基于RD-ANM的毫米波雷達動目標超分辨DOA估計方法
2023-11-06 08:57:50傅東寧陳展野張彥君譚曉衡
雷達學報 2023年5期
關鍵詞:信號
舒 月 傅東寧 陳展野* 黃 巖 張彥君 譚曉衡 陶 俊
①(重慶大學微電子與通信工程學院 重慶 400044)
②(北京華力創通科技股份有限公司 北京 100193)
③(華力創通-北方工大雷達射頻仿真聯合實驗室 北京 100144)
④(東南大學信息科學與工程學院毫米波國家重點實驗室 南京 210096)
⑤(東南大學信息科學與工程學院水聲信號處理教育部重點實驗室 南京 210096)
1 引言
車載雷達旨在實時獲取全面準確的路況和環境信息,輔助駕駛人員做出決策和保障行車安全[1]。毫米波雷達(Millimeter-wave Radar,MMW Radar)由于工作頻率高,分辨率高,體積小,且環境適應性好,兼具高性能和低成本,常被視為汽車主動安全領域的核心部件之一[2]。目前,車載毫米波雷達的研究熱點主要集中于4D (Four Dimensions)成像,對目標距離-多普勒-方位角-俯仰角的多維高分辨率精確測量的需求日益增長[3]。為滿足目標波達方位角(Direction of Arrival,DOA)估計精度和角度分辨率的高性能需求,且考慮到實際系統設計成本及實現,車載毫米波雷達常采用時分復用-多輸入多輸出(Time Division Multiplexing-Multiple Input Multiple Output,TDM-MIMO)體制,通過發射線性調頻連續波(Linear Frequency Modulation Continuous Wave,LFMCW) 信號,在接收端進行通道分離并合成等效的虛擬陣列,從而能夠獲得更大的陣列孔徑,提升DOA估計算法的角度分辨率和估計精度。
除了硬件性能上的改進,通過超分辨DOA估計的信號處理方法提升角度分辨率和精度也是毫米波雷達一項重要的研究課題。目前,DOA估計方法大致分為3類,包括非參數模型譜估計類算法、傳統超分辨估計類算法、網格化超分辨估計類算法等。基于量測數據的非參數模型譜估計類算法[4,5],典型如CBF,Capon以及IAA,其優勢在于簡單易實現,但受限于陣列孔徑或信噪比條件,在測角分辨率和精度上存在一定限制。基于子空間分解或擬合的傳統超分辨估計類算法[6],典型如MUSIC,ML以及WSF,雖能夠突破陣列瑞利限的限制,實現DOA超分辨精確估計,但本質上屬于參數化方法,算法性能嚴重依賴于預設的模型參數,對實際應用場景和外部信號環境的要求較高[7]。基于稀疏信號表示和壓縮感知理論的網格化超分辨DOA估計算法[8],典型如OMP-DOA,L1-SVD,RVM-DOA等,該類算法在離散角度域稀疏建模,對陣列孔徑的依賴程度低,能夠在少快拍(甚至是單快拍)、低信噪比、信源相關/相干等非理性外部環境下實現DOA的精確估計[9],但存在理想化網格假設所導致的固有DOA估計字典失配問題,雖然有學者后續又提出了如增加網格劃分密度、網格不均勻劃分、字典自校正等技術來進一步修正模型誤差[10],改善該誤差所帶來的影響,但計算不穩定性的增加以及與精確稀疏重構條件之間的沖突進一步限制了算法性能的提升。為解決網格失配問題,近年來,基于原子范數理論和范德蒙德定理的無網格超分辨DOA估計算法受到了眾多學者的廣泛關注。