅鳀艆^(qū)時(shí),在柵區(qū)折射率周期性作用下,只有特定波長(zhǎng)的光信號(hào)被反射。該特定波長(zhǎng)稱之為中心波長(zhǎng)λB,中心波長(zhǎng)取決于光柵周期Λ與有效折射率neff,根據(jù)模式耦合理論,反射光譜中心波長(zhǎng)表達(dá)式為
任何引起光柵周期Λ、有效折射率neff變化的因素都可以使傳感器中心波長(zhǎng)發(fā)生偏移,正是根據(jù)這一原理,光柵傳感器具有傳感能力。
當(dāng)存在溫度或者應(yīng)力作用于某一光柵時(shí),若其中心波長(zhǎng)偏移量為Δλ,則對(duì)應(yīng)的頻移[9]為
由于光源是線性掃頻光,頻移Δf引入的時(shí)延τz為
其中:η為光源線性掃頻速度。
由式(6)可知,求解光柵波長(zhǎng)偏移量的關(guān)鍵是時(shí)延τz,而通過上述信號(hào)間的互相關(guān)分析便能獲得時(shí)延。因此,經(jīng)式(5)可計(jì)算得到布拉格光柵波長(zhǎng)偏移量為
光柵中心波長(zhǎng)偏移與應(yīng)變、溫度的關(guān)系[10]為
其中:ΔT為溫度變化量;ε為光纖所受應(yīng)變;Kε為光柵應(yīng)變靈敏度系數(shù);KT為光柵溫度靈敏度系數(shù)。
假設(shè)待測(cè)OFDR 分布式光纖所處環(huán)境恒溫,光纖僅受應(yīng)力作用,由式(7)和式(8)可知,OFDR 分布式光纖所測(cè)應(yīng)變?yōu)?/p>
2 復(fù)合材料層板沖擊有限元仿真
2.1 復(fù)合材料層板沖擊有限元仿真模型
采用有限元分析軟件ABAQUS 建立復(fù)合材料層板結(jié)構(gòu)沖擊仿真模型,如圖3 所示,仿真模塊選擇顯示動(dòng)力學(xué)模塊。錘頭為半徑7.5 mm 的半球形錘頭,錘體長(zhǎng)為40 mm,密度為7.8 g/cm3,彈性模量為210 GPa,泊松比為0.3。復(fù)合材料層板尺寸為400 mm×400 mm×2 mm,每層鋪層厚度為0.2 mm,共鋪設(shè)5 層,鋪層形式自下而上為[45°/0°/-45°/90°/45°],鋪層基本材料屬性如表1 所示。采用四端固支方式,沖擊錘距離復(fù)合材料層板上表面1 mm。

表1 鋪層基本材料屬性Tab.1 Basic material properties of ply
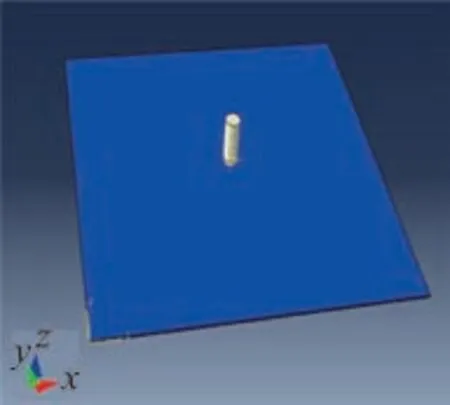
圖3 復(fù)合材料層板沖擊仿真模型Fig.3 Impact simulation model of composite material board
2.2 有限元仿真結(jié)果分析
為探究復(fù)合材料層板在不同位置沖擊作用下的應(yīng)變分布與變化規(guī)律,分別選擇板面3 個(gè)代表性坐標(biāo)位置作為沖擊點(diǎn)。以復(fù)合材料層板上側(cè)表面左下角為坐標(biāo)原點(diǎn)O,建立相應(yīng)直角坐標(biāo)系,模擬沖擊點(diǎn)坐標(biāo)如圖4 所示。