由Chandrasekaran等人[11]提出的原子范數理論指出:原子范數利用原子集合凸包的連續特性來計算范數,能夠在對信號施加稀疏約束的同時保證其參數空間的連續性[12],這相當于直接在連續域上進行稀疏建模,從而規避了網格離散化表示的過程。Tang等人[13]最先將原子范數理論引入無噪條件下的線譜估計問題中。Bhaskar等人[14]進一步對有噪情況下的復正弦疊加信號的頻率和振幅估計問題進行了討論,并提出原子范數軟閾值(Atomic Norm Soft Thresholding,AST)算法。Yang等人[15,16]將線譜估計問題進一步擴展至DOA估計領域,并對等距均勻及稀疏陣列、完整及壓縮數據場景下的基于原子范數最小化的DOA估計問題進行了研究。無網格超分辨DOA估計算法有著完備的理論支撐和成熟的數學工具,其本質在于以優化的方式重構陣列的協方差矩陣,然后利用該矩陣的范德蒙德分解實現目標的DOA估計,該類算法能夠取得相較于前述網格化超分辨DOA估計算法更優的DOA估計性能,較符合車載毫米波雷達對于目標測向的高應用需求。
車載場景下時常面臨上述非理想的信號環境,如當目標高速運動時,距離徙動造成相干累積時間減少,無法獲得大量的獨立同分布快拍數據;當雷達本身發射功率有限、毫米波大氣傳播衰減較大且目標的散射截面積較小時,接收信號的信噪比較低;當探測場景中存在來自地面或其余物體反射的多徑,或包含來自同距同速緊鄰目標的信號時,接收信號內將包含相關(相干)信號等。除非理想的外部信號環境外,毫米波雷達的待檢測目標多為車輛、騎行者、行人等運動目標。為此,本文針對車載毫米波雷達應用所面臨的實際問題,如少快拍、低信噪比、信源相干以及目標運動等情況,將研究重點放在對受限孔徑條件下雷達角度分辨率和測角精度的提升上,提出了一種基于距離多普勒域原子范數最小化(Range-Doppler Atom Norm Minimize,RD-ANM)的毫米波雷達動目標超分辨DOA估計方法。該方法主要包括如下步驟:首先,構建基于動目標雷達回波的距離多普勒域陣列接收信號;其次,設計動目標多普勒耦合相位補償矢量,用以削弱目標運動對DOA估計的影響;最后,提出了基于原子范數框架的多目標超分辨DOA估計方法。相較于車載毫米波雷達現使用的DOA估計算法,本文算法能夠在基于低信噪比條件和單快拍處理前提下獲得較高的測角分辨率和估計精度,以及擁有不犧牲陣列孔徑對相干信號進行處理的穩健性能。理論分析、數值仿真以及實測實驗驗證了本文算法的有效性。
2 TDM-MIMO毫米波雷達動目標回波模型
考慮如圖1所示的車載TDM-MIMO毫米波雷達探測場景[17],發射陣列是一個陣元數為MTX、陣元間距為dT的均勻線陣,接收陣列是一個陣元數為MRX、陣元間距為dR的均勻線陣,通常情況下,dR=λ/2,dT=MRXdR。在TDM-MIMO體制下,各個發射天線通過分時交替循環工作的方式發射LFMCW信號,接收陣列接收相應的回波信號,并進行模數轉換、去斜以及合并處理,得到最終的等效虛擬單輸入多輸出(Single Input Multiple Output,SIMO)陣列的接收差頻基帶數字信號。假設空域包含K個遠場目標,方位角分別為θ1,θ2,...,θK,以雷達開始工作時,第1個發射陣元所對應的第1個接收陣元作為參考陣元,暫時考慮目標低勻速運動,即距離徙動未超過一個距離單元的情況,則一個相干處理周期(Coherent Processing Interval,CPI)內,陣列接收到的差頻基帶數字信號模型[18]可以表示為
圖1 車載TDM-MIMO毫米波雷達探測場景示意圖Fig.1 Schematic diagram of vehicle borne TDM-MIMO MMW radar detection scene
其中,mt=1,2,...,MTX,mr=1,2,...,MRX,l=1,2,...,L為1個CPI內第l個LFMCW信號,L為每個CPI所包含的LFMCW信號數,fs為ADC采樣率,n=1,2,...,N為快時間變量,N為單個LFMCW信號的ADC采樣點數;k=1,2,...,K為目標索引,αk,?k,Rk,vk分別為目標的差頻基帶信號振幅、固定相位、初始距離以及運動速度,分別為目標的距離和多普勒頻率;fc為發射載頻,c為光速,λ=fc/c為發射波長;u=B/Tup為調頻斜率,B為調頻帶寬,Tup為調頻時間,Tc為斜坡重復周期,Tint=MTXTc為特定發射天線的發射時間間隔;wmt,mr(n,l)為均值為0、方差為σ2的加性高斯白噪聲。
為便于后續信號分析和處理,將式(1)轉化為
3 基于RD-ANM的毫米波雷達動目標超分辨DOA估計方法
由式(2)中的x(n,l),n=1,2,...,N,l=1,2,...,L構成了毫米波雷達的原始回波數據(Raw Data)塊。如圖2所示,對原始回波數據塊中各接收通道對應的回波數據平面進行距離向和多普勒向的2DDFT[19](Two-Dimensional Discrete Fourier Transform)處理,得到距離-多普勒譜(Range-Doppler Map,RDM)矩陣塊
圖2 距離向和多普勒向的2D-DFT處理示意圖Fig.2 Schematic diagram of range dimension DFT and Doppler dimension DFT
其中,q=1,2,...,N,p=1,2,...,L,D(q,p)表示第(q,p)點的2D-DFT變換結果。
對距離-多普勒譜矩陣塊D(q,p),q=1,2,...,N,p=1,2,...,L進行陣列天線維模值疊加(非相干累積),兩維單元平均恒虛警(Cell Averaging-Constant False Alarm Rate,CA-CFAR)檢測以及峰值分組(Peak Grouping)處理,得到目標檢測平面,此時與第k個目標相對應的平面內距離單元和多普勒單元將呈現峰值。提取峰值距離-多普勒單元坐標(qpeak,ppeak)后,即可對峰值距離-多普勒單元內所包含目標的距離及運動速度進行解算
在對目標的距離及速度信息進行解算的同時,回到距離-多普勒譜矩陣塊,提取各接收通道的距離多普勒譜在(qpeak,ppeak)處的復數數據D(qpeak,ppeak),構建基于動目標雷達回波的RD域的等效虛擬SIMO陣列的接收單快拍數據
其中,z ∈?={1,2,...,Z}?{1,2,...,K}表示分布在D(qpeak,ppeak)這一距離-多普勒單元內的目標。為便于后續信號處理及分析,將其轉換為
從式(7)可以看出,從RD域上提取出的復數數據仍然包含陣元間的相位差信息,可作為陣列的接收快拍數據,用于后續的DOA估計。基于RD域進行目標DOA估計的優勢在于:首先,不同距離和速度的目標會在角度維處理前得到充分分離,使得某一距離多普勒單元上需要進行DOA估計的信源個數進一步降低;其次,該框架下獲得的DOA估計結果能夠與目標的距離及速度信息相互關聯;然后,該框架下能夠對動目標的距離/角度單元走動以及能量散焦進行預補償處理,以削弱對后續DOA估計結果造成影響[20];最后,該框架下能夠利用相參和非相參累積增益進一步提升目標檢測的性能,還能夠改善角度維的處理信噪比,有利于后續的DOA估計[21]。