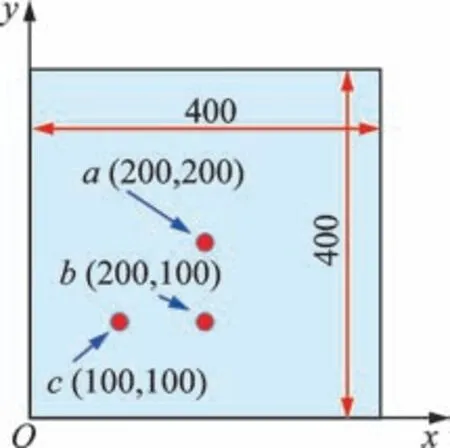
圖4 模擬沖擊點(diǎn)位置示意圖(單位:mm)Fig.4 Schematic diagram of simulated impact pointlocation (unit:mm)
速度為5 m/s 時(shí),沖擊點(diǎn)a和b對(duì)應(yīng)的復(fù)合材料層板表面應(yīng)變響應(yīng)云圖如圖5 所示。由圖可知,應(yīng)變幅值最大處位于沖擊點(diǎn)所在位置,且距離沖擊點(diǎn)越遠(yuǎn)應(yīng)變幅值越小。進(jìn)一步對(duì)板面典型路徑下不同時(shí)刻的應(yīng)變響應(yīng)進(jìn)行分析,沖擊點(diǎn)a對(duì)應(yīng)的不同應(yīng)變提取路徑如圖6 所示,沖擊點(diǎn)a引起的板面AB路徑上不同時(shí)刻的應(yīng)變響應(yīng)曲線如圖7 所示。
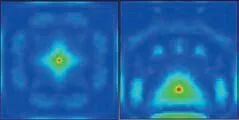
圖5 沖擊點(diǎn)a 和b 應(yīng)變響應(yīng)分布云圖Fig.5 Strain response distribution of impact point a and b

圖6 沖擊點(diǎn)a 對(duì)應(yīng)的不同應(yīng)變提取路徑Fig.6 Extraction diagram of different strain paths at impact point a
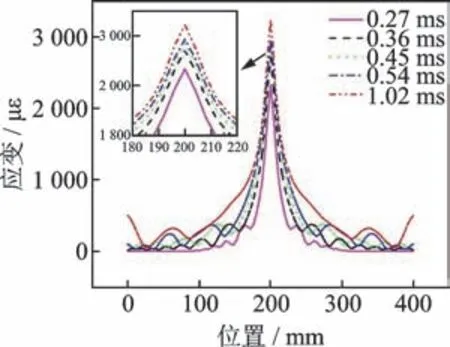
圖7 沖擊點(diǎn)a 對(duì)應(yīng)的路徑AB 應(yīng)變響應(yīng)曲線Fig.7 Strain response curve of path AB corresponding to impact point a
由圖7 可以看出,峰值對(duì)應(yīng)的x,y方向坐標(biāo)與沖擊點(diǎn)a所在位置完全對(duì)應(yīng)。在同一時(shí)刻,應(yīng)變幅值沿著沖擊點(diǎn)a兩側(cè)呈指數(shù)形式衰減,即沖擊載荷所在位置的應(yīng)變大于該路徑其他位置應(yīng)變。因此,可以通過測(cè)量并對(duì)比該路徑上各傳感點(diǎn)的應(yīng)變響應(yīng)來確定沖擊點(diǎn)所在位置坐標(biāo)。考慮到實(shí)際沖擊載荷加載位置的隨機(jī)性,在x和y方向布置的應(yīng)變感知路徑通常與沖擊點(diǎn)存在一定距離。