從式(7)也可以看出,在TDM-MIMO體制下,由于發射天線的切換機制,來自不同發射天線的LFMCW信號間會存在一個時間差,運動目標的多普勒頻率和該時間差所引起的相位變化會耦合到虛擬SIMO陣列目標導向矢量上,如若不在DOA估計前削弱該耦合相位的影響,則會導致最終的DOA估計產生錯誤。因此需要設計相應的耦合相位補償矢量對動目標的耦合多普勒相位進行補償,由于已經解算出了相應的距離-多普勒單元上的目標速度,可根據該速度解算值構造相應的相位補償矢量對耦合在虛擬SIMO陣列目標導向矢量上的運動目標多普勒相位進行補償
其中,·為點乘運算符,cz >0和?z ∈[0,2π)分別為sz的振幅和相位,a(θz)為第z個目標的虛擬SIMO陣列導向矢量。
獲得RD域的陣列接收信號,并對信號中所包含的動目標多普勒耦合相位進行補償后,即可基于原子范數相關理論,對目標DOA實現超分辨估計。對式(10)進行頻率預處理,將DOA估計參數θ的取值范圍由連續角度域映射至歸一化連續頻率域
其中,yvir即為最終所需的RD域上的陣列接收單快拍信號,fz=dR/λ(sin(θz)+1)∈[0,1),s為目標信號矢量,A(f)=[a(f1),a(f2),...,a(fZ)],a(fz)為經過歸一化頻率預處理后的第z個目標的虛擬SIMO陣列導向矢量
根據式(12)所述信號形式,定義原子a(f,?)和原子集合為
從式(12)和式(14)可以看出,RD域上的陣列接收單快拍數據可由原子集合中原子的非負線性組合來表示,這與稀疏表示中接收信號可由冗余字典中原子的非負線性組合來表示類似,但不同于冗余字典原子參數的離散化取值,原子集合中原子參數f是在連續域上連續取值的,此時DOA的估計過程可以看成是從包含無限不間斷原子的冗余字典中選取信號最稀疏表征的過程,這相當于直接在連續域上進行稀疏建模,規避了網格離散化表示的步驟,且算法性能不再受冗余字典原子間任意增加的相關性的影響。
由式(12)基于RD域原子范數最小化的去噪問題模型[16]可以表示為
其中,||·||A,1為l1原子范數
將式(15)轉化為等價半正定規劃(Semidefinite Program,SDP)形式[16]進行求解
其中,||yvir-x||為數據擬合項,γ為非負正則系數[14],用于平衡yvir的保真度以及構成x的原子系數矢量的稀疏度,x,u為待求解優化變量,u1為u中的第1個元素,t是自由變量,是避免出現平凡解的正則項。
通過求解式(17)所示的SDP優化問題可獲得Toeplitz矩陣T(u),T(u)可看成是以優化方式重構出的低秩、半正定陣列協方差矩陣,其存在如下形式的范德蒙德分解[22]
其中,r=rank(T(u))
4 實驗與分析
4.1 實驗場景說明
本文實驗場景設置如圖3所示,在該實驗場景中,我們考慮毫米波雷達靜止,多個同初始距離目標以相同速度但不同角度相對雷達在同一平面內做勻速直線運動的情況,例如在圖3中,平面內黑色點跡為TDM-MIMO陣列所處的位置,點目標(以綠色為例)相對雷達保持一定速度和角度做勻速直線運動,十字符號為該點目標的初始位置,當設定的運動方向為遠離雷達的方向時,目標的運動軌跡將呈現為以十字符號為起點,偏離y軸設定角度的直線。后經實驗證實該實驗場景下多目標間信號是相干的,因此此時應用RD域-MUSIC算法已無法對目標來向進行正確的估計,而采用RD域-前后向空間平滑(Forward and Backward Spatial Smoothing,FBSS) MUSIC算法對目標信號進行解相干處理后才能夠提取正確的目標DOA值,如圖4所示。
圖3 目標與陣列相對位置示意圖Fig.3 Schematic diagram of relative position between target and array
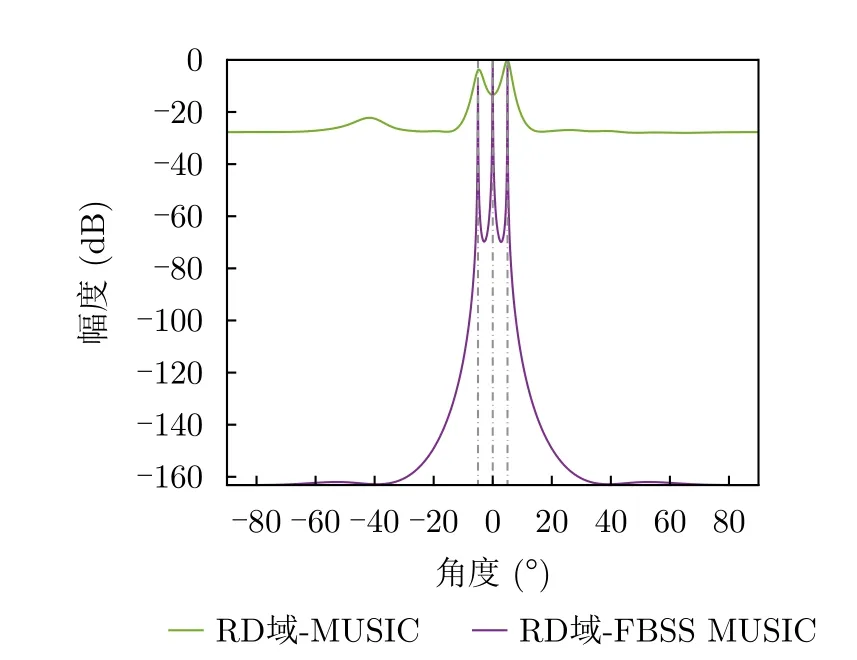
圖4 RD域-MUSIC及RD域-FBSS MUSIC對相干信源的處理Fig.4 RD-MUSIC’s and RD-FBSS MUSIC’s processing of coherent sources
實驗的仿真參數設置如表1所示。為驗證本文算法在單快拍、低信噪比以及信源相干場景下的測角分辨率及精度,本文依次選取RD域-FFT (單快拍)、RD域-FBSS MUSIC (多快拍)、RD域-IAA(單快拍)以及本文算法(單快拍)進行對比,同時,本文選取均方根誤差(Root Mean Square Error,RMSE)作為統計誤差分析指標,其計算表達式為
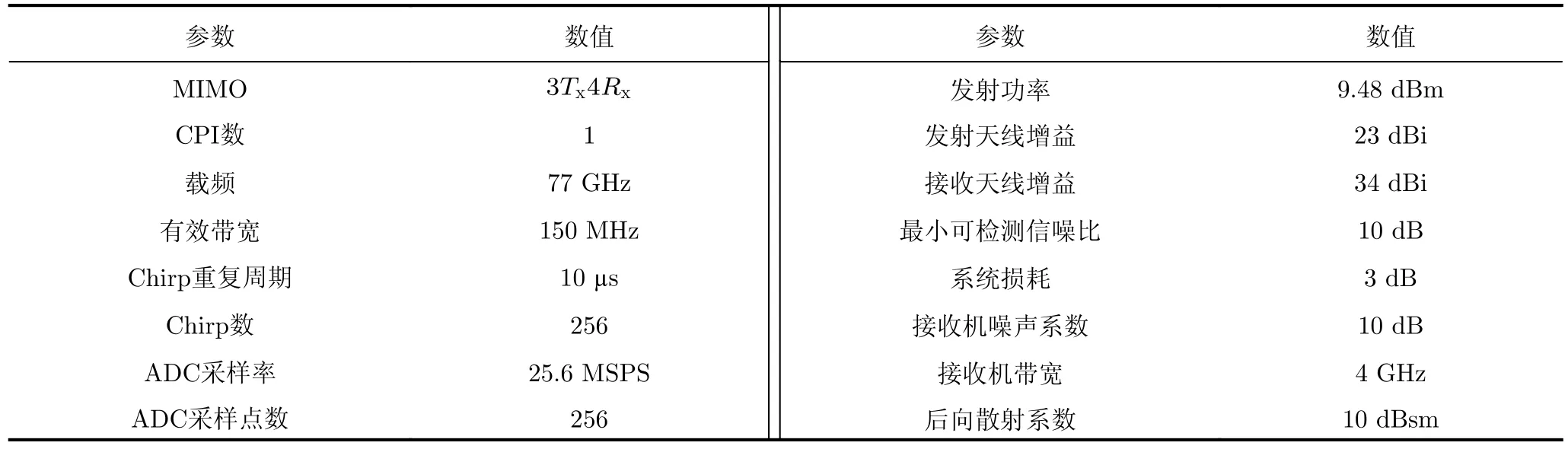
表1 實驗仿真參數Tab.1 The simulation parameters
4.2 計算復雜度對比分析
RD域-FFT的計算復雜度為O(MlogM),RD域-FBSS MUSIC的計算復雜度為(2PB(M -P+1)+P2B+P3+PKξ),RD域-IAA的計算復雜度為O(2M2K+MK+M3),本文算法計算復雜度為O(M3.5log(1/ζ)+M2+M3+MKξ),其中,N為LFMCW信號的ADC采樣點數,L為每個CPI所包含的LFMCW信號數,M為陣元數,P為平滑子陣陣元數,B為快拍數,K為信源數,ξ為搜索次數,ζ為收斂精度。由圖5可以看出,本文算法的計算復雜度較大,即以犧牲算力為代價來謀取較好的算法性能。
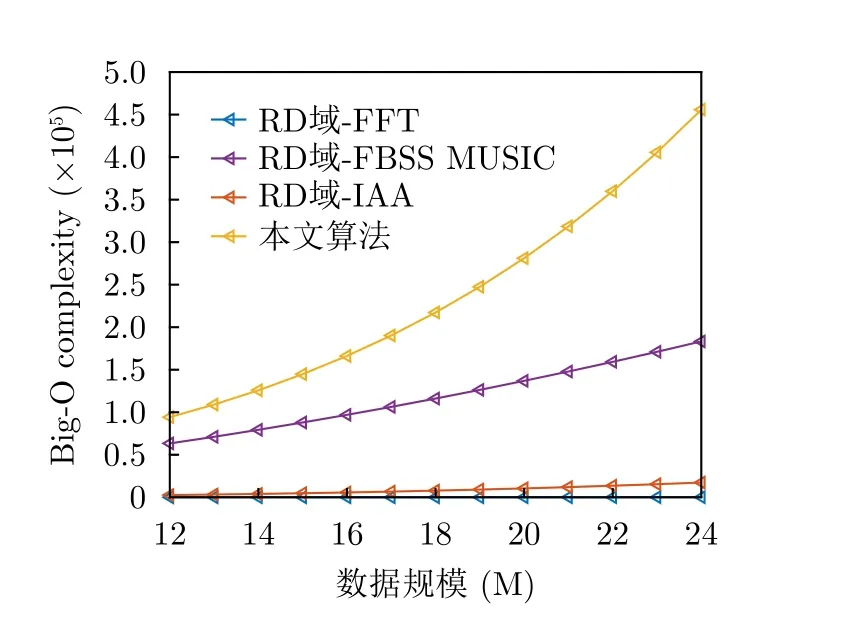
圖5 計算復雜度Fig.5 Computational complexity
4.3 耦合多普勒相位對DOA估計的影響
設定目標數K=3,3個目標相對于車載毫米波雷達的初始距離及運動速度均設置為R=50 m,v=10 m/s,波達方位角分別設置為θ1=-40?,θ2=-15?,θ3=38?。雷達原始回波信噪比根據基本雷達方程設置為22.5735 dB。TDM-MIMO陣列中接收陣列接收到動目標的雷達回波信號后,將進行模數轉換、去斜以及合并處理,從而得到等效虛擬SIMO陣列的雷達原始回波數據塊。對該原始回波數據塊中各接收通道對應的回波數據平面進行距離向和多普勒向相參累積,可得到RD譜矩陣塊,該RD譜矩陣塊包含了后續信號處理所需的RD域數據。對雷達原始雷達回波數據塊進行距離多普勒向二維相參累積后陣列單通道累積結果如圖6(a)所示,基于RD譜矩陣塊進行陣列天線維非相參累積、兩維CA-CFAR檢測(距離向CA-CFAR檢測閾值如圖6(c)所示,多普勒向CA-CFAR檢測閾值如圖6(d)所示)和峰值分組處理后,即可獲得目標檢測平面(圖6(b)),由圖6(b)可以看出,所設置的3個同距同速的動目標聚焦于檢測平面內的同一距離多普勒單元處,獲取該峰值距離-多普勒單元坐標,即可由式(5)、式(6)解算出包含在該峰值距離-多普勒單元內目標的距離及速度,由圖6(b)獲得的解算結果如表2所示,獲得的3個同距同速目標的距離和速度解算值分別為50 m和9.8925 m/s,后續可將目標距離速度與來向三者間關聯起來,以構成目標的三維參數信息。