本研究選取沖擊速度為2.5,5 和10 m/s 時(shí),對(duì)于沖擊點(diǎn)位置a給出提取路徑CD上不同沖擊速度對(duì)應(yīng)的應(yīng)變響應(yīng)曲線,如圖8 所示。由圖可知:隨著沖擊速度的增大,相應(yīng)路徑的應(yīng)變峰值逐漸增大.由于沖擊點(diǎn)a與路徑CD存在一定的距離,使得相應(yīng)路徑的應(yīng)變響應(yīng)曲線出現(xiàn)較寬的應(yīng)變集中區(qū)域,應(yīng)變幅值也相應(yīng)減小,但應(yīng)變響應(yīng)峰值所在坐標(biāo)仍與沖擊點(diǎn)a所在位置基本對(duì)應(yīng)。
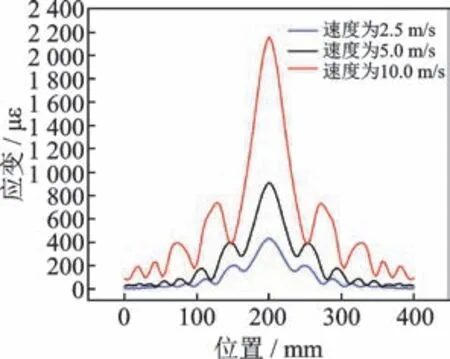
圖8 沖擊點(diǎn)a 對(duì)應(yīng)的路徑CD 應(yīng)變響應(yīng)曲線Fig.8 Strain response curve of path CD corresponding to impact point a
3 沖擊定位原理與算法仿真驗(yàn)證
3.1 應(yīng)變幅值非線性加權(quán)定位算法原理
質(zhì)心定位算法是一種無需測(cè)距的定位算法[11],僅需傳感節(jié)點(diǎn)的位置信息。然而,質(zhì)心定位算法屬于一種粗精度定位算法,其精度取決于待定位點(diǎn)附近傳感器的數(shù)量及分布情況。假設(shè)傳感器節(jié)點(diǎn)分別為S1,S2,…,Si,實(shí)際待定位點(diǎn)為So,則基于傳感器節(jié)點(diǎn)的定位預(yù)測(cè)坐標(biāo)為Se(xe,ye)
由式(10)可知,待定位點(diǎn)的坐標(biāo)預(yù)測(cè)僅依靠傳感節(jié)點(diǎn)的位置信息,并未考慮傳感節(jié)點(diǎn)所測(cè)物理量特征與待定位點(diǎn)坐標(biāo)之間的聯(lián)系[12]。應(yīng)變響應(yīng)幅值隨著沖擊點(diǎn)與傳感節(jié)點(diǎn)距離的增大而呈現(xiàn)指數(shù)形式衰減[13],傳感器所測(cè)應(yīng)變?cè)酱螅砻髟搨鞲衅骶嚯x沖擊點(diǎn)越近。本研究在傳統(tǒng)質(zhì)心加權(quán)定位方法基礎(chǔ)上,提出基于應(yīng)變幅值非線性加權(quán)的質(zhì)心定位方法,用以提高沖擊定位的精度。
其中:m為權(quán)函數(shù)w的加權(quán)次數(shù);函數(shù)gi為第i個(gè)應(yīng)變值占監(jiān)測(cè)區(qū)域內(nèi)應(yīng)變測(cè)量總值的比例函數(shù)。
根據(jù)上述分析,可得到應(yīng)變非線性加權(quán)質(zhì)心法對(duì)應(yīng)的坐標(biāo)計(jì)算方法為
加權(quán)次數(shù)m的選擇應(yīng)以定位誤差目標(biāo)函數(shù)最小為準(zhǔn)則。定義定位誤差目標(biāo)函數(shù)Eall(n)為n個(gè)沖擊位置預(yù)測(cè)坐標(biāo)絕對(duì)值誤差的平均,即
其中:LEi為第i個(gè)沖擊點(diǎn)預(yù)測(cè)坐標(biāo)絕對(duì)誤差值。
3.2 算法仿真驗(yàn)證