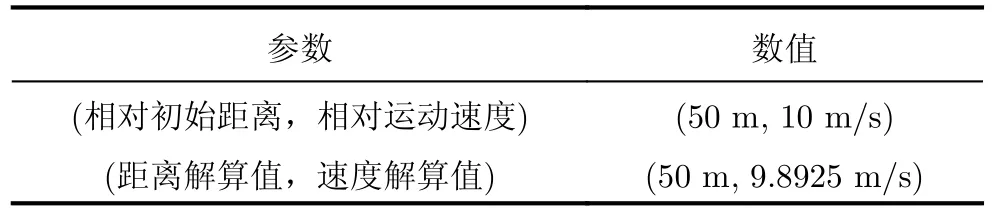
表2 目標參數Tab.2 Target parameter
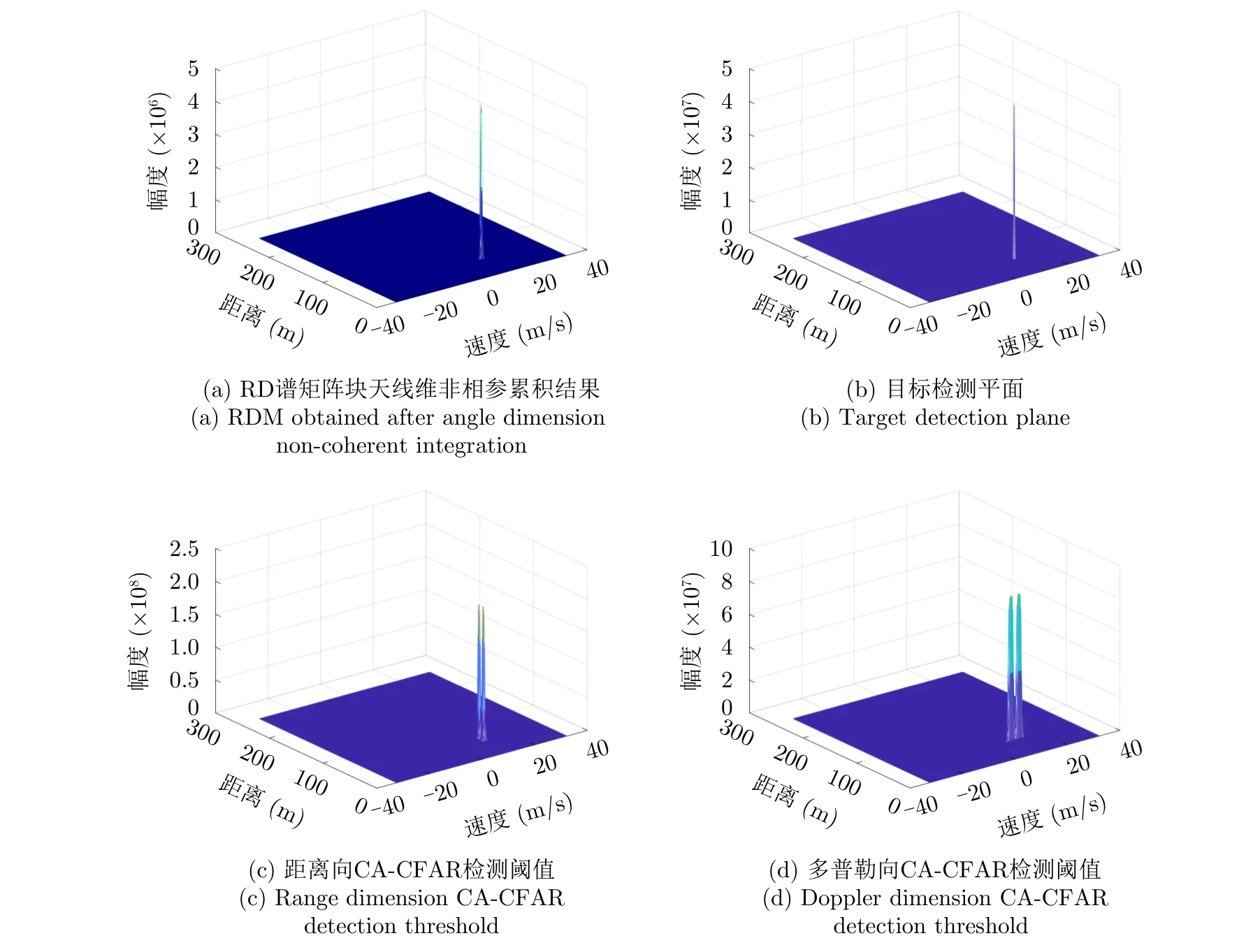
圖6 目標檢測Fig.6 Target detection
現在回到RD譜矩陣塊,提取虛擬SIMO陣列各接收通道在峰值距離-多普勒單元處的復數數據,構造陣列接收單次快拍數據,以及提取RD譜矩陣塊中峰值距離多普勒單元所在RA (Range-Angle)平面內復數數據,構造陣列接收的多次快拍數據(多快拍數據僅用于RD域-FBSS MUSIC算法的處理),分別采用RD域-FFT,RD域-IAA,RD域-FBSS MUSIC以及本文算法對目標進行一維DOA估計,DOA估計結果如圖7所示。從圖7所呈現的結果可以看出,若未在DOA估計前對動目標的多普勒耦合相位進行如式(9)、式(10)所示的預補償處理,得到的DOA估計結果與目標真實波達方位角之間將存在較大的偏差,而經過了動目標多普勒耦合相位預補償處理后DOA估計結果,能夠正確地反映目標的真實來向,從而驗證了在RD域進行DOA估計前對陣列接收中所包含的動目標多普勒耦合相位進行補償的必要性。
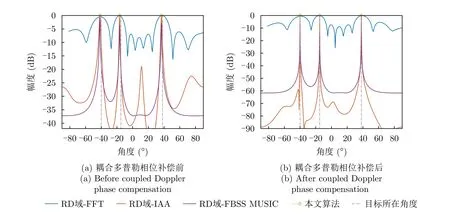
圖7 耦合多普勒相位對RD域-DOA估計的影響Fig.7 Effect of coupled Doppler phase on RD-DOA estimation
4.4 不同角度間隔下DOA估計性能分析
大角度間隔下的DOA估計實驗,基本參數設置同4.3節,3個目標波達方位角分別設置為θ1=-11.9?,θ2=1.2?,θ3=8.7?;θ1=-5?,θ2=0?,θ3=5?。DOA估計結果如圖8所示。從圖8可以看出,RD域-FFT由于受制于陣列孔徑,算法的角度分辨率和估計精度均不高,無法分辨較近間隔的目標來向且DOA估計結果與目標真實來向間存在一定的偏差;RD域-FBSS MUSIC,RD域-IAA能夠處理相干信源,且能夠呈現較尖銳的譜峰,DOA估計結果較精確;本文算法性能與兩者近似,同樣擁有較高的測角分辨率和精度。4類算法的信噪比(Signal to Noise Ratio,SNR)-均方根誤差(RMSE)如圖9所示,從圖9可以更為清晰地看出,RD域-FFT始終存在無法消除的均方根誤差,RD域-FBSS MUSIC,RD域-IAA和本文算法3類算法性能近似,但本文算法的均方根誤差在低信噪比條件下更低一些(圖9(a),典型如–10 dB條件下,RD域-FFT,RD域-IAA和RD域-FBSS MUSIC的RMSE分別為9.5653°,3.1078°,11.4527°,本文算法的RMSE為0.2308°),進一步降低角度間隔,這種優勢將更為明顯(圖9(b),典型如在–10 dB條件下,RD域-FFT,RD域-IAA和RD域-FBSS MUSIC的RMSE分別為8.4476°,20.4559°,27.8961°,本文算法的RMSE為0.5877°)。另外,為進一步測試本文算法在一定角度間隔下的信噪比極限,將原始回波信噪比降至–15 dB,重復實驗結果如圖10所示,蒙特卡羅實驗次數設置為300,從圖10可以看出,本文算法能夠清晰分辨不同目標來向時的信噪比下界是隨著目標角度間隔的減小而增加的,即目標來向越小,能清晰分辨來向所需的雷達原始回波數據的信噪比則越高。
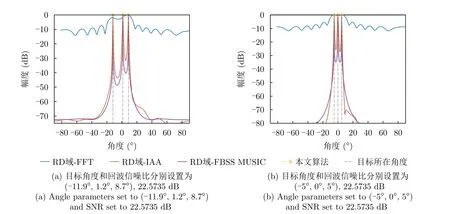
圖8 大角度間隔下的RD域-DOA估計結果Fig.8 RD-DOA estimation results at large angle intervals
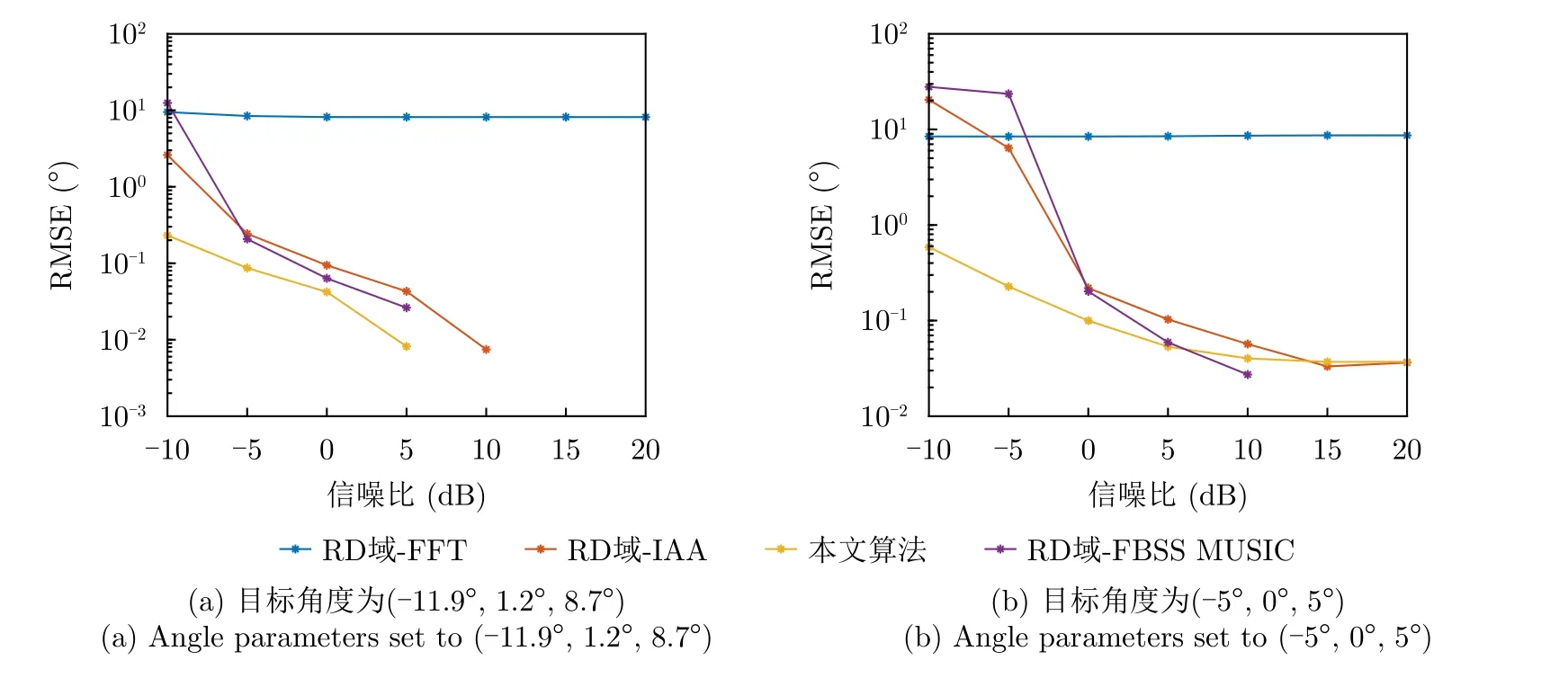
圖9 大角度間隔下的信噪比-均方根誤差圖Fig.9 SNR-RMSE diagram at large angle intervals
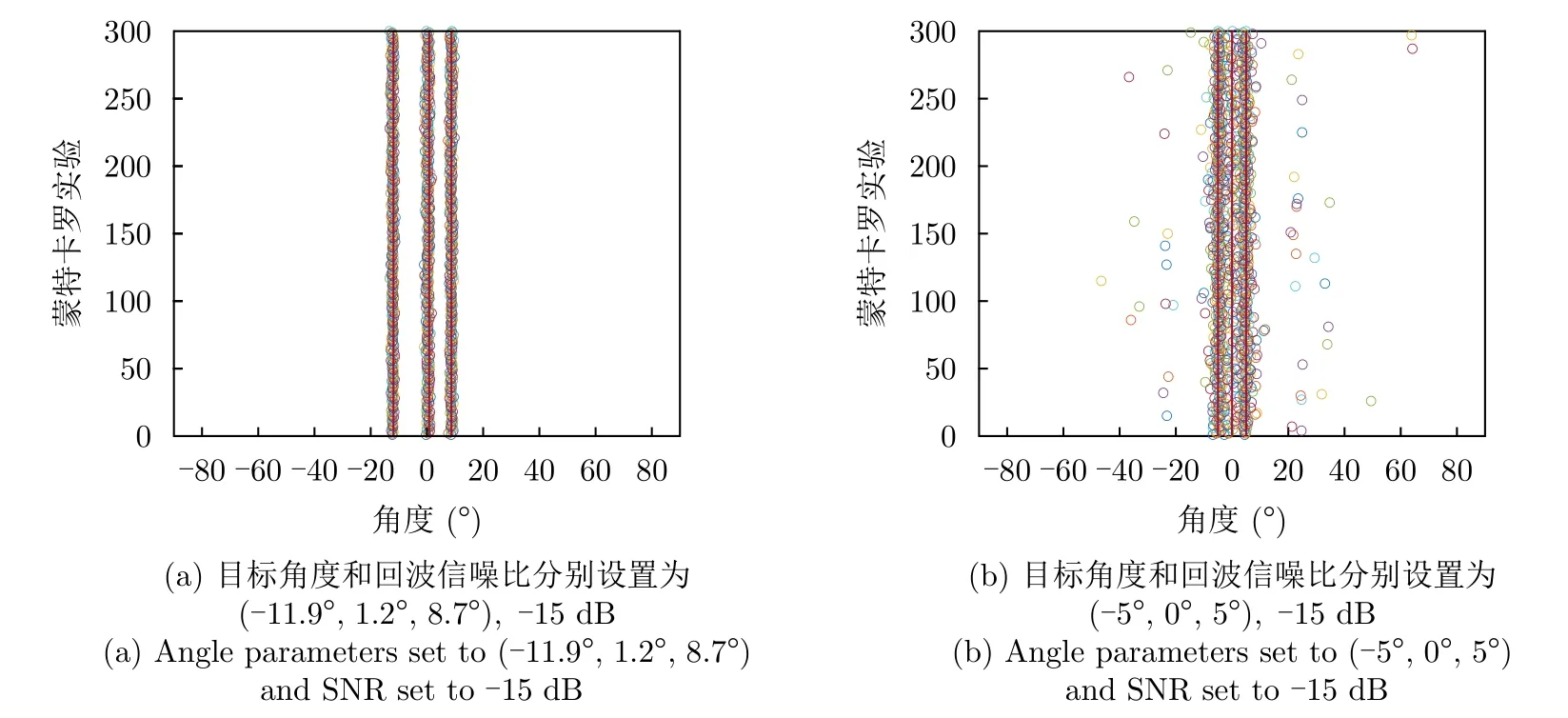
圖10 大角度間隔下的蒙特卡羅獨立重復實驗Fig.10 Monte Carlo independent repetition experiment at large angle intervals
小角度間隔下的DOA估計實驗,設定目標數K=2,兩個目標相對于車載毫米波雷達的初始距離及運動速度均設置為R=50 m,v=10 m/s,波達方位角分別設置為θ1=-2?,θ2=2?;θ1=-1?,θ2=1?。如前文所述,越小角度間隔條件下能夠清晰分辨目標來向的雷達回波信噪比越高,因此將雷達原始回波信噪比依據基本雷達方程設置為22.5735 dB,其余參數設置同4.3節。重復實驗結果如圖11所示,蒙特卡羅實驗次數設置為300。
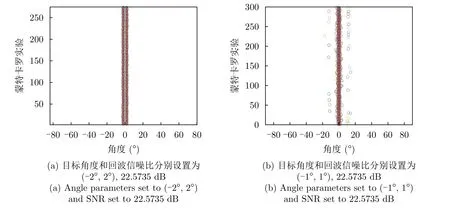
圖11 小角度間隔下的蒙特卡羅獨立重復實驗Fig.11 Monte Carlo independent repetition experiment at small angle intervals
從圖11可以看出,在目標小角度間隔(<5?)且較高信噪比條件下,本文算法能夠突破陣列孔徑的限制,在目標參數空間間隔遠低于1/?(DOF)/4」分辨率限制條件下[16,24],仍能以較高的概率檢索出相應的目標角度參數。但需要指出的是,事實上,基于上述距離多普勒域的處理框架,在過小角度間隔條件下,RD域FBSS-MUSIC和RD域-IAA算法的性能會更好,本文算法若需達到相當的性能,需進一步增加(虛擬)陣列孔徑。
4.5 相干信源分辨性能分析
考慮到車載毫米波雷達實際應用中可能接收到大量的相關/相干信號,故需要進一步驗證本文算法對于相關/相干信源的分辨能力。實際上,對于相關/相干信源的情況,此時由陣列協方差矩陣構建的信號子空間的維數將降為1,信號子空間與噪聲子空間相互滲透,兩者間的強正交性被破壞,使用RD域-MUSIC算法對由RD譜矩陣峰值距離多普勒單元所在RA平面內的復數數據構成的陣列多快拍數據進行DOA估計時,算法性能較差,如圖12(a)、圖12(b)中綠色曲線所示,此時RD域MUSIC已無法對目標來向進行正確的估計。因此采用前后向空間平滑技術對經典MUSIC算法進行改進,平滑子陣的陣元數設置為虛擬SIMO陣列陣元數的一半。由于前后向空間平滑技術犧牲了陣列孔徑對信號進行去相關(解相干),因此RD域FBSS-MUSIC算法可估計信源數也進一步降低,理論上可估計信源數降為2M/3,但經實驗測試最多僅能估計5個相干信源。而本文算法基于原子范數理論,本質上仍是沿用壓縮感知/稀疏表示框架對稀疏信號進行重構的過程,因此只要當入射信號的目標空間劃分使其滿足了稀疏特性時,即可無需任何預處理對目標信號解相干(這與網格化超分辨DOA估計方法類似),因此本文算法能夠在不犧牲陣列孔徑的基礎之上對相干信號進行處理,可估計信源數達11個(圖12(b)),但待估計信源數較多時,DOA估計結果會存在一定偏差,經實驗測試,能夠實現完全精確估計時的信源數為7個。