為驗(yàn)證基于應(yīng)變幅值非線性加權(quán)質(zhì)心定位算法的可行性,隨機(jī)選取8 個(gè)不同位置的代表性沖擊點(diǎn),各點(diǎn)坐標(biāo)如表2 所示。設(shè)置2 條經(jīng)過板面中心且與x,y坐標(biāo)軸分別平行的應(yīng)變提取路徑MN和PQ,模擬沖擊點(diǎn)位置及路徑提取如圖9 所示。
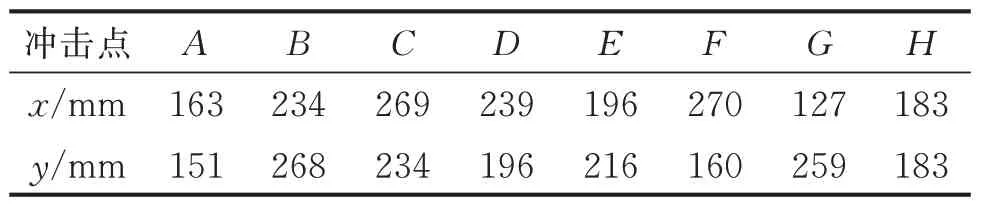
表2 沖擊點(diǎn)坐標(biāo)Tab.2 Impact point coordinates
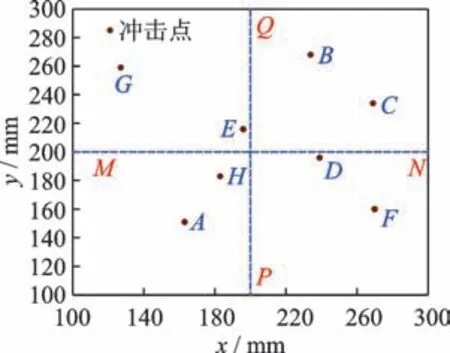
圖9 模擬沖擊點(diǎn)位置及路徑提取示意圖Fig.9 Schematic diagram of simulated impact point location and path extraction
不同加權(quán)值m對(duì)應(yīng)的定位誤差平均值曲線如圖10 所示。當(dāng)m=0.1 時(shí),各個(gè)沖擊點(diǎn)定位誤差的平均值最小;當(dāng)m在0.01~0.1 之間取值時(shí),誤差平均值變化平緩;當(dāng)加權(quán)值m在0.1~10 之間取值時(shí),誤差平均值隨著m增大而快速增加。因此,通過優(yōu)化非線性加權(quán)系數(shù)可以減小定位誤差。
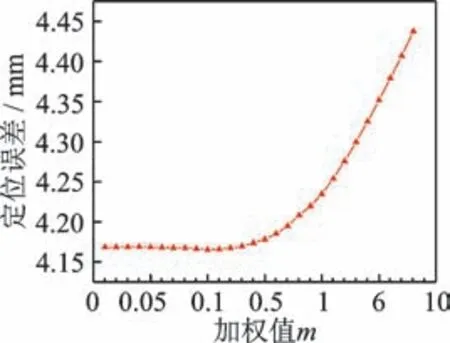
圖10 不同加權(quán)值m 對(duì)應(yīng)的定位誤差平均值曲線Fig.10 Average localization error curve corresponding to different weight values m
4 OFDR 光纖傳感器應(yīng)變敏感特性
4.1 應(yīng)變敏感特性試驗(yàn)系統(tǒng)
在復(fù)合材料層板表面沿x,y方向分別粘貼一段長(zhǎng)度為190 mm×190 mm 的OFDR 分布式光纖傳感器,每個(gè)方向各有30 個(gè)傳感節(jié)點(diǎn)。OFDR 分布式光纖傳感器布局與加載點(diǎn)位置如圖11 所示,其中:1#~30#為x方向傳感節(jié)點(diǎn)編號(hào);31#~60#為y方向傳感節(jié)點(diǎn)編號(hào)。在x,y方向各等間距布置8 個(gè)沖擊加載點(diǎn),相鄰加載點(diǎn)間距為10 mm,其中y方向加載點(diǎn)距y方向光纖72 mm,y方向加載點(diǎn)a距x方向光纖10 mm。類似地,x方向加載點(diǎn)距x方向光纖51 mm,x方向加載點(diǎn)i距y方向光纖10 mm。
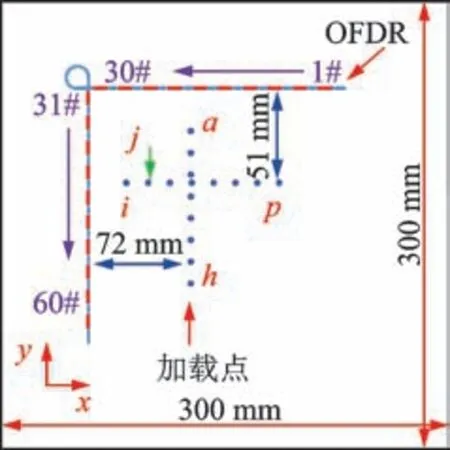
圖11 OFDR 分布式光纖傳感器布局與加載位置Fig.11 Schematic diagram of OFDR fiber optic sensor layout and loading position
4.2 OFDR 光纖傳感器沖擊響應(yīng)特性
以圖11 所示加載點(diǎn)進(jìn)行沖擊試驗(yàn),采用不銹鋼珠通過一定下落高度來模擬沖擊過程。根據(jù)試驗(yàn)結(jié)果可得,OFDR 分布式光纖傳感器內(nèi)部第18#,19#和20#傳感節(jié)點(diǎn)分別對(duì)應(yīng)沖擊加載點(diǎn)a~h,其應(yīng)變響應(yīng)變化峰值與沖擊加載距離之間的關(guān)系見圖12。由圖可知,當(dāng)沖擊能量固定時(shí),在0~7 cm 的范圍內(nèi),隨著沖擊距離的增加,相關(guān)傳感節(jié)點(diǎn)所測(cè)動(dòng)態(tài)應(yīng)變響應(yīng)變化峰值逐漸減小,且趨于平緩。考慮到光纖信號(hào)受噪聲及漂移影響,存在約2~3 με 波動(dòng),因此OFDR 光纖傳感器能夠感受沖擊響應(yīng)的有效范圍約在0~7 cm 之間。

圖12 應(yīng)變響應(yīng)變化峰值與沖擊距離變化規(guī)律Fig.12 The change law of strain response peak value and impact distance
5 復(fù)合材料層板光纖沖擊定位試驗(yàn)
5.1 復(fù)合材料層板沖擊定位監(jiān)測(cè)試驗(yàn)系統(tǒng)
復(fù)合材料層板沖擊定位監(jiān)測(cè)試驗(yàn)系統(tǒng)如圖13所示,主要由復(fù)合材料層板、OFDR 分布式光纖傳感器、光頻域反射型光纖解調(diào)儀以及計(jì)算機(jī)組成。復(fù)合材料層板尺寸為600 mm×600 mm×2 mm,采用PCB 力錘施加沖擊載荷。

圖13 復(fù)合材料層板沖擊定位監(jiān)測(cè)系統(tǒng)Fig.13 Schematic diagram of impact localization results of composite panels
試驗(yàn)監(jiān)測(cè)區(qū)域大小為280 mm×280 mm,復(fù)合材料層板表面粘貼的OFDR 分布式光纖傳感器布局形式經(jīng)優(yōu)化后,如圖14 所示。
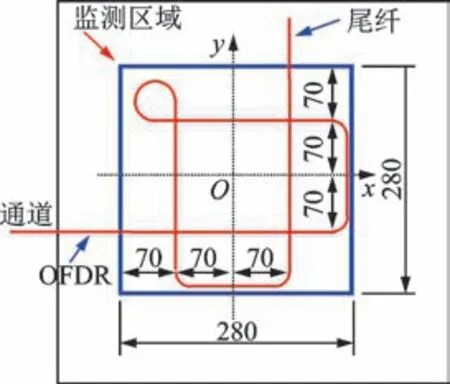
圖14 復(fù)合材料層板OFDR分布式光纖優(yōu)化布局(單位:mm)Fig.14 Optimized layout of OFDR distributed optical fiber on composite material board (unit:mm)
5.2 沖擊定位結(jié)果分析
為驗(yàn)證應(yīng)變幅值非線性加權(quán)沖擊定位算法,基于分布式光纖優(yōu)化布局,對(duì)復(fù)合材料層板隨機(jī)施加16 次沖擊。復(fù)合材料層板沖擊定位結(jié)果如圖15 所示,選取了不同加權(quán)值進(jìn)行定位預(yù)測(cè)。各沖擊點(diǎn)在不同加權(quán)值下相應(yīng)沖擊點(diǎn)定位誤差如圖16 所示。
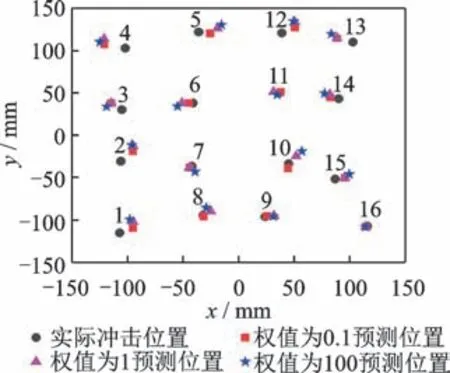
圖15 復(fù)合材料層板沖擊定位結(jié)果示意圖Fig.15 Schematic diagram of impact localization results of composite panels
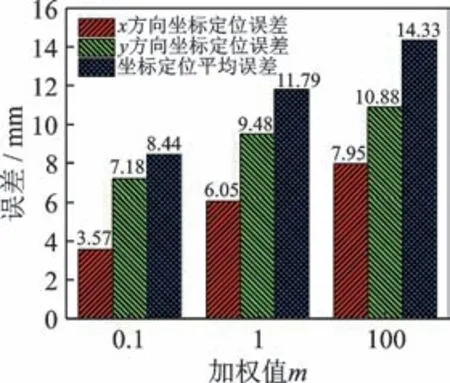
圖16 不同加權(quán)值m 對(duì)應(yīng)的沖擊點(diǎn)定位誤差Fig.16 Location error of impact point under different weights
由圖16 可以看出:當(dāng)加權(quán)值為0.1 時(shí),16 個(gè)沖擊點(diǎn)的平均定位誤差為8.44 mm;加權(quán)值為1 和100時(shí),平均定位誤差分別為11.79 和14.33 mm。當(dāng)加權(quán)值為0.1 時(shí),沖擊點(diǎn)預(yù)測(cè)的x坐標(biāo)與y坐標(biāo)平均誤差均顯著小于加權(quán)值為1 和100 的定位結(jié)果,因此選取合理的應(yīng)變幅值非線性加權(quán)系數(shù),可以提高沖擊定位精度。
6 結(jié)論
1)基于復(fù)合材料層板沖擊數(shù)值仿真,得到板面應(yīng)變響應(yīng)與分布規(guī)律。通過傳感路徑上應(yīng)變響應(yīng)幅值,可以確定沖擊點(diǎn)所在位置的橫、縱坐標(biāo)。
2)通過試驗(yàn)方法,得到?jīng)_擊加載條件下OFDR光纖傳感器動(dòng)態(tài)應(yīng)變響應(yīng)敏感范圍,從而為復(fù)合材料層板的分布式光纖傳感布局提供依據(jù)。
3)提出了一種基于應(yīng)變幅值非線性加權(quán)的沖擊定位算法,結(jié)合具有高空間分辨率感知特性的OFDR 分布式光纖傳感器,實(shí)現(xiàn)針對(duì)復(fù)合材料層板的沖擊載荷位置辨識(shí)。通過選取合適的加權(quán)值,所提方法可以提高復(fù)合材料層板結(jié)構(gòu)沖擊定位的精度。
猜你喜歡
建材發(fā)展導(dǎo)向(2021年14期)2021-08-23 00:56:16
紡織科技進(jìn)展(2021年3期)2021-06-09 08:07:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
纖維復(fù)合材料(2018年3期)2018-04-25 07:22:58
電子測(cè)試(2017年11期)2017-12-15 08:57:13
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
應(yīng)用化工(2014年10期)2014-08-16 13:11:29