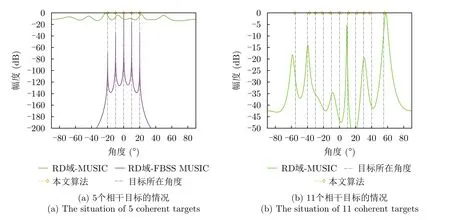
圖12 可分辨相干目標數Fig.12 Number of resolvable coherent targets
4.6 實測實驗及分析
本節基于車載毫米波雷達的實測數據對本文算法的有效性進行驗證,由于試驗條件有限,本次實驗采用內場靜止目標作為DOA估計對象。在實測場景中,TDM-MIMO陣列與目標間相對位置如圖13所示。雷達系統主要由德州儀器(Texas Instruments,TI)公司的AWR2243 BOOST評估板卡(中心頻率、調頻時間及調頻斜率分別設置為77 GHz,25.6 μs,30 MHz/μs)和DCA1000 EVM數據采集卡構成,TDM-MIMO陣列常規陣列合成所得到的角度分辨率為?θres=λ/MdRcosθ ≈9?。陣列與目標間的軸向距離(陣列與目標的y軸坐標間的相對距離)均設置為4.296 m,兩組實測數據中兩目標的徑向距離(目標x軸坐標與y軸間的相對距離)分別設置為(–0.3 m,0.05 m),(0.35 m,0.5 m),由軸向和徑向距離這兩個距離參數可推演出目標相對陣列的角度參數,經演算,兩組實測數據中目標角度參數分別為(–3.9946°,0.6668°),(0°,6.6386°)。現通過本文算法對兩組實測數據中所包含目標的來向進行估計,獲得的DOA估計結果如圖14、表3所示,由兩組實測數據獲得的目標DOA估計值分別為(–4.1°,0.3°),(0.7°,6°),可以看到,基于實測數據分布于同一距離多普勒單元內的目標(存在相關性)DOA估計值和推演值間存在一定的偏差,但DOA估計的平均誤差均保持在1°以內,實現了超分辨估計,從而驗證了本文算法的有效性。

表3 實測DOA估計結果Tab.3 DOA estimation results based on practical data
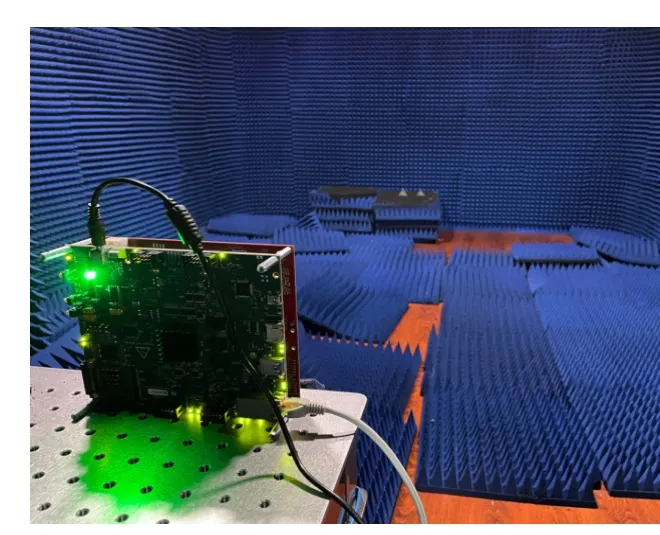
圖13 實測場景Fig.13 Practical scene
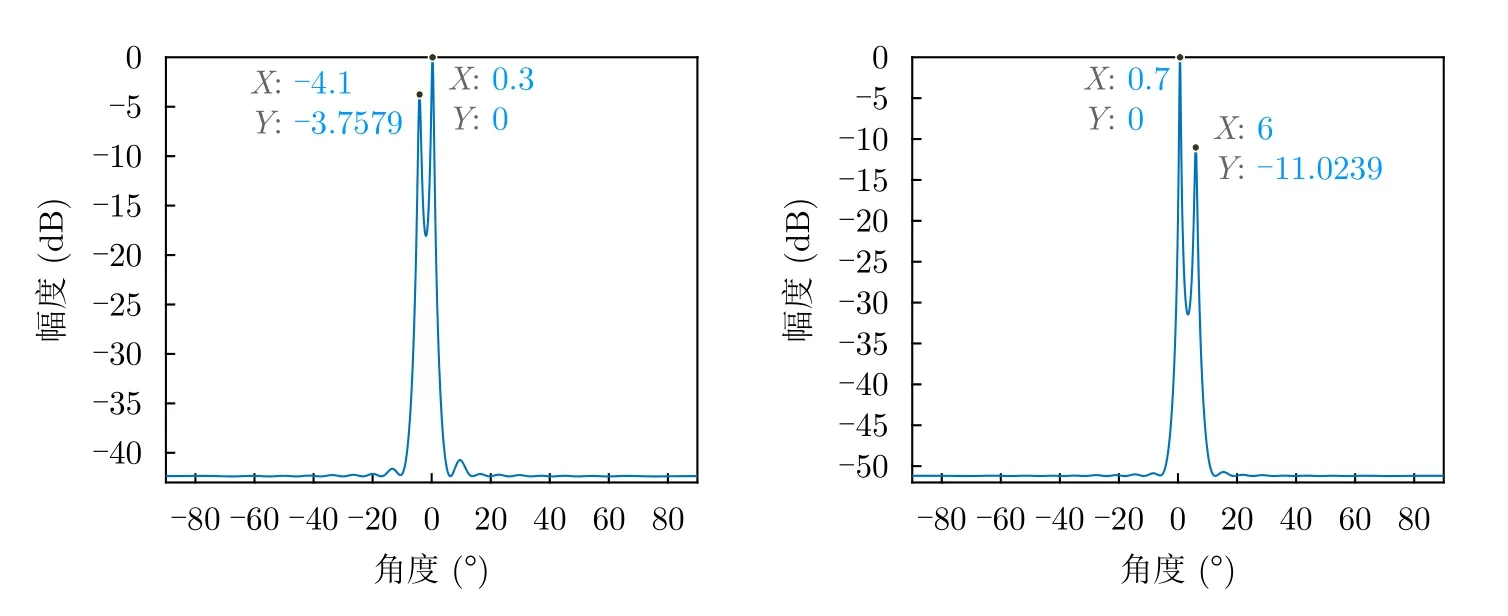
圖14 實測1、實測2 DOA估計示意圖Fig.14 Schematic diagrame of DOA estimation for test 1 and 2
5 結語
針對車載TDM-MIMO毫米波雷達動目標方位角估計問題,且考慮車載場景中常見陣列孔徑受限、低快拍、低信噪比及信源相干的情況,本文提出了一種基于RD-ANM的毫米波雷達動目標超分辨DOA估計方法,理論分析、數值仿真以及實測實驗驗證了本文算法能夠在非理想的外部環境下保持穩健的算法性能,有效地實現動目標的超分辨DOA估計,從而為車載毫米波雷達實現高精度、高分辨目標測向提供一種可能的解決方案。另外,本文考慮的場景較理想,沒有考慮如目標高速運動、非相對運動所產生的距離、角度單元走動因素的影響,也沒有對算法計算復雜度如何進一步降低進行相關研究,以及實測部分由于實驗條件限制未獲取到相應的運動目標數據等,這將會是我們下一階段所要進行的工作。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